移动机器人模块化机械臂运动学分析
- 格式:pdf
- 大小:8.74 MB
- 文档页数:5
机器人手臂运动学分析与优化随着工业自动化的不断深入,机器人手臂已经成为工业制造中不可或缺的一部分。
机器人手臂能够完成机械化生产过程,提高生产效率、优化生产结构、实现生产信息化,为企业减少成本、提高生产效益、提升产品质量和降低缺陷率等方面带来了许多好处。
然而,机器人手臂本身的运动学分析与优化依然是关乎机器人手臂生产效率的重要问题。
本文将探讨机器人手臂运动学分析与优化,以期寻求更高效的解决方案。
一、机器人手臂的运动学分析机器人手臂分为完全机械式机器人和电脑控制的电动机器人两种类型。
不同类型的机器人手臂有着不同的动作学分析方法。
完全机械式机器人的运动学分析主要通过构建机器人手臂的运动学模型来完成,而电脑控制的电动机器人则需要通过进行无电量的建模杆件,再构建其运动方程组,以计算机辅助的方法解出机器人手臂的动作。
在机器人手臂运动学分析中,需要考虑到以下几个方面的运动特性:1. 关节角度:机器人手臂的每个关节都有一定的角度范围,可以通过关节角度的设定来确定机器人手臂的运动。
2. 关节速度:机器人手臂的关节速度与角度有直接关系。
在不同生产环境中,机器人手臂的最大关节速度是不同的。
3. 关节加速度:关节加速度是机器人手臂运动的另一个重要参数。
过大的关节加速度会造成机器人手臂失去平衡,从而导致机器人失效。
4. 工作半径:机器人手臂的工作半径直接决定其能够处理的最大物体尺寸。
工作半径过小则会导致机器人手臂无法操作大型物体,从而影响生产效率。
5. 所需空间:机器人手臂所需空间与其所操作的物体尺寸和数量有关。
过大的机器人手臂在狭小的生产场地中操作会十分困难,而过小的机器人手臂则会限制到生产效率的提高。
以上五个方面都会影响机器人手臂的运动学特性。
我们需要通过分析机器人手臂的运动学特性,来确定如何优化其运动学特性,以达到更高效的效果。
二、机器人手臂的运动学优化机器人手臂的运动学优化主要集中在如何提高机器人手臂的运动特性,来达到更快、更准确的运动效果。
新型机器人手臂的设计及其运动学分析一. 引言随着人工智能和机器人技术的不断发展,机器人的应用范围也日益扩大。
现代机器人的应用领域涉及军事、医疗、生产制造、深海勘探等多个方面。
机器人手臂作为机器人的关键组成部分,其设计和运动学分析对机器人的工作能力和性能至关重要。
本篇文章将介绍新型机器人手臂的设计及其运动学分析。
二. 机器人手臂的设计机器人手臂设计的核心是机械结构的设计,机器人手臂机械结构的设计要兼顾机械结构的刚度和机器人手臂的灵活性。
机器人手臂的机械结构关键包括伺服电机、节能器、速度减速器和传动部件等。
在机械结构的设计中,应根据机器人应用领域的不同来要求机器人手臂的机械结构要具有不同的特性。
1. 伺服电机机器人手臂的伺服电机通常采用直流伺服电机或步进电机。
直流伺服电机具有精度高,钟相好等特点,步进电机由于具有分区角高、平行精度高、加速扭矩大等特点,在机器人控制方面有其优势。
2. 节能器机器人手臂的节能器的设计本质上是为了提高机器人手臂机械结构的稳定性,以便更好地满足机器人控制要求。
机器人手臂的节能器分为弹性节能器和非弹性节能器,而在实际应用中可以有多重节能器组合使用的情况。
3. 速度减速器机器人手臂的速度减速器的设计是为了满足机器人手臂在加速和减速时力传递平稳,同时不影响机器人手臂的定位精度等要求。
4. 传动部件机器人手臂的传动部件设计主要是指转动机构和直线运动机构的设计。
转动机构通常采用齿轮传动、链条传动等传动方式,直线运动机构通常采用直线导轨、滑动轮等传动方式。
三. 机器人手臂的运动学分析机器人手臂的运动学分析的目的是研究机器人手臂的运动状态和位置变化规律。
机器人手臂的运动学分析包括正运动学和反运动学两个方面。
1. 正运动学机器人手臂的正运动学分析是研究机器人各关节以及机械臂的末端定位之间的运动变化规律。
正运动学可以求出机器人手臂的位置和方向等信息。
正运动学的基本思路是根据机械结构和运动控制算法,计算出各个关节的运动量,进而确定机械臂的末端位置。
机械臂的运动学与逆运动学分析机械臂是一种能够模拟人类手臂运动的自动化机器人。
它广泛应用于工业领域,用于完成各种复杂的操作任务。
机械臂的运动控制是实现其功能的关键,其中运动学和逆运动学分析是研究机械臂运动的基础。
一、机械臂的运动学分析运动学分析主要关注机械臂的位置、速度和加速度等运动参数的计算。
机械臂主要由关节连接的刚性杆件组成,每个关节可以沿特定方向进行旋转或平移运动。
在机械臂运动学中,我们关注的是机械臂末端执行器的位置和姿态。
1. 正运动学分析正运动学分析指的是根据机械臂各关节的运动参数,计算机械臂末端执行器的位置和姿态。
通常,我们采用坐标变换矩阵的方法来进行计算。
通过将各个关节的运动连续相乘,可以得到机械臂末端执行器相对于机械臂基座标系的位姿矩阵。
以一个3自由度的机械臂为例,设第一关节绕Z轴旋转角度为θ1,第二关节绕Y轴旋转角度为θ2,第三关节绕X轴旋转角度为θ3。
则机械臂末端执行器相对于基座标系的位姿矩阵可以表示为:[cos(θ2+θ3) -sin(θ2+θ3) 0 a1*cos(θ1)+a2*cos(θ1+θ2)+a3*cos(θ1+θ2+θ3)][sin(θ2+θ3) cos(θ2+θ3) 0 a1*sin(θ1)+a2*sin(θ1+θ2)+a3*sin(θ1+θ2+θ3)][0 0 1 d1+d2+d3][0 0 0 1]其中,a1、a2、a3和d1、d2、d3分别为机械臂的长度和位移参数。
通过这个矩阵,我们可以得到机械臂末端执行器的位置和姿态。
2. 速度和加速度分析除了机械臂末端执行器的位置和姿态,机械臂的速度和加速度也是非常重要的运动参数。
通过对机械臂运动学模型的导数运算,我们可以得到机械臂的速度和加速度表达式。
机械臂的速度可以表示为:v = J(q) * q_dot其中,v为机械臂末端执行器的速度向量,J(q)为机械臂的雅可比矩阵,q为机械臂各关节的角度向量,q_dot为各关节的角速度向量。
六自由度机械臂关节模块化技术研究共3篇六自由度机械臂关节模块化技术研究1六自由度机械臂关节模块化技术研究机械臂是一种能进行各种物理操作,如拾取、搬运、组装等操作的机器人。
它的灵活性和高效性使其广泛应用于工厂生产线、仓储配送、医疗手术等领域。
其中,六自由度机械臂由六个自由度的旋转关节组成,能够实现高自由度的空间运动。
六自由度机械臂的核心就是六个旋转关节,它们能够让机械臂在三维空间内做出各种姿态和动作。
传统的机械臂往往采用固定型结构,这就导致缺乏灵活性和可扩展性,同时维护和更新难度也较大。
为了解决这些问题,研究人员开始采用关节模块化技术,将机械臂的各个关节分离出来,使得不同的关节可以灵活组合,从而实现机械臂的可拆卸、可扩展和可维护的特性。
关节模块化技术的实现需要遵循一下几个原则。
首先,各个关节必须具有一定的标准化和通用性,以方便不同关节之间的组合和替换。
其次,需要采用灵活的连杆和扭簧来连接各个关节,以确保机械臂在运动过程中的准确性和稳定性。
最后,关节驱动系统应该保证高精度和高重复性的动作控制。
六自由度机械臂的六个关节模块可以分为以下几个部分:基座模块、肩模块、肘模块、腕模块、手模块和末端执行器模块。
每个模块都包含了一个或多个旋转关节以及驱动器、传感器、控制器等其他元件。
基座模块是机械臂的底部支撑,一般采用固定型结构,支撑整个机械臂的运动。
肩模块是第一关节模块,负责控制机械臂在水平方向的旋转。
肘模块是第二关节模块,负责控制机械臂在垂直方向的旋转。
腕模块由三个关节模块组成,负责控制机械臂的三维空间运动。
手模块负责控制机械臂的末端执行器的动作。
最后,末端执行器模块是机械臂的最后一个关节,负责控制机械臂末端执行器的姿态和动作控制。
关节模块化技术的应用有助于提高机械臂的性能和可靠性。
首先,关节模块化技术使机械臂的组装和维护变得更加简单和方便。
如果某个关节出现问题,只需要替换相应的关节模块即可,降低了机械臂的维护成本。
机械手臂的模块化设计与自动化操作探究摘要:机械手臂的设计是当前机器人科学研究范围中的热点。
基于此本文考虑的主要是机械手臂在模块化设计上的重量和使用的材料以及移动速度上的优化设计。
在对基础条件给予满足的基础下,使用最小化机械手臂的质量,去完成自动化动作的设计来满足相关要求。
关键词:机械手臂;优化设计;质量机械手臂的类型很多,每种类型的手臂在结构上都有非常明显的差异。
这种差异的问题在于它包含根据特殊要求设计的电子电路和圆棒。
另外,出于经济和美学要求,设计使用强度相同的零件(即每个零件的压力相同但尺寸不相等)。
机械臂轴承是必不可少的组件,可确保手和腕部自动操作。
机械臂的主要功能是允许手臂牢牢抓住物体并按照自动说明完成所需的位置处置。
这是需要在负载下设计的手臂,手臂结构设计的质量很小。
1方案设计本文通过对于机械臂结构进行分析的基础上,给出了机械手臂的模块化设计与自动化操作探究方案,针对机械臂采用模块化的拆分,从而通过这样的方式对于多个模块给予优化,然后使用硬件进行连接的方式把进行优化之后的多个模块去完成连接使其能够完成自动化运动。
通过机械臂中配置的控制模块能够把机械臂电机、位置传感器和相关控制器高效的进行集成,最后通过适当的整合,使其能够构成一个相对完善的机械臂运动系统。
机械臂在结构优化上的侧重点在于针对机械臂的一些主要位置给予模块化的设计和系统的优化。
使用这样的一种模块化的结构设计所需要进行开发的周期相对较短,并且机械效率十分理想,结构中的每一个部分都能够保持紧凑;模块选择的设计方法十分的标准,模块之间具备十分良好稳定的兼容性,并且在日后的使用上便于日常维护。
并且,由于缺少互动模块,因此作为设计人员能够提出按照自由度和自由组合的方式去完成模块组合,这样的一种方式降低了机械臂在开发中消耗的成本,通过针对机械臂模块化的设计,设计控制的形式相对比较简便,并且控制的耦合性以及控制效率和其他的控制模式相比有一定程度的提升,除此之外机械手臂系统通过多个模块之间的合理链接也可以十分便捷的完成链接和所需要的使用。
机械手臂运动学分析及运动轨迹规划机械手臂是一种能够模仿人手臂运动的工业机器人,正因为它的出现,可以将传统的人工操作转变为高效自动化生产,大大提高了生产效率和质量。
而机械手臂的运动学分析和运动轨迹规划则是实现机械手臂完美运动的关键。
一、机械手臂运动学分析机械手臂的运动学分析需要从几何学和向量代数角度出发,推导出机械手臂的位姿、速度和加速度等运动参数。
其中,机械臂的位姿参数包括位置和姿态,位置参数表示机械臂末端在空间中的坐标,姿态表示机械臂在空间中的方向。
对于机械臂的位姿参数,一般采用欧拉角、四元数或旋转矩阵的形式描述。
其中,欧拉角是一种常用的描述方法,它将机械臂的姿态分解为绕三个坐标轴的旋转角度。
然而,欧拉角的局限性在于其存在万向锁问题和奇异性等问题,因此在实际应用中,四元数和旋转矩阵往往更为常用。
对于机械臂的运动速度和加速度,可以通过运动学方程求出。
运动学方程描述了机械臂末端的速度和加速度与机械臂各关节角度和速度之间的关系,一般采用梯度方程或逆动力学方程求解。
二、机械手臂运动轨迹规划机械手臂的运动轨迹规划是指通过预设规划点确定机械臂的运动轨迹,以实现机械臂的自动化运动。
运动轨迹的规划需要结合机械臂的运动学特性和运动控制策略,选择合适的路径规划算法和控制策略。
在机械臂运动轨迹规划中,最重要的是选择合适的路径规划算法。
常见的路径规划算法有直线插补、圆弧插补、样条插值等。
其中,直线插补最简单、最直接,但是在复杂曲线的拟合上存在一定的不足。
圆弧插补适用于弧形、曲线路径的规划,加工精度高,但需要计算机械臂末端的方向变化,计算复杂。
样条插值虽能够精确拟合曲线轨迹,但计算速度较慢,适用于对路径要求较高的任务。
除了选择合适的路径规划算法,机械臂运动轨迹规划中还需要采用合适的控制策略。
常用的控制策略包括开环控制和闭环控制。
开环控制适用于简单的单点运动,对于复杂的轨迹运动不太适用;而闭环控制可以根据机械臂末端位置的反馈信息及时调整控制器输出,适用于复杂轨迹运动。
机器人机械手臂运动学与动力学分析1.引言随着科技的不断进步,机器人技术已经广泛应用于生产制造、医疗卫生、军事防务等领域。
机器人的机械手臂是其重要组成部分,通过其灵活的运动能力,使机器人能够执行各种任务。
在机械手臂的设计和控制中,运动学和动力学是两个重要的方面。
本文将对机械手臂的运动学和动力学进行深入分析。
2.机械手臂的运动学机械手臂的运动学研究机器人手臂的位置和运动方式。
运动学分析通常包括正、逆运动学两个方面。
2.1 正运动学正运动学研究机器人手臂的运动学模型与其关节角度之间的关系。
对于n自由度的机械手臂,可以通过构建齐次变换矩阵的方法,将末端执行器的位置和姿态与关节角度联系起来。
2.2 逆运动学逆运动学研究机械手臂如何通过末端执行器的位置和姿态来确定关节角度。
逆运动学问题通常是非线性的,并且存在多解性。
通过使用几何方法、代数方法或数值方法,可以求解机械手臂的逆运动学问题。
3.机械手臂的动力学机械手臂的动力学研究机器人手臂受力和加速度之间的关系。
动力学分析可以帮助我们理解机械手臂的受力情况,为控制和优化机械手臂的运动提供基础。
3.1 机械手臂的运动方程机器人手臂的运动方程是描述手臂在特定坐标系下的加速度与外部力之间关系的方程。
通过运动方程,可以推导出机械手臂的动力学模型。
3.2 动力学优化动力学优化是基于机械手臂的动力学模型,通过优化算法来最小化手臂的能耗、提高执行效率或实现更加精确的运动。
通过对机械手臂的动力学特性进行深入分析,可以找到最佳的控制策略和参数设置。
4.机械手臂运动学与动力学的应用机器人机械手臂的运动学和动力学分析在实际应用中具有重要意义。
4.1 生产制造领域在生产制造领域,机械手臂的运动学和动力学分析可以帮助优化生产线的布局和工艺流程。
通过合理设计机械手臂的运动轨迹和力矩分配,可以实现高效率和高精度的自动化生产。
4.2 医疗卫生领域机械手臂在医疗卫生领域的应用越来越广泛,例如辅助手术机器人。
平面二自由度机械臂动力学分析[摘要] 机器臂是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。
本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。
经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。
[关键字] 平面二自由度一、介绍机器人是一个非线性的复杂动力学系统。
动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。
机器人动力学问题有两类:(1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。
这对实现机器人动态控制是相当有用的。
(2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。
也就是说,给出关节力矩向量τ,求机器人所产生的运动。
这对模拟机器人的运动是非常有用的。
二、二自由度机器臂动力学方程的推导过程机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。
机器人动力学方程的具体推导过程如下:(1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。
(2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时,F r为力矩。
(3) 求出机器人各构件的动能和势能,构造拉格朗日函数。
(4) 代入拉格朗日方程求得机器人系统的动力学方程。
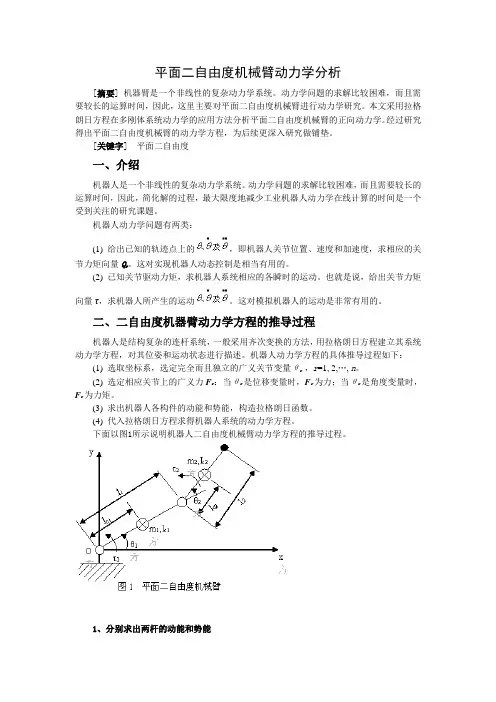
下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
1、分别求出两杆的动能和势能设θ1、θ2 是广义坐标,Q1、Q2是广义力。
两个杆的动能和势能分别为:式中,是杆1质心C1(,)的速度向量,是杆2质心C1(,)的速度向量。
它们可以根据质心C1、C2的位置方程导出2、分别求出两杆的速度、3、代入拉格朗日方程求得机械臂动力学方程根据具有完整理想约束的有N个广义坐标系统的拉格朗日方程式中q r——第r个广义坐标;E——系统动能;U——系统势能;Q r——对第r个广义坐标的广义力。
机器人手臂的运动学与控制研究第一章:引言随着制造业、汽车工业、军事、医疗等领域的不断发展,机器人技术逐渐成为了人工智能领域的热门话题。
其中,机器人手臂是机器人中最常见的机械臂,其运动学和控制研究对于机器人技术的发展至关重要。
本文旨在深入探究机器人手臂的运动学与控制研究,为读者了解机器人手臂的基本结构、运动学、控制方式以及相关发展提供帮助。
第二章:机器人手臂的基本结构机器人手臂一般由底座、臂段、关节、末端执行器等主要组成部分构成。
其中,底座固定在地面或平台上,从而支撑机器人手臂的其他部分。
臂段是机器人手臂的主体,根据实际需要可以设置多个臂段。
每个臂段之间通过关节相互连接,在关节处用驱动器驱动,实现机械臂的运动。
末端执行器通常包括夹爪、工具、传感器等,用于完成特定的任务。
第三章:机器人手臂的运动学机器人手臂的运动学是指机器人手臂在三维空间中的运动方式。
机器人手臂的运动可以分为直线运动和旋转运动两种类型。
而机器人手臂的运动则是由机器人各个关节的运动所组成的。
对于机器人手臂的运动学研究,则主要包括正运动学与逆运动学两个方面。
正运动学是指已知机器人关节的转动角度,如何确定机器人末端执行器在三维空间中的位置和方向。
反之,逆运动学是指已知机器人末端执行器在三维空间中的位置和方向,如何确定机器人各关节的转动角度。
在机器人手臂运动学模型中,通常采用DH方法来建立解析式。
第四章:机器人手臂的控制机器人手臂的控制是机器人手臂的关键技术之一。
基于运动学模型的控制方法有点动控制、反馈线性化控制、自适应控制和非线性控制四种类型。
实际中,机器人手臂通常采用PID控制,通过控制机器人手臂的关节旋转角度,实现机器人手臂的精确定位、准确抓取等任务。
同时,近些年来机器学习技术的发展,也日趋应用于机器人手臂的控制之中。
第五章:机器人手臂的发展机器人手臂的发展正向着更加灵活、高效的方向不断发展。
近年来,增材制造、双臂机器人、软体机器人等技术的出现,为机器人手臂的发展提供了新的思路。
移动机器人的力学行为与运动控制分析移动机器人是指具备移动功能的机器人,它能够自主地在各种环境中移动和执行任务。
在移动机器人的设计与控制中,力学行为和运动控制是两个关键的方面。
本文将分析移动机器人的力学行为和运动控制,并探讨其在不同应用领域中的应用。
一、力学行为分析移动机器人的力学行为主要包括运动学和动力学两个方面。
运动学研究机器人的运动状态、位置和姿态,动力学则研究机器人在运动过程中所受到的力和力矩。
1. 运动学分析运动学分析是研究机器人在空间中的位置和姿态变化规律的科学。
通过运动学分析,我们可以得到机器人的位姿矩阵、速度和加速度等信息,为运动控制提供基础。
运动学模型通常使用关节角度和关节长度来描述机器人的位置和姿态。
对于多自由度的机器人,可以使用雅可比矩阵来分析末端执行器的速度和力矩。
2. 动力学分析动力学分析研究机器人在运动过程中受到的力和力矩,以及相关参数的计算和建模。
动力学模型可以用于预测和优化机器人的动力学性能,并设计相应的运动控制策略。
动力学分析的方法主要有拉格朗日方法、牛顿-欧拉方法和Kane方法等。
通过动力学分析,我们可以计算机器人关节的扭矩需求、关节力矩和末端执行器的力和力矩。
二、运动控制分析在移动机器人的运动控制中,主要涉及到路径规划、轨迹跟踪和环境感知等方面。
运动控制的目标是使机器人能够按照预定的轨迹和位置进行精确的移动和执行任务。
1. 路径规划路径规划是指确定机器人在环境中移动的最佳路径的过程。
常用的路径规划算法有A*算法、Dijkstra算法和快速随机树(RRT)等。
通过路径规划,机器人可以避开障碍物、优化路径选择,并实现高效的移动。
2. 轨迹跟踪轨迹跟踪是指控制机器人按照预定的轨迹进行移动的过程。
常用的轨迹跟踪算法有PID控制器、模型预测控制(MPC)和状态反馈控制等。
通过轨迹跟踪,机器人可以实现精确的位置和姿态控制。
3. 环境感知环境感知是指机器人通过传感器获取周围环境信息的过程。
机械臂的运动学与动力学分析近年来,机械臂技术在工业自动化领域得到了广泛的应用,其作为一种重要的生产工具,能够完成各种复杂的任务。
然而,要想充分发挥机械臂的功能,必须对其进行深入的运动学和动力学分析。
一、机械臂的运动学分析机械臂的运动学分析旨在研究机械臂各个构件之间的位置关系和移动规律。
机械臂通常由多个关节(或称为自由度)组成,每个关节都可以实现一定范围内的运动。
关节的运动是通过驱动机构来实现的,而机械臂的末端执行器可以在三维空间内完成复杂的任务。
运动学分析中的一个重要概念是正运动学,它描述了机械臂末端执行器的位置和姿态与关节的转动角度之间的关系。
通过正运动学分析,我们可以计算出机械臂在给定关节角度下的末端位置和姿态,这对于任务规划和路径规划非常重要。
另一个重要的概念是逆运动学,它描述了机械臂末端执行器所需的位置和姿态与关节的转动角度之间的关系。
逆运动学分析是指根据末端执行器所需的位置和姿态,计算出相应的关节角度。
逆运动学解是一个多解问题,通常需要根据具体的应用来选择最优解。
二、机械臂的动力学分析机械臂的动力学分析研究的是机械臂在运动过程中所受到的力和力矩的分布情况,以及关节处的转动惯量和力矩的关系。
动力学分析对于机械臂控制和稳定性的研究具有重要意义。
在动力学分析中,一个重要的概念是牛顿-欧拉动力学方程,它描述了机械臂在运动过程中所受到的力和力矩之间的关系。
根据牛顿-欧拉动力学方程,我们可以计算出机械臂在给定的关节力矩下的加速度和角加速度,从而确定机械臂的运动状态。
另一个重要的概念是运动学约束和动力学约束。
运动学约束是指机械臂各个关节之间的几何约束关系,如末端执行器的位置和姿态与关节角度之间的关系。
动力学约束是指机械臂在运动过程中所受到的力和力矩之间的约束关系,如末端执行器所需的力和力矩与关节力矩之间的关系。
三、机械臂的应用前景随着机械臂技术的不断发展,其在工业自动化领域的应用前景越来越广泛。
机械臂在工业生产线上可以完成各种繁重、危险或精细的操作,从而提高生产效率和质量,降低劳动强度和事故风险。
龙源期刊网
四自由度模块化移动机械臂建模与运动学分析
作者:杨升吴怀宇闫贺陶辉
来源:《现代电子技术》2011年第15期
摘要:为了对模块化移动机械臂的模块化组成和控制系统建模,对受非完整约束的差分
驱动的移动平台运动学模型进行了分析。
并在考虑机械臂运动学约束的基础上,采用
法描述了四自由度模块化机械臂操作空间,获得以关节角度为变量的正运动学模型。
运用矩阵逆乘的解析法,进一步得到了机械臂逆运动学的完整解析解。
最后,在实验室平台上做了仿真与实验验证,结果证明了正运动学模型及运动学逆解的正确性。
关键词:模块化移动机械臂;正运动学;逆运动学;完整解析解
中图分类号:TN911-34 文献标识码:A 文章编号:1004-373X(2011)17-0204-04。
机械臂运动学与动力学分析研究机械臂是一种能够模拟人类手臂运动的机器装置,广泛应用于工业生产线、医疗器械、军事装备等领域。
机械臂的准确运动控制是其关键技术之一,而机械臂运动学与动力学分析则是实现准确运动控制的基础。
本论文将重点介绍机械臂运动学与动力学的研究内容和方法。
一、机械臂运动学分析机械臂运动学分析是指研究机械臂的运动规律、位姿和末端执行器位置之间的关系。
机械臂的运动学分析包括正运动学和逆运动学两个方面。
1. 机械臂正运动学分析机械臂正运动学分析是通过已知各关节位置和连杆长度等信息,计算机械臂末端执行器的位置和姿态。
最常用的方法是采用坐标转换矩阵,通过连续的旋转和平移矩阵计算机械臂的运动学正解。
该方法可以应用于多连杆机械臂的正运动学分析,具有计算简单、精度高等优点。
2. 机械臂逆运动学分析机械臂逆运动学分析是通过已知末端执行器位置和姿态,计算各关节的位置和姿态。
逆运动学问题一般存在多解或无解的情况,因此逆运动学问题的求解是一个复杂的优化问题。
常用的方法包括解析解法、数值解法和混合解法等。
解析解法适用于特定的机械结构,但对于一般机械臂来说,解析解法往往难以求得,需要采用数值解法或混合解法。
二、机械臂动力学分析机械臂动力学分析是研究机械臂的力学性能和载荷分析的过程。
机械臂动力学分析涉及到关节力矩的计算、扭矩的优化、动力学模型的建立等。
1. 机械臂关节力矩计算机械臂关节力矩是指机械臂各个关节所需的扭矩大小。
关节力矩的计算通常需要考虑机械臂的负载、摩擦、惯性等因素。
常见的计算方法包括拉格朗日动力学法、牛顿-欧拉动力学法等。
2. 机械臂扭矩优化机械臂扭矩优化是指通过调整机械臂关节力矩,使机械臂在满足运动要求的前提下,尽可能减小能耗和机械结构的疲劳损伤。
扭矩优化的方法包括最小二乘法、规划法等。
3. 机械臂动力学模型建立机械臂动力学模型是描述机械臂运动学与动力学关系的数学模型。
机械臂动力学模型可以通过拉格朗日方程、牛顿-欧拉方程等方法进行建立。
机械臂的运动学与逆运动学分析引言:机械臂是一种工业机器人,能够模拟人的手臂运动,完成各种复杂的操作。
机械臂的运动学与逆运动学是研究机械臂动作学习和控制的基础知识。
通过研究机械臂的运动学与逆运动学分析,可以确定机械臂各个关节的运动规律,实现精确的位置控制。
本文将介绍机械臂的运动学和逆运动学,并探讨其在实际应用中的意义。
一、机械臂的运动学分析机械臂的运动学研究机械臂的姿态和位置随时间的变化规律。
运动学分析主要包括三个方面:位置、速度和加速度。
1. 位置机械臂的位置可以通过关节点的坐标来描述,常用的坐标系有笛卡尔坐标系和极坐标系。
笛卡尔坐标系通过XYZ三个坐标轴描述机械臂末端的位置,而极坐标系则通过距离和角度来描述。
根据不同的控制需求和操作环境,可以选择合适的坐标系来描述机械臂的位置。
2. 速度机械臂的速度是机械臂终端各关节点的速度值。
通过推导机械臂各关节点的速度,可以得出机械臂末端的速度。
机械臂的速度是根据位置变化率来计算的,可以通过微分方法求解。
在实际应用中,机械臂的速度需要根据具体任务进行调整,以实现精确控制。
3. 加速度机械臂的加速度是机械臂终端各关节点的加速度值。
通过推导机械臂各关节点的加速度,可以得出机械臂末端的加速度。
机械臂的加速度决定了机械臂能够完成的运动速度和周期。
加速度的分析可以帮助设计者了解机械臂的动态特性,并在控制系统中进行合理的参数调节。
二、机械臂的逆运动学分析机械臂的逆运动学是指已知机械臂末端位置,求解各关节的角度,从而实现确定的位置控制。
逆运动学分析是机械臂控制设计中的重要一环。
逆运动学的求解过程有多种方法,最常见的是几何法和代数法。
几何法是基于三角函数关系进行求解的,根据机械臂构型和关节参数,可以将位置坐标转化为关节角度。
代数法则是利用向量和矩阵的运算进行求解,将机械臂的位置坐标转化为向量形式,并通过矩阵运算求解逆运动学方程组。
逆运动学的求解是机械臂控制的关键步骤,可应用于自动化装配、物料搬运和危险环境作业等领域。
机器人手臂运动学与动力学分析机器人手臂已经成为了工业领域的常见工具。
这些机器人手臂最初只是简单的工具,只能做一些简单的工作。
但是现在的机器人手臂已经非常复杂,并且还具有多种功能。
机器人手臂的运动学和动力学分析是理解它们功能的关键。
首先,让我们讨论机器人手臂的运动学分析。
运动学是研究物体运动的分支学科。
在机器人手臂中,我们需要研究它们的位姿和运动轨迹。
机器人手臂是由许多关节组成的。
这些关节可以以不同的方式移动,使机器人手臂能够在三维空间中进行运动。
机器人手臂运动学的主要目标是使机器人手臂能够移动到指定的位置和方向。
这通常是通过使用正逆运动学等计算方法来实现的。
每个关节的运动都可以表示为旋转角度或线性位移。
这些运动可以通过坐标转换来表示机器人手臂的位姿。
在机器人手臂的动力学分析中,我们需要考虑物理因素,例如力、加速度和惯性。
这些因素会影响机器人手臂的运动和性能。
如果机器人手臂需要承载较重的负载或进行快速运动,它的动力学分析将变得更加重要。
在机器人手臂的动力学分析过程中,我们需要了解它们的惯性矩、摩擦力和重量等因素,以便计算出它们的运动学参数。
机器人手臂的动力学分析是十分复杂的,需要使用数学模型和计算机模拟来实现。
除了运动学和动力学分析,“机器人手臂控制”也是机器人技术的重要部分。
机器人手臂控制可以实现机器人手臂的编程和自动化操作。
通过机器人手臂控制,我们可以实现机器人手臂的精确移动和执行各种任务的高效能力。
现代机器人手臂的控制技术不仅仅局限于编程和操作,而已经实现了复杂的自主决策功能,例如对机器人周边环境进行感知和处理,从而更好地实现面向人的智能机器人技术。
总结而言,机器人手臂运动学和动力学分析是机器人技术的基本组成部分。
它们的研究可以帮助我们了解机器人手臂的运动和性能,从而开发出更加高效和智能的机器人手臂。
虽然机器人手臂技术在工业领域大行其道,但它的潜在发展和应用仍然是无限的。
第44卷第7期2010年7月浙 江 大 学 学 报(工学版)Journal o f Zhejiang U niversit y (Eng ineer ing Science)Vol.44No.7J ul.2010收稿日期:20100425.浙江大学学报(工学版)网址:w w /eng基金项目:国家自然科学基金资助项目(60675043);浙江省科技计划资助项目(2007C21051);杭州电子科技大学科研启动基金资助项目(KYS09150543).作者简介:姜宏超(1985 ),男,吉林四平人,博士生,从事智能机器人运动规划与控制等研究.E mail:an dyylem on@通信联系人:刘士荣,男,教授,博导.E mail:lius hirong@DO I:10.3785/j.issn.1008 973X.2010.07.021六自由度模块化机械臂的逆运动学分析姜宏超1,2,刘士荣2,张波涛1,2(1.华东理工大学自动化研究所,上海200237; 2.杭州电子科技大学自动化研究所,浙江杭州310018)摘 要:针对自主研发的六自由度(DO F)模块化机械臂,提出一种逆运动学求解方法.根据机械臂的结构特点和运动学约束,对机械臂的运动学进行分析.建立该类型机械臂的正运动学模型,得到了机械臂逆运动学的完整解析解.采用Denavit H ar tenberg (D H )法对机械臂操作空间进行描述,在考虑机械臂运动学约束的基础上,得到以关节角度为变量的正运动学模型.通过分析正运动学模型的可解性,采用矩阵逆乘的解析法求解机械臂的正运动学模型,得到了该类机械臂逆运动学的完整解析解.通过仿真验证了正运动学模型及运动学逆解的正确性,运动学逆解可以用于机械臂末端执行器的精确定位和运动规划.关键词:模块化机械臂;正运动学;逆运动学;完整解析解中图分类号:T P 241 文献标志码:A 文章编号:1008973X(2010)07134807Inverse kinematics analysis for 6degree of freedom modularmanipulatorJIAN G H ong chao 1,2,LIU Shi rong 2,ZHANG Bo tao 1,2(1.I nstitute of A utomation,Eas t China Univ ers ity of Science and T echnolog y ,Shanghai 200237,China;2.I nstitute of A utomation,H angz hou D ianz i Univers ity ,H angz hou 310018,China)Abstract:An inver se kinem atics procedure w as propo sed aimed at the developed 6degree of freedom (DOF)modular manipulato r.T he kinematics of the m anipulator w as analyzed accor ding to the structur al characteristic and the kinematic constraint.A for ward kinematics m odel of the maniputor w as conducted,and the co mplete analytical solutio n of the inverse kinematics w as obtained.The Denavit H artenberg (D H )metho d w as used to describe the w orkspace of the m anipulator,resulting in the forw ard kinematics m odel w ith ang le variables under the kinem atic co nstr aint of the manipulato r.The solvability of the forw ard kinematics m odel w as analyzed.T hen the complete analytical solutio n o f the inv erse kinematics can be acquired by solving the forw ard kinem atics mo del w ith the inv erse matr ix analy sis.Simulation r esults verified the cor rectness of the forw ard kinem atics model and the inverse kinematics solutio n.T he inverse kinematics results can be further used fo r the pr ecise location o f end effector and the m otion planning.Key words:modular manipulato r;forw ard kinematics;inverse kinem atics;com plete analy tical so lution 机械臂是模仿人的手和臂设计的一种自动操作装置,用以实现对物体的抓取、搬运等任务.它能在人类无法工作的环境中,代替人的工作,以保护人身安全,并具有能长期稳定工作的特点,对提高生产效率和产品质量,实现工业生产的机械化和自动化,起到了十分重要的作用,因而广泛应用于机械制造、冶金、电子、轻工和原子能等领域.正向运动学和逆向运动学研究属于机械臂运动学研究领域中基础而关键的问题,其中,各类机械臂的逆运动学一直受到国内外机器人领域研究者的关注.目前求解机械臂逆运动学的方法主要有:迭代法、解析法和几何法[1 2].Paul等[1]提出的解析算法对后来的机器臂的逆运动学问题研究有着指导性的意义.Regnier等[3]提出一种基于迭代法和分布式的算法,能够求出多种结构的六自由度机械臂的位置逆解.Jun等[4]将工作区速度输入的控制问题转化为求解机器人逆运动学问题,提高了水下远程操作机器人系统的工作效率.Saab等[5]针对操作性和运动任务相结合的整体关节协调问题,考虑等式约束和不等式约束,利用逆运动学解决二次约束问题,从而提高机器人完成任务的可达性.Ro lland等[6]针对并联机械臂,提出基于遗传算法的优化方法,将非线性方程组求解问题转化为逐个优化的过程,建立了逆运动学模型.徐德等[7]系统地分析5自由度机械臂PArm的正运动学和逆运动学,证明了该机械臂不存在奇异性位姿问题.郑慧峰等[8]分别利用D H法和牛顿 欧拉递推法,建立超声检测臂的运动学和动力学模型.张智等[9]引入免疫遗传算法求解运动学逆解问题.周友行等[10]改进了人工智能领域的一种启发式搜索算法 爬山法,求解具有多冗余度的机械臂运动学逆解.徐文福等[11]针对自由漂浮空间机器人的笛卡尔连续路径的规划问题,提出基于速度级逆运动学方程的方法.在求解机械臂运动学逆解问题中,迭代法受到初始值选取的约束,只能求得一组解;解析法计算较为复杂,但可以得到全部根;几何法针对机械臂的某些特殊结构进行简化,再进行求解,般无法单独使用甚至根本无法使用.对于大多数机械臂而言,一般都是采用解析法求得全部封闭解,再采用其他方法选取其中一组较优的可行解.本文以自主研发的六自由度模块化机械臂M T ARM为研究对象,在分析机械臂运动特性的基础上,采用D H法[12]研究机械臂的运动学问题,建立机械臂的正运动学模型,采用矩阵逆乘的解析法求解运动学逆解问题.最后通过仿真实验,验证了所求机械臂的正运动学模型及运动学逆解的正确性.1 正运动学利用D H方法对机械臂进行分析建模已成为机械臂运动学问题研究的标准方法,基本思想为:首先,给每个关节指定一个参考坐标系;然后,确定如何实现任意2个相邻坐标系之间的变换;最后,写出机械臂的总变换矩阵.1.1 MT ARM关节坐标系的建立MT ARM是具有6个旋转关节(6R)的六自由度模块化机械臂,如图1所示.根据机械臂的结构特点,使用D H表示法确定各个旋转关节坐标系.先定义机械臂的初始位置,然后使用D H方法建立基坐标系以及各个关节坐标系.x0-z0表示机械臂基座的坐标系(基坐标系),即关节1的坐标系,依次建立关节2~6的坐标系,x6-z6表示机械臂末端执行器的坐标系,如图2.图1 六自由度模块化机械臂F ig.1 6DO F mo dularmanipulator图2 六自由度模块化机械臂坐标系F ig.2 Coordinate systems of6DOF modular manipulator1.2 MT ARM关节变换矩阵与正运动学方程建立关节坐标系之后,根据相邻关节坐标系确定关节的D H参数表.机械臂的关节运动约束与参数如表1所示.表中, 表示相邻关节坐标系之间的关节角,d表示相邻关节之间的连杆长度, a表示相邻关节之间的连杆偏移量, 表示相邻关节坐标系之间的扭转角,各个关节角均以顺时针旋转方向为正.1349第7期姜宏超,等:六自由度模块化机械臂的逆运动学分析表1 MT ARM 机械臂的D H 参数表T ab.1 D H parameter of M T AR M manipulat or 关节序号d a 1 1d 10-90(- , )2 2d 2090(- , )3 300-90(-2 /3,2 /3)4 4d 4090(- , )5 500-90(-2 /3,2 /3)66d 6(- , )相邻关节坐标系的变换矩阵为nT n +1=A n +1=R (z , n +1) T (0,0,d n +1)T (a n +1,0,0) R (x , n +1)=C n +1-S n +1cos n +1 S n +1sin n +1a n +1C n +1S n +1 C n +1cos n +1-C n +1sin n +1a n +1S n +10S n +1C n +1d n +101.(1)式中:nT n +1表示坐标系n +1相对于坐标系n 的变换,记为A n +1,R (z , n +1)和R (x , n +1)分别为绕z 轴和x 轴的基本旋转变换矩阵,T (0,0,d n +1)和T (a n +1,0,0)分别为沿z 轴和x 轴的基本平移变换矩阵.4个基本变换矩阵均为可逆矩阵,故A n +1可逆,S n +1表示sin n +1,C n +1表示co s n +1.将D H 参数代入式(1),计算相邻关节变换矩阵,得到MT ARM 的正运动学方程.机械臂的末端执行器相对于基座的总变换矩阵为T 6=A 1A 2A 3A 4A 5A 6=n xo x a x p x n y o y a y p y n z o z a z pz1.(2)式中:0T 6为机械臂末端执行器在基坐标系中的位姿矩阵,[p x p y p z ]T为机械臂末端执行器在基坐标系中的位置,[n x n y n z ]T为机械臂末端执行器坐标系的x 6轴在基坐标系中的方向矢量,[o x o y o z ]T 为机械臂末端执行器坐标系的y 6轴在基坐标系中的方向矢量,[a x a y a z ]T 为机械臂末端执行器坐标系的z 6轴在基坐标系中的方向矢量.p x =-C 1{C 2[C 3C 4S 5d 6+S 3(C 5d 6+d 4)]- S 2S 4S 5d 6}+S 1[S 3C 4S 5d 6-C 3(C 5d 6+ d 4)-d 2],p y =-S 1{C 2[C 3C 4S 5d 6+S 3(C 5d 6+d 4)]-S 2S 4S 5d 6}-C 1[S 3C 4S 5d 6-C 3(C 5d 6+ d 4)-d 2],p z =S 2[C 3C 4S 5d 6+S 3(C 5d 6+d 4)]+ C 2S 4S 5d 6+d 1,n x =C 1{C 2[C 3(C 4C 5C 6-S 4S 6)-S 3S 5C 6]- S 2(S 4C 5C 6+C 4S 6)}-S 1[S 3(C 4C 5C 6- S 4S 6)+C 3S 5C 6],n y =S 1{C 2[C 3(C 4C 5C 6-S 4S 6)-S 3S 5C 6]- S 2(S 4C 5C 6+C 4S 6)}+C 1[S 3(C 4C 5C 6- S 4S 6)+C 3S 5C 6],n z =-S 2[C 3(C 4C 5C 6-S 4S 6)-S 3S 5C 6]- C 2(S 4C 5C 6+C 4S 6),o x =-C 1{C 2[C 3(C 4C 5S 6+S 4C 6)-S 3S 5S 6]- S 2(S 4C 5S 6-C 4C 6)}+S 1[S 3(C 4C 5S 6+S 4C 6)+ C 3S 5S 6],o y =-S 1{C 2[C 3(C 4C 5S 6+S 4C 6)-S 3S 5S 6]- S 2(S 4C 5S 6-C 4C 6)}-C 1[S 3(C 4C 5S 6+S 4C 6)+ C 3S 5S 6],o z =S 2[C 3(C 4C 5S 6+S 4C 6)-S 3S 5S 6]+ C 2(S 4C 5S 6-C 4C 6),a x =-C 1[C 2(C 3C 4S 5+S 3C 5)-S 2S 4S 5]+ S 1(S 3C 4S 5-C 3C 5),a y =-S 1[C 2(C 3C 4S 5+S 3C 5)-S 2S 4S 5]- C 1(S 3C 4S 5-C 3C 5),a z =S 2(C 3C 4S 5+S 3C 5)+C 2S 4S 5.2 逆运动学求解求解逆运动学问题是已知机械臂末端执行器的坐标位置来计算机械臂各个关节的角度值,是正向运动学问题的反过程.正向运动学问题的求解相对简单且解唯一;逆向运动学问题的求解相对复杂,可能存在多解也可能无解.Pieper [13]证明了3个连续关节轴相交于一点的6R 机器人逆运动学可解.Duffy [14]证明了3个连续关节轴平行的6R 机器人逆运动学可解.MT ARM 机械臂是按照Pieper 准则设计的,可以得到最多16组逆运动学封闭解.根据机械臂的运动学正解,使用矩阵逆乘的解析法求解运动学逆解.2.1 求解关节角 1和 3使用解析法求解运动学逆解,由A -11左乘式(2),得到A -110T 6=1T 6=A 2A 3A 4A 5A 6.(3)记(i,j )L 为等式左边矩阵的第i 行第j 列元素,(i,j )R1350浙 江 大 学 学 报(工学版)第44卷为等式右边矩阵的第i行第j列元素.根据式(3)的(1,3)L=(1,3)R、(1,4)L=(1,4)R,可得a x C1+a y S1=-(C2C3C4-S2S4)S5-C2S3C5,p x C1+p y S1=[-(C2C3C4-S2S4)S5-C2S3C5]!d6-C2S3d4.(4)由式(4)可得p x C1+p y S1-[a x C1+a y S1]d6=-C2S3d4.(5)同理,根据式(3)的(2,3)L=(2,3)R、(2,4)L=(2,4)R,可以得到-a z=-(S2C3C4+C2S4)S5-S2S3C5,-p z+d1=[-(S2C3C4+C2S4)S5-S2S3C5]!d6-S2S3d4,(6) -p z+d1+a z d6=-S2S3d4.(7)同理,根据式(3)的(3,3)L=(3,3)R、(3,4)L= (3,4)R,可得-a x S1+a y C1=-S3C4S5+C3C5,-p x S1+p y C1=(-S3C4S5+C3C5)d6+C3d4+d2,(8) -p x S1+p y C1-[-a x S1+a y C1]d6-d2=C3d4.(9)记(w)2为式(w)(w=1,2,∀,n)的等式两边各自的平方,(w)2+(v)2为式(w)和式(v)(v=1,2,∀,n, w#v)的等式两边各自的平方和.由(5)2+(7)2可以得到[p x C1+p y S1-(a x C1+a y S1)d6]2+(-p z+d1+a z d6)2=(-C2S3d4)2+(-S2S3d4)2=S23d24.(10)由(9)2可得[-p x S1+p y C1-(-a x S1+a y C1)d6-d2]2=C23d24.(11)由式(10)、(11),可得[(p x-d6a x)2+(p y-d6a y)2+(-p z+d1+a z d6)2+d22-d24]/(2d2)=-(p x-d6a x)S1+(p y-d6a y)C1.(12)令k=[(p x-d6a x)2+(p y-d6a y)2+(-p z+d1+a z d6)2+d22-d24/2d2,m=p x-d6a x,n=p y-d6a y,则式(12)可以改写为k=-mS1+nC1.(13)为了求 1,引入中间变量!,令m=cos!!m2+n2,n=sin!!m2+n2,则式(13)化为sin!cos 1-cos!sin 1=k/m2+n2.利用和差公式,化为sin(!- 1)=k/m2+n2.于是,cos(!- 1)=∃1-sin(!- 1)2=∃m2+n2-k2/m2+n2,故!- 1=arctan(∃k/m2+n2-k2),1=arctan(n/m)-arctan(k/∃m2+n2-k2).(14)由式(14)可见, 1最多可以有2个解.由式(14)可以求出 1,则可由式(12)得C3=[-p x S1+p y C1-(-a x S1+a y C1)d6-d2]/d4.于是,S3=∃1-C23,故3=arctan(S3/C3).(15)由 3的求解过程可以看出,对应每个 1, 3最多可以有2个解,故 1、 3最多可以有4组解.2.2 求解关节角变量 2由A-11、A-12依次左乘式(2),A-16右乘式(2),可以得到A-12A-110T6A-16=2T5=A3A4A5.(16)根据式(16)的(3,4)L=(3,4)R,有-(a x C1S2+a y S1S2+a z C2)d6+p x C1S2+p y S1S2+p z C2-C2d1=0,(17)整理可得[(p x-a x d6)C1+(p y-a y d6)S1]S2-(-p z+a z d6+d1)C2=0,故21=arctan{(-p z+a z d6+d1)/[(p x-a x d6)C1+(p y-a y d6)S1]},22= 21+180%.(18)由式(18)可见,对应每个 1, 2最多可以有2个解,故 1、 2、 3最多可以有8组解.2.3 求解关节角变量 4、 5、 6由A-11、A-12、A-13、A-14依次左乘式(2),得到A-14A-13A-12A-110T6=2T6=A5A6.(19)根据式(19)的(3,3)L=(3,3)R,有a x(C1C2C3S4+C1S2C4-S1S3S4)+a y(S1C2C3S4+ S1S2C4+C1S3S4)+a z(-S2C3S4+C2C4)=0.(20)整理可得1351第7期姜宏超,等:六自由度模块化机械臂的逆运动学分析[a x(C1C2C3-S1S3)+a y(S1C2C3+C1S3)-a z S2C3]S4+(a x C1S2+a y S1S2+a z C2)C4=0,故41=arctan{-(a x C1S2+a y S1S2+a z C2)/[a x(C1C2C3-S1S3)+a y(S1C2C3+C1S3)-a z S2C3]},42= 41+180%.(21)由式(21)可见,对应每组 1、 2、 3,关节角 4最多可以有2个解,故 1、 2、 3、 4最多可以有16组解.根据式(19)的(1,3)L=(1,3)R,(2,3)L=(2,3)R,有a x(C1C2C3C4-C1S2S4-S1S3C4)+a y(S1C2C3C4-S1S2S4+C1S3C4)-a z(S2C3C4+C2S4)=-S5, -a x(C1C2S3+S1C3)+a y(-S1C2S3+C1C3)+a z S2S3=C5,(22)故5=arctan(S5/C5).(23)根据式(19)的(3,1)L=(3,1)R,(3,2)L=(3,2)R,有n x(C1C2C3S4+C1S2C4-S1S3S4)+n y(S1C2C3S4+ S1S2C4+C1S3S4)+n z(-S2C3S4+C2C4)=-S6, o x(C1C2C3S4+C1S2C4-S1S3S4)+o y(S1C2C3S4+ S1S2C4+C1S3S4)+o z(-S2C3S4+C2C4)=-C6,(24)故6=arctan(S6/C6).(25)对应每组 1、 2、 3、 4, 5和 6只有唯一解,所以 1、 2、 3、 4、 5、 6最多可有16组解.由于机械臂逆运动学的解不是唯一的,在实际应用中机械臂运动学逆解的选择需要根据机械臂末端执行器所在象限和具体所走的轨迹来确定.3 仿真验证为了验证M T ARM机械臂的正逆运动学模型的正确性,在移动机械臂M T ARM仿真软件上进行测试.实验分为2部分:1)正运动模型的测试;2)逆运动模型测试.该仿真实验主要用于验证各关节空间组合和末端执行器位姿的对应关系的正确性,以及关节的运动学约束.仿真平台严格按照M TARM机械臂的各模块几何关系进行设计,其中, d1=366.5mm,d2=242m m,d4=356mm, d6=280mm.图3 机械臂正运动学模型的初始位姿及末端位姿Fig.3 Init ial post of fo rw ard kinematics model and end effector po st values of manipulato r3.1 正运动学模型验证图3(a)为机械臂正运动学模型的初始位姿,即当所有关节角变量为0%时的位姿,图中x、y、z为基坐标系,z=0平面上方为机械臂本体,图3(b)为机械臂初始状态的正运动学位姿数据.图中,(x,y,z)表示机械臂末端执行器的位置数据,(a x,a y,a z)表示机械臂末端执行器的a方向矢量, 为关节角度变量, 1~ 6右侧动作条的左右箭头分别为角度的减小与增加,最右侧可以直接输入角度值.由图3(a)计算可得,y=d2+d4+d6=242+356+280= 878mm,z=d1=366.5m m,与图3(b)显示的y、z 值相同,可见分析得到的正运动学模型是正确的. 3.2 逆运动学验证逆运动学的仿真过程如下:先假定关节角 1~ 5的取值均为45%,由正运动学公式计算机械臂位姿矩阵,得到(x,y,z)=(-553.476,202.751, 812.491),(a x,a y,a z)=(-0.28,-0.073,0.957);然后根据运动学逆解公式,求解 1~ 5;最后由正运1352浙 江 大 学 学 报(工学版) 第44卷动学公式计算每组逆解的位姿数据,与原假定角度的位姿数据进行比较.图4为假定 1~ 5均取45%时机械臂的正运动学位姿数据,图5为通过求解逆运动学得到的8组逆解中其中1组(序号为8)的位姿数据.通过对比可以看出,机械臂末端执行器的2组位置数据(x,y,z )的误差很小(误差为计算时四舍五入所产生的计算误差),可见逆运动学的求解是正确可靠的.图4 1~ 5均取45%时机械臂的末端位姿F ig.4End effecto r po st values of manipulato r at ang le 45%图5 表2中第8组逆解的机械臂末端位姿Fig.5 End effector po st v alues of manipulator at 8th inver se kinematics solution set in tab.2表2中序号为0的一行数据表示假定关节角的数值以及所求得的机械臂正运动学位置数据,序号为1~8行的数据表示通过求解逆运动学得到的多组逆解及位置数据(本实验求得的16组逆解,表中只给出其中的8组可行解,另外8组不可行解已剔除).由表2可知,位置数据误差很小,求得的运动学逆解是正确可靠的.表2 运动学逆解角度及机械臂末端位置T ab.2 Ang le values o f inverse kinematics so lutio n and end effecto r posit ion of manipulato r序号 1/r ad 2/r ad 3/rad 4/rad 5/rad x /mm y /mm z /mm 00.78540.78540.78540.78540.7854-553.476202.751812.49110.78610.78620.78480.78460.7855-553.500202.753812.54920.78610.78620.7848-2.3570-0.7855-553.500202.751812.54830.7861-2.3554-0.78480.7846-0.7855-553.502202.750812.54740.7861-2.3554-0.7848-2.35700.7855-553.503202.749812.5475 1.4771-0.7862-0.7848 1.87910.8998-553.492202.742812.5566 1.4771-0.7862-0.7848-1.2625-0.8998-553.493202.741812.5557 1.4771 2.35540.7848 1.8791-0.8998-553.491202.745812.55581.47712.35540.7848-1.26250.8998-553.492202.744812.5544 结 语机械臂的运动学分析是移动机械臂轨迹规划和控制的基础.本文针对M T ARM 机械臂的运动学问题,分析机械臂的结构,采用D H 方法建立机械臂的关节坐标系,计算以关节角为变量的变换矩阵,进而获得正运动学方程,使用矩阵逆乘的解析法求解逆运动学,计算以关节角为变量的运动学逆解的解析表达式.最后通过仿真验证了运动学正解与逆解的准确性.本文为具有相似结构的机械臂提供了正、逆运动学求解方法,为机械臂的运动轨迹规划和控制研究提供了理论依据.参考文献(References):[1]P AU L R P ,SH IM A N O B E,M AY ER G.K inemat icscontr ol equations for simpl manipulator s [J ].IEEE Transactions on Systems ,Man and C ybernetics ,1981,11(6):449445.1353第7期姜宏超,等:六自由度模块化机械臂的逆运动学分析[2]FU K S,G ON ZA L EZ R C,L EE C G S.Robotics:control,sensing,vision and intelligence[M].N ewY or k: M cGr aw H ill,1987:111.[3]REGN IER S,OU EZDOU F B,BIDA UD P.Distributedmethod fo r inver es kinematies of all serial manipulator s[J].M echanism and M achine Theory,1997,32(7):855867.[4]JU N B H,SHI M H W,L EE P M,et al.Wo rkspacecontro l system of under water teleoperated manipulato rs on RO V s[C]&Proceedings of OCEANS2009EU ROPE.Piscataway,N J:IEEE,2009:1 6.[5]SAA B L,SOU ER ES P.F OU RQ U ET J Y.Couplingmanipulat ion and locomo tion tasks fo r a humanoid ro bo t[C]&Proceedings of International Conference onAdvances in Computational Tools for Engineering Appli cations.P iscataw ay,N J:IEEE,2009:8489.[6]ROL L A ND L,CH A NDR A R.Fo rw ard kinemat ics o fthe6 6g ener al pa rallel manipulator using real coded genetic alg or ithms[C]&Proceedings of IEEE/ASME International Conf erence on Advanced Intelligent Mecha tronics.Piscatawa y,N J:I EEE,2009:16371642. [7]XU D,CA LD ER ON C A A,GA N J Q,et al.A n analy sis of the inv erse kinematics fo r a5 DO F manipulator [J].International Journal of Automation and C omputing, 2005,2(2):114124.[8]郑慧峰,周晓军,张杨.基于最优时间的超声检测轨迹规划[J].浙江大学学报:工学版,2010,44(1):2933,183.ZH EN G H ui feng,ZH OU Xiao jun,ZH AN G Yang.T ime optimization based traject or y planning o f ult rasonicinspection[J].Journal of Zhejiang University:Engineer ing Science,2010,44(1):2933,183.[9]张智,朱齐丹,吴自新.基于免疫遗传算法的机械手避碰逆解[J].系统仿真学报,2007,19(3):514518.ZH A NG Zhi,Z HU Q i dan,WU Zi xin.Co llisio n fr ee inver se kinematic solut ion of maniputo r based onimmune g enetic alg or ithm[J].Journal of System Simula tion,2007,19(3):514518.[10]周友行,何清华,邓伯禄.一种改进的爬山法优化求解冗余机械手运动学逆解[J].机器人,2003,25(1):3538.ZHO U Y ou hang,H E Q ing hua,DEN G Bo lu.A namelio rative∋mountain climbing(a rithmetic to so lve inverse kinematics of redundant manipulator[J].Robot,2003,25(1):3538.[11]徐文福,刘宇,强文义,等.自由漂浮空间机器人的笛卡尔连续路径规划[J].控制与决策,2008,23(3):278282,287.XU Wen fu,LIU Y u,QIA NG Wen yi,et al.Cartesian continuous path planning for free floating space robot[J].C ontrol andD ecisio n,2008,23(3):278282,287.[12]DENAVIT J,HART ENBERG R S.A kinematic notationfo r low er pair mechanisms based on matrices[J].ASM E J ournal of Applied Mechanics,1955,77(6):215221. [13]PI EP ER D L.T he kinematics of manipulato rs undercomputer contro l[D].Califor nia:Stanford U niver sity,1968.[14]DU FF Y J.Analysis of mechanisms and robot manipulators[M].L ondon:Edw ard Ar nold,1980:369409.下期论文摘要预登基于定位器支撑的飞机大部件调姿内力研究郭志敏,蒋君侠,柯映林(浙江大学无机械与能源工程学院,浙江杭州310027)摘 要:以基于定位器支撑的飞机大部件调姿、对接系统为研究对象,建立了逆运动学及动力学模型.按照协调运动要求,分析了其冗余驱动的本质.针对定位器的定位误差会直接引起调姿内力的问题,分析了采用关节驱动力的最小范数解和改进定位器结构设计等措施以减小调姿内力,并提出一种消除调姿内力的方法,阐明了它的应用特点.实验研究表明,基于定位器支撑的飞机大部件调姿过程中由内力引起的大部件附加变形较小,不会威胁到大部件安全.此外,通过内力消除方法可以有效释放调姿内力,完全能够满足飞机数字化装配过程无应力装配的要求.关键词:三坐标定位器;调姿内力;冗余;飞机大部件1354浙 江 大 学 学 报(工学版) 第44卷。