机械设计中的约束问题
- 格式:ppt
- 大小:610.50 KB
- 文档页数:21
机械系统优化设计中的约束与优化问题在机械工程领域,优化设计是一项关键任务。
通过对机械系统进行优化,可以提高效率、减小能耗、延长使用寿命等。
然而,在进行机械系统的优化设计时,我们必须面对各种约束和优化问题。
首先,机械系统的约束可以分为两类:设计约束和工程约束。
设计约束包括机械系统的形状、尺寸、重量等方面的限制,以及与其他系统或部件的接口要求。
这些约束是设计者必须遵守的,因为它们直接关系到机械系统的可用性和实际应用。
另一方面,工程约束包括材料强度、制造成本、可维护性等因素。
这些约束是实际工程实施时需要考虑的,因为它们关系到机械系统的可靠性和经济效益。
在优化设计中,我们通常会面临多个冲突的目标。
例如,在减小机械系统的重量的同时,要确保其强度不下降;在提高机械系统的效率的同时,要保持其成本可控。
这就引入了多目标优化问题。
多目标优化问题需要寻找一个最佳的折中方案,将各个目标在不同约束条件下进行优化,以求达到最大化总体效益的目标。
为了解决这些优化问题,我们通常使用数学建模和优化方法。
对于约束问题,我们可以使用约束优化方法,如拉格朗日乘子法和KKT条件等。
这些方法通过引入拉格朗日乘子来将约束条件融入优化问题中,从而将原问题转化为一个无约束问题。
然后,我们可以使用一般的优化算法,如梯度下降、遗传算法等,来解决这个无约束问题。
此外,在实际的机械系统优化设计中,我们还会面临一些实际的限制。
例如,制造设备和制造工艺的限制,材料的可获得性等。
这些实际限制需要考虑在内,以确保设计方案的可行性和可实施性。
另一个重要问题是机械系统的不确定性。
在机械系统的设计过程中,我们通常会面临各种形式的不确定性,如设计参数的不确定性、负载的不确定性等。
这些不确定性会对设计结果产生影响,因此需要在优化设计中进行考虑。
一种常见的方法是使用鲁棒优化方法,通过考虑不确定性的范围和分布,寻找一个鲁棒的设计方案,以确保在不同的不确定条件下系统仍然能够正常工作。
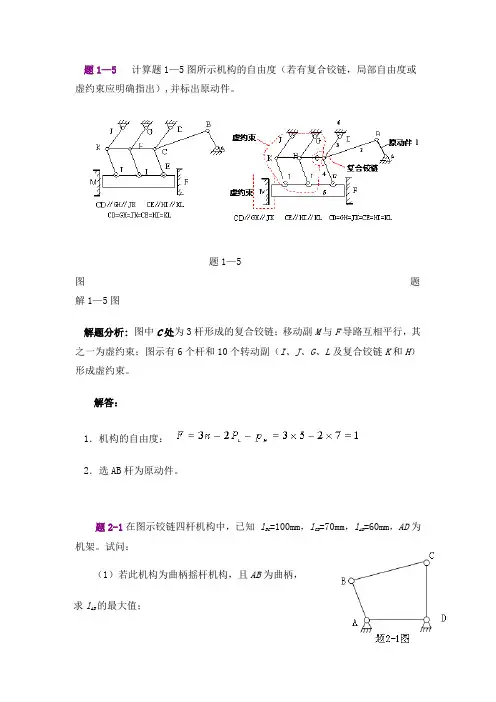
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图题解1—5图解题分析: 图中C处为3杆形成的复合铰链;移动副M与F导路互相平行,其之一为虚约束;图示有6个杆和10个转动副(I、J、G、L及复合铰链K和H)形成虚约束。
解答:1.机构的自由度:2.选AB杆为原动件。
题2-1在图示铰链四杆机构中,已知l BC=100mm,l CD=70mm,l AD=60mm,AD为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB为曲柄,求l AB的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
解题分析:根据铰链四杆机构曲柄存在条件进行计算分析。
在铰链四杆机构中,若满足杆长条件,以最短杆或最短杆相邻的杆为机架,机构则有曲柄,否则无曲柄;若不满足杆长条件,无论取哪个构件为机架,机构均为无曲柄,即为双摇杆机构。
解答:1.因为AD 为机架,AB 为曲柄,故AB 为最短杆,有AD CD BC AB l l l l +≤+,则m m30)1006070(=-+=-+≤BC AD CD AB l l l l故 mm30max =AB l2.因为AD 为机架,AB 及CD 均为曲柄,故AD 杆必为最短杆,有下列两种情况:若BC 为最长杆,则 m m100=<BC AB l l ,且AB CD BC AD l l l l +≤+,则m m90m m )7010060(=-+=-+≥CD BC AD AB l l l l得 m m 100m m 90≤≤AB l若AB 为最长杆,则m m100=>BC AB l l ,且BC CD AB AD l l l l +≤+,故m m110m m )6070100(=-+=-+≤AD CD BC AB l l l l得m m 110m m 100≤≤AB l故m m 90min =AB l3.如果机构尺寸不满足杆长条件,则机构必为双摇杆机构。
机械优化设计数学模型机械优化设计数学模型是一种用于解决机械设计问题的数学工具。
通过建立数学模型,可以对机械系统的设计进行分析、优化和预测。
在机械设计中,通过数学模型可以量化设计指标,如机械性能、成本、可靠性等,从而帮助设计师作出更好的决策。
最优化方法是机械优化设计中最常用的方法之一、最优化是寻找一个使得目标函数取得最小值或最大值的变量值的过程。
在机械设计中,目标函数通常是与设计指标相关的性能指标,如机械结构的强度、刚度、重量等。
通过最优化方法,可以找到满足设计要求的最佳设计。
约束优化方法是在设计中考虑约束条件的一种方法。
约束条件通常是与设计指标相关的限制条件,如材料的强度、尺寸的限制等。
在机械设计中,约束条件往往是不可或缺的,设计师需要在满足约束条件的前提下,尽量优化设计。
数值模拟方法是通过建立数学模型,应用数值方法进行求解的一种方法。
数值模拟方法不仅可以对机械系统的性能进行估计,还可以通过改变参数进行优化设计。
数值模拟方法在机械设计中的应用非常广泛,如有限元分析、多体动力学分析等。
除了最优化方法、约束优化方法和数值模拟方法,还有其他一些数学方法可以用于机械优化设计。
如统计学方法、灵敏度分析、优化算法等。
这些方法在机械设计中的应用可以根据具体问题进行选择和组合使用。
总之,机械优化设计数学模型是一种重要的工具,可以帮助设计师分析、优化和预测机械设计。
通过建立数学模型,并应用适当的数学方法,可以使机械系统达到更好的性能、成本和可靠性。
机械优化设计数学模型的建立和应用需要设计师具备一定的数学基础和工程经验,同时也需要合理的设计目标和约束条件,才能得到满意的设计结果。
机械设计基础问答题1.试述机械与机构、零件与构件、运动副与约束的涵义。
①零件是制造的基本单元;②某些零件固联成没有相对运动的刚性组合称为构件,构件是运动的基本单元;③构件与构件之间通过一定的相互接触与制约,构成保持相对运动的可动联接,称为运动副;④当构件用运动副联接以后,它们之间的某些相对运动将不能实现,这种对相对运动的限制称为运动副的约束;⑤能完成有用的机械功或转换机械能的机构组合系统称为机器;⑥机器与机构总称为机械。
2.何谓复合铰链、局部自由度和虚约束?①三个或三个以上的构件在同一轴线上用回转副相联接构成复合铰链;②局部自由度是指不影响机构中输入与输出关系的个别构件的独立运动(凸轮机构中的滚子——提高效率,减少磨损);③运动副引入的约束中,对机构自由度的影响与其他机构重复,这些重复的约束称为虚约束(机械中常设计带有虚约束,对运动情况虽无影响,但往往能使受力情况得到改善)。
3.机构具有确定运动的条件是什么?若不满足条件,将会出现什么情况?①运动链成为具有确定相对运动的机构的必要条件为:运动链的自由度必须大于零,主动构件数必须等于运功链的自由度;②不满足条件时,当自由度为零时,运动链将成为各构件间没有相对运动的刚性构架,当主动构件数大于自由度时,可能会折断构件,当主动构件数小于自由度时,从动件的运动不确定。
4.试述机件损伤和失效的主要形式以及机件工作准则的涵义。
①机件的主要的损伤及失效形式有:机件产生整体的或工作表面的破裂或塑性变形,弹性变形超过允许的限度,工作表面磨损、胶合和其他破环,靠摩擦力工作的机构产生打滑和松动,超过允许强度的强烈震动,等等;②主要准则:强度——机件抵抗断裂、过大的塑性变形或表面疲劳破坏的能力,刚度——机件受载时抵抗弹性变形的能力,常用产生单位变形所需的外力或外力矩来表示(提高刚度的办法:改进机件结构,增加辅助支撑或肋板以及减小支点的距离,适当增加断面尺寸)耐磨性——磨损过程中抵抗材料脱落的能力,振动稳定性——机器在工作时不能发生超过容许的振动,耐热性。

机械设计中的刚性约束问题探讨在机械设计中,刚性约束是一项重要且必不可少的考虑因素。
它不仅影响到机械结构的稳定性和耐用性,还直接关系到产品的使用寿命及其工作效果。
因此,深入研究刚性约束问题对于机械设计的优化和改进具有极其重要的意义。
刚性约束指的是在机械结构设计中,通过各种方式对部件进行约束,使其具有一定的稳定性和刚度。
这样可以减少由于工作载荷、振动等因素引起的变形和松动,确保机械系统的运行稳定性和精度。
然而,在实际设计中,刚性约束问题往往并不容易解决,需要综合考虑各种因素并进行合理的设计。
首先,刚性约束问题在机械系统中通常表现为固定部件的选择和位置布置。
正确选择和布置固定部件对于减少结构变形和振动有着重要的作用。
例如,在汽车发动机的设计中,发动机座的位置和固定方式直接关系到发动机的稳定性和工作效率。
合理的固定方式可以减少发动机运行时的振动和噪音,并延长发动机的使用寿命。
其次,材料的选择和优化也是解决刚性约束问题的关键之一。
材料的强度和刚度与机械结构的稳定性密切相关。
在设计中,需要根据不同部位的受力情况进行合理的材料选择和配比,以确保结构的刚性约束满足设计要求。
例如,在飞机机翼的设计中,航空铝合金材料的使用和优化可以减少机翼变形,提高飞机的操纵稳定性。
此外,合理的约束方式也是解决刚性约束问题的关键。
在机械设计中,各种约束方式如焊接、螺栓连接、键连接等都有其适用的场景和优劣之处。
正确选择和使用适当的约束方式,可以实现刚性约束的效果,并且能够便于拆卸和维护。
例如,在建筑钢结构中,通过焊接和螺栓连接的混合方式进行约束,可以确保结构的稳定性和刚度,并且容易进行拆卸和更换。
另外,刚性约束问题还需要考虑运动部件的设计。
在机械系统中,运动部件的刚性约束对于保持系统的精度和稳定性至关重要。
例如,在机械手臂的设计中,关节的摆动及其约束控制是一个复杂的问题。
合理的关节设计和约束方式,可以减小机械手臂的运动误差,并且提高其工作的精度和稳定性。


一、概述在工程学中,机构是指由多个构件组成的系统,构件之间通过连接点连接在一起,因此构成了一个相对独立的结构。
每个构件的自由度用来描述构件在系统中的运动和转动能力,而约束则限制了构件的运动和转动。
在研究机构的时候,构件数、约束数和机构的自由度之间存在着密切的通联。
二、构件数对机构自由度的影响1. 增加构件数会增加机构自由度当一个机构中增加了构件数时,原有的构件之间的连接点会增加,并且新增加的构件也会有自由度,因此整个系统的自由度会增加。
这也意味着系统的运动和转动能力会有所增加,因此构件数和机构的自由度是成正比的关系。
2. 减少构件数会减少机构自由度相反地,如果一个机构中减少了构件数,那么连接点会减少,整个系统的自由度也会减少。
这意味着系统的运动和转动能力会有所减少,因此构件数和机构的自由度也是成反比的关系。
三、约束数对机构自由度的影响1. 增加约束数会减少机构自由度约束可以限制构件的运动和转动,当一个机构中增加了约束数时,构件的运动和转动能力会受到限制,相当于整个系统的自由度会减少。
因此约束数和机构的自由度是成反比的关系。
2. 减少约束数会增加机构自由度相反地,如果一个机构中减少了约束数,构件的运动和转动能力会得到一定程度的放松,整个系统的自由度也会增加。
因此约束数和机构的自由度也是成正比的关系。
四、总结构件数、约束数和机构的自由度之间存在着密切的通联。
增加构件数会增加机构自由度,减少构件数会减少机构自由度;而增加约束数会减少机构自由度,减少约束数会增加机构自由度。
工程师在设计机构的时候需要充分考虑构件数和约束数对机构自由度的影响,以便使机构能够正常运行并满足设计要求。
五、实际案例分析为了更好地理解构件数、约束数与机构自由度的关系,我们可以通过一个实际的案例来进行分析。
假设我们有一个简单的机构,由三个构件组成,每个构件上都有一个连接点,连接点可以自由运动。
如果每个构件和连接点都是自由的,那么整个系统的自由度就可以表示为每个构件和连接点的自由度之和。
机械优化设计的数学模型是用于描述和求解机械系统设计问题的数学表达式或方程组。
这些模型旨在找到最优的设计参数或设计方案,以满足给定的设计目标和约束条件。
以下是机械优化设计中常用的数学模型:目标函数(Objective Function):目标函数是描述设计目标的数学表达式。
它可以是最小化或最大化某个性能指标,如成本、重量、能量消耗、刚度、强度等。
目标函数的形式取决于具体的设计问题和优化目标。
约束条件(Constraints):约束条件是限制设计参数或设计方案的数学条件。
约束条件可以包括等式约束和不等式约束,用于确保设计满足特定的要求和限制。
例如,材料强度约束、尺寸限制、运动学和动力学要求等。
设计变量(Design Variables):设计变量是需要优化的参数或变量。
它们可以是连续的、离散的或混合的。
设计变量包括几何参数(如长度、宽度、高度)、材料属性(如弹性模量、密度)、工艺参数等。
约束函数(Constraint Functions):约束函数是描述约束条件的数学表达式。
它们用于限制设计变量的取值范围,确保设计满足特定的约束要求。
约束函数可以是等式约束或不等式约束。
优化算法(Optimization Algorithm):优化算法是用于求解优化问题的数学方法和算法。
常用的优化算法包括梯度下降法、遗传算法、粒子群优化算法、模拟退火算法等。
这些算法基于目标函数和约束条件,搜索最优的设计变量组合。
机械优化设计的数学模型可以采用不同的数学方法和工具进行建模和求解,以获得最优的设计方案。
在实际应用中,根据具体的设计问题和要求,需要选择合适的数学模型和优化算法来进行机械系统的优化设计。
solidworks油缸行程伸缩约束全文共四篇示例,供读者参考第一篇示例:Solidworks是一款非常流行的三维建模软件,广泛应用于机械工程、汽车设计、航空航天等领域。
在使用Solidworks进行建模设计时,经常会遇到各种约束的问题。
今天我们就来讨论一下Solidworks中如何约束油缸的行程伸缩。
油缸是一种常见的液压传动装置,主要由缸体、活塞、活塞杆、密封件等部件组成。
在实际应用中,油缸常常需要进行行程的伸缩,以完成各种机械工作。
在Solidworks中,我们可以通过不同的方法来约束油缸的行程伸缩,以达到设计要求。
我们需要在Solidworks中建立油缸的模型。
一般来说,油缸的模型可以分为缸体、活塞和活塞杆三部分。
在建立油缸模型时,需要注意各部件之间的尺寸关系和结构布局,以确保模型的合理性和准确性。
建立好油缸模型后,接下来就是约束油缸的行程伸缩。
在实际设计中,油缸的行程伸缩通常是由液压缸内的液压油压力产生的。
在Solidworks中,我们可以通过添加液压缸组件来模拟油缸的行程伸缩过程。
我们需要将液压缸组件放置在油缸模型内部,并通过约束的方法使其与油缸模型相连接。
在Solidworks中,约束通常包括固定约束、距离约束、角度约束等。
对于油缸的行程伸缩,我们可以通过添加距离约束来约束活塞杆的行程长度,以模拟油缸的伸缩过程。
在添加距禿约束时,需要确保活塞杆在液压缸内部的运动轨迹是符合设计要求的,并且不会与其他部件发生碰撞或干涉。
Solidworks是一款功能强大的三维建模软件,可以帮助我们快速、准确地设计和模拟各种机械装置。
在约束油缸的行程伸缩过程中,我们需要注意模型的准确性和合理性,以确保设计的有效性和可靠性。
希望以上内容对大家有所帮助,谢谢!第二篇示例:SolidWorks是一款功能强大的三维计算机辅助设计软件,广泛应用于机械行业中。
在SolidWorks中,我们可以轻松地对各种工程设计进行建模、分析和制造。
关于机械限制的确定机械限制是指机械系统在运动过程中受到的各种限制条件,这些限制条件会影响机械系统的设计、运行和性能。
在机械工程中,了解和确定机械限制非常重要,因为它们直接影响着机械系统的可靠性、效率和安全性。
本文将围绕机械限制的确定展开讨论。
机械限制可以分为几个方面。
一个机械系统的运动范围受到空间限制的影响,例如机器人的工作空间受到机器人臂长和关节旋转范围的限制。
此外,机械系统的运动速度和加速度也受到限制,这取决于机械系统的动力学特性,如质量、惯性和摩擦等。
另外,机械系统的运动精度也是一个重要的限制因素,它取决于机械系统的结构刚度、精度和传动装置的特性。
在确定机械限制时,首先需要考虑机械系统的设计要求和使用环境。
设计要求是指机械系统在使用过程中需要满足的性能指标,例如运动范围、速度、精度和负载能力等。
使用环境是指机械系统所处的物理环境条件,例如温度、湿度、振动和尘埃等。
了解设计要求和使用环境是确定机械限制的基础。
机械限制还与机械系统的结构和材料有关。
不同的结构和材料会对机械系统的性能和限制条件产生影响。
例如,在机器人的设计中,选择合适的关节数和关节类型可以增加机器人的工作空间和灵活性。
另外,机械系统的材料选择也会影响机械系统的刚度、重量和耐用性等方面。
确定机械限制的关键在于对机械系统进行建模和分析。
建模是指将机械系统抽象成数学模型,用来描述机械系统的结构和运动特性。
分析是指利用数学方法和计算工具对机械系统的模型进行分析,以确定机械限制。
常用的建模和分析方法包括力学分析、动力学分析、有限元分析和优化设计等。
在建模和分析过程中,需要考虑机械系统的各种约束条件。
约束条件是指机械系统在运动过程中必须满足的条件,例如运动范围、速度、加速度和精度等。
约束条件可以通过数学方程或不等式来表示,然后通过求解方程或不等式组来确定机械限制。
在求解过程中,需要考虑约束条件之间的相互影响和优化目标,以找到满足约束条件的最优解。