用叠加法求挠度与转角
- 格式:doc
- 大小:293.00 KB
- 文档页数:7
![叠加法求梁的挠度和转角_工程力学_[共2页]](https://uimg.taocdn.com/e78e61df763231126fdb1112.webp)
平面弯曲内力 134 第8章 由于y ″的正负号与弯矩的正负号相同,如图8-23所示,所以上式右端应取正号,即
()
M x y E I ′′= (8.31)
上式称为挠曲线近似微分方程。
对于静定梁,弯矩可由截面法求得。
于是,求等截面直梁
的变形问题归结为求解一个二阶常微分方程。
图8-23 曲率与弯矩正负号的关系
8.6.3 积分法求梁的挠度和转角
对与等截面直梁,EI 为常量,式(8.31)可改写成
()EIy M x ′′= (8.32) 积分一次可得转角方程
()d EI EIy M x x C θ′==+∫ (8.33) 再积分一次可得挠度方程
()d d EIy M x x x Cx D =++∫∫ (8.34)
上式中的C 、D 为积分常数,可利用梁的边界条件和连续性条件确定。
8.6.4 叠加法求梁的挠度和转角
在弯曲变形很小,且材料服从胡克定律的情况下,挠曲线微分方程是线性的。
又因在很小变形前提下,计算弯矩时,用梁变形前的位置,结果弯矩与载荷的关系也是线性的。
这样梁在几个力共同作用下产生的变形(或支座反力、弯矩)将等于各个力单独作用时产生的变形(或支座反力、弯矩)的代数和。
8.7 梁的刚度计算
在工程实际中,对弯曲构件的刚度要求,就是要求其最大挠度或转角不得超过某一规定的限度,即。
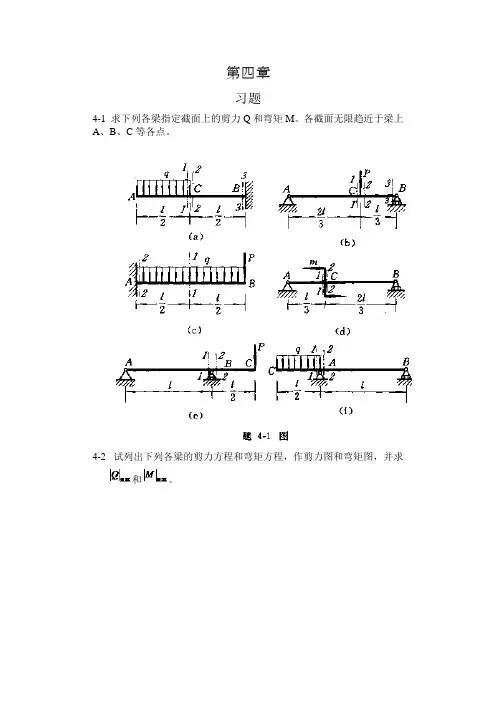
第四章习题4-1 求下列各梁指定截面上的剪力Q和弯矩M。
各截面无限趋近于梁上A、B、C等各点。
4-2 试列出下列各梁的剪力方程和弯矩方程,作剪力图和弯矩图,并求和。
4-3 用叠加法作以下各梁的弯矩图。
并求出。
4-4 用剪力、弯矩和分布载荷集度之间的微分关系校核前面已画的剪力图和弯矩图是否正确。
4-5 不列剪力方程和弯矩方程,作以下各梁的剪力图和弯矩图,并求出和。
4-6 用合适的方法作下列各梁的剪力图和弯矩图。
4-7 试根据载荷、剪力图和弯矩图之间的关系,检查下列各梁的剪力图和弯矩图是否正确,并对错误之处加以改正。
4-8 作下列构件的内力图。
4-9 在梁上行走的小车二轮的轮压均为P ,如图所示。
问小车行至何位置时梁内的弯矩最大?最大弯矩值是多少?设小车的轮距为c,大梁的跨度为。
参考答案4-1 解:题(b)(1)求支反力(见图)由,l-P l=0 =由,(2)剪力按计算剪力的规则(3)弯矩按计算弯矩的规则其它各题的答案:(a)(c)(d)(e)(f)4-2 解:题c(1)剪力和弯矩方程以左端A为原点,任一截面距左端的距离为x(图)\剪力方程:弯矩方程:(2 )剪力图与弯矩图按上述剪力方程和弯矩方程绘剪力图和弯矩图(3)与值由及得=200N =950题(f)(1)求支反力(见图)由,600-1004040=0=由,q4020-60=0=校核:+=2667+1333=4000N=q40=10040 所以支反力计算正确(2)剪力和弯矩方程以左端为原点,任一截面距左端的距离为x,则得剪力方程:弯矩方程(2)剪力图和弯矩图按上述剪力及弯矩方程绘出图及所示的剪力图和弯矩图所示剪力图和弯矩图.图中最大弯矩的截面位置可由,即剪力的条件求得Q(x)=3333-100x=0x=33.3cm(4)及由及得=2667N ,=355其他各题的答案:(a)=ql =(b)(d)(e)(g)(h)(i)(j)4-3 解:题c分别作、q单独作用时的弯矩图(图、),然后将此二图叠加得总的弯矩图。
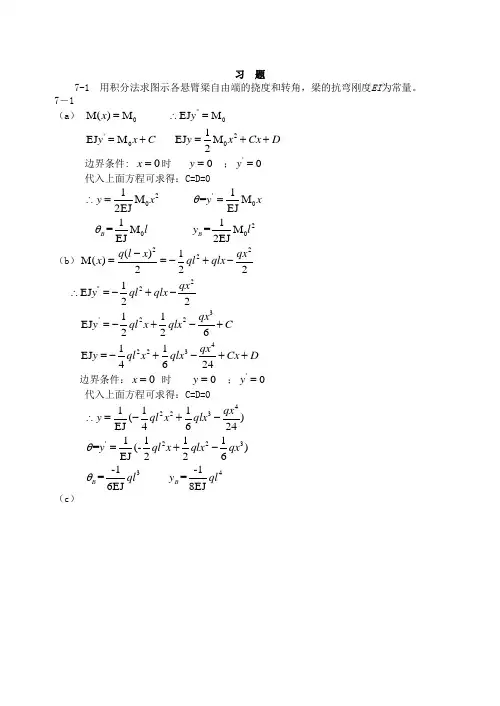
习 题7-1 用积分法求图示各悬臂梁自由端的挠度和转角,梁的抗弯刚度EI 为常量。
7-1(a ) 0M()M x = ''0EJ M y ∴='0EJ M y x C =+ 201EJ M 2y x Cx D =++ 边界条件: 0x =时 0y = ;'0y = 代入上面方程可求得:C=D=0201M 2EJ y x ∴='01=M EJ y x θ= 01=M EJ B l θ 201=M 2EJ B y l(b )222()1M()222q l x qx x ql qlx -==-+- 2''21EJ 22qx y ql qlx ∴=-+-3'2211EJ 226qx y ql x qlx C =-+-+422311EJ 4624qx y ql x qlx Cx D =-+-++边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=04223111()EJ 4624qx y ql x qlx ∴=-+-'2231111=(-)EJ 226y ql x qlx qx θ=+-3-1=6EJ B ql θ 4-1=8EJB y ql(c )()()()()()0303''04'050()1()()286EJ 6EJ 24EJ 120l xq x q lq l x M x q x l x l x l q y l x l q y l x Cl q y l x Cx Dl-=-⎛⎫=--=-- ⎪⎝⎭∴=-=--+=-++ 边界条件:0x = 时 0y = ;'0y = 代入上面方程可求得:4024q l C l -= 50120q l D l =()455000232230120EJ 24EJ 120EJ(10105)120EJq q l q l y l x x l l l q x l l lx x l ∴=---+-=-+- 3024EJ B q l θ=- 4030EJB q l y =-(d)'''223()EJ 1EJ 211EJ 26M x Pa Pxy Pa Pxy Pax Px C y Pax Px Cx D=-=-=-+=-++ 边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=023'232321112611253262B C C B y Pax Px EJy Pax Px EJ Pa Pa Pay y a a EJ EJ EJPa EJθθθ⎛⎫∴=-⎪⎝⎭⎛⎫==-⎪⎝⎭=+=+==(e)()()()21222''1'211231113()02()2223EJ 231EJ ()2231EJ ()46a M x q qax x a q M x a x a x a a y q qaxa y qa x x C a y qa x x C x D =-+≤≤=--≤≤=-+=-++=--+++ 边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C=D=0()()()22118492024EJ 12EJ qax qax y a x a x x a ∴=--=--≤≤''2223'222242232221EJ ((2)4)21EJ (42)2312EJ (2)2312y q a ax x x y q a x ax C x y q a x ax C x D =--+=--++=---+++边界条件:x a = 时 12y y = ;12θθ=代入上面方程可求得:2296a C = 4224qa D =-()()43223421612838464162384q y x ax a x a a a x a EJ-=-+-+≤≤ 43412476B B qa y EJqa EJθ=-=-(f)()()221222''212'231122341115()20225()2225251EJ 22251EJ 26511EJ 4324qa qx M x qax x a qa qa a M x qax x a x a a y q ax x a y q x ax x C a y q x ax x C x D =-+-≤≤⎛⎫=-+--≤≤ ⎪⎝⎭⎛⎫=--+ ⎪⎝⎭⎛⎫=--++ ⎪⎝⎭⎛⎫=--+++ ⎪⎝⎭边界条件:0x = 时 0y = ;'0y =代入上面方程可求得:C 1=D 1=0''22'2222223222EJ (2)1EJ (2)21EJ ()6y q a ax y q a x ax C y q a x ax C x D =--=--+=---++ 边界条件:x a = 时 12y y = ; ''''12y y =3296a C =- 4224a D =-437124136B B qa y EJqa EJθ=-=-7-2 用积分法求图示各梁的挠曲线方程,端截面转角θA 和θB ,跨度中点的挠度和最大挠度,梁的抗弯刚度EI 为常量。
科学技术创新2018.06梁的挠度和转角问题分析王爽焦之森(齐齐哈尔大学建筑与土木工程学院,黑龙江齐齐哈尔161000)对简支梁、外伸梁的变形问题的解析计算方法有很多种,常见的有积分法[1-5]、能量法[1-5]、叠加法[1-5]、奇异函数法[1-5]和共轭梁法[1-5]等,在用积分法求解简支梁、外伸梁的变形问题时须求解多个积分常数,计算繁琐;奇异函数法仍属于积分法,求解过程也须解积分常数;如果仅计算某一截面的位移,能量法较为简单,不过仍须进行积分计算[6]。
本文通过间接叠加法,来介绍简支梁、外伸梁等结构在受载荷作用时挠度及转角问题的简单求解方法,即将简支梁、外伸梁等结构在受载荷作用时挠度及转角问题,转化为有初始转角的悬臂梁受载荷时的变形问题,使简支梁、外伸梁等结构在受载荷作用时挠度及转角问题的求解过程的思维难度得到很大程度的降低,从而问题变得更容易理解。
1原理介绍与例题分析悬臂梁具有一个固定端,当悬臂梁受已经与水平线外荷载作用时,靠近固定端的载面不发生转动,转角为零。
如果有一个悬臂梁,在未荷载时,形成一个小的角度θB ,如图1所示。
图1有初始转角的悬臂梁x 轴为水平方向,梁轴线与x 轴成角θB ,即θB 为初始转角,此梁称为有初始转角的悬臂梁。
在未受荷载时,相对于x 轴,自由端已经有一挠度为θB l 。
根据叠加法,当加一静荷载F 时,自由端的挠度ω=θB l+Fl 33EI 转角为θB +Fl22EI。
应用初始转角悬臂梁概念,只要知道悬臂梁在集中力偶、集中力和均布载荷作用下自由端的挠度和转角公式,就可以通过叠加法,求解简支梁、外伸梁、的变形问题。
跨长l ,刚度EI 的悬臂梁在集中力偶Me ,集中力F ,均布荷载q 作用下,自由端的挠度和转角公式列出如下Mel 22EI ,Mel EI ,Fl 33EI,Fl 23EI ,ql 48EI ,ql 36EI。
下面举几个例子。
例1.如图例2-1所示简支梁端受集中力偶Me 作用,求端截面转角。
弯曲变形基本概念题一、选择题1.梁的受力情况如图所示,该梁变形后的挠曲线如图()所示(图中挠曲线的虚线部分表示直线,实线部分表示曲线)。
2. 如图所示悬臂梁,若分别采用两种坐标系,则由积分法求得的挠度和转角的正负号为()。
题2图题1图A.两组结果的正负号完全一致B.两组结果的正负号完全相反C.挠度的正负号相反,转角正负号一致D.挠度正负号一致,转角的正负号相反3.已知挠曲线方程y = q0x(l3 - 3lx2 +2 x3)∕(48EI),如图所示,则两端点的约束可能为下列约束中的()。
题3图4. 等截面梁如图所示,若用积分法求解梁的转角、挠度,则以下结论中()是错误的。
A.该梁应分为AB、BC两段进行积分B.挠度积分表达式中,会出现4个积分常数-26-题4图 题5图 C .积分常数由边界条件和连续条件来确定D .边界条件和连续条件表达式为x = 0,y = 0;x = l ,0==右左y y ,0='y 5. 用积分法计算图所示梁的位移,边界条件和连续条件为( )A .x = 0,y = 0;x = a + l ,y = 0;x = a ,右左y y =,右左y y '=' B .x = 0,y = 0;x = a + l ,0='y ;x = a ,右左y y =,右左y y '=' C .x = 0,y = 0;x = a + l ,y = 0,0='y ;x = a ,右左y y =D .x = 0,y = 0;x = a + l ,y = 0,0='y ;x = a ,右左y y '=' 6. 材料相同的悬臂梁I 、Ⅱ,所受荷载及截面尺寸如图所示。
关于它们的最大挠度有如下结论,正确的是( )。
A . I 梁最大挠度是Ⅱ梁的41倍 B .I 梁最大挠度是Ⅱ梁的21倍 C . I 梁最大挠度与Ⅱ梁的相等 D .I 梁最大挠度是Ⅱ梁的2倍题6图 题7图 7. 如图所示等截面梁,用叠加法求得外伸端C 截面的挠度为( )。
叠加法求挠度和转角公式表叠加法是一种用于求解复杂结构挠度和转角的常用方法。
它基于结构受力的叠加原理,将结构的不同组成部分的受力和变形效应分解为简单结构的受力和变形效应,然后通过叠加各部分的受力和变形效应来获得整体结构的受力和变形效应。
以下是常见的几种叠加法求解挠度和转角的公式表。
1.梁的叠加法公式:梁是最简单的结构之一,其挠度和转角的计算比较容易。
常用的梁的叠加法公式有两种:a.常用叠加法公式:若梁由m段相同的子梁组成,每段子梁的长度为l,弹性模量为E,截面惯性矩为I,承受的集中力为P,则整体梁的挠度可以通过以下公式计算:δ=(P*L^3)/(3*E*I)b.斜杆叠加法公式:若梁由m段相同的斜杆组成,每段斜杆的长度为l,弹性模量为E,截面面积为A,承受的集中力为P,则整体梁的挠度可以通过以下公式计算:δ=(P*L)/(E*A)2.杆件叠加法公式:杆件是一种受拉或受压的结构,常见于桥梁和塔等工程中。
常用的杆件叠加法公式有两种:a.拉杆叠加法公式:若拉杆由m段相同的子拉杆组成,每段子拉杆的长度为l,弹性模量为E,横截面积为A,承受的集中力为P,则整体拉杆的伸长量可以通过以下公式计算:Δ=(P*L)/(A*E)b.压杆叠加法公式:若压杆由m段相同的子压杆组成,每段子压杆的长度为l,弹性模量为E,横截面积为A,承受的集中力为P,则整体压杆的压缩量可以通过以下公式计算:Δ=-(P*L)/(A*E)3.板的叠加法公式:板是一种在两个方向上都受力的结构,常见于屋顶和地板等建筑中。
常用的板的叠加法公式有两种:a.弯曲叠加法公式:若板由m段相同的子板组成,每段子板的长度为l,弹性模量为E,截面惯性矩为I,承受的集中载荷为q,则整体板的挠度可以通过以下公式计算:δ=(q*L^4)/(185*E*I)b.剪切叠加法公式:若板由m段相同的子板组成,每段子板的长度为l,弹性模量为E,截面形状系数为k,承受的集中剪力为V,则整体板的转角可以通过以下公式计算:θ=(V*L^3)/(3*E*I*k)需要注意的是,上述公式都是基于一些理想化假设得出的近似解,实际工程中可能还需要考虑其他因素,如材料的非线性特性、结构的非均匀性等。
当材料在线弹性范围内工作时,梁的挠度、转角均与载荷成线性关系.而且弯曲变形是很小的.因此,当梁上同时作用几种载荷时,任一载荷引起的变形,不会受到其他载荷的影响,即每种载荷对弯曲变形的影响是各自独立的。
所以,几种载荷同时作用下梁的挠度和转角,等于各种载荷单独作用下挠度和转角的代数和,这就是求解弯曲变形的叠加法.当只需确定某些指定截面的挠度和转角时,应用叠加法是比较方便的.下面举例说明.
例7-3 图7-8 所示简支梁,承受均布载荷q 和集中力偶M0作用,已知M0 =ql2。
试求跨度中点的挠度f c 和 A 截面的转角θA。
解:利用叠加法求解时,首先将q , M0同时作用下的简支梁( 图7 -8a ) ,分解为q 作用下的简支梁( 图7-8b) 和M0作用下的简支梁( 图7 -8c ) ,然后,由表7.1 查取结果叠加。
从表的第9 栏查得均布载荷q 作用下的中点挠度和A 端面转角分别为
由表7.1 第5 栏查得集中力偶M0作用下的中点挠度和A 端面转角分别为
叠加以上结果,求得q , M0 同时作用下的中点挠度和A 截面转角为
f c为负值,表示挠度向下.θA为负值,表示A 截面顺时针转动.
例7-4 简支梁如图7 — 10a 所示,在2a 的长度上对称地作用有均布载荷q. 试求梁中点挠度和梁端面的转角.
解:利用叠加法求解。
由于简支梁上的载荷对跨度中点C 对称,故C 截面的转角应为零.因而从C 截面取出梁的一半,可将其简化为悬臂梁,如图7 — 10b 所示。
梁上作用有均布载荷q 和支座B 的反力R B = qa.这样,悬臂梁上B 端面的挠度在数值上等于原梁中点C 的挠度,但符号相反,B 端面的转角即为原梁B 端面的转角.经这样处理后,应用叠加原理求解比较方便.
由表7 · 1 的第 2 栏查得,当集中力R B (=qa) 作用时( 图7 — 10c ) ,B 端面的转角和挠度分别为
由表7 · 1 的第 4 栏查得,当均布载荷q 作用时( 图7 — 10d) ,E 截面的转角和挠度分别为
由于EB 梁段上无载荷作用,所以q 引起 B 点的转角和挠度分别为
=
=
叠加上述结果,可得B 端面的转角和挠度分别为
于是,原梁( 图7 — 10a ) 中点C 的挠度f c为
例7-6 某一变截面外伸梁如图7 — 11a 所示.AB 、BC 段的抗弯刚度分别为EI1和EI2,在C 端面处受集中力P 作用,求 C 端面的挠度和转角.
解:由于外伸梁是变截面的,故不能直接应用表7 .1 中的结果.为此,必须将外伸梁分为AB 、BC 两段来研究.首先假设梁的外伸段BC 是刚性的,研究由于简支梁AB 的变形所引起的 C 截面的挠度和转角.然后,再考虑由于外伸段BC 的变形所引起的 C 截面的挠度和转角.最后将其两部分叠加,得C 截面的实际变形.
由于假设BC 段为刚性,故可将P 力向简支梁AB 的 B 端简化,得P 和Pa .P 力可由B 支座的反力平衡,不会引起简支梁的弯曲变形。
集中力偶Pa 引起 B 截面的转角( 图7 — 11 b) 由表6 . 1 查得
它引起C 截面的转角和挠度分别为
在考虑BC 段的变形时,可将其看作悬臂梁( 图7 — 11c ) ,由表6 · 1 查得,在P 力作用下C 截面的转角和挠角分别为
将图7 — 11b 、c 中的变形叠加后,求得C 端面实际的转角和挠度分别为
例7-7 在悬臂梁AB 上作用线性分布载荷,如图7-12 所示.试求自由端B 点的挠度.
解:本例同样可以应用叠加法求解.将图中dx 微段上载荷qdx 看作集中力,查表7 · 1 的第3 栏求得微段载荷qdx 作用下自由端B 截面的挠度为
(1)
根据题意,线性分布载荷的表达式为
(2)
按照叠加原理,自由端B 点的挠度应为df B的积分.将(2) 式代入(1) 式,积分得
f B为负号,表示方向向下.。