双足步行机器人的下肢机构自由度分析
- 格式:pdf
- 大小:146.95 KB
- 文档页数:2
双足仿生机器人行走机构设计
双足仿生机器人行走机构设计一般包括以下几个关键部分:
1. 足底结构:足底结构是机器人与地面接触的部分,需要具备良好的稳定性和抓地力。
一般采用橡胶材料制作,设计有凹凸纹路或者类似动物脚掌的结构,以增加摩擦力和抓地力。
2. 关节设计:双足仿生机器人的每个腿部都需要多个关节来实现自由运动。
关节设计需要考虑到机器人的稳定性和灵活性,一般采用电机驱动的旋转关节或者液压/气动驱动的线性关节。
3. 动力系统:机器人行走需要动力系统提供能量。
一般采用电池或者电源供电,驱动关节的电机需要具备足够的扭矩和速度来实现机器人的行走。
4. 传感器:为了实现机器人的平衡和姿态控制,需要配备各种传感器。
例如,陀螺仪和加速度计可以用来检测机器人的倾斜角度,力传感器可以用来感知地面反作用力,视觉传感器可以用来感知周围环境。
5. 控制系统:双足仿生机器人的行走需要一个高效的控制系统。
控制系统可以根据传感器的反馈信息,实时调整关节的运动,以保持机器人的平衡和稳定。
总体来说,双足仿生机器人行走机构设计需要考虑到稳定性、灵活性、能量效率和控制系统的要求。
具体的设计方案需要根据机器人的应用场景和需求来确定。
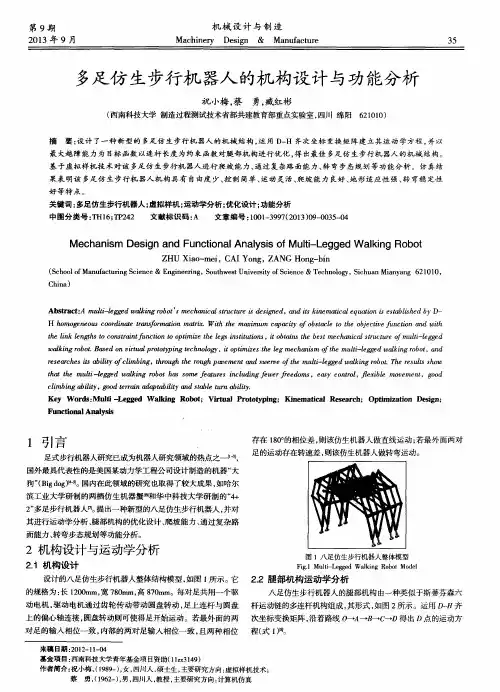
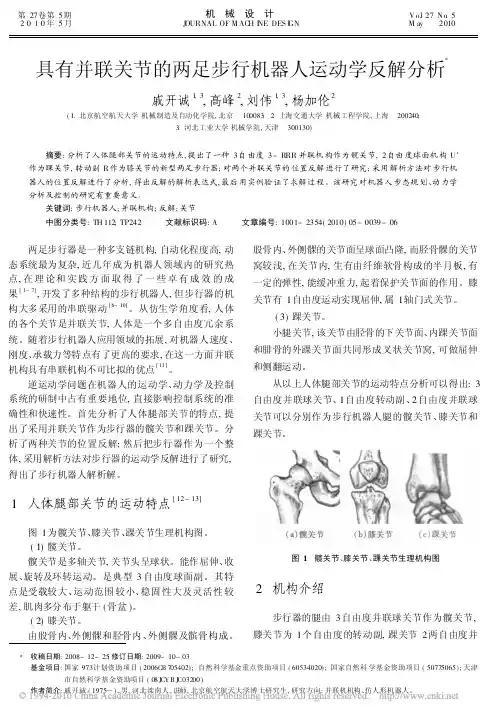
双足步行机器人直线行走步态规划及关节轨迹研究张蔓;高宇博;邓佳玉;张晶;任欢【摘要】对教学用双足机器人物理样机进行步态规划,运用仿生学方法,参考人类稳态步行特点,规划出一个步行周期内机器人直线行走过程中各个阶段重心移动的规律,建立双足机器人局部坐标系,确定一个步态周期中摆动腿关节运动初始条件,采用多项式插值算法规划出机器人摆动腿部踝关节和髋关节轨迹.%Gait planning for the physical prototype of teaching-type biped robots is developed,and with a bionics method,with reference to the characteristics of human steady-state walking,the law of gravity movement at each stage in the robot straight-line walking process within a walking cycle is planned,the local coordinate system of biped robots is established,the initial conditions for swinging movement of leg joints within a gait cycle are determined and a polynomial interpolation algorithm is used to plan the trajectory of robot swinging leg ankle joints and hip joints.【期刊名称】《林业机械与木工设备》【年(卷),期】2017(045)006【总页数】4页(P35-37,52)【关键词】双足机器人;直线行走;步态;关节轨迹【作者】张蔓;高宇博;邓佳玉;张晶;任欢【作者单位】哈尔滨石油学院,黑龙江哈尔滨 150028;哈尔滨石油学院,黑龙江哈尔滨 150028;哈尔滨石油学院,黑龙江哈尔滨 150028;哈尔滨石油学院,黑龙江哈尔滨 150028;哈尔滨石油学院,黑龙江哈尔滨 150028【正文语种】中文【中图分类】TP242机器人的研究水平在一定程度上代表了一个国家的综合科技水平,机器人能替代人类完成各种危险、精确的工作。
摘要双足步行机器人控制及其相关技术研究,在机器人研究领域中有着重要的理论研究价值,并且相关研究成果与现实社会联系紧密,有着不可忽视的现实意义,因此一直都是机器人研究的热点之一。
双足步行机器人类人地直立行走,其有着良好的自由度、动作灵活、自如、稳定,能够适合各种不同的操作环境,是机械、电子、信息、光检测为一体的集合。
双足步行机器人能突显出科技水平个性化,在行业中的影响力,可提高服务水平,担当导游、服务、咨询、信息查询等角色。
这不仅仅是一个服务问题和节省人力的问题,更重要的是她可以提供各种全面特殊的服务,一人可在不同的场合充当不同的角色,可以自动识别行走过程中碰到的障碍物,并做语音提示。
双足步行机器人从小型、灵活、功能全面、可操作性好、稳定等方面考虑,从实际可使用性而设计的全新的一款智能型机器人。
关键词:双足步行机器人、语音、步行、测距、避障目录1.设计背景 (1)2. 设计要求及概述 (2)3.方案确定 (4)3.1总体方案确定及构建 (4)3.2 结构方案确定 (4)3.3 关节驱动方案确定 (7)3.4 语音模块方案确定 (7)3.5 传感器方案确定 (8)3.6 单片机选型 (9)4.功能实现方案 (9)4. 1 功能一的实现 (10)4. 2 功能二的实现 (11)5. 机器人硬件构造 (12)5.1机械方面设计及运动分析规划 (12)5. 1.1 结构及机构设计 (12)5. 1.2 自由度(关节)设计分配 (13)5. 1.3 步态规划 (14)5. 2 电子、信息方面设计及应用 (16)5. 2 .1 单片机选型及PCB设计 (16)5. 2 .1.1 单片机选型 (16)5. 2 .1.2 语音模块电路设计 (17)5. 2 .1.3 msp430f149供电及舵机控制电路设计 (17)5. 2 .2 舵机选用 (19)5. 2 .3 语音模块应用 (20)5. 2 .4 传感器选用 (22)6. 机器人软件设计 (24)6.1 舵机控制程序设计 (24)6.2 语音模块SPI通信程序设计 (27)6.3 红外传感器应用程序设计 (30)7. 整机调试 (30)7.1功能一实现程序设计 (30)结论及尚存在的问题 (31)致谢 (32)参考文献 (33)小型双足步行机器人姓名:唐历君、王洁龙、黄桂冰、汤敏艺、许土趁学号: 2005334124、2005334102 、2006334225、2006334207、2006334208班级: 05机电一班、06机电二班1.设计背景随着我国的不断发展壮大,国家GDP不断增长,经济发展到一定程度国家经济模式必定转型,我国有的城市已经开始向第三产业服务性行业转变,为了突显出科技水平个性化,在行业中的影响力,增加消费者的兴趣,提高了服务水平,而这些机器人正可以做到,此机器人美观实用,它会出现在奥运场馆、运动员住所、高级宾馆、饭店、旅游景点等,代替人接待客人,担当导游、服务、咨询、信息查询等角色。
双足行走机器人知识点双足行走机器人,作为一种仿生机器人,不仅能够模拟人类的行走方式,还具备了一定的平衡和稳定性。
它的出现使得机器人在不同地形和环境下能够更加灵活地进行移动,具备了更强的适应性和应用潜力。
本文将从多个方面介绍双足行走机器人的知识点,让我们一步一步地了解它。
第一步,了解双足行走机器人的基本结构。
双足行走机器人通常由两个机械臂、两条机械腿、一个机械骨盆和一个控制系统组成。
机械臂用于稳定机器人的身体,机械腿用于行走和平衡,机械骨盆连接机械臂和机械腿,并提供了稳定性。
控制系统则负责控制机器人的动作和行为。
第二步,了解双足行走机器人的行走原理。
双足行走机器人通过模拟人类步态来实现行走。
它的行走原理主要包括步态生成、力学模型和控制算法。
步态生成是指根据机器人的身体结构和环境信息生成机器人的行走步态,力学模型是指通过计算机模拟机器人在行走过程中的力学特性,控制算法是指根据机器人的状态和环境信息,通过控制机械腿的运动来实现稳定的行走。
第三步,了解双足行走机器人的稳定性控制。
双足行走机器人在行走过程中需要保持平衡和稳定,否则容易倒地。
稳定性控制是指通过控制机器人的中心重心位置和机械腿的运动,使机器人保持平衡和稳定。
常用的稳定性控制方法包括模型预测控制、反馈控制和前馈控制等。
第四步,了解双足行走机器人的应用领域。
双足行走机器人具备了更灵活的移动能力,因此在许多领域都有着广泛的应用前景。
例如,在救援任务中,双足行走机器人可以在狭窄的空间中进行搜救;在工业生产中,双足行走机器人可以实现自动化装配和搬运;在军事领域,双足行走机器人可以用于侦察和携带重物等。
第五步,了解双足行走机器人的发展趋势。
随着科技的不断进步,双足行走机器人将会有更多的应用和发展。
未来的双足行走机器人可能会拥有更强的智能化和自主性,能够更加灵活地适应不同的环境和任务。
同时,双足行走机器人还有望与其他技术进行融合,例如视觉识别技术和语音交互技术等,进一步提高机器人的功能和性能。
双足步行机器人纵向关节规划陈娜;卢威【摘要】采用离线法,对关节运动进行规划.通过多次实验观察,以及对机器人相对稳定的行走姿态分析,最后确定出从起步到止步5s时间步行阶段的各步态.【期刊名称】《机械工程师》【年(卷),期】2012(000)010【总页数】2页(P25-26)【关键词】离线法;关节规划;步态分析;步行【作者】陈娜;卢威【作者单位】张家界航空职业技术学院,河北张家界427000;张家界航空职业技术学院,河北张家界427000【正文语种】中文【中图分类】TP2421 机器人行走姿态人类在行走的时候,其行走过程步态可划分为两个阶段:活动腿从支撑腿的后方摆动到支撑腿的前方;机器人的重心从上一步的支撑腿移动到下一步支撑腿。
整个行走过程是连续的过程,所以ZMP 点从支撑腿的脚掌面上开始。
首先支撑腿的小腿和大腿与竖直轴的夹角减小,髋关节位置上提,同时摆动腿的大腿和小腿与竖直轴的夹角增大,摆动腿的脚掌离地同时向前摆动。
经过一段时间,摆动腿落地,单脚支撑阶段结束,进入双脚支撑阶段,ZMP 点仍落在原支撑脚上。
再经过一段时间,机器人的ZMP 点从原支撑脚后脚掌转移到原活动腿前脚掌,原活动腿变为支撑腿,机器人完成一步。
然后整个过程为另一条腿再重复一遍。
如图1,双足机器人腿部分布了十二个关节自由度,每条腿各有六个自由度,分别为:踝关节上纵向和横向两个自由度;膝关节上一个纵向自由度,髋关节上分布三个自由度:纵向、横向及转弯自由度。
图1 结构示意图2 行走步态设计为了步态规划能够顺利进行,将行走步态设计为5 个阶段:双腿支撑,重心右移(先是右腿支撑)、左腿抬起,左腿放下、重心移到双腿中间,重心左移、右腿抬起,右腿放下、重心移到双腿间。
在摆动腿向前摆动阶段,身体的重心从两腿中间移到支撑腿上,要完成这个摆动动作,先要向支撑腿一侧扭动身体来移动重心,为了防止在侧扭时身体向摆动腿一侧倾倒,步态设计中将纵向和横向分步规划。
双足机器人运动控制系统设计I. 引言双足机器人是一种特殊的机器人,其结构设计和控制方法相对比较复杂。
为了实现双足机器人在不同地形上稳定地行走和完成各种任务,需要一个完善的运动控制系统。
本文将介绍双足机器人运动控制系统的设计。
II. 双足机器人结构设计双足机器人的结构设计主要包括身体结构和腿部结构两部分。
1. 身体结构双足机器人的身体结构一般是由上下两部分组成。
上部分通常包括头部、脖子、躯干、手臂等组成,下部分则是由两条腿和脚组成。
2. 腿部结构双足机器人的腿部结构通常是由腿部骨架、电机、传感器和连杆等组成。
电机主要用于控制腿的运动,传感器可以检测腿的状态,通过控制电机来保持机器人的平衡。
同时,为了保证机器人在不同地形上的行走稳定性,腿部结构也采用了复杂的设计。
III. 双足机器人运动控制系统概述双足机器人的运动控制系统主要包括以下部分:运动规划、状态估计、运动控制和安全保护。
1. 运动规划双足机器人的运动规划是指如何规划机器人的运动轨迹。
对于双足机器人这种高自由度的机器人来说,运动规划就显得尤为重要。
一个好的运动规划方案可以让机器人更加高效地完成各种动作和任务,同时可以防止机器人在运动时出现干扰和失衡情况。
常见的运动规划方法包括轨迹生成法、优化方法和模型预测控制法等。
2. 状态估计状态估计是指通过传感器检测机器人当前状态,并对其状态进行估计。
状态估计是双足机器人运动控制系统中的一个重要环节,其主要作用是为后面的运动控制提供状态信息。
状态估计的常见方法包括视觉传感器、陀螺仪、加速度传感器和力传感器等。
3. 运动控制运动控制是指在双足机器人的运动过程中,通过运动控制算法和控制器来控制机器人。
运动控制主要包括关节控制、力控制和位置控制等。
关节控制是指通过控制机器人各个关节的转动角度来控制机器人的运动。
力控制是指通过传感器检测机器人受力情况,通过控制机器人的力来控制其行走。
位置控制是指通过控制机器人的姿态和位置来控制运动。
双足仿生机器人行走机构设计1. 引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。
本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。
2. 设计原理双足仿生机器人的行走机构设计基于人类步行的原理。
人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。
在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。
机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。
3. 结构设计双足仿生机器人的行走机构包括传感模块、控制模块和执行模块。
传感模块用于感知机器人身体姿态和环境信息,如倾斜角、步长和地面状态等。
控制模块根据传感器信号和预设的步态参数计算关节的运动轨迹和力矩控制信号。
执行模块根据控制模块的指令,控制各关节运动,实现机器人的步行。
具体的结构设计包括:3.1 关节设计双足仿生机器人的关节设计需要考虑力矩传输、运动范围和结构强度等因素。
一般采用电机驱动的关节设计,通过控制电机的转动角度和力矩,实现机器人的步行动作。
3.2 脚底设计机器人的脚底设计需要考虑地面的摩擦力、稳定性和抗震性等因素。
一般采用具有摩擦力的材料作为脚底,例如橡胶或塑料材料。
同时,在脚底设计中还可以添加传感器,用于感知地面的状态和表面特征。
3.3 稳定性设计双足仿生机器人的稳定性设计是保证机器人能够在不倒地的情况下行走。
稳定性设计包括重心的控制、姿态的调节和动态平衡控制等。
通过控制机器人的关节运动和重心转移,使机器人能够保持平衡并行走。
4. 控制方法双足仿生机器人的行走机构控制方法包括开环控制和闭环控制两种。
4.1 开环控制开环控制是指根据预设的步态参数,通过控制各关节的运动轨迹和力矩,实现机器人的步行。
开环控制简单但稳定性较差,容易受到外界干扰影响。
4.2 闭环控制闭环控制是根据传感器信号和控制模块的反馈信息,实时调整关节的运动轨迹和力矩,以实现更加稳定的步行。
双足仿生机器人行走机构设计双足仿生机器人行走机构的设计需要综合考虑机械结构、控制系统和传感器等多个方面。
下面是一个较为常见的双足仿生机器人行走机构设计的概述:1. 机械结构:双足仿生机器人的机械结构通常由两个对称的机械腿组成,每个机械腿由多个关节连接而成。
关节可以采用电机驱动,例如直线电机或旋转电机。
关节的设计需要考虑到机器人的运动范围、力矩需求以及稳定性等因素。
2. 步态规划:双足仿生机器人的步态规划是指确定机器人腿部关节的运动轨迹和步伐。
一种常见的步态是通过将机器人的步伐分为支撑相和摆动相来实现。
在支撑相,机器人的一只腿着地支撑身体重量;在摆动相,机器人的另一只腿离地向前摆动。
步态规划需要考虑到机器人的稳定性、能耗和速度等因素。
3. 动力学模型:为了实现双足仿生机器人的稳定行走,需要建立机器人的动力学模型。
动力学模型可以通过运动学和力学方程来描述机器人的运动和受力情况。
这些模型可以用于控制系统设计和运动规划。
4. 控制系统:双足仿生机器人的控制系统需要实时监测机器人的姿态、关节角度和力矩等信息,并根据预定的步态规划来控制机器人的运动。
控制系统通常包括传感器、控制算法和执行器。
传感器可以包括惯性测量单元(IMU)、压力传感器和视觉传感器等,用于获取机器人的状态信息。
控制算法可以根据传感器数据实时计算出控制指令,例如关节角度和力矩。
执行器则将控制指令转化为机械运动。
5. 传感器:双足仿生机器人的传感器可以用于感知环境和监测机器人状态。
例如,视觉传感器可以用于识别障碍物和地面形状,压力传感器可以用于检测脚底的接触力,IMU可以用于测量机器人的加速度和角速度等。
这些传感器可以提供给控制系统有关机器人周围环境和自身状态的信息,以便实现更精确的控制和导航。
以上是双足仿生机器人行走机构设计的一般概述,具体的设计还需要根据具体应用需求和机器人的尺寸、负载和预期性能等因素进行进一步详细设计和优化。
双足行走机器人知识点总结双足行走机器人是一种能够模仿人类行走方式的机器人,它可以通过仿生学原理实现平稳的步态,并且能够在复杂的环境中移动。
下面将从构造、控制和应用三个方面对双足行走机器人的知识点进行总结。
一、构造 1. 动力系统:双足行走机器人通常采用电动机作为动力源,通过驱动机械结构实现腿部的运动。
电动机可以是直流电机、步进电机或伺服电机等。
2.传感器系统:为了实现双足行走机器人的平稳步态,需要搭载各种传感器来感知环境和机器人自身状态。
常见的传感器包括惯性测量单元(IMU)、力/力矩传感器、视觉传感器等。
3. 机械结构:双足行走机器人的机械结构需要具备轻量化、稳定性和可靠性等特点。
通常采用碳纤维复合材料或铝合金作为骨架材料,通过关节和连接件组装起来。
二、控制 1. 步态规划:双足行走机器人的步态规划是控制系统的关键。
通过分析人类行走的动作和力学原理,可以设计出适合机器人的步态,如倒立摆步态、骨骼模型步态等。
2. 动力学控制:在保持稳定的同时,双足行走机器人需要根据环境和任务要求实时调整步态。
动力学控制算法可以根据传感器数据实时计算机器人的运动轨迹和力矩分配,以保持平衡。
3. 路径规划:在复杂环境中移动时,双足行走机器人需要进行路径规划来避开障碍物。
路径规划算法可以根据传感器数据和机器人模型计算出最优的行走路径,并生成相应的控制指令。
三、应用 1. 服务机器人:双足行走机器人可以应用于服务行业,如餐厅、医院等场所的服务员机器人,能够快速、准确地完成送餐、导航等任务。
2. 救援机器人:双足行走机器人可以在灾难现场进行搜救工作,通过穿越复杂的地形和障碍物,寻找受困人员并提供帮助。
3. 科学研究:双足行走机器人可以用于科学研究领域,如人类运动学研究、人体工程学等,通过模拟人类行走模式,深入研究人类行为和生理特性。
总结:双足行走机器人是一种模仿人类行走方式的机器人,具有广泛的应用前景。
它的构造需要采用合适的动力系统、传感器系统和机械结构。
双足机器人制作及其步态运行首先,在双足机器人的制作过程中,机械设计是一个重要的环节。
双足机器人需要设计适合人体行走的腿部结构,通常采用三自由度的设计,即腿部可以在水平方向上摆动、伸缩和旋转。
此外,机械设计还需要考虑到双足机器人的稳定性和承重能力,以确保机器人在行走时不会失去平衡。
其次,控制系统是双足机器人制作中不可或缺的一部分。
控制系统需要将运动指令转化为机械运动,使机器人能够按照设定的步态进行行走。
控制系统通常包括传感器、执行器和控制算法等多个组件。
传感器主要用于获取机器人当前的状态和环境信息,比如陀螺仪和加速度计可以用来检测机器人的倾斜角度和加速度;执行器则用于实现机器人的运动,比如电机可以驱动腿部关节的运动;控制算法则负责解析传感器的数据并控制执行器的运动。
最后,双足机器人的步态运行是整个制作过程中最具挑战性的一部分。
步态运行可以分为静态步态和动态步态两种。
静态步态是指机器人在行走过程中,保持至少有三只腿支撑在地面上,而剩余的腿则处于摆动中;动态步态则是指机器人在行走过程中,每一步都会有腿从摆动态转化为支撑态。
步态运行的关键在于如何控制机器人的稳定性和步幅,以确保机器人在行走时不会失去平衡。
为了实现双足机器人的步态运行,需要通过控制算法来对机器人的运动进行优化。
控制算法可以根据传感器获取的数据来调整机器人的姿态和步频,以保持机器人的稳定性和步幅。
常用的控制算法包括PID控制、模糊控制和强化学习等,这些算法通过对机器人的运动进行建模和优化,可以使机器人在行走时更加稳定和高效。
总的来说,双足机器人的制作和步态运行是一个综合性的任务,需要涉及到机械、控制和算法等多个领域的知识。
只有在这些领域的相互配合下,才能够制作出一个稳定、灵活的双足机器人,并使其能够模仿人类的行走方式。
随着科技的不断发展,双足机器人的制作和步态运行将会变得更加成熟和先进,为人类带来更多的便利和可能性。
两足行走机器人行走部分的设计两足行走机器人是一种仿人行走的机器人,它具有两只类似于人的腿部结构,可以模拟人类的行走动作。
设计一个有效的两足行走机器人行走部分需考虑以下几个方面:机器人的腿部结构、稳定性控制、行走模式选择和步态规划。
首先,机器人的腿部结构是两足行走机器人的核心组成部分。
腿部结构的设计决定了机器人行走的稳定性和自由度。
一个常见的设计是采用类似于人体的骨骼结构,包括大腿、小腿和脚。
每个腿部都通过关节连接,类似于人体的膝关节和踝关节。
关节可以采用电机控制,通过旋转关节来调整机器人的姿态和步态。
其次,稳定性控制是保证机器人行走稳定的重要因素。
机器人行走时会产生惯性力和外界力矩,稳定性控制可以通过传感器和控制算法来维持机器人的平衡。
传感器可以用来检测机器人的姿态,如倾斜角度和加速度。
控制算法则可以根据传感器的反馈信息,计算合适的关节角度和力矩,以保持机器人的平衡。
再次,行走模式选择是两足行走机器人的重要设计要素。
机器人可以选择不同的行走模式,如直线行走、踱步、跑步等。
每种行走模式都有各自的步态和关节运动方式。
选择合适的行走模式可以提高机器人的行走效率和稳定性。
行走模式的选择可以通过控制算法和输入信号来实现,比如输入一定的速度和方向信号,控制算法会选择合适的行走模式。
最后,步态规划是决定机器人腿部运动轨迹和关节运动方式的关键因素。
步态规划可以分为离散式和连续式两种方式。
离散式步态规划将机器人的行走过程分成多个步骤,在每个步骤中计算合适的关节角度和力矩,控制机器人行走。
连续式步态规划则通过数学模型和优化算法来计算机器人的关节角度和力矩,使机器人的行走过程更加连续和流畅。
综上所述,设计一个有效的两足行走机器人行走部分需要考虑机器人的腿部结构、稳定性控制、行走模式选择和步态规划等方面。
这些设计决策将直接影响机器人的行走效率和稳定性。
通过合理的设计和控制算法,可以使机器人实现类似于人类的行走动作,达到更高的行走性能和功能。