雷达底座转台设计
- 格式:docx
- 大小:509.32 KB
- 文档页数:7

摘要三轴雷达仿真转台是三轴转台的一种,本次设计的三轴雷达仿真转台主要用于某型机载雷达的测试。
转台性能的优劣直接关系到仿真和测试试验的可靠性,是保证某型机载雷达的精度和性能的基础。
本文针对三轴雷达仿真转台的机械结构设计进行了详细的讨论,并进行了理论论证及必要的计算,同时对本转台中使用到的测量元件及联轴器等其他原件的结构及原理作了简单的介绍,设计中采用铸铝合金作为台体的材料,实现了低转速、高精度的要求,并且减轻了整体的重量,使机构在满足:转角范围、速度范围、最大角加速度等设计参数要求的前提下,使结构设计尽量优化。
本设计紧紧围绕着设计任务书中的各项指标,从内环开始至外环一步一步地展开设计。
本文主要内容包括转台的总体结构论证、转台的详细结构设计、转台的误差分析等。
结合转台设计的特点,本文重点讨论了转台机械结构的设计思想及设计过程。
关键词:三轴仿真转台;机载雷达;测量元件;联轴器:内环:中环:外环。
ABSTRACTThree shafts radar simulation turntable is one type of the three shafts turntable . The three shafts radar simulation turntable in this design is mainly used to test a certain type of airborne radar. The simulation turntable has great influence on the reliability and credence of experimentation,so the precision accuracy of a certain type of airborne radar is based on simulation turntable.This paper discusses detailedly the design of mechanical structure of the three shafts radar simulation turntable . Then uses the principle to demonstrate it and do the necessary calculation . At the same time, introduce the principle and structure of measurement components and clutch and other components used in the turntable in brief . This design closely revolves around every targets in design assignment,and spreads out from inner frame to outer frame step by step. The chief content of this paper involves the demonstration of the general structure , the design of the detailed structure and the analysis of error of the turntable. Combining the designing character of the turntable ,this paper emphatically discusses the idea and the process in designing the turntable.Key words:;Three Axis simulation turntable;Airborne radar;Measuring element;Coupling;Inner ring;Central;Outer ring目录摘要 (1)第1章绪论 (5)1.1课题背景 (5)1.2.1 智能扫描机械台的发展状况 (5)1.2.2 国内智能扫描机械台的发展状况 (7)1.2.3 未来转台的发展趋势 (8)1.3 立题的目的和意义 (8)1.4 本文主要工作 (8)第2章智能扫描机械台总体设计 (9)2.2总体设计流程 (9)2.3转台类型的确定 (9)2.4转台运动功能设计 (10)2.4.1 工作原理 (10)2.4.2 运动功能方案 (10)2.5转台总体布局设计 (10)2.6转台主要参数设计 (11)第3章智能扫描机械台机械结构详细设计 (12)3.1转台内环结构设计 (12)3.1.1 结构设计 (12)3.1.2 转矩计算 (13)3.1.3轴向固定方式的选择 (14)3.1.4轴的最小直径的确定 (15)3.1.5轴承的选择 (15)3.1.6轴承的固定与密封 (15)3.1.7内框轴与负载盘的联接方式 (16)3.1.8 主要零件刚度校核 (17)3.1.9 电机转矩的校核 (18)3.2转台中环结构设计 (19)3.2.1 结构设计 (19)3.2.2 转矩计算 (20)3.2.3 电机转矩校核 (21)3.3转台外环结构设计 (21)3.3.1 结构设计 (21)3.3.2 转矩计算 (21)3.3.3 电机转矩校核 (23)3.4机械转角限位装置设计 (23)第4章误差分析 (26)4.1回转精度分析 (26)4.1.1 滚动轴系回转精度 (26)4.1.2 俯仰轴系回转精度 (26)4.1.3 方位轴系回转精度 (27)4.2三轴相交度分析 (27)4.2.1 滚动轴与俯仰轴的相交度 (27)4.2.2 俯仰轴与方位轴的相交度 (28)第5章测量及其它元件简介 (29)5.1直流无刷电机 (29)5.2感应同步器 (30)5.3绝对式光电码盘 (30)5.4钢丝滚道轴承 (31)5.5胀紧式联轴器 (32)结论 (33)参考文献 (34)致谢 (33)第1章绪论1.1 课题背景远古时代,人类的祖先面对着充满神秘色彩的天空,编织出许多美丽、动人的神话、传说故事。

第8期2018年4月No.8April,2018无论在和平时代,在本国国土领域内,获取可疑活动目标信息,保障领土领空领海安全;还是在战争时期,获知敌情,进行火力打击,搜索雷达装备是必不可少的国防利器。
相对于地面雷达系统,机载搜索雷达具有灵活机动、快速进出战场等优势,其作用越来越明显。
然而恶劣的使用环境也限制了机载搜索雷达的发展。
针对机载雷达所处的复杂热环境、力学环境以及电磁环境,本文在有限的空间和重量下,通过合理布局、润滑密封设计、力学仿真分析设计出满足要求的伺服转台。
以下就雷达伺服转台结构设计、驱动力矩计算、力学仿真分析进行详细论述。
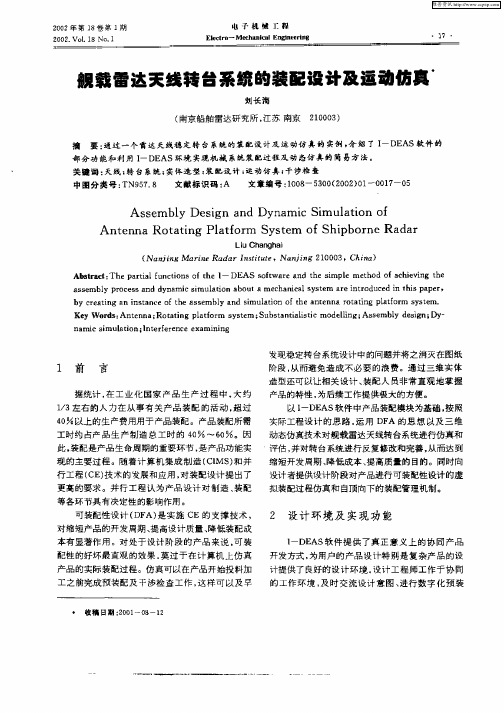
1 伺服转台结构组成伺服转台主要包括外壳及底座、方位机构、方位驱动机构和角度反馈单元[1-2]。
如图1所示,方位机构主要包括外壳及底座、直流减速电机、回转支撑、编码器等几部分。
外壳和底座是整个伺服系统的基础,支承天线重量和环境引起的力学载荷,要有足够的刚强度,并且重量和尺寸要最小[3-4]。
图1 伺服转台结构2 方位结构设计2.1 方位驱动机构回转支撑结合齿轮和轴承功能,具有轴向尺寸小、承载力大、抗倾覆能力强、结构简单等特点,本着“轴向空间和重量最小化”原则,采用带外齿的回转支撑和小齿轮作为整个方位驱动机构,回转支承采用脂润滑,如图2所示。
为保证强度和刚度,齿轮及回转支撑采用40CrMo;为了轻量化设计,固定外壳等使用高强度铝合金7075。
图2 方位驱动结构转台整体受径向尺寸限制,在确定电机输出功率、扭矩、转速等条件下,同级别电机减速机轴向尺寸较大,易形成悬臂梁问题。
为减小机载振动对电机输出稳定性的影响,除在减速机输出端进行固定外,在电机中段位置安装两个半月型卡箍,将其固连于法兰盘上,一方面加强电机减速机安装稳定性,一方面可以将电机工作产生的热量传递至外壳上,起到冷却作用,如图3所示。
图3 电机固定方式2.2 角度反馈单元角度反馈单元采用绝对式编码器,内圈转动,外圈固作者简介:何文杰(1989—),男,安徽无为人,工程师,博士;研究方向:雷达机电传动结构设计。

某型号舰载三坐标雷达方位转台的设计周晨龙;余涛【摘要】本文根据某型号舰载三坐标雷达结构的设计要求,对雷达方位转台结构进行了设计、分析,对传动部分进行了载荷计算及电机、减速机的选型,最后利用ANSYS-workbench有限元分析软件对方位转台的主要结构件进行了力学仿真分析.【期刊名称】《火控雷达技术》【年(卷),期】2017(046)001【总页数】4页(P60-63)【关键词】方位转台;结构设计;ANSYS-workbench【作者】周晨龙;余涛【作者单位】中国电子科技集团公司第二十研究所西安710068;中国电子科技集团公司第二十研究所西安710068【正文语种】中文【中图分类】TN95三坐标雷达因其能测量目标的三维位置参数(仰角/高度、方位、距离),对空中目标的探测有着明显的优势,且便于与武器系统配合对空中目标进行打击,已成为替代两坐标雷达成为舰载雷达发展的主流趋势。
方位转台是某三坐标雷达系统重要组成部分,主要功能是天线的支撑和定向装置,通过控制系统,使天线能够按照预定的规律或者跟随目标运动,准确地指向目标;并且通过它精确地测出目标的方位。
同时,方位转台作为主要受力机构,承受着来自天线等的自重和转台转动过程中的冲击载荷。
本文着重从满足系统性能、技术指标和力学性能等方面展开分析、设计和仿真等工作。
1)转台承受的载荷天线重量:443kg2)天线方位工作要求a)30±1rpm匀速连续转动b)15±0.5rpm匀速连续转动3)最大角加速度:0.21 rad/s24)方位转台重量:≤350kg5)连续工作时间:≥24h6)环境适应要求在满足GJB403A-98《舰载雷达通用规范》标准的前提下,着重考虑风载荷。
风载荷:相对风速45m/s能正常工作,相对风速为60m/s时不损坏。
根据三坐标雷达对方位转台的上述性能及指标要求,同时考虑到方位转台对雷达整机的工作精度、制造成本、制造周期、可维修性以及可靠性等要求,经过分析、初步设计、仿真验证、再设计等多次优化,最终确定出方位转台总体结构,其结构如图1所示。

雷达底座转台设计1.设计任务雷达底座转台设计:一个回转自由度,如下图1.1所示。
图1.1承载能力:500kg被测件最大尺寸:台面跳动:0.02mm台面平面度:0.02mm台面布置T型槽,便于安装负载方位转角范围:具有机械限位和锁紧机构角度位置测量精度:角度位置测量重复性:角速范围:2.设计流程根据机电产品现代设计方法,其设计流程大致如下图2.1所示。
设计流程图2.1根据上图所示,整个设计过程可分为四个阶段:功能设计、总体方案设计、详细设计和设计。
功能设计部分,是在结合所给出的重要性的要求及用户可能的功能目标需求的前提下,对转台的功能进行定义分析,将每一个功能细化为一个个的功能元,利用QFD图对实现各种功能的所对应的技术的相对重要性进行分析,相对重要性较高的功能技术便是设计的重点所在。
总体方案设计部分,通过利用SysML语言来明确各部分之间的功能参数和参数约束关系,并完成草图的设计。
详细设计部分,需要使得零件实现其预定的功能,并保证其精度和强度的设计要求。
在详细设计阶段主要是利用cad等三维建模软件,完成系统的3D图,并生产对应的2D图,完成整个设计。
对于重要的零部件需要利用有限元软件进行仿真分析,保证其可靠性。
最后还需要应用动力学和运动学仿真软件进行相关的动力学和运动学分析,确定设计系统满足功能目标要求。
设计总结部分,是对整个设计过程进行反思和总结,考虑整个设计过程中存在的不足和所运用的相关知识。
3.QFD需求-功能-技术分析QFD(全称Qualification Function Deployment),是用来对所设计的系统进行总体设计规划的工具。
QFD主要功能是能够实现工程设计与消费者或用户需求之间的紧密连接,根据消费者需求和用户目标实现对设计过程的实时修改和控制,把用户的功能目标在整个设计过程中得以体现,并根据需求的重要性对整个系统做出相应的设计规划,有重点的进行设计。
本设计根据用户对于雷达底座转台的功能重要性的需求,首先给出其需求和功能之间的联系,如下图3.1所示的质量屋,屋顶为系统的功能,包括驱动元件的转速、体积、重量,及传动元件和传感器的可靠性等,左侧围用户对于系统的功能目标的需求,由用户直接给出的功能,如角度位置测量精度:、角度位置测量重复性:、角速范围:等和用户潜在的功能需求,如人机交互、成本、节能等方面的需求组成。
高精度激光雷达转台结构设计与装配方法摘要:转台是一种高精度的设备,是惯导测试与标定系统、雷达伺服控制系统和通信望远镜控制系统的关键组成部分,其性能直接影响控制系统的控制性能指标。
而先进的控制方法是实现转台精确位置控制的重要途径。
因此,针对高精度转台控制方法的研究对国防事业和经济民生的发展有着十分重要的理论意义和工程应用价值。
关键词:高精度;激光雷达;转台结构设计;装配方法前言在雷达伺服系统中,转台是雷达的结构和功能实现中最重要的一部分。
转台机构的制造工艺及控制器的设计水平决定了雷达整体的精度、可靠性以及制作成本和研发周期。
而不同的应用环境也对转台的性能提出了不同的要求,星载雷达在太空易受到空间碎片碰撞及带电粒子辐射,因此需要其具有较高的容错性及复杂环境适应能力。
转台对惯性导航与制导系统、雷达伺服系统、量子通信望远镜等的性能测试、实验研究都有重要作用,转台的精度会决定被测系统的精度和实验研究结果。
随着惯性元件精度的提高以及许多设备对伺服控制系统的性能要求越来越严苛,转台的精度也必须随之提高,如果想得到更高精度的转台,就必须从单轴转台的研究入手,而先进的、智能化的控制策略是转台系统精确性的重要保证,所以在我国开展转台位置控制方法的研究有极其重要的意义。
1激光雷达概述激光雷达是以激光为载频,通过发射调光信号,再对从目标反射回来的信号解调来获取所需目标信息的雷达。
与微波雷达相比,激光雷达在分辨率和抗电磁干扰等方面具有明显优势,不仅测距、测角和测速精度高,而且具有高分辨率三维成像能力,其性能特点和功能优势决定了它在军民品中的重要地位和作用。
作为卫星的有效载荷,星载激光雷达转台设计制造难度极大,其结构设计对设备能否经受卫星发射过程中恶劣的力学环境及太空环境中各种因素的影响,能否保证激光雷达正常工作至关重要。
2高精度激光雷达伺服转台设计要求激光雷达用双轴转台主要用于仪器样机激光雷达主要机械台体结构;球坐标测量系统提供角度测量值;实现出射激光的空间定位和扫描。
无人艇载三轴雷达转台结构设计分析摘要:随着我国科学和技术的不断发展,促进了无人艇的发展,在无人艇上装载的雷达设备,在设计方面有一定的要求,一般使用较多的是三轴伺服转台。
在实际设计过程中,通常采用模块化思想进行设计,将伺服转台的三个轴系与传动机构结合,在此基础上对轴系精度进行分析,运用相关软件对主要结构和要件的分析,并且经过相关验证后,使转台设计满足相关的指标和要求。
关键词:三轴雷达;转台结构;设计;仿真分析在现代的军事领域当中,雷达是必不可少的重要装备,不仅可以获取陆、海、空相关数据资料,还可以在战场上全天候地获取战略和战术情报,是当代防天,防空,防海以及防陆武器系统中重要的组成部分,也是实现指挥自动化的首要传感器。
而伺服系统具有良好搜索和跟踪功能,同时还具有监视和引导功能,这些功能是当代军事中不可少的,所以是重要的装备。
一套精密的伺服系统,因此对当代军事领域具有重要影响。
无人艇对工作环境的要求,以及技术方面的需求与其他系统有很大差别,所以研制三轴伺服雷达转台结构有重要意义。
无人艇在海面上行使的过程中,经常会遇到各种风浪,会导致无人艇出现摇摆情况,而三轴转台可以快速进行调整,使雷达天线保持稳定的状态。
1对三轴雷达转台的结构设计进行分析1.1对总体结构的设计分析转台的总体结构,主要包括了方位驱动和测角机构,还有俯仰驱动机构和横滚驱动机构。
其中的方位驱动,以及测角机构是整个转台的底座部分,而俯仰驱动机构是其中一侧的支臂,而俯仰测角单元是另外的一侧支臂,这两个支臂主要的通过俯仰轴,还有横滚机构来连接的。
在整个系统中雷达天线,是用一个筒形结构进行连接的,在横滚机构的前端部位与天线壳体间,采用了燕尾导轨的方式来安装和连接,但是在安装的过程中,要充分注意精度方面的要求。
该转台的结构优势是比较紧凑,所以力学性能较好,便于加工和后期维护。
在转台设计的内部,一般会隐藏布线,将所有的线缆全部地穿入到转台腔体内,这样会使外观更加地简洁美观。
全套CAD图纸,联系153893706第1章绪论1.1 课题背景远古时代,人类的祖先面对着充满神秘色彩的天空,编织出许多美丽、动人的神话、传说故事。
这些故事经过无数代人的流传,便真有了冒险者,不惜生命代价尝试原始的飞行探险。
1903年12月17日,莱特兄弟第一架动力飞机的试飞成功,使人类飞行的梦想变为现实。
但是人类并没有为此而满足,他们将眼光瞄准了更遥远的宇宙空间。
1926年3月16日,美国人戈达德制成了世界首枚液体火箭。
1957年苏联卫星首次进入太空。
1969年7月20日,阿波罗11号飞船登月成功。
1981年4月12日,世界上第一架航天飞机哥伦比亚号发射。
从此人类进入了宇宙探险时代。
最早,飞行器上天之前要用许多实物进行实验研究,这样不仅造成许多财力、物力、和人力的浪费,而且有限的实验所获得的规律也不是十分的准确,其中存在很大的偶然性。
随着人类航天活动的越来越频繁,对设备的可靠性及经济性的要求也越来越高。
尤其是近几年来几次重大的航天飞行事故促使人们对以往的实验手段进行了深刻的反省,开始了仿真测试设备的研究,仿真转台就是在这样的背景下产生和发展起来的。
二十世纪七十年代后,计算机尤其是数字计算机的发展为仿真技术提供了更高的技术基础。
现在仿真转台已应用到航空、航天设备的研制和测试的各个环节。
1.2 仿真转台的国内外发展状况1.2.1 国外仿真转台的发展状况美国是世界上最早研制和使用转台的国家,它的第一台转台于1945年诞生于麻省理工学院。
从那时起直到现在,美国的转台研制和使用,无论在数量、种类,还是在精度和自动化程度上都居于世界领先水平,代表了当今世界转台的发展水平和方向。
此外,英、法、德、俄等国也投入了大量的人力、财力进行仿真转台的研究。
但是以美国最为典型,下面主要以美国的转台研究和发展为例进行介绍。
回顾美国转台的发展过程,大体可以分为以下几个阶段:第一阶段的主要标志:用机械轴承支撑台轴,轴的驱动采用交流力矩电机。