三轴仿真转台上位机控制软件的研究
- 格式:pdf
- 大小:383.98 KB
- 文档页数:5
三自由度转台控制规律研究的开题报告一、选题背景和意义转台是一种常见的运动平台,用于各种科研、生产、测试等领域。
由于转台的运动特性较为复杂,因此需要针对不同应用场景,设计出适合的控制算法,以保证运动精度和稳定性。
当前,三自由度转台已经得到广泛应用,但是涉及到的控制算法还有很多需要进行研究和改进的地方。
因此,本文选取了三自由度转台控制规律研究作为开题报告的选题。
本次研究的意义在于:1.提高转台的运动精度和稳定性,为相关科研和生产提供可靠的技术支持。
2.深入研究三自由度转台的控制规律,为今后更为复杂的转台控制提供经验。
3.拓展转台控制的应用场景,促进转台技术的发展。
二、研究内容和方法1.研究内容本次研究的内容主要包括以下几个方面:1)三自由度转台的运动学建模和动力学建模,为后续控制算法设计提供基础。
2)传统的PID控制算法在三自由度转台上的应用,研究其控制效果并进行优化。
3)基于神经网络的控制算法在三自由度转台上的应用,研究其控制效果并进行优化。
4)基于智能控制算法的三自由度转台控制系统设计和实现。
2.研究方法本次研究采用以下方法:1)理论分析:通过理论分析的方式,建立三自由度转台的运动学和动力学模型,并基于模型设计控制算法。
2)仿真实验:在Matlab等仿真平台上,进行三自由度转台的仿真实验,研究不同控制算法的控制效果。
3)硬件实验:在实验室模拟三自由度转台的运动,并采集运动数据,研究不同控制算法的控制效果。
4)数学建模:通过建立数学模型,优化控制算法的参数,以达到更好的控制效果。
三、预期成果及进度安排1.预期成果1)成功建立三自由度转台的运动学和动力学模型,并基于模型进行控制算法设计。
2)研究三自由度转台传统的PID控制算法、基于神经网络的控制算法的控制效果,并进行优化。
3)开发基于智能控制算法的三自由度转台控制系统,并验证其控制效果。
2.进度安排1)第一阶段(1-2个月):对三自由度转台的运动学和动力学进行建模,并进行仿真实验。
三轴仿真转台控制系统的设计作者:孙克诚王琪来源:《无线互联科技》2015年第18期摘要:文章介绍了一种无人机飞行半物理仿真平台的控制系统,本系统是以ARM处理器为核心控制器,采用模块化设计的方法,设计了一个三轴转台控制系统。
系统采用PC机与下位机两级控制,使用积分分离式的PID控制算法,对三轴转台进行精确控制。
控制系统能控制三轴转台转动并对平台上捷联惯导系统姿态信息进行实时测量,保存和显示。
关键字:三轴转台;PID算法;STM32;姿态控制;捷联惯导系统;近些年来,随着现代战争的日益发展,无人机也因其无人驾驶的独特性能得到各国的重视与关注。
飞行仿真转台能够真实地模拟出无人飞行器的动力学特性,在实验室中就能对飞行器的飞行姿态进行仿真,是检测无人飞控系统性能以及进行半物理仿真实验的重要装置。
三轴转台的控制精度直接影响了仿真或调试、检测的结果,因此,三轴转台的控制系统设计往往决定了转台的质量。
本文结合实际设计了一种可实时测量平台上传感器数据的飞行仿真转台控制系统。
1系统结构及总体方案设计本三轴转台控制系统由惯性传感器模块、STM32微控制电路、OLED显示模块、按键输入模块、步进电机驱动模块、RS 232串口通信模块、编码器数据采集模块等部分组成。
系统整体结构框图如图1所示。
惯性传感器系统采集到原始信号,通过I2C总线发送给STM32微控制器,STM32控制器运用捷联惯导算法处理惯性传感器获得的数据,解算出转台的实时姿态。
在LCD液晶显示屏上实时显示姿态参数,另外使用MAX3232将TTL电平转换成RS232电平,再与PC机的COM口连接,并将姿态数据打包成固定格式的串口数据包,通过串口发送给上位机软件,在PC端上位机软件实时动态显示姿态参数和波形曲线。
在上位机软件上可以控制三轴平台的状态,模拟无人机的俯仰、翻滚、航向三轴方向上的姿态控制,控制信息通过COM口发送给STM32控制器,编码器模块采集三轴平台的转动数据经过PID算法处理后反馈给驱动电路控制步进电机转动,提高了三轴转台的转动精度。
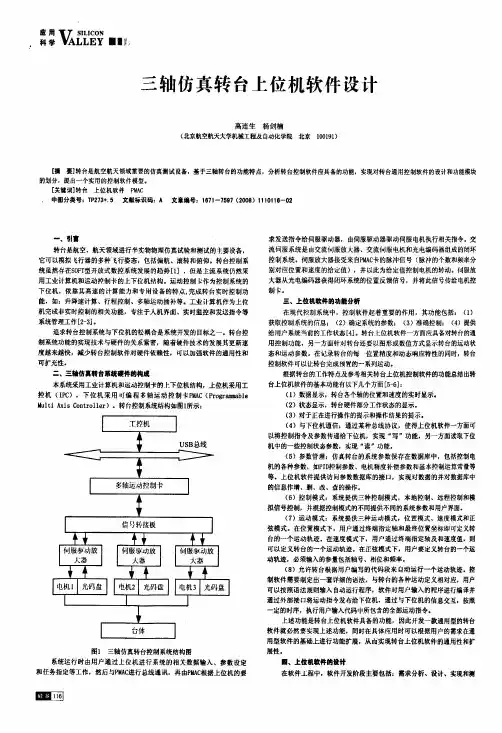
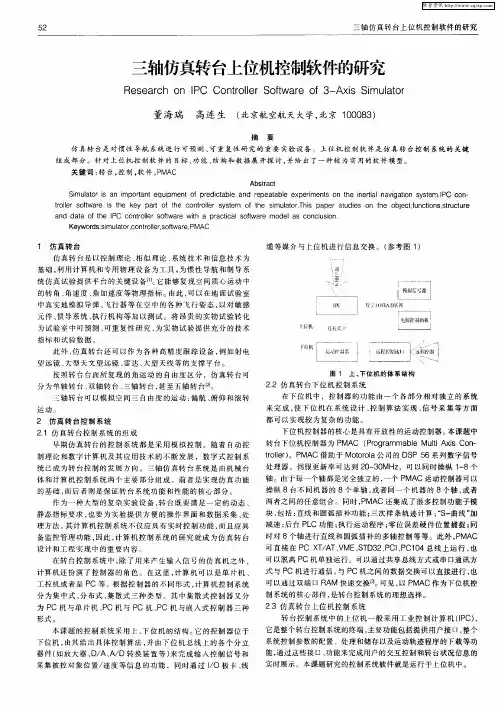
三轴仿真转台上位机控制软件的研究三轴仿真转台上位机控制软件的研究Research on I PC ControlIer Software of3一Axis SimuIator董海瑞高连生(北京航空航天大学,北京100083摘要仿真转台是对惯性导航系统进行可预测、可重复性研究的重要实验设备。
上住机控制软件是仿真转台控制系统的关键组成部分。
针对上住机控制软件的目标、功能、结构和数据展开探讨,并给出了一种较为实用的软件模型。
关键词:转台,控制,软件,PMAC.Abst怕ctS}mu}ator ts an imponant equipment of predictabfe and repeatabIe experiments on 价e inert.aI navigation system.IPC con—troIler software is the key part of the controIIer system of the s.muIaCor.This paper sCudies on the object.functions.Struclure and daIa Of the IPC contrO¨er sOfhⅣare with a DracticaI sOfhⅣare mOdeI as cOnclusiOn.K∞MOrds:simulalor.contro¨er,software.PMAC1仿真转台仿真转台是以控制理论、相似理论、系统技术和信息技术为基础,利用计算机和专用物理设备为工具,为惯性导航和制导系统仿真试验提供平台的关键设备【1】。
它能够复现空间质心运动中的转角、角速度、角加速度等物理指标。
由此,可以在地面试验室中真实地模拟导弹、飞行器等在空中的各种飞行姿态,以对敏感元件、惯导系统、执行机构等加以测试。
将昂贵的实物试验转化为试验室中可预测、可重复性研究,为实物试验提供充分的技术指标和试验数据。
三轴仿真转台设计及动力学研究的开题报告
一、选题的背景和目的:
随着现代科技的快速发展,仿真技术在工程设计、现场应用、教育培训等领域发挥着
越来越重要的作用。
三轴仿真转台作为一种常见的机电设备,广泛应用于天文、航空、航天等领域的测试和实验中。
本课题旨在设计一种新型的三轴仿真转台,并进行动力
学研究,为实验和测试提供更加准确、高效和稳定的技术支持。
二、研究内容和方法:
1. 设计新型三轴仿真转台:
本课题将设计一种新型的三轴仿真转台,该转台将采用柔性连接技术,增加制动装置
和传感器,提高其稳定性和可靠性。
同时,针对不同领域的应用需求,改变转台的尺寸、载重量等参数。
2. 进行动力学研究:
利用MATLAB软件对设计的新型三轴仿真转台进行动力学仿真分析,主要包括静态力学、动态力学、运动学等方面的研究。
通过研究转台的运动轨迹、加速度、角速度等
参数,评估其性能和稳定性,提出改善措施。
三、研究意义和预期成果:
1. 研究意义:
通过设计新型三轴仿真转台,提高其稳定性和可靠性,为测试和实验提供更加准确、
高效和稳定的技术支持。
同时,研究其动力学特性,掌握其运动状态,为优化控制提
供可靠的理论支持。
2. 预期成果:
设计出一种新型的三轴仿真转台,能够满足不同领域的测试和实验需求。
通过动力学
研究,掌握其运动状态和特性,提高其控制精度和稳定性。
同时,为进一步对仿真技
术进行研究和应用提供可行性和可靠性的技术支持。
三轴测试转台控制方法研究与实现的开题报告一、选题背景随着现代科技的发展,各种机电设备得到了广泛应用,其中转台是一个重要的设备。
转台可以用于惯性传感器、姿态控制系统、导航系统等多个领域中,并且在这些领域中,对转台的控制要求很高。
而三轴测试转台的出现,则是为了满足更多领域对控制的需求。
传统的二轴测试转台的运动轨迹只是在水平面内,无法满足某些场合对垂直方向的控制需求。
三轴测试转台则可实现空间上的任意方向控制,大大提高了转台的控制精度和使用范围。
本课题选题基于三轴测试转台的控制问题,旨在研究三轴测试转台的控制方法及实现,以提高转台的控制精度和可靠性。
二、研究意义三轴测试转台被广泛应用于各种科学研究和工程控制中。
例如,惯性导航、惯性测量单元、航天器姿态测量、气象观测以及物理实验等。
研究三轴测试转台的控制方法及实现,可以提高转台的控制精度和可靠性,满足各种场合的控制需求,并且在一定程度上,可以减轻人工操作的工作量,提高工作效率。
三、研究内容本课题旨在研究三轴测试转台的控制方法及实现,具体内容包括:1、研究不同控制方法对三轴测试转台运动轨迹的影响,确定最佳控制方法;2、设计三轴测试转台控制系统,包括控制器硬件和软件的设计;3、实现三轴测试转台的控制,包括自动控制和手动控制两种方式;4、对三轴测试转台控制精度和稳定性进行测试分析,评估系统的性能。
四、技术路线本课题的技术路线主要包括以下几个方面:1、研究控制方法:包括PID控制方法、模糊控制方法等,确定最佳控制方法;2、控制系统设计:设计控制器硬件和软件;3、三轴转台控制实现:实现自动控制和手动控制两种方式;4、系统性能分析:对三轴测试转台控制精度、稳定性和可靠性进行测试分析,评估系统的性能。
五、预期结果通过对三轴测试转台的控制方法及实现研究,预期可以达到以下结果:1、确定最佳控制方法,提高转台的控制精度和可靠性;2、设计一个稳定的三轴测试转台控制系统,实现自动控制和手动控制两种方式;3、实现对三轴测试转台的控制,满足各种场合的控制需求;4、对系统的性能进行测试分析,评估系统的可靠性和稳定性,为后续开发和实际应用提供技术支持。
三轴惯性陀螺测试转台控制系统的研制摘要:介绍了三轴惯性陀螺测试转台的工作方式及其控制系统的功能,研究了以8051单片机为系统控制核心的转台控制器的硬件及软件设计问题,提出了采用8051单片机及Intel8254定时/计数器对步进电机进行开环位置及速度控制的解决方案。
关键词:陀螺测试转台单片机步进电机运动控制导航系统是飞行器的重要组成部分。
惯性陀螺仪表普遍应用于各种类型的飞行器的导航系统中,它反映了飞行器的飞行姿态以及其它重要导航信息,保证了人为或自动驾驶仪对飞行器进行控制的安全性与准确性。
为了确保惯性陀螺仪表工作的可靠性,需要对仪表进行定期的校验,用测试转台测试陀螺仪表是比较常用的方法。
某机场所使用的测试转台大部分存在老化严重以及功能单一的问题,尤其是部分转台还是老式的手动转台,很难保证校准精度,所以需要研制新型数字化的低成本的高精度陀螺测试转台及其控制系统。
1陀螺测试转台及其控制系统介绍陀螺测试转台主要由高精度转台及其控制系统组成。
三轴转台由ψ轴转台、θ轴转台、φ轴转台三个子系统组成,分别实现三个轴的转动。
各子系统由台体、驱动系统、转动系统以及执行机构组成。
选用步进电机作为各子系统驱动装置,经蜗轮蜗杆及齿轮减速后输出旋转运动。
转台的三个子系统中,θ轴转台固定在ψ轴转台的转盘上,φ轴转台固定在θ轴转台的转盘上。
将被测试陀螺仪表固定于φ轴转台的转盘上,按测试要求控制转台各轴进行旋转,模拟飞机飞行中的各种姿态,陀螺仪表则输出相应的姿态信息,比较转台的姿态与仪表的输出即可校对仪表偏差。
各子系统的运转由其控制器控制。
控制器的主要功能是接收操作人员的控制指令,对控制面板输入的控制参数进行计算或转换,变为步进电机的运转控制信号,输出到测试转台;转台在控制器的控制下可工作在速度、转角、自动等模式;转台控制器能够与上位计算机进行串行通讯,并执行上位计算机的控制指令。
转台与控制器之间通过航空插头连接起来,其传输的信号包括步进电机的驱动信号和惯性陀螺仪的反馈信号。
收稿日期:2022-07-01基金项目:上海人工智能创新发展专项(2019 RGZN 01044)引用格式:王刚,孙健,刁雪慧,等.双三轴仿真转台同步控制系统研究[J].测控技术,2023,42(8):94-99.WANGG,SUNJ,DIAOXH,etal.SynchronousControlSystemofDoubleThree AxisSimulationTurntable[J].Measurement&ControlTechnology,2023,42(8):94-99.双三轴仿真转台同步控制系统研究王 刚1,孙 健1,刁雪慧1,周金芳1,吉亚平2(1.上海新跃联汇电子科技有限公司,上海 200233;2.上海航天控制技术研究所,上海 201109)摘要:双三轴仿真转台的同步控制和动态特性指标关系到导航与制导系统的优劣。
针对双转台之间的时钟同步问题,提出基于IEEE1588时钟同步协议和光纤反射内存网的时钟同步方法,通过时间服务器接收GPS或北斗时钟时间信号输出1ms方波,进一步通过光纤反射内存网络进行时钟脉冲分发实现不同系统之间的时钟同步。
针对原本双转台动态同步控制需要手动精调同步参数且容易出现超调现象的不足,提出一种基于参考模型自适应的同步控制方法,以其中一台性能较好的转台作为参考模型,另一台性能较差的转台通过自适应算法进行跟踪控制,从而实现双转台之间的同步控制。
通过仿真验证和实验验证,证明该算法稳定可靠,易于实现,可以有效地提高双转台之间的动态同步特性。
关键词:双转台同步;三闭环控制;IEEE1588;参考模型自适应中图分类号:TP273+.5 文献标志码:A 文章编号:1000-8829(2023)08-0094-06doi:10.19708/j.ckjs.2022.11.319SynchronousControlSystemofDoubleThree AxisSimulationTurntableWANGGang1 牞SUNJian1牞DIAOXuehui1牞ZHOUJinfang1牞JIYaping2牗1.ShanghaiXinyueLianhuiElectronicTechnologyCo.牞Ltd.牞Shanghai200233牞China牷2.ShanghaiInstituteofSpaceflightControlTechnology牞Shanghai201109牞China牘Abstract牶Thesynchronouscontrolanddynamiccharacteristicindexofdualthree axissimulationturntablere latedtotheadvantagesanddisadvantagesofthenavigationandguidancesystem.Inordertosolvetheproblemofclocksynchronizationbetweentwoturntables牞aclocksynchronizationmethodbasedonIEEE1588clocksyn chronizationprotocolandopticalfiberreflectivememorynetworkisproposed.ThetimeserverreceivesGPSorBeiDouclocktimesignalandoutputs1mssquarewave.Further牞theclockpulseisdistributedthroughopticalfiberreflectivememorynetworktoachieveclocksynchronizationbetweendifferentsystems.Inviewofthefactthattheoriginaldynamicsynchronouscontrolofdualturntablesrequiresmanualfineadjustmentofsynchronousparametersandispronetoovershoot牞asynchronouscontrolmethodbasedonreferencemodeladaptationispro posed.Oneturntablewithgoodperformanceisusedasthereferencemodel牞andtheotherturntablewithpoorperformanceistrackedandcontrolledthroughadaptivealgorithm牞soastorealizethesynchronizationcontrolbetweendualturntables.Throughsimulationandexperimentalverification牞itisprovedthatthealgorithmissta ble牞reliableandeasytoimplement牞andcaneffectivelyimprovethedynamicsynchronizationcharacteristicsbe tweentwoturntables.Keywords牶doubleturntablesynchronization牷threeclosedloopcontrol牷IEEE1588牷referencemodeladaptation 三轴仿真转台是航空、航天领域中进行半实物仿真的关键设备,仿真转台一般考量系统的动态特性,其动态特性指标直接关系到导航和制导系统的优劣[1]。
三轴飞行模拟转台实时控制软件的开发
李秀娟
【期刊名称】《南京航空航天大学学报》
【年(卷),期】1998(030)004
【总页数】4页(P443-446)
【作者】李秀娟
【作者单位】南京航空航天大学自动控制系
【正文语种】中文
【中图分类】V216.7
【相关文献】
1.电动三轴飞行模拟转台的设计研究 [J], 赵子鹏
2.三轴飞行模拟转台的动态特性分析 [J], 赵雨旸;李涵武
3.三轴飞行模拟转台控制系统设计 [J],
4.用模态综合法对三轴飞行模拟转台进行动力学分析 [J], 张建华;姜寿山;祝强
5.RTX的三轴仿真转台实时控制软件设计与实现 [J], 宋利利;王宏
因版权原因,仅展示原文概要,查看原文内容请购买。
信息化工业科技创新导报 Science and Technology Innovation Herald9DOI:10.16660/ki.1674-098X.2017.24.009三轴加速度测试器上位机开发研究金明祺1 王国庆1 李继方2(1.河南大学附属中学 河南开封 475000;2.华北水利水电大学 河南郑州 471000)摘 要:开发了一种三轴加速度测试器的上位机软件,该软件包括数据擦除、时间设置、数据接收以及数据分析4个功能模块。
具有数据平滑及融合,图片信息保存及导出功能。
其中,数据平滑通过FIR滤波器实现,并可合理选择窗函数类型实现最优平滑效果;数据融合策略采用三轴加速度加权平均融合,以获取三轴加速度的同步矢量和峰值;图片信息处理采用C++类库中的TeeChart画图工具实现,具有方便快捷特点;通过系统功能的调试与测试,验证了上位机系统设计的可行性。
关键词:FIR滤波器 数据融合 调试与测试中图分类号:TP311.52 文献标识码:A 文章编号:1674-098X(2017)08(c)-0009-03Abstract: The Upper computer software is exploited to process data collecting from a three axis acceleration recorder. This software has four functional modules including data erasure, time setting, data reception and data analysis. Data analysis module has ability in aspect of data processing such as smoothness, fusion and export.Moreover, the FIR filter is introduced for the optimal smooth effect via selecting reasonable window-function types. Finally, vector sum of three axis acceleration is calculated by weighted average fusion method. Since using TeeChart class library of C++, our software have visualization, convenient and flexible characteristic. Effectivenessof our design is verified by experiments.Key Words: FIR filter; Data fusion; Debugging and experiments三轴加速度测试器能够记录存储加速度等运动状态信息,通过相应的上位机软件做详细分析提取出受力情况详情,以此来对物资包装进行相应调整和改进,为物资安全运输保驾护航[1],现有三轴加速度测试器通常采用单片机主控芯片,串口通信模式进行上下机信息传递,具有价格便宜、功耗低,体积小巧等优点[2]。