步进电机基本原理-第一节
- 格式:doc
- 大小:24.50 KB
- 文档页数:2



步进电动机是一种将电脉冲信号转换成角位移或者线位移的机电元件。
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或者步进运动。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
由于步进电动机能直接接受数字量的控制,所以特殊适宜采用微机进行控制。
图1 三相反应式步进电动机的结构示意图1 ——定子2——转子3——定子绕组{{分页}}图1 是最常见的三相反应式步进电动机的剖面示意图。
机电的定子上有六个均布的磁极,其夹角是60º。
各磁极上套有线圈,按图1 连成A、B、C 三相绕组。
转子上均布40 个小齿。
所以每一个齿的齿距为θ E=360º/40=9º,而定子每一个磁极的极弧上也有5 个小齿,且定子和转子的齿距和齿宽均相同。
由于定子和转子的小齿数目分别是30 和40,其比值是一分数,这就产生了所谓的齿错位的情况。
若以A 相磁极小齿和转子的小齿对齐,如图1,那末B 相和C 相磁极的齿就会分别和转子齿相错三分之一的齿距,即3º。
因此,B、C 极下的磁阻比A 磁极下的磁阻大。
若给B 相通电,B 相绕组产生定子磁场,其磁力线穿越B 相磁极,并力图按磁阻最小的路径闭合,这就使转子受到反应转矩(磁阻转矩) 的作用而转动,直到B 磁极上的齿与转子齿对齐,恰好转子转过3º;此时A、C 磁极下的齿又分别与转子齿错开三分之一齿距。
接着住手对B 相绕组通电,而改为C 相绕组通电,同理受反应转矩的作用,转子按顺时针方向再转过3º。
挨次类推,当三相绕组按A一B一C一A 顺序循环通电时,转子会按顺时针方向,以每一个通电脉冲转动3º的规律步进式转动起来。
若改变通电顺序,按A一C一B一A 顺序循环通电,则转子就按逆时针方向以每一个通电脉冲转动3º的规律转动。
因为每一瞬间惟独一相绕组通电,并且按三种通电状态循环通电,故称为单三拍运行方式。
步进电机基本原理讲解步进电机是一种特殊类型的电机,主要通过数字控制来完成精密转动和定位。
步进电机可以实现非常精确的运动控制,广泛应用于各种设备和机器人系统中。
本文将介绍步进电机的基本原理和工作方式。
1. 步进电机的构成步进电机基本上由两部分组成:转子和定子。
转子是电机旋转的部分,它由可旋转的磁极和磁性材料组成。
定子是电机静止的部分,它由电枢线圈和永磁体组成。
2. 步进电机的工作原理步进电机是通过不断改变电流方向来实现旋转的。
电流会产生磁场,当磁场和永磁体相互作用时,就会形成旋转力。
步进电机通过改变电流来控制磁场和旋转力。
步进电机的运行速度由提供的电压和电流控制。
步进电机驱动器会根据设定值改变电流方向和大小,控制电机旋转的速度和方向。
每次改变电流方向都会使电机旋转一个步距,所以步进电机转动的角度可以精确地控制,从而可以精确定位。
3. 步进电机的工作方式步进电机工作时,一般驱动器会按照指定的步进角度进行操作。
步进角度可以是1.8度、0.9度、0.45度或更小。
启动电机时,驱动器会向电机提供电压和电流,控制转子旋转。
控制电流方向和大小可确定电机的转角和速度。
这是一个相对精确的过程,因为每次改变电流方向都会使电机旋转一个步距,因此可以准确控制步进电机的位置和速度。
步进电机通常使用双极性或四极性驱动,也就是说,每次驱动电机时,都会使电机旋转两个或四个步数。
双极性驱动需要两个控制信号,而四极性驱动则需要四个。
四极性驱动具有更高的分辨率和精度,因为旋转步数更小,但也需要更复杂的控制。
4. 步进电机的应用步进电机常用在需要准确控制位置和速度的系统中。
例如精密仪器和设备、电子石英钟、纺织机、数控机床、打印机和绘图仪等。
步进电机还广泛用于机器人领域,包括自动化制造和堆垛机器人、医疗器械和照片扫描仪等。
在自动化制造行业中,步进电机可以帮助机器人、自动化设备和其他工业设备实现非常精确的位置和速度控制。
步进电机也可以在汽车发动机和机器人手臂等可更换关键零部件中使用,以便进行快速、准确的位置定位。
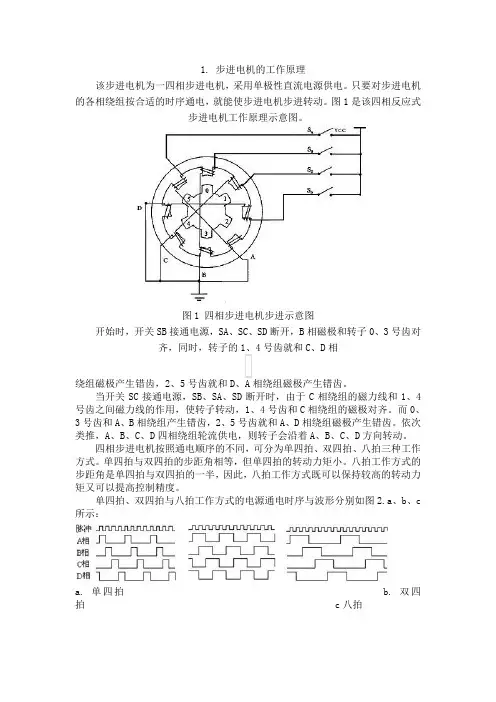
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四拍c八拍51单片机驱动步进电机的方法。
驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。

步进电机基本原理讲解步进电机是一种常见的电机类型,它被广泛地应用于各种控制系统中,比如机床、自动控制设备等。
在控制系统中,步进电机能够通过机电-电机转换,带动机械执行机构实现工作。
步进电机与其他电机的最大区别是,它可以通过步进角度控制器实现精确的位置控制,这是同步马达等其他电机无法做到的。
步进电机基本工作原理步进电机的工作原理简单来讲就是根据电流方向的改变,产生强烈的磁力,从而带动转子的转动。
步进电机的机构是由转子和定子构成的,定子包含两个磁场,一个是固定的,称为主磁场,另一个则可根据电流方向的改变而变化,称为励磁磁场。
转子是由永磁体或同样有磁性的材料制成的。
根据不同类型的步进电机,它们由不同数量的极数和磁阻曲线组成。
在输入电流时,这些磁阻曲线随着电流的变化而改变,在电机内部不停生成旋转的磁场,从而带动转子旋转。
步进电机的控制基本原理在控制步进电机时,需要一个步进角度控制器,用于改变电流的方向和大小。
一般来说,控制器会将输入的数字信号转换成逻辑信号,再根据信号的逻辑状态向电机输出不同的电流,从而控制电机的转动。
这种控制方式又叫做开环控制,因为在控制步进电机时无法直接获取电机的位置信号,需要通过步进角度的控制来达到精确的位置控制。
步进电机的优点和缺点典型的优点是步进电机可实现高精度的位置控制和常规电机相比更安静的运转。
步进电机也不太容易故障,而且有多种控制方式和多种类型的电机可供选择,以适应不同的应用需要。
如果需要进行高速和重复性运动,步进电机也是很好的选择。
然而,步进电机在低速运动时呈现出支付得降低的特点,因为它只在输入系统获得相应的指令前向前移动一小步。
另外,步进电机的输出功率也有限,因此只能用于不需要特别大的动力输出的应用。
此外,步进电机的控制也相对复杂,需要调试和配置。
总结步进电机是一种广泛应用的电机类型,具有精确定位、静音等优点,同时也有一些限制。
在控制步进电机时,需要了解它的基本原理及其控制方式,这对于在控制系统中使用步进电机是非常必要的。
步进电机的基本原理
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电机是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛,也是本次细分驱动方案所选用的步进电机。
步进电机的一些基本参数:
电机固有步距角:
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为…电机固有步距角‟,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
步进电机的相数:
是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。
在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。
如果使用细分驱动器,则…相数‟将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
保持转矩(HOLDING TORQUE):
是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为
2N.m的步进电机。
DETENT TORQUE:
是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
步进电机的一些特点:
1.一般步进电机的精度为步进角的3-5%,且不累积。
2.步进电机外表允许的最高温度。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3.步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
步进电动机以其显著的特点,在数字化制造时代发挥着重大的用途。
伴随着不同的数字化技术的发展以及步进电机本身技术的提高,步进电机将会在更多的领域得到应用。