食饵-捕食者
- 格式:ppt
- 大小:404.00 KB
- 文档页数:15
捕食者-食饵系统中的功能性反应简介、引言生态学是研究有机体与其周围环境相互关系的科学。
随着人类社会的物质文明及科学技术发展到新的高峰, 同时, 人类活动对于地球和生物圈的负影响也上升到新的高度, 并已威胁到持续发展, 甚至于人类自身的生存。
生物多样性的丧失, 气候变暖, 生物入侵等都对整个地球生物圈产生了根本的影响。
因此, 人与自然必须协调发展的思想和发展经济必须保护自然环境和生物多样性同步的观点, 已经被人们广为接受。
而生物数学作为生态学重要组成部分, 引起了各国学者的广泛重视。
生物数学在很早就已经开始萌芽, 如著名的Malthus 和Logistic 人口增长模型:在这里,x(t)表示人口的数量,r和K分别代表人口的内禀增长率和最大环境容纳量。
1900 年, 意大利著名数学家V.Volterra 在罗马大学的一次题为“应用数学于生物和社会科学的成就”的演讲, 标志着生物数学发展到一个里程碑。
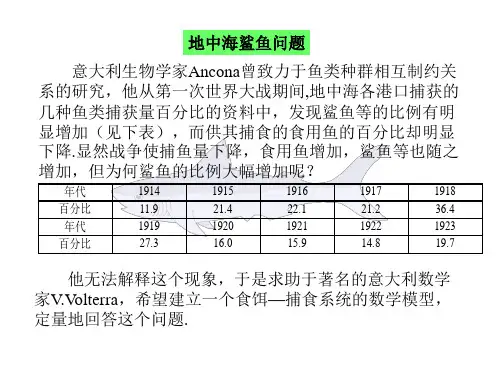
特别是在1926 年, Volterra 发表了解释Finme 港鱼群变化规律的著名论文, 使生物数学的发展一度达到高潮。
最近30 年, 生物数学呈现一派欣欣向荣的局面, 它所建立的模型和方法, 不仅直接推动着生态学的发展, 对自然科学的其他领域, 也产生着重要的影响。
我们主要介绍生态学及生物数学的一个重要组成部分――种间关系中捕食者- 食饵系统的功能性反应。
种群是在同一时期内占有一定空间的同种生物个体的集合。
长期以来, 种群之间的相互关系( 简称种间关系) 包括竞争, 捕食, 互利共生等, 是构成生物群落的基础, 并一直影响着种群的持续生存与灭绝。
其中, 捕食已经被证明是构成生物群落的一种主要的力量, 而功能性反应是各物种发生捕食作用的基石, 更是数学建模的主要手段。
因此对它进行详细的总结和论述具有及其重要的意义。
二、功能性反应及在捕食者- 食饵系统中的应用功能性反应定义为在单位时间内一个捕食者杀死食饵的数量, 描述了在不同营养等级之间的生物转移量。
食饵或捕食者具有疾病的食饵—捕食系统的分析的开题报告一、研究背景在生态系统中,食物链起着重要的作用。
生物通过食物链传递能量和物质,维持着生态环境的平衡。
与此同时,疾病也是生态系统中一个重要的因素,它会影响动植物的生存和繁衍。
然而,在食饵—捕食系统中,食饵携带疾病对捕食者的影响却鲜有研究。
二、研究意义疾病在生态系统中的作用已经被广泛研究,但对于食饵—捕食系统中的疾病影响却鲜有人研究。
此次研究旨在探讨食饵携带疾病对捕食者生存和繁殖的影响,有助于更好地理解生态系统中的相互作用和生态平衡。
三、研究内容本研究将以一个简单的模型为基础,模拟疾病在食饵和捕食者之间的传播过程,进一步研究疾病对捕食者的影响。
1. 建立模型本研究将建立一个传染疾病在食饵—捕食者系统中的传播模型,包括食饵种群和捕食者种群。
2. 模拟传染过程通过模拟传染过程,研究疾病在食饵和捕食者之间的传播特征,分析其对捕食者种群的影响。
同时,研究疾病在食饵和捕食者之间的不同传播途径和不同传染力的影响。
3. 分析结果分析模型仿真结果,研究疾病对捕食者种群数量、生长和繁殖的影响,分析食饵、捕食者和疾病三者之间的关联。
四、研究方法本研究采用基于差分方程的模型进行仿真,利用MATLAB软件进行大量仿真实验,通过计算机模拟得到食饵—捕食者系统的传染过程和疾病对捕食者的影响。
五、预期结果通过本研究我们将了解固定的捕食者数量和食饵的繁殖和死亡如何影响疾病在食饵和捕食者间的传播和不同疾病强度的影响。
预计该研究将有助于更好地理解生态系统中食饵—捕食者系统的结构和演化,对生态环境保护和农业生产管理等方面具有重要的应用价值。
具有三种群的食饵-捕食者模型的研究作者:杨开应孔令聪徐廷富吴忠诚徐政来源:《科技风》2019年第22期摘要:本文在考虑具有三种群(植物、哺乳动物和爬行动物)的Volterra模型基础上,分析生态食物链之间的捕食关系。
在指数增长模型和Logistic模型的基础上,通过建立微分方程来描述不同种群之间的数量变化规律,并运用数学软件MATLAB对微分方程组进行数值求解。
然后对植物、哺乳动物和爬行动物三种群生存在同一环境中的相互依存、相互制约的稳定性进行分析找到平衡稳定点。
最后对数值结果和图形的观察,以及对平衡点进行分析和验证,得出种群间稳定的条件。
关键词:食饵-捕食者系统;三种群;Volterra模型;logistic项;稳定性1 绪论20世纪20年代意大利著名数学家Volterra建立了一个简单的食饵-捕食者模型,这个数学模型解答了由意大利生物学家D’Ancona所提出的问题[1]。
即:如果食饵的繁殖力下降,会导致捕食者的数量减少,但是却会增强捕食者的掠取能力;捕食者的死亡率上升,会导致食饵数量的增多,食饵对捕食者的供养能力增强,则会导致食饵的数量减少。
此类问题的提出和解决,为后来生物学家和数学家建立食饵-捕食者模型系统打下基础[1]。
如果在一个岛屿上生长着茂盛的植物,栖居着爬行动物和哺乳动物;哺乳动物依赖植物生存,爬行动物捕食哺乳动物,那么他们之间会有什么样的数量关系呢?运用数学模型描述、对食饵-捕食者系统的动态过程和稳定状态进行分析,不仅在生态学的研上具有重要意义,还会因与微分方程的定性理论有着密切联系,而引起大量的数学家的关注。
同时,了解种群间的增长规律有利于我们更好的进行农田管理以及对自然生态的宏观管理,使其健康持续发展。
2 具有三种群的食饵-捕食者模型我们把Volterra建立的这种只有两个种群的简单模型称作Volterra模型。
这种模型虽然能解释一些现象,但是Volterra模型存在描述的周期变化状态不是稳定结构等缺点。
楚雄师范学院数学系《数学建模》课程教学论文题目:具有自身阻滞作用的两种群食饵—捕食模型专业:信息与计算科学班级:08级3班学号:20081022152学生姓名:罗文枢完成日期:2011 年 6 月具有自身阻滞作用的两种群食饵—捕食模型摘要:在自然界中,更多的生物是杂居在一起的,各种生物根据其生理特点、食物来源分成了不同的层次,各层次之间及同一层次的生物种群之间有着各样的联系,尤其是相互之间影响非常大的生物种群,需要放在一起讨论,在这里,我们一两种群为例进行建模和讨论,具有自身阻滞作用的两种群食饵—捕食者模型。
捕食—食饵模型是数学生态学研究的重要内容,影响种群波动的因素很多,自身阻滞作用就是其中重要的一种因素。
因为资源环境是有限的,相互竞争是不可避免的,所以自身阻滞也是影响平衡位置的不稳定性和周期波动现象的主要因素。
时滞可以对生态系统的性质产生相当大的影响,理论生态学家们普遍认为在种群的相互作用中,自身阻滞作用是不可避免的。
本文主要通过对两类具有自身阻滞作用的典型的捕食-食饵模型的研究,通过分析发现时滞对模型的稳定性有非常重要的作用。
事实上只要在Volterra模型加入考虑自身阻滞作用的Logsitic项就可以得到这种现象了。
关键字:自身阻滞,稳定性分析,相轨线分析,平衡点分析,Logistic模型;一.问题重述:讨论具有自身阻滞作用的两种群食饵—捕食者模型,首先根据两种群的相互关系建立模型,解释参数的意义,然后进行稳定性分析,解释平衡点稳定的实际意义,对模型进行相轨线分析来验证理论分析的正确性。
二.问题分析:本论文主要是讨论具有自身阻滞作用的食饵—捕食者模型。
我们用Logistic模型来描述这个种群数量的演变过程,即食饵会受到自然界中的资源所限制,它不仅会无限的增大,而且捕食者也会受到食饵的数量的影响。
此种情况下会出现以下的3种现象:1.当捕食者灭绝时,食饵也不会无限的增长,即指数函数型增长,因为有自身的阻滞作用,它达到某个数量就不在会增长而趋于稳定了;2.当食饵受到自然资源的影响的灭绝时,捕食者也会因食物而灭绝;3.当两种群都不灭绝时,它们会趋于某个非零的有限值,从而达到稳定状态。
南京航空航天大学硕士学位论文两类具有Holling功能反应的食饵—捕食者模型的定性分析姓名:***申请学位级别:硕士专业:应用数学指导教师:***20070301南京航空航天大学硕士学位论文摘要近年来,捕食关系成为数学与生态学界研究的一个重要课题。
食饵—捕食者相互作用的研究具有非常重要的理论意义和应用价值,其中生物种群持续生存是捕食理论中的一个重要而又广泛的问题,它受到越来越多的学者的关注。
本文在已有的Lotka-Volterra模型的基础上,对两类具有Holling型功能反应函数的食饵—捕食者模型进行了讨论。
本文首先讨论了一类两种群具有密度制约的Holling III类功能反应模型。
利用定性分析的方法,讨论了模型在收获率条件下平衡点的稳定性,解的有界性,极限环的存在性问题。
然后本文讨论了一类具有两捕食者和一食饵三种群并有Holling型功能反应的周期系数的三维模型,利用Brouwer不动点定理,得到系统存在唯一、全局渐近稳定周期解的充分条件。
最后本文进一步考虑概周期情形,讨论了对应的概周期系统的一致持续生存性,得到了存在唯一、全局渐近稳定正概周期解的充分条件。
这些结果推广了已知的一些结论。
关键词:食饵—捕食者系统,Holling III功能反应,正周期解,正概周期解,全局渐近稳定性I两类具有Holling功能反应的食饵—捕食者模型的定性分析IIAbstractIn recent years, the predator-prey relation has become a very important part inmathematics and ecology. The predator-prey theory has a great importance in both theory and applications. One of the most important questions in population ecology is to find the permanence conditions for the species, which has received a great deal of attention of many mathematicians and biologists. Based on the Lotka-V olterra population models, this thesis studies two classes of predator-prey systems with Holling functional responses. Firstly, this thesis studies the predator-prey system with Holling’s type III functional response under density restriction and linear harvesting rate. Using qualitative analysis methods, the paper studies the boundedness of solutions and the existence of limit cycles. Secondly, two-predator and one-prey systems of three species with Holling’s type III functional response and periodic coefficients are studied. With the help of differential inequality and Liapunov functions, some sufficient conditions are obtained for the existence and global stability of positive periodic solutions and positive almost periodic solutions. These results generalize some existing results.KEY WORDS: prey-predator system, Holling’s type III functional response, positive periodic solution, positive almost periodic solution, global asymptotic stability承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
具有干扰因素的食饵-捕食者模型分析目录目录摘要…………………………………………………………………第一部分前言………………………………………………………1.1 生态数学的的研究背景及发展…………………………………1.2 基础知识…………………………………………………………第二部分 Lotka-Volterra模型的改进及其稳定性的研究…………2.1Lotka-Volterra模型………………………………………………2.2模型的研究对象及改进…………………………………………2.3 模型的稳定性的研究……………………………………………第三部分数值模拟3.1利用matlab对模型进行了数值模拟……………………………3.2模型缺陷…………………………………………………………第四部分总结………………………………………………………致谢…………………………………………………………………参考文献………………………………………………………………第一部分 前言1.1 生态数学的的研究背景及发展生态系统具有稳定性、可测性和可控性三大属性,是多层次的、多因子的、多变量的系统,只用常规的定性描述和一般的数理统计,搞不清楚它的内在规律,运用数学模型对生态系统实行管理、预测和调控,使其持续稳定发展是现代生态学研究的重要领域。
种群动力学是生态学的一个重要分支.它广泛地利用数学思想加积分方程、差分方程、泛函微分方程、偏微分方程、算子理论等数学学科中的理论和方法,通过数学建模研究生物种群的生存条件、生物种群与环境之间相互作用的过程、生物种群的演变和发展趋势.揭示生物种群的变化规律,合理利用资源,促进生态平衡这是迄今为止数学在生态学中应用深入,发展最为系统和成熟的分支,种群 动 力 学的研究有着悠久的历史.早在1798年,Malthus 在研究人类的增长时,他引入数学方法,建立了最早的连续确定模型一一Malth 。
模型)(/)(t rN dt t dN =这是一个单种群模型.它反应了人类数量的变化,在t 不很长时是比较符合实际的,但当+∞→t 时种群规模将无限增长是不合实际的,究其原因在于它没有考虑到有限的资源对种群增长的制约作用.针对这个模型,后人不断分析各种因素的影响,完善和改进这一模型,使之能较好地反应人口(单种群)的变化规律,如P. F.Verhulst(1938年)建立的Logistic 模型)/)(1)((/)(k t N t rN dt t dN -=E.M .W right(1945年)建立的有确定时滞的Logistic 模型)/)(1)((/)(k r t N t rN dt t dN --=P. M. Nisbet 和W. S. C. Gurney(1984年)建立的具有生理阶段结构(stagestructure) 模型以及H. 1. Freedman 研究的具有斑块迁移的单种群模型等,无一不是对Malthus 模型的完善和扩展,极大地推动了种群动力学的发展现 实 世 界中种群不可能单独存在,它必与相关种群相互作用,相互依存.Lotka-Volterra 模型是种群动力学中最为经典和重要的两种群相互作用的动力学模型,该模型分别由意大利数学家Volterra(1923年)解释鱼群变化规律和美国种群学家Lotka(1921年)在研究化学反应时提出。

一类食饵-捕食模型的稳定性和Hopf分岔引言:食物链是自然界中生物互相作用的重要方面之一,而食饵-捕食模型是描述这种互相作用的数学模型之一。
在这类模型中,食饵是指养分来源,捕食者则以食饵为食。
在这篇文章中,我们将探究现象。
一、模型的建立假设食饵种群的增长率与其种群大小成正比,而捕食者种群的增长率与食饵种群大小和捕食者种群大小成正比。
以t表示时间,x(t)和y(t)分别表示食饵种群和捕食者种群的大小,则该模型的数学表达式如下:dx/dt = ax - bxydy/dt = cxy - dy其中,a、b、c和d为常数,分别表示食饵种群的增长率、食饵种群遭到捕食者捕食的速率、食饵被捕食后被转化为捕食者的速率和捕食者种群的死亡率。
二、平衡点的分析平衡点是指在一段时间内,系统中各个种群的大小保持不变的状态。
在我们的模型中,稳定的平衡点应该满足以下条件: dx/dt = 0 => ax - bxy = 0dy/dt = 0 => cxy - dy = 0由以上两个方程可以解得平衡点为:(x*, y*) = (d/c,a/b)。
当系统处于平衡点时,食饵和捕食者种群的大小不再发生变化。
三、线性稳定性分析为了探究平衡点的稳定性,我们需要对系统进行线性稳定性分析。
假设系统在平衡点周边有微小的扰动,即令(x, y) = (x* + ε, y* + δ),其中ε和δ为很小的变量。
将这个微小扰动代入模型的微分方程中,可以得到以下近似方程:dε/dt = (a - b(y* + δ))εdδ/dt = (c(x* + ε)y* - d)δ通过对近似方程进行线性化,可以得到雅可比矩阵:J = | a - by* -bx* || cy* cx* - d|其中,x*和y*为平衡点的坐标。
依据线性稳定性理论,平衡点(x*, y*)是稳定的当且仅当雅可比矩阵的全部特征值具有负实部。
四、Hopf分岔的分析除了探究系统的稳定性外,我们还关注系统是否存在Hopf分岔现象。
两类食饵—捕食者模型的稳定性分析两类食饵—捕食者模型的稳定性分析引言生态系统中食物链是一种基本的生态关系,其中包括食饵和捕食者之间的相互作用。
食饵-捕食者模型是用来描述食饵和捕食者之间相互作用关系的数学模型。
在自然界中存在不同类型的食饵-捕食者模型,其中一种常见的模型是“两类食饵—捕食者模型”。
本文将对该模型的稳定性进行分析。
一、模型描述这个模型中包括两类食饵和一个捕食者。
我们用 V1, V2 分别表示两类食饵的个体数量,用 P 表示捕食者的个体数量。
模型可以由以下方程组描述:(1)dV1/dt = r1V1(1 - V1/K1) - a1V1P(2)dV2/dt = r2V2(1 - V2/K2) - a2V2P(3)dP/dt = b1a1V1P - m1P + b2a2V2P - m2P其中,r1和r2分别表示两类食饵的增长率,K1和K2表示它们的环境容量;a1和a2是食饵和捕食者之间的捕食率;b1和b2分别是捕食者每次捕食时所消耗的食饵个体数量;m1和m2分别表示捕食者的自然死亡率。
二、平衡点的求解平衡点是指系统中各个物种个体数量不发生变化的状态。
我们令方程组(1)-(3)中各个方程等于零,解得平衡点:V1* = 0;V2* = 0;P* = 0这是一个零平衡点,表示所有个体数量均为零。
三、稳定性的分析我们需要分析模型中平衡点的稳定性,以了解该模型的动态行为。
1. 线性稳定性分析为了方便分析,我们将模型(1)-(3)化为线性形式:(4)dV1/dt = (r1 - a1P)V1(5)dV2/dt = (r2 - a2P)V2(6)dP/dt = (b1a1V1 + b2a2V2 - m1 - m2)P对于线性系统(4)-(6),可以利用特征值的方法进行分析。
计算特征值后得到系统的特征方程:λ^3 + (m1 + m2 - b1a1V1* - b2a2V2*)λ^2 + (a1a2P* - (r1 + r2 + m1 + m2))λ + a1a2P*(r1 + r2) = 0通过分析特征方程的根的实部和虚部,可以判断平衡点的稳定性。
食饵-捕食者模型参数拟合方法王福昌;张丽娟;靳志同【摘要】食饵-捕食者模型是生物数学研究中一类重要的模型,但依据观测数据对模型参数进行估计的研究较少,不利于模型的广泛应用.以雪兔和猞猁数据和食饵-捕食者模型为例,给出了使用MATLAB估计模型参数的方法和结果分析.通过文献比较,验证了所提出方法的正确性和有效性.【期刊名称】《高师理科学刊》【年(卷),期】2017(037)011【总页数】4页(P6-9)【关键词】食饵-捕食者模型;参数拟合;最优化方法;MATLAB【作者】王福昌;张丽娟;靳志同【作者单位】防灾科技学院基础部,河北三河 065201;防灾科技学院基础部,河北三河 065201;防灾科技学院基础部,河北三河 065201【正文语种】中文【中图分类】O193;O241在生物数学中,食饵-捕食者模型由于其应用广泛而成为一类重要的2种群动力学经典生物数学模型.关于它的各种改进、稳定性理论和数值模拟研究很多[1-2],但是对其反问题,即依据实际观测数据估计模型各个参数的研究较少或者参数估计方法比较复杂[3-8],不利于工程人员掌握和模型的应用.本文基于广大工程人员熟悉的通用科学计算软件MATLAB强大的优化计算功能,以雪兔和猞猁观测数据和食饵-捕食者模型为基础进行讨论,给出了依据部分观测数据估计食饵-捕食者数学模型中参数的方法,并通过计算机仿真和与文献的比较,检验了所提出方法的正确性.食饵-捕食者模型是一种常见的非线性常微分方程组,以雪兔和猞猁数据为例,设t时刻雪兔和猞猁的数量分别为H(t)和L(t),建立食饵-捕食者模型为其中:为待估参数.还可以给出模型来描述雪兔和猞猁的变化关系,其中:为待估参数.不同研究者根据不同假设给出了各种非线性模型,可以类似地研究.一般地,在给出模型后,就可以求出其平衡点,研究其稳定性等理论性质.本文研究其反问题,即根据雪兔和猞猁的观测数据拟合模型参数,从而研究雪兔和猞猁的演化规律.假定为观测到的雪兔和猞猁数据,为得到模型中参数的最优估计,建立优化模型其中:为待估向量;为雪兔在ti时刻的预测值;为猞猁在ti时刻的预测值.本文的目标是不断优化参数p,使预测值和观测值之间的误差平方和最小.2.1.1 微分方程的数值解法由于非线性方程组一般没有解析解,因此,对于微分方程组(1)和微分方程组(2),给定参数估计值后,需要利用数值方法才能得到预测值.可以采用MATLAB自带的ode23()或者ode45(),也可以自己编写程序进行数值求解.2.1.2 目标函数设计当数据中异常值较少时,使用最小二乘准则效率较高;当数据中包含较多异常点时,使用最小二乘准则得到的估计参数不可靠,这时应使用稳健准则,如最小一乘、T-型估计和截断估计准则等.2.1.3 优化方法的选取给定目标函数(如式(3))后,即可使用优化方法得到参数估计值,通常有2类算法可以使用,一种是基于梯度的算法,如信赖域法、Gauss-Newton迭代和BFGS算法等,这类算法的优点是计算速度快,缺点是无法处理梯度不存在的情形;另一类是无梯度算法,如直接搜索、Nelder-Mead单纯形算法和启发式优化算法(GA,PSO,DE等).Mathworks公司网站的matlab central/fileexchange目录下可以查到各种算法非常丰富的优化工具箱,可以选择多种算法测试,选择最好的结果.一般参数较少时,用MATLAB自带的优化方法即可很好地解决问题,如要求目标函数可导的fiminunc()和不需目标函数可导的fminserach()和ga()等.另外,根据实际意义,可以确定参数的大概范围,从而提高寻优的效率.MATLAB是一种强大的通用科学计算软件,优化计算功能强大,利用MATLAB可以很容易地进行参数估计.2.2.1 算法设计算法设计的基本步骤为:Step1 设置优化算法参数,设定估计参数初值或取值范围;Step2 构造目标函数,一般采用最小二乘准则,当数据中有异常值较多时,可用稳健准则[7]21.计算预测值时,一般需要使用微分方程数值解法.Step3 优化目标函数,根据目标函数特点,选择合适的优化算法,求得最优的参数估计值.2.2.2 MATLAB程序设计设计模型(1)的MATLAB程序,编写优化的模型函数和优化目标函数.在给定目标函数后,就可以代入数据编写主程序,并对结果可视化.根据美国黄石国家公园的雪兔和猞猁的记录数据和模型(1),拟合出最优参数.然后根据估计参数计算出从1900—1930年间的雪兔和猞猁数量的连续变化曲线.计算的主程序为:程序代码中用模型(1)、微分方程求解器ode23()和最小二乘准则(LS)建立目标函数,使用Nelder-Mead单纯形算法求解器fminsearch()优化目标函数.若把拟合准则修改为最小一乘(LAD),可以得到相应的拟合结果(见表1).由表1可以看出,最小二乘LS和最小一乘LAD2种准则下的参数估计差距不大.根据拟合参数值,可以求得对应微分方程组模型的数值解,绘制出观测数据和拟合曲线图形(见图1~2).本文给出了一类2种群食饵-捕食者模型的非线性微分方程组参数估计方法,并给出相应的MATLAB源程序,使用者稍加修改,即可得到自己模型的参数估计.同样方法,通过对模型(2)进行参数估计,得到的拟合曲线与模型(1)的结果极其相近.如果数据中出现异常值(Outliers),可以采用稳健的准则进行处理,修改拟合误差目标函数,算法不变,只不过选择优化算法时需要相应的改变,如式(3)不可导时,只能用Nelder-Mead单纯形算法类的无需导数的优化搜索算法.【相关文献】[1]Brauer F,Castillo-Chavez C.Mathematical Models in Population Biology and Epidemiology[M].Heidelberg:Springer-Verlag,2000[2]王运松,彭娜,徐世英.十一星瓢虫与蚜虫数量关系的种群动力学研究[J].中央民族大学学报:自然科学版,2011,20(3):65-68[3]徐文科,刘洋.捕食与被捕食者种群似乎不相关模型的参数估计[J].黑龙江大学自然科学学报,2013(5):570-575[4]Ramsay J O,Hooker G,Campbell D,et al.Parameter estimation for differential equations:a generalized smoothing approach[J].Journal of the Royal Statistical Society B,2007,69(5):741-796[5]Campbell D A,Chkrebtii O.Maximum profile likelihood estimation of differential equation parameters through model based smoothing state estimates[J].Mathematical Biosciences,2013(2):283-292[6]Muller T G,Timmer J.Fitting parameters in partial differential equations from partially observed noisy data[J].Physica D Nonlinear Phenomena,2002(1):1-7[7]Hu T,Qiu Y P,Cui H J.Robust estimation of constant and time-varying parameters in nonlinear ordinary differential equation models[J].Journal of Nonparametric Statistics,2015,27(3):1-23[8]翁瑾.基于数值微分的两种群食饵—捕食者模型的参数估计及其性质的研究[D].南昌:南昌大学,2010。
具有恐惊效应的捕食者-食饵模型的稳定性和Hopf分支摘要:在生态学探究中,捕食者-食饵模型是一种常见的模型,用于探究捕食者和食饵之间的互相作用。
然而,有些状况下,食饵可能对捕食者具有恐惊效应,即食饵在觉察到捕食者的存在后会缩减其行动活动。
本文通过建立一个具有恐惊效应的捕食者-食饵模型,探讨了模型的稳定性和Hopf分支,以及恐惊效应对模型的影响。
关键词:恐惊效应,捕食者-食饵模型,稳定性,Hopf分支引言:在生态系统中,捕食者和食饵的互相作用对于维持生态平衡起着重要作用。
捕食者通过捕食食饵维持自身的生存,而食饵则通过防止或避开捕食者的攻击来提高自己的存活率。
然而,在一些状况下,食饵可能会遇到捕食者后丢失正常的行动活动,这种现象被称为恐惊效应。
恐惊效应的存在对于生态系统的稳定性以及捕食者-食饵模型的行为产生了重要的影响。
模型表述:我们思量一个简化的捕食者-食饵模型,其中食饵种群的动态由以下方程描述:$\frac{dF}{dt} = rF(1-\frac{F}{K}) - \alpha\frac{F}{P+PL}P$其中,$F$表示食饵种群的数量,$r$为食饵增长率,$K$为食饵种群的环境承载力,$P$表示捕食者种群的数量,$\alpha$是捕食者对食饵的捕食率,$L$代表食饵感知到捕食者的程度。
当$L$为0时,表示食饵没有感知到捕食者的存在;而当$L$较大时,食饵感知到捕食者的存在,会缩减其行动活动。
捕食者种群的动态由以下方程描述:$\frac{dP}{dt} = \beta \frac{F}{P_c + F}P - \gamma P$ 其中,$P$表示捕食者种群的数量,$\beta$是食饵对捕食者的增长率,$P_c$表示捕食者的投放数量,$\gamma$为捕食者的死亡率。
模型分析:为了探究模型的稳定性和Hopf分支,我们起首将模型的动态转化为无量纲形式。
假设$F = Kx$,$P = P_c y$,$t =\frac{1}{r} \tau$,将模型方程进行无量纲化后,可以得到: $\frac{dx}{d\tau} = x(1-x) - \mu \frac{x}{p +pL}y$$\frac{dy}{d\tau} = \frac{x}{p + x}y - y$其中,$\mu = \frac{\alpha K}{r}$,$p =\frac{P_c}{K}$。
具有扩散的捕食者-食饵模型的动力学行为具有扩散的捕食者-食饵模型的动力学行为摘要:捕食者-食饵模型是生态学中研究捕食者和食饵种群相互作用的经典模型之一。
在实际生态系统中,捕食者和食饵种群常常存在地理空间上的扩散,并且扩散过程对模型动力学行为产生重要影响。
本文通过建立具有扩散的捕食者-食饵模型,研究了扩散对模型行为的影响,并通过数值模拟得到了一些有意义的结果。
关键词:捕食者-食饵模型;扩散;动力学行为;数值模拟1. 引言生态系统中的捕食者-食饵相互作用是生态学中的重要研究领域之一。
捕食者和食饵种群之间的相互作用可以对生态系统的稳定性和物种多样性产生重要影响。
为了研究这种相互作用,许多数学模型被提出,其中最经典的是Lotka-Volterra捕食者-食饵模型。
2. 捕食者-食饵模型Lotka-Volterra捕食者-食饵模型是由两个常微分方程组成。
假设食饵种群的增长率与捕食者种群的消耗率成正比,而捕食者的增长率与食饵种群的捕食率成正比。
基本的模型方程可以写为:$$\frac{dV}{dt} = rV - cVW$$$$\frac{dW}{dt} = pVW - dW$$其中,V和W分别代表捕食者和食饵种群的数量,r、c、p和d分别代表增长率、捕食率、食饵种群的增长率和捕食者的死亡率。
3. 添加扩散过程然而,在实际生态系统中,捕食者和食饵种群往往存在地理空间上的分布。
为了更真实地描述这种情况,我们需要在模型中加入扩散过程。
假设捕食者和食饵可以通过扩散来占据新的空间和利用新的资源,模型方程可以调整为:$$\frac{dV}{dt} = rV - cVW + D_v \nabla^2 V$$ $$\frac{dW}{dt} = pVW - dW + D_w \nabla^2 W$$其中,D_v和D_w分别代表捕食者和食饵的扩散系数,而\nabla^2代表拉普拉斯算子。
4. 数值模拟结果为了研究这个具有扩散的捕食者-食饵模型的动力学行为,我们进行了一系列数值模拟实验。
生态系统中两种群的捕食者-食饵系统的研究的开题报告一、问题生态系统中的两种群之间的捕食者-食饵系统是生态学中的一个重要问题。
这种系统中,捕食者在食饵种群中选取猎物,在捕猎的过程中,猎物的数量会减少,捕食者的数量则会增加。
同时,捕食者对猎物的捕捉也会对猎物种群的适应性产生影响,使其在漫长的进化过程中不断适应捕食者的选择压力。
在生态系统中,捕食者和食饵之间的关系丰富多样,因此研究二者之间的相互作用对于理解生物群体的动态变化和演化规律具有重要价值。
二、研究内容本研究旨在研究生态系统中的两种群之间的捕食者-食饵系统,主要涉及以下内容:1.建立生态模型。
2.利用模型模拟捕食者和食饵的数量变化。
3.分析捕食者对猎物种群适应性的影响。
4.通过模拟结果,探讨生态系统中的捕食者和食饵的相互作用规律。
三、研究方法本研究将利用数学模型和计算机模拟方法来分析生态系统中的捕食者-食饵系统。
在模型中,将考虑捕食者、食饵和环境等因素的影响,以及生物之间的相互作用。
通过调整不同参数,以模拟不同情况下捕食者-食饵系统的变化。
同时,将利用统计学方法对模拟结果进行分析,以评估捕食者对猎物种群适应性的影响。
四、研究意义本研究可以深入了解生态系统中捕食者-食饵系统的动态演变过程,有助于为保护生态环境和物种多样性提供科学依据。
此外,研究结果还可为农业生产提供参考,以维持农业生产的可持续性。
五、结论本研究将着重探讨生态系统中的捕食者-食饵系统,以期可以更全面、深入地了解该系统的规律和机制。
六、参考文献1. Begon, M., Harper, J.L., and Townsend, C.R. (1996). Ecology: Individuals, Populations, and Communities. Blackwell Science Ltd.2. Berryman, A.A. (2002). Population Cycles: The Case for Trophic Interactions. Oxford University Press.3. May, R.M. (1973). Stability and Complexity in Model Ecosystems. Princeton University Press.4. Murdoch, W.W., Briggs, C.J., and Nisbet, R.M. (2003). Consumer-Resource Dynamics. Princeton University Press.5. Pimm, S.L. (1980). Theoretical Ecology. Blackwell Science Ltd.。
洛必达法则的一些应用洛必达法则(Lotka-Volterra equations),也称为捕食-食饵模型,是对生态系统中捕食者和食饵之间相互作用关系的数学描述。
它由阿尔弗雷德·洛特卡(Alfred J. Lotka)和瓦尔特·福尔泰拉(Vito Volterra)于1920年代提出,成为生态学的重要理论基础之一、洛必达法则主要用于揭示生态系统中捕食者和食饵之间相互依赖和相互制约的关系,对生物多样性和生态平衡研究有着重要意义。
dx/dt = αx - βxydy/dt = δxy - γy其中,x表示食饵的种群数量,y表示捕食者的种群数量,t表示时间。
α、β、δ和γ分别表示捕食者对食饵的增长率、食饵被捕食的速率、捕食者的死亡率和食饵的自然增长率。
这个模型假设捕食者和食饵之间不存在其他相互作用。
1.解释捕食者-食饵动态:洛必达法则可以用来解释捕食者和食饵之间的种群动态变化。
当食饵的数量增多时,捕食者的数量也会相应增多;而当捕食者的数量增多时,食饵的数量会减少。
这种反馈机制使得捕食者和食饵之间能够达到一种相对平衡的状态。
2.研究生物多样性:洛必达法则可以用来研究生态系统中不同物种之间的相互作用和竞争关系。
通过观察捕食者和食饵的数量变化,可以了解不同物种对资源的利用和竞争情况,从而揭示生态系统的物种组成和多样性。
3.预测和控制生态系统变化:洛必达法则可以通过数学模拟来预测生态系统的变化趋势。
通过改变模型中的参数值,可以模拟不同环境条件下捕食者和食饵之间的相互作用,进而预测生态系统的稳定性和可持续性。
4.生物害虫防治:洛必达法则在农业害虫防治中有重要应用。
通过研究害虫与天敌(捕食者)之间的相互关系,可以选择合适的天敌进行生物防治,控制害虫数量从而减少农药使用。
5.环境保护和生态恢复:洛必达法则可以用来评估生态系统遭受破坏后的恢复能力。
通过研究捕食者和食饵之间的动态变化,可以了解恢复过程中物种之间的相互关系和依赖程度,从而指导生态恢复工作。