整理安川伺服电机参数基本调整
- 格式:doc
- 大小:30.05 KB
- 文档页数:6
安川伺服参数设定说明一、参数设置前的准备工作在进行参数设定之前,我们需要先了解一些基本的概念和参数含义,以便更好地理解和应用参数。
1.1速度环和位置环安川伺服驱动器中有两个重要的环称为速度环和位置环。
速度环控制驱动器的速度输出,而位置环控制驱动器的位置输出。
1.2速度环参数a)P增益:是速度环的比例增益,用于调节速度环的灵敏度。
b)I增益:是速度环的积分增益,用于调节速度环的稳定性。
c)D增益:是速度环的微分增益,用于调节速度环的响应速度。
1.3位置环参数a)P增益:是位置环的比例增益,用于调节位置环的灵敏度。
b)I增益:是位置环的积分增益,用于调节位置环的稳定性。
c)D增益:是位置环的微分增益,用于调节位置环的响应速度。
二、参数设定步骤进行安川伺服参数设定的一般步骤如下:2.1设置速度环参数a)调整P增益:从一个较小的值开始逐渐增大,直到达到理想的速度响应。
b)调整I增益:从一个较小的值开始逐渐增大,直到达到理想的速度稳定性。
c)调整D增益:根据实际应用需求进行微调,以达到更好的速度控制效果。
2.2设置位置环参数a)调整P增益:从一个较小的值开始逐渐增大,直到达到理想的位置响应。
b)调整I增益:从一个较小的值开始逐渐增大,直到达到理想的位置稳定性。
c)调整D增益:根据实际应用需求进行微调,以达到更好的位置控制效果。
2.3保存参数在完成参数设定后,需要将参数进行保存,以便下次使用时可以直接加载使用。
三、注意事项在进行安川伺服参数设定时,需要注意以下几点:3.1应用类型选择根据实际应用需求选择伺服驱动器的应用类型,包括位置控制、速度控制和力矩控制等。
3.2参数范围设置根据实际系统的特点和要求,设置参数的合理范围,避免参数设定过大或过小导致的系统不稳定。
3.3参数调整顺序在进行参数调整时,一般先调整速度环参数,再调整位置环参数。
因为速度环是位置环的基础,速度环参数设定好后再进行位置环参数的调整会更加方便和稳定。
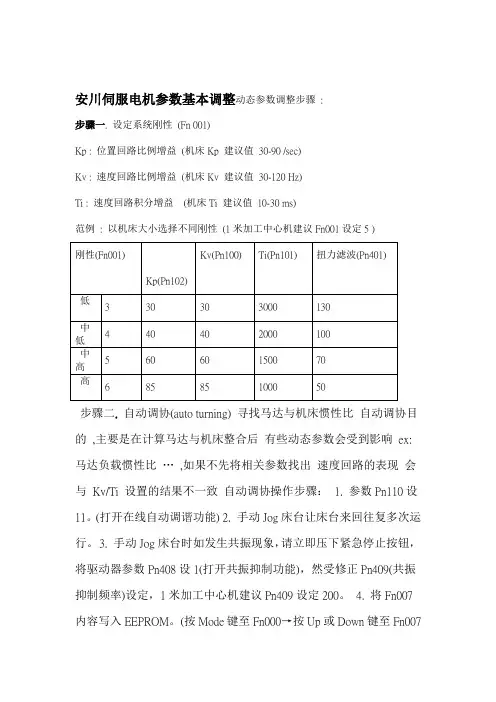
安川伺服电机参数基本调整动态参数调整步骤:步骤一. 设定系统刚性(Fn 001)Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec)Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz)Ti : 速度回路积分增益(机床Ti 建议值10-30 ms)范例: 以机床大小选择不同刚性(1米加工中心机建议Fn001设定5 )步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比…,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。
(打开在线自动调谐功能) 2.手动Jog床台让床台来回往复多次运行。
3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。
4.将Fn007内容写入EEPROM。
(按Mode键至Fn000→按Up或Down键至Fn007→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM)5.参数Pn110设12。
(关闭在线自动调谐功能) 步骤三. 起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率)马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 .步骤四. 将速度回路增益参数再调高就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量YASKAWA伺服參數設定說明:备注: 1、带* 为驱动器必须设定的参数,马达才能正常运转!2、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:伺服电机编码器类型的回授脉冲数327682比特17中设所需精度单位)通常新代控制器所设精度单位1um/Pules (可在系统参数17倍(可在系统参数通常新代控制器所设的倍频数是4 81~100中所设轴卡的倍频)计算公式:负载转一圈移动量脉÷( 4 ××M﹞﹝编码器的脉冲数电子齿轮比Pn202 / Pn203 =N )×冲数N是指马达和工作台传动侧的机械齿轮比M和控马达转一圈回授的脉冲数新代系统参数61~63 = Pn201 = 负载转一圈移动量脉冲数÷制器内部所设的倍频4************ ex:比特采用直传连轴器C 10mm 当螺杆的节距是马达选用型17 那齿轮比计算如下:4 Pules = 负载转一圈移动量脉冲数10mm÷1um/Pules =10M / N = 1 / 1 4 8192 / 625 = ÷(10×1 ) 4Pn202 / Pn203 = (32768××1 )4 2500 Pules 4 = Pn201 = 10 ÷为上面公式根据实际情、Pn203Pn202、设定上表中的驱动器参数,值为后面的设定值;2 Pn201、、况计算出来的值;Pn100、Pn101Pn102先不修改数值,为出厂值;数值Fn001Z 轴的来回运动,通过增大驱动器参数值,按加1Y3、调整机台的刚性,先进行X、、ZY、增大;通常调节到机台出现震动或有声音后,降回原一级。
安川伺服电机参数基本调整安川伺服电机是一种常见的电机控制设备,广泛应用于机械设备中。
在使用过程中,需要根据具体的应用需求对伺服电机的参数进行基本调整,以实现更好的运动性能和控制效果。
下面将介绍一些常见的安川伺服电机参数基本调整方法。
1.转矩限制参数调整:转矩限制参数是指电机在运行中所能输出的最大转矩。
根据实际需求,可以适当调整转矩限制参数,以达到所需的运动效果。
一般来说,如果转矩限制设置得过大,容易导致电机过载;而设置得过小,则可能无法满足实际应用需求。
因此,在进行参数调整时,需要根据具体应用场景进行合理设置。
2.速度限制参数调整:速度限制参数是指电机在运行中所能达到的最大速度。
在使用伺服电机时,常常需要对其运动速度进行控制,以满足实际需求。
通过调整速度限制参数,可以控制电机的最大速度。
一般来说,速度限制设置得过大,可能会导致电机运行不稳定;设置得过小,则无法满足实际要求。
因此,在进行参数调整时,需要综合考虑电机的性能和实际需求。
3.比例增益参数调整:比例增益是伺服电机控制中的重要参数,用于控制电机响应速度和稳定性。
在进行比例增益参数调整时,需要注意以下几点:首先,增益设置得太小,可能会导致电机响应迟钝;设置得太大,则容易导致电机振荡或不稳定。
其次,在调整时应尽量使电机响应速度和运动稳定性达到一个合理的平衡。
最后,比例增益参数一般需要根据具体应用需求进行调整。
4.调整滤波时间常数参数:滤波时间常数参数是伺服电机控制中的一个重要参数,用于抑制电机输出信号的高频噪声。
在进行滤波时间常数参数调整时,需要注意以下几点:首先,滤波时间常数设置得过小,可能会导致电机输出信号的噪声没有得到有效抑制;设置得过大,则会影响电机的运行性能。
其次,应根据具体应用需求进行合理调整,以满足实际要求。
5.调整位置环参数:位置环是伺服电机控制中的一个重要环节,用于实现位置的准确控制。
在进行位置环参数调整时,需要注意以下几点:首先,位置环控制的稳定性对电机性能影响较大,因此在设置参数时应尽量提高稳定性。
安川伺服参数设定首先,通常需要进行的参数设定包括:电机参数、控制模式、速度控制参数、位置控制参数、力矩控制参数等。
这些参数的具体设定方法可能会因不同的安川伺服驱动器型号而有所不同,所以在进行参数设定时一定要仔细查阅相关的设备手册和技术资料,并根据实际情况进行调整。
在设定安川伺服参数时,一般需要通过电脑连接伺服驱动器的调试口进行操作。
需要注意的是,这一步骤需要有专业的技术人员进行操作,以避免错误或损坏设备。
接下来,需要根据实际应用的要求进行参数调整。
例如,如果需要进行速度控制,则需要设定速度环控制参数,包括速度环增益、速度环带宽等;如果需要进行位置控制,则需要设定位置环控制参数,包括位置环增益、位置环带宽等。
在进行参数设定时,需要根据实际情况进行试验和调整。
可以通过改变参数的值,观察伺服驱动器的响应和输出,以确定参数的合理范围和最佳值,并实现所需的运动控制效果。
此外,在进行安川伺服参数设定时,还需要注意以下几个方面:1.起步操作:在设定参数之前,需要先进行伺服驱动器的起步操作,包括电机的接线、电源的连接等。
只有在起步操作正确完成后,才能进行参数设定。
3.参数保存和备份:在设定完参数后,一定要将参数保存和备份,以便在需要时可以恢复到之前的参数设定。
可以通过将参数导出到电脑或使用参数备份器等方式进行保存和备份。
4.参数调整和优化:参数设定不是一次性的工作,在实际应用中可能需要多次调整和优化。
可以根据实际需求进行参数调整,满足不同应用场景的要求。
总结起来,安川伺服参数设定是一个比较复杂和技术含量较高的工作,需要有一定的专业知识和经验。
在进行参数设定时,要仔细查阅设备手册和技术资料,进行试验和调整,并注意保存和备份参数。
只有经过正确的参数设定,伺服驱动器才能正常运行并满足实际应用的要求。
安川伺服里面有很多个全参数但是其中只有几个全参数需要调安川伺服里面有很多个参数但是其中只有几个参数需要调:Pn100 Pn101Pn102 Pn103Pn401 Pn110Pn000Pn200 Pn201 Pn202 Pn203 Pn50A其中Pn100 Pn101 Pn102受到Fn001刚性的控制,一般情况下刚性调到5那么速度增益,位置增益,积分时间就自动调好了将Pn110调到0运动机器那么Fn007里面就会出现机器的惯量把惯量放到Pn103里就可以了Pn200=n.0004Pn201=2500Pn202=32768Pn203=2500Pn50A=n,8100Fn001为机械刚性Pn100为速度增益Pn101为速度积分时间Pn102为位置增益Pn401为扭矩滤波器时间当Fn001动了之后Pn100 Pn101 Pn102就会一起动Pn110为自动调谐,调谐的是Pn103积分比,驱动器会将积分比储存到Fn007中Pn200为指令脉冲形态Pn201为PG分频比设定Pn202为电子齿轮比分子Pn203为电子齿轮比分母Pn50A为输入信号选择1 安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。
Pn000 功能选择n.0010(设定值) 第0位:设定电机旋转方向;设“1”改变电机旋转反向。
第1位:设定控制方式为:“1”位置控制方式。
Pn200 指令脉冲输入方式功能选择n.0101(设定值) “1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型) Pn202电子齿轮比(分子)Pn203 电子齿轮比(分母)根据不同螺距的丝杆与带轮比计算确定,计算方法如下:Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000参数设置范围: 1/100≤分子/分母≤100注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。
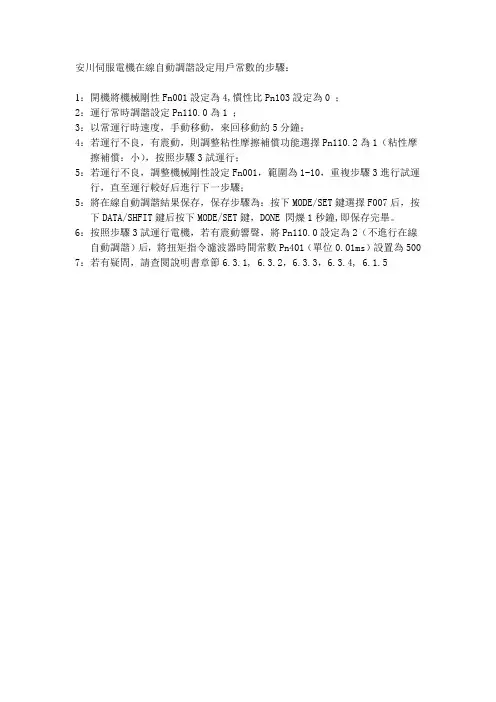
安川伺服電機在線自動調諧設定用戶常數的步驟:
1:開機將機械剛性Fn001設定為4,慣性比Pn103設定為0 ;
2:運行常時調諧設定Pn110.0為1 ;
3:以常運行時速度,手動移動,來回移動約5分鐘;
4:若運行不良,有震動,則調整粘性摩擦補償功能選擇Pn110.2為1(粘性摩擦補償:小),按照步驟3試運行;
5:若運行不良,調整機械剛性設定Fn001,範圍為1-10,重複步驟3進行試運行,直至運行較好后進行下一步驟;
5:將在線自動調諧結果保存,保存步驟為:按下MODE/SET鍵選擇F007后,按下DATA/SHFIT鍵后按下MODE/SET鍵,DONE 閃爍1秒鐘,即保存完畢。
6:按照步驟3試運行電機,若有震動響聲,將Pn110.0設定為2(不進行在線自動調諧)后,將扭矩指令濾波器時間常數Pn401(單位0.01ms)設置為500 7:若有疑問,請查閱說明書章節6.3.1, 6.3.2,6.3.3,6.3.4, 6.1.5。
安川伺服里面有很多个参数但是其中只有几个参数需要调:Pn100 Pn101Pn102 Pn103Pn401 Pn110Pn000Pn200 Pn201 Pn202 Pn203 Pn50A其中Pn100 Pn101 Pn102受到Fn001刚性的控制,一般情况下刚性调到5那么增益,位置增益,积分时间就自动调好了将Pn110调到0运动机器那么Fn007里面就会出现机器的惯量把惯量放到Pn103里就可以了Pn200=n.0004Pn201=2500Pn202=32768Pn203=2500Pn50A=n,8100Fn001为机械刚性Pn100为增益Pn101为积分时间Pn102为位置增益Pn401为扭矩滤波器时间当Fn001动了之后Pn100 Pn101 Pn102就会一起动Pn110为自动调谐,调谐的是Pn103积分比,驱动器会将积分比储存到Fn007中Pn200为指令脉冲形态Pn201为PG分频比设定Pn202为电子齿轮比分子Pn203为电子齿轮比分母Pn50A为输入信号选择1安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。
Pn000 功能选择 n.0010(设定值) 第0位:设定电机旋转方向;设“1”改变电机旋转反向。
第1位:设定控制方式为:“1”位置控制方式。
Pn200 指令脉冲输入方式功能选择 n.0101(设定值) “1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型)Pn202电子齿轮比(分子)Pn203 电子齿轮比(分母)根据不同螺距的丝杆与带轮比计算确定,计算方法如下:Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000参数设置范围: 1/100≤分子/分母≤100注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。
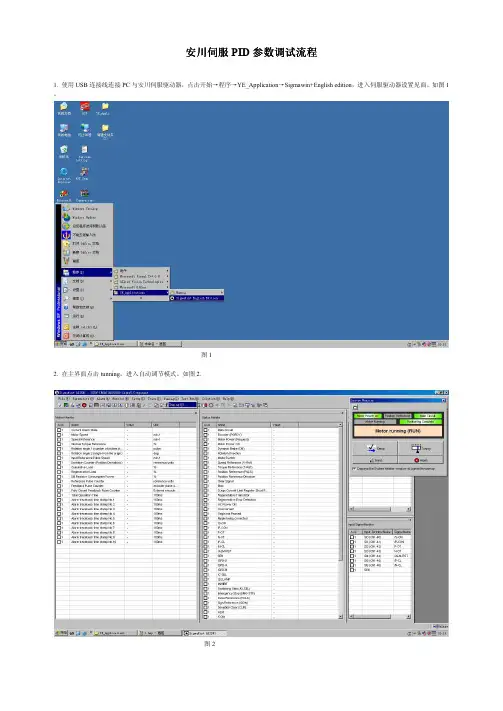
安川伺服PID参数调试流程1. 使用USB连接线连接PC与安川伺服驱动器,点击开始→程序→YE_Application→Sigmawin+English edition,进入伺服驱动器设置见面。
如图1 。
图12. 在主界面点击tunning,进入自动调节模式。
如图2.3.点击执行按钮,进入惯性调试界面,如图4所示,使用默认设置,点击NEXT,进入下一界面。
如图5所示。
图44.在图5界面,点击START ,再点击NEXT进入下一界面。
注意该步由于电机会自行运动距离,所以在运动前,需要确定电机在运动轴的中间位置。
图55.点击Servo On按钮,再交替点击Forward按钮和Reverse按钮,电机会进行正反运动,将会对机械惯量进行自动计算。
完成以后,两个按钮变灰,不能使用,在右下角将会显示计算出来的新的惯量值。
点击NEXT,进入下一步设置。
如图6所示图66. 在图7所示界面,点击writing result,把惯量参数写驱动器。
图77. 写入完成,将进入如下界面。
如图8所示,点击选择NO reference input选项,再点击AUTOTUNING按钮,进入下一步调试。
图88. 如图9所示,在distance框下,设置运动范围,默认为24*1000,当确定运行距离足够大的时候保持默认值,当运行距离小于该值的时候,请设置该值到20*1000,并勾选TUNING PARAMETERS框的选项。
点击下一步。
图99. 点击Servo ON,再点击Start tuning,伺服运动系统将在一定距离上来回运动,整过过程电机可能发出震动的噪音,为正常现象,自动调整完成后,点击finish,参数将自动写入驱动器。
如图10所示。
图1010. 当参数不满足性能要求的时候,点击parameters→edit parameters,从驱动器下载参数显示界面,如图11所示。
图1111.根据情况调整参数pn100,pn101,pn102,pn103,如图12所示,具体参数意义及调整方法见下面说明。
安川伺服参数设定一、伺服参数设定的目的和重要性伺服参数设定的目的是通过调整伺服驱动器的参数,使驱动器能够更好地与传动机构和机械装置配合,确保系统的动态响应和控制精度,提高工作效率和精度。
伺服参数设定是伺服系统调试和性能优化的关键步骤,对于确保系统的正常运行和提高生产效率具有重要意义。
二、伺服参数设定的方法和步骤伺服参数设定的方法和步骤主要包括以下几个方面:1.前期工作准备在开始伺服参数设定之前,需要清楚地了解伺服系统的工作原理和性能要求。
同时,需要对伺服驱动器和伺服电机进行正确的接线和配置,确保驱动器和电机之间的通信和控制有效。
2.系统标定系统标定是指通过对伺服系统进行一系列测试和数据采集,获取系统的动态响应特性和传动机构的静态特性。
常见的系统标定参数包括位置环、速度环、加速环等。
3.参数优化通过对系统标定数据的分析和处理,可以优化伺服系统的参数,使其能够更好地适应实际应用需求。
参数优化主要包括位置环增益、速度环增益、加速环增益等。
4.参数设定在参数优化的基础上,根据具体应用需要,对伺服驱动器进行参数设定。
参数设定主要包括电机参数(如极数、电机额定转矩、电机最大转速等)、速度环参数(如速度环增益、速度环带宽等)、位置环参数(如位置环增益、位置环带宽等)。
5.测试和调试在完成伺服参数设定之后,需要对系统进行全面的测试和调试,以确保系统的性能和稳定性。
测试和调试主要包括对系统的速度响应、位置跟踪精度、扭矩输出等方面进行检验。
三、伺服参数设定的注意事项在进行伺服参数设定的过程中,需要注意以下几个方面:1.合理选取参考值在设定伺服参数时,需要根据实际应用需求合理选择参考值,确保系统能够达到预期性能。
参考值过小或过大都可能导致系统出现不稳定现象。
2.学习型自整定功能的应用安川伺服驱动器通常具有学习型自整定功能,可以通过学习系统的特性自动调整参数。
在使用学习型自整定功能时,需要确保系统运行在典型的工作状态下,避免因为特殊状态造成参数的不准确或过于保守。
快速入门安川伺服参数设定安川伺服系统是现代工业自动化领域中常用的一种控制器,它能够精准控制电机的运动,并根据设定的参数进行各种操作。
本文将介绍快速入门安川伺服参数设定的基本步骤和常用方法。
一、安装和连接在进行安川伺服参数设定之前,首先需要确保系统的正确安装和连接。
请按照安川伺服系统的说明书进行安装,并将伺服控制器与电机等设备进行正确连接。
二、伺服参数设定1. 查看参数手册每款安川伺服系统都有相应的参数手册,建议在进行参数设定之前先仔细阅读参数手册,了解不同参数的含义和作用。
参数手册通常会包含参数的编号、名称、默认值以及详细的说明。
2. 进入参数设定模式根据不同的安川伺服系统型号,进入参数设定模式的方法可能会有所不同。
通常,在伺服控制器上按下相应的按钮或使用特定的组合键可以进入参数设定模式。
请参考设备说明书或者参数手册来确定正确的进入方法。
3. 设置基本参数在参数设定模式下,按照参数手册中的说明逐个设置伺服参数。
根据具体的应用需求,可以设置电机的限位、运动方式、速度、加速度等参数。
其中,一些基本的参数包括电机类型、编码器分辨率、转矩限制等。
4. 调整高级参数除了基本参数,安川伺服系统还有一些高级参数可以进行调整。
这些参数包括速度调整、位置修正、滤波器设置等。
需要根据具体应用需求和系统性能来进行适当调整。
5. 保存参数在完成参数设定后,将参数保存到伺服控制器的内存中。
通常,有一个保存参数的选项或者按钮,按下保存后即可将参数写入内存。
这样,在下次启动时,系统将自动加载这些参数。
三、参数调试和优化参数设定完成后,需要进行一些调试和优化,以确保系统的稳定性和性能。
以下是一些常用的调试方法:1. 动态测试通过运行一些基本的测试程序,观察电机的运动情况和响应速度。
可以通过改变参数值,比如速度和加速度,来测试系统的性能。
2. 监测报警信息在参数设定过程中,可能会出现一些警告或错误信息。
请确保监测这些信息,并根据需要进行调整。
安川伺服参数操作器操作方法
安川伺服参数是安川伺服驱动器的设定参数,可以通过操作器进行参数的修改。
下面是安川伺服参数操作器的操作方法:
1. 打开操作器:将操作器插入伺服驱动器的操作器接口,然后打开操作器的电源开关。
2. 进入参数修改模式:按下操作器上的"MODE"按钮,进入参数修改模式。
3. 选择要修改的参数:使用操作器上的"UP"和"DOWN"按钮选择要修改的参数项。
4. 修改参数值:按下操作器上的"RIGHT"按钮,将光标移到参数值的位置,然后使用操作器上的"UP"和"DOWN"按钮进行数值的修改。
5. 确认修改:按下操作器上的"ENTER"按钮,确认修改。
6. 保存参数:在完成所有参数的修改后,按下操作器上的"MODE"按钮退出参数修改模式,然后按下操作器上的"ENTER"按钮,保存修改后的参数。
需要注意的是,在修改安川伺服参数之前,建议先备份原始参数,以免修改错误造成设备损坏。
另外,参数的修改需要根据具体的设备情况和应用需求进行,建
议在有相关经验或指导的情况下进行操作。
安川伺服参数设定说明安川伺服与新代连接参数设定说明注:对于新购买的伺服驱动器,最好先初始化参数。
参数初始化指令(fn005),必须在伺服off的状态下执行,重启生效。
一、安川σ-II系列伺服驱动器参数设置参数编号说明pn000控制模式pn100pn101pn102pn200pn201pn202pn203pn401pn408速度回路增益积分常数位置回路增益初始值设定值00004020004000006050备注0000→速度模式(模拟量指令)0010→位置模式(根据机台实际设定)(根据机台实际设定)1500(根据机台实际设定)0001→正转脉波列+反转脉波列00040004-----a相+b相3000850w 及以上电机(与系统参数61-63一致)(2048)(750w电机)(与系统参数61-63一致)位置控制指令型态0000马达一回转输出脉波数电子齿轮比(分子)电子齿轮比(分母)转矩指今滤波时间参数32768850w及以上电机(1)(750w电机)3000850w及以上电机(1)(750w 电机)建议先使用默认值调试,再根据实际需要做调整建议先使用默认值调试,再根据实际需要做调整共震率波功能000020000000pn409共震率波频率pn50a正转行程极限pn50b 反转行程极限2000建议先使用默认值调试,再根据实际需要做调整2100→打开正转禁止保护功能81008100→关闭正转禁止保护功能8170→伺服内部提供24v654836543→打开反转禁止保护功能6548→关闭反转禁止保护功能设低增益等级做自动调整抓惯量2100fn00165434自动调谐刚性设定二、安川σ-v系列伺服驱动器参数设定参数号:pn000pn00bpn100pn101pn102pn200pn212描述控制模式电源设定速度回路增益速度回路积分时间位置回路增益脉冲命令输入信号类型电机一转输出脉冲数电子齿轮比(分子)初始值设定值0000默认三相402000400000备注00100010→ 位置模式0001→ 三相电源0101→ 单相电源0100(根据机器的实际设置)003.0(根据机器的实际设置)0060(根据机器的实际设置)00040001-----CW+CCW,正逻辑0004-----a相+B相1250850w及以上电机(符合系统参数61-63)(2048)(750W电机)(符合系统参数61-63)pn20e262144850w及以上电机(09系列)(1)(750W电机)(08系列)pn210电子齿轮比(分母)1250850w及以上电机(09系列)(1)(750W电机)(08系列)Pn401pn408pn409扭矩是指滤波时间参数公共地震率波函数公共地震率波频率100000050000,建议先用默认值进行调试,然后根据实际需要进行调整0000,建议先用默认值进行调试,然后根据实际需要调整5000,建议先使用默认值进行调试,然后根据实际需要调整2100→ 打开向前旋转禁止保护功能81008100→ 关闭前向旋转禁止保护功能8170→ 在伺服电机内部提供24v654814006543→ 打开反转禁止保护功能6548→ 关闭反转禁止保护功能,自由调节功能无效,设置有效的pn50a正向旋转行程限制2100pn50bpn170fn001反向旋转行程限制调整自由开关自动调谐刚度设置6543140140003设置自动调整的低增益水平抓取惯性备注:将制动器设置pn50e设置为0000pn50f使用cn1-25/cn1-26输出/bk信号设0100使用cn1-27/cn1-28输出/BK信号设置0200,使用cn1-29/cn1-30输出/BK信号设置0300。
安川伺服的参数设定技巧与注意事项在这篇文章中,我们将探讨安川伺服的参数设定技巧与注意事项。
安川伺服是一种常用的控制系统,广泛应用于工业自动化领域。
正确地设置安川伺服的参数对于提高系统性能和运行稳定性至关重要。
下面我们将介绍几个需要注意的技巧和事项。
一、选择适当的伺服参数1. 转矩参数(Torque Parameters):根据实际应用需求设置伺服的转矩参数。
这些参数包括目标扭矩、增益和补偿等。
需要根据工作负载的特点和性能要求来进行调整,以确保系统的动态响应和稳定性。
2. 速度参数(Velocity Parameters):根据系统的轴速度要求设置伺服的速度参数,包括目标速度、加减速时间和限制值等。
合适的速度参数能够提高伺服系统的响应速度和运动平滑度。
3. 位置参数(Position Parameters):位置参数对于伺服系统的定位控制至关重要。
需要根据工作环境的要求,设置合适的位置参数,包括目标位置、位置偏移和位置补偿等。
正确的位置参数设置可以提高系统的定位精度和重复性。
二、注意事项1. 系统稳定性:在参数设定过程中,需要注意系统的稳定性。
过高的增益值和不合理的参数设置可能导致系统的振荡和不稳定。
因此,应该根据实际情况逐步调整参数,以确保系统的稳定性。
2. 运动平滑度:在高速运动和快速变化的过程中,伺服系统的运动平滑度尤为重要。
合理的速度和加减速时间参数可以改善系统的运动平滑性,减少冲击和振动。
3. 动态响应:伺服系统的动态响应直接影响其控制性能。
适当调整伺服的响应速度和增益参数,可以提高系统的动态响应和控制精度。
4. 负载特性:在参数设定过程中,需要考虑工作负载的特点和变化。
不同的负载特性可能需要不同的参数设置,特别是在负载变化较大的情况下。
因此,应该根据实际负载情况进行参数调整。
5. 保护设置:在设置伺服参数时,要注意合理设置保护参数,以防止过流、过热和过载等问题。
这些保护参数可以保护伺服系统免受意外故障的影响,延长系统的寿命。
安川∑Ⅴ调试整理目录一.伺服与控制器的连接 (2)二.基本参数设定 (4)三.调谐步骤说明 (5)四.Sigmawin+介绍 (7)1.自动设定转动惯量比 (7)2.有指令自动调谐 (14)3.无指令自动调谐 (17)4.追踪模式 (20)五.警报一览表 (25)六.注意事项: (27)1.第一次调试驱动器时做一次参数复位 (27)2.设定电机编码器的型号 (27)3.关于安装sigmawin+ (27)4.关于免调整模式 (28)5.关于自动调谐 (28)6.关于追踪模式 (29)一.伺服驱动-电机-控制器的连接安川 2安川5KV :此值越大伺服刚性越高,但过大会引起抖动二.基本参数设定设定值初始化必须在伺服OFF的状态下执行,在伺服ON的状态下无法执行。
(2)根据伺服电机的型号,来判定马达编码器的分辨率,SGM**-1234567,后面的7位中,第四位为编码器的分辨率1为16位绝对式2为17位绝对式,3为20为绝对式,A为13位增量式,B为16位增量式,C为17位增量式。
电子齿轮比分子Pn20E为以上的编码器分辨率,分子Pn210为螺杆节距,伺服参数Pn212设定为:螺杆节距/4,对应系统参数61-63设为:螺杆节距/4;三.调谐步骤说明调整(调谐)是优化伺服单元响应性的功能。
响应性取决于伺服单元中设定的伺服增益。
伺服增益通过多个参数(速度环增益、位置环增益、滤波器、摩擦补偿、转动惯量比等)的组合进行设定,它们之间会相互影响。
因此,伺服增益的设定必须考虑到各个参数设定值之间的平衡。
一般情况下,刚性高的机械可通过提高伺服增益来提高响应性。
但对于刚性低的机械,当提高伺服增益时,可能会产生振动,从而无法提高响应性。
此时,可以通过伺服单元的各种振动抑制功能来抑制振动。
伺服增益的出厂设定为稳定的设定。
可根据用户机械的状态,使用以下与调整相关的辅助功能调整伺服增益,以进一步提高响应性。
对于自动调谐前,需设定转动惯量比。
如何正确调整安川伺服的参数安川伺服是一种常见且广泛应用于工业自动化设备中的控制器。
它可以根据输入的信号控制电机的运动,达到精确的位置和速度控制。
然而,为了确保安川伺服的正常运行,我们需要正确地调整其参数。
本文将介绍正确调整安川伺服参数的方法。
一、了解安川伺服参数的作用在开始调整安川伺服参数之前,我们需要先了解每个参数的作用。
安川伺服的参数通常包括位置环、速度环和电流环等参数。
位置环参数用于设置伺服控制系统中的位置环,以实现精确的位置控制。
速度环参数用于设置伺服控制系统中的速度环,以实现精确的速度控制。
电流环参数用于设置伺服控制系统中的电流环,以实现精确的电流控制。
了解每个参数的作用对于正确调整安川伺服非常重要。
二、调整位置环参数位置环参数的调整对于实现准确的位置控制至关重要。
首先,我们需要调整位置环的比例增益,即P参数。
增加比例增益可以增强位置环的灵敏度,但过高的比例增益可能导致振荡和不稳定的运动。
因此,我们需要根据具体应用场景进行适当的调整。
其次,我们需要调整位置环的积分时间常数,即Ti参数。
增加积分时间常数可以减小位置环的偏差,提高控制的稳定性。
最后,我们还需要调整位置环的微分时间常数,即Td参数。
微分时间常数的调整可以消除位置环的振荡,实现更加稳定的控制。
三、调整速度环参数速度环参数的调整对于实现准确的速度控制非常重要。
首先,我们需要调整速度环的比例增益,即P参数。
与位置环类似,增加比例增益可以增强速度环的灵敏度,但过高的比例增益可能导致振荡和不稳定的运动。
其次,我们需要调整速度环的积分时间常数,即Ti参数。
增加积分时间常数可以减小速度环的偏差,提高控制的稳定性。
最后,我们还需要调整速度环的微分时间常数,即Td参数。
微分时间常数的调整可以消除速度环的振荡,实现更加稳定的控制。
四、调整电流环参数电流环参数的调整对于实现精确的电流控制非常重要。
首先,我们需要调整电流环的比例增益,即P参数。
增加比例增益可以增强电流环的灵敏度,但过高的比例增益可能导致电流过大或过小,影响伺服的运行。
1.0目的:为了方便调整伺服参数。
2.0适用范围电气工程科;3.0权责单位电气工程科;4.0名词定义:无5.0内容5.1服马达驱动器参数设置要点:第一步:设置电子齿轮比,控制方式,发脉冲方式。
第二步:调伺服刚性(在自动调谐功能有效模式下调整,调整刚性之前必须先正确的推算惯量)第三步:调整后机器在正常速度下运行2-4次,再感觉调整效果如果不行再会到第二步,如果OK退出完成。
第四步:如果进行6-8次还调不到理想效果,进入手动调整模式(自动调谐功能设置为无效模式)第五步:调整速度环和位置环参数5.2 键的名称和功能5.3 基本模式的选择与操作5.4 状态显示5.5 用户参数设定值的初始化(Fn005)在想要将用户参数恢复为出厂时的设定时使用。
5.6 电机电流检测信号偏移量的自动调整(Fn00E)本公司已在产品出厂时对电机电流检出信号的偏移量进行了自动调整,客户不必再进行调整。
仅在想要进一步降低扭矩脉动等需要更高精度的情况下使用。
仅在主电路电源处于ON 状态,伺服OFF 时才可进行自动调整。
5.7 电机电流检测信号偏移量的手动调整(Fn00F)电机电流检测信号偏移量的调整范围在-512 ~ +511 之间。
调整电机电流检测信号偏移量时,请首先进行自动调整(Fn00E)。
仅在进行自动调整但扭矩脉动仍然偏大时才进行手动调整。
5.8 用户参数设定模式下的操作可通过设定用户参数来选择或调整功能。
用户参数有“参数设定”和“功能选择”两种类型。
参数设定是将要调整的参数数据在一定范围内进行变更的功能。
功能选择是对已分配给面板操作器各位数的功能进行选择。
5.8.1 用户参数的设定(1) 参数设定(a)“参数设定”的种类(b)“参数设定”的变更步骤实例参数设定型用户参数直接用数值指定数据。
通过用户参数一览表确认可进行变更的范围。
下面所示为将用户参数Pn100( 速度环增益) 的内容由“40”变更为“100”时的操作步骤。
安川伺服调试的一点看法1、安川伺服在低刚性(1~4)负载应用时,惯量比显得非常重要,以同步带结构而论,刚性大约在1~2(甚至1以下),此时惯量比没有办法进行自动调谐,必须使伺服放大器置于不自动调谐状态;2、惯量比的范围在450~1600之间(具体视负载而定)3、此时的刚性在1~3之间,甚至可以设置到4;但是有时也有可能在1以下。
4、刚性:电机转子抵抗负载惯性的能力,也就是电机转子的自锁能力,刚性越低,电机转子越软弱无力,越容易引起低频振动,发生负载在到达制定位置后左右晃动;刚性和惯量比配合使用;如果刚性远远高于惯量比匹配的范围,那么电机将发生高频自激振荡,表现为电机发出高频刺耳的声响;这一切不良表现都是在伺服信号(SV-ON)ON并且连接负载的情况下。
5、发生定位到位后越程,而后自动退回的现象的原因:位置环增益设置的过大,主要在低刚性的负载时有此可能,。
6、低刚性负载增益的调节:A、将惯量比设置为600;B、将Pn110设置为0012;不进行自动调谐C、将Pn100和Pn102设置为最小;D、将Pn101和Pn401设置为刚性为1时的参数E、然后进行JOG运行,速度从100~500;F、进入软件的SETUP中查看实际的惯量比;G、将看到的惯量比设置到Pn103中;H、并且自动设定刚性,通常此时会被设定为1;I、然后将SV-ON至于ON,如果没有振荡的声音,此时进行JOG运行,并且观察是否电机产生振荡;如果有振荡,必须减少Pn100数值,然后重复E、F重新设定转动惯量比;重新设定刚性;注意此时刚性应该是1甚至1以下;J、在刚性设定到1时没有振荡的情况下,逐步加快JOG速度,并且适当减少Pn305、Pn306(加减速时间)的设定值;K、在多次800rpm以上的JOG运行中没有振荡情况下进入定位控制调试;L、首先将定位的速度减少至200rpm以内进行调试M、并且在调试过程中不断减少Pn101参数的设定值;N、如果调试中发生到达位置后负载出现低频振荡现象,此时适当减少Pn102参数的设定值,调整至最佳定位状态;O、再将速度以100~180rpm的速度提高,同时观察伺服电机是否有振动现象,如果发生负载低频振荡,则适当减少Pn102的设定值,如果电机发生高频振荡(声音较尖锐)此时适当减少Pn100的设定值,也可以增加Pn101的数值;P、说明:Pn100 速度环增益Pn101 速度环积分时间常数Pn102 位置环增益Pn103 旋转惯量比Pn401 转距时间常数7、再定位控制中,为了使低刚性结构的负载能够减少机械损伤,因此可以在定位控制的两头加入一定的加减速时间,尤其是加速时间;通常视最高速度的高低,可以从0.5秒设定到2.5秒(指:0到最高速的时间)。
安川伺服电机参数基本调整动态参数调整步骤:
步骤一. 设定系统刚性(Fn 001)
Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec)
Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz)
Ti : 速度回路积分增益(机床Ti 建议值10-30 ms)
范例: 以机床大小选择不同刚性(1米加工中心机建议Fn001设定5 )
步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比…,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。
(打开在线自动调谐功能) 2.手动Jog床台让床台来回往复多次运行。
3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。
4.将Fn007内容写入EEPROM。
(按Mode键至Fn000→按Up或Down键至Fn007
→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM)
5.参数Pn110设12。
(关闭在线自动调谐功能) 步骤三. 起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率)
马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 .
步骤四. 将速度回路增益参数再调高
就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量
YASKAWA伺服參數設定說明:
备注: 1、带* 为驱动器必须设定的参数,马达才能正常运转!
2、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:
伺服电机编码器类型的回授脉冲数
32768
2
比特17
中设所需精度单位)通常新代控制器所设精度单位1um/Pules (可在系统参数17
倍(可在系统参数通常新代控制器所设的倍频数是4 81~100中所设轴卡的倍频)
计算公式:
负载转一圈移动量脉÷( 4 ××M﹞﹝编码器的脉冲数电子齿轮比Pn202 / Pn203 =
N )
×冲数N是指马达和工作台传动侧的机械齿轮比M和控马达转一圈回授的脉冲数新代系统参数61~63 = Pn201 = 负载转一圈移动量脉冲数÷制器内部所设的倍频4******
****** ex:
比特采用直传连轴器C 10mm 当螺杆的节距是马达选用型17 那齿轮比计算如下:4 Pules = 负载转一圈移动量脉冲数10mm÷1um/Pules =10M / N = 1 / 1 4 8192 / 625 = ÷(10×1 ) 4Pn202 / Pn203 = (32768××1 )
4 2500 Pules 4 = Pn201 = 10 ÷
为上面公式根据实际情、Pn203Pn202、设定上表中的驱动器参数,值为后面的设定值;2 Pn201、、况计算出来的值;Pn100、Pn101Pn102先不修改数值,为出厂值;数值Fn001Z 轴的来回运动,通过增大驱动器参数值,按加1Y3、调整机台的刚性,先进行X、、ZY、增大;通常调节到机台出现震动或有声音后,降回原一级。
注意一点:调完后,需把X、设成一样大;的位置增益Pn102
注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
倍比)(位置脉冲形式为型编码器伺服马达配C(32768pulse/REV),控制精度。