定时器 计数器简单电路编程及梯形图的经验设计法
- 格式:ppt
- 大小:801.50 KB
- 文档页数:28

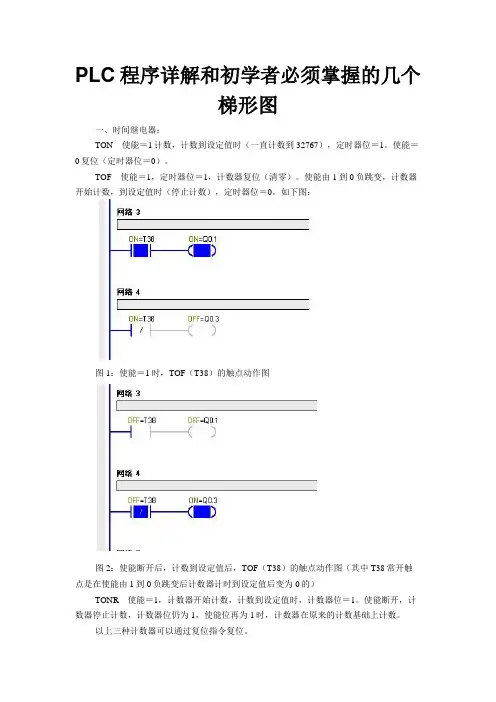
PLC程序详解和初学者必须掌握的几个梯形图一、时间继电器:TON使能=1计数,计数到设定值时(一直计数到32767),定时器位=1。
使能=0复位(定时器位=0)。
TOF使能=1,定时器位=1,计数器复位(清零)。
使能由1到0负跳变,计数器开始计数,到设定值时(停止计数),定时器位=0。
如下图:图1:使能=1时,TOF(T38)的触点动作图图2:使能断开后,计数到设定值后,TOF(T38)的触点动作图(其中T38常开触点是在使能由1到0负跳变后计数器计时到设定值后变为0的)TONR使能=1,计数器开始计数,计数到设定值时,计数器位=1。
使能断开,计数器停止计数,计数器位仍为1,使能位再为1时,计数器在原来的计数基础上计数。
以上三种计数器可以通过复位指令复位。
正交计数器A相超前B相90度,增计数B相超前A相90度,减计数当要改变计数方向时(增计数或减计数),只要A相和B相的接线交换一下就可以了。
二、译码指令和编码指令:译码指令和编码指令执行结果如图所示:DECO是将VW2000的第十位置零(为十进制的1024),ENCO输入IN最低位为1的是第3位,把3写入VB10(二进制11)。
三、填表指令(ATT)S7-200填表指令(ATT)的使能端(EN)必须使用一个上升沿或下降沿指令(即在下图的I0.1后加一个上升沿或下降沿),若单纯使用一个常开触点,就会出现以下错误:这一点在编程手册中也没有说明,需要注意。
其他的表格指令也同样。
四、数据转换指令使用数据转换指令时,一定要注意数据的范围,数据范围大的转换为数据范围小的发注意不要超过范围。
如下图所示为数据的大小及其范围。
(1)BCD码转化为整数(BCD_I)关于什么是BCD码,请参看《关于BCD码》。
BCD码转化为整数,我是这样理解的:把BCD码的数值看成为十进制数,然后把BCD到整数的转化看成是十进制数到十六进制数的转化。
如下图所示,BCD码为54,转化为整数后为36。
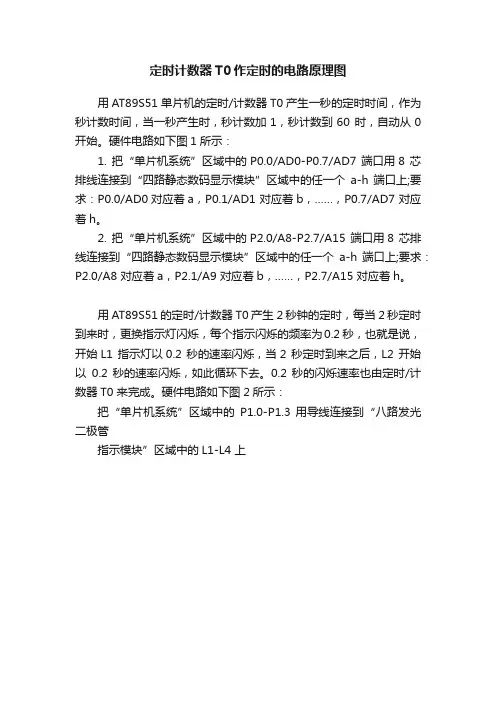
定时计数器T0作定时的电路原理图
用AT89S51 单片机的定时/计数器T0 产生一秒的定时时间,作为秒计数时间,当一秒产生时,秒计数加1,秒计数到60 时,自动从0 开始。
硬件电路如下图1所示:
1. 把“单片机系统”区域中的P0.0/AD0-P0.7/AD7 端口用8 芯排线连接到“四路静态数码显示模块”区域中的任一个a-h 端口上;要求:P0.0/AD0对应着a,P0.1/AD1 对应着b,……,P0.7/AD7 对应着h。
2. 把“单片机系统”区域中的P2.0/A8-P2.7/A15 端口用8 芯排线连接到“四路静态数码显示模块”区域中的任一个a-h 端口上;要求:P2.0/A8 对应着a,P2.1/A9 对应着b,……,P2.7/A15 对应着h。
用AT89S51 的定时/计数器T0 产生2 秒钟的定时,每当2 秒定时到来时,更换指示灯闪烁,每个指示闪烁的频率为0.2 秒,也就是说,开始L1 指示灯以0.2 秒的速率闪烁,当2 秒定时到来之后,L2 开始以0.2 秒的速率闪烁,如此循环下去。
0.2 秒的闪烁速率也由定时/计数器T0 来完成。
硬件电路如下图2所示:
把“单片机系统”区域中的P1.0-P1.3 用导线连接到“八路发光二极管
指示模块”区域中的L1-L4 上。
PLC程序中定时器和计数器的配合应用实际应用中,定时器和计数器,常常有“强强联合”形式的搭配性应用。
一、定时器1、定时器是位/字复合元件,可以有三个属性:1)有线圈/触点元件,当满足线圈的驱动(时间)条件时,触点动作;2)具有时间控制条件,当线圈被驱动时,触点并不是实时做出动作反应,而是当线圈被驱动时间达到预置时间后,触点才做出动作;3)具有数值/数据处理功能,同时又是“字元件”。
2、可以用两种方法对定时时间进行设置:1)直接用数字指定。
FX编程器用10进制数据指定,如K50,对于100ms定时器来讲,延时5秒动作。
为5秒定时器。
对LS编程器,可用10制数或16进制数设定,如50(或h32),对于100ms定时器来讲,延时5秒动作;2)以数据寄存器D设定定时时间,即定时器的动作时间为D内的寄存数值。
3、由定时器构成的时间控制程序电路:LS编程器中的定时器有多种类型,但FX编程器中的定时器只有“得电延时输出”定时器一种,可以通过编写相应程序电路来实现“另一类型”的定时功能。
图1程序电路中,利用M0和T1配合,实现了单稳态输出——断开延时定时器功能,X1接通后,Y0输出;X1断开后,Y0延时10秒才断开;T2、T3、Y2电路则构成了双延时定时器,X4接通时,Y2延时2秒输出;X4断开时,Y2延时3秒断开;Y3延时输出的定时时间,是由T4定时器决定的,T4的定时时间是同D1数据寄存器间接指定的。
当X2接通时,T4定时值被设定为10秒;当X3接通时,T4定时值则被设定为20秒。
XO提供定时值的清零/复位操作。
单个定时器的定时值由最大设定值所限定(0.1∽3276.7s),换言之,其延时动作时间不能超过1小时。
如欲延长定时时间,可以如常规继电控制线路一样,将多只定时器“级联”,总定时值系多只定时器的定时值相加,以扩展定时时间。
更好的办法,是常将定时器与计数器配合应用,其定时时间,即变为定时器的定时器与计数器的计数值相乘,更大大拓展了定时范围,甚至可以以月或年为单位进行定时控制。
定时器计数器常用编程方法定时器计数器是编程中常用的工具,它们可以用于控制程序的执行时间、测量时间间隔、产生脉冲信号等。
以下是一些常用的编程方法来使用定时器计数器:1. 硬件定时器/计数器:许多微控制器和处理器都内置了硬件定时器/计数器。
这些定时器/计数器可以用于产生精确的时间延迟或测量时间间隔。
在编程时,通常需要配置定时器/计数器的参数,如计数频率、计数值等,然后启动定时器/计数器,让它自动计数或计时。
2. 软件定时器/计数器:如果硬件没有提供定时器/计数器,或者需要更灵活的控制,可以使用软件定时器/计数器。
软件定时器/计数器是通过程序代码实现的,通常使用循环和延时函数来模拟定时或计数。
这种方法不如硬件定时器/计数器精确,但可以实现简单的定时和计数功能。
3. 操作系统提供的定时器/计数器:许多操作系统都提供了定时器和计数器的API或功能。
例如,在Windows系统中,可以使用CreateTimerQueueTimer函数创建一个定时器,用于在指定的时间间隔后触发回调函数。
在Linux系统中,可以使用alarm或setitimer函数设置定时器。
这些方法通常需要结合操作系统提供的API进行编程。
4. 第三方库或框架:许多编程语言和框架提供了对定时器和计数器的支持。
例如,Python中的time模块提供了sleep函数用于暂停程序执行一段时间,而Tkinter库提供了Timer类用于在GUI应用程序中创建定时器。
这些库或框架通常提供更高级的功能和更灵活的控制,但需要学习和使用特定的API或语法。
总之,使用定时器计数器的编程方法有很多种,具体选择哪种方法取决于应用程序的需求和使用的编程语言或框架。
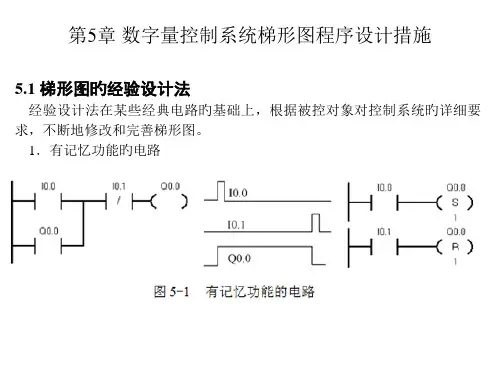
用“经验设计法”编写PLC 梯形图程序宁波技师学院电气系王柏华一、经验设计法简介梯形图程序设计是可编程控制器应用中最关键的问题,PLC 梯形图程序设计常用方法有: 经验设计法、顺序控制设计法和逻辑代数设计法等。
PLC 梯形图程序用“经验设计法”编写, 是沿用了设计继电器电路图的方法来设计梯形图, 即在某些典型电路的基础上, 根据被控对象对控制系统的具体要求, 不断地修改和完善梯形图。
有时需要多次反复地进行调试和修改梯形图, 不断地增加中间编程元件和辅助触点, 最后才能得到一个较为满意的结果。
因此, 所谓的经验设计法是指利用已经的经验( 一些典型的控制程序、控制方法等), 对其进行重新组合或改造, 再经过多次反复修改, 最终得出符合要求的控制程序。
这种设计方法没有普遍的规律可以遵循, 具有很大的试探性和随意性, 最后的结果也不是唯一的, 设计所用的时间、设计质量与设计者的经验有很大的关系, 因此有人就称这种设计方法为经验设计法, 它是其他设计方法的基础, 用于较简单的梯形图程序设计。
用经验设计法编程, 可归纳为以下四个步骤:(1) 控制模块划分( 工艺分析) 。
在准确了解控制要求后, 合理地对控制系统中的事件进行划分, 得出控制要求有几个模块组成、每个模块要实现什么功能、因果关系如何、模块与模块之间怎样联络等内容。
划分时, 一般可将一个功能作为一个模块来处理, 也就是说, 一个模块完成一个功能。
(2) 功能及端口定义。
对控制系统中的主令元件和执行元件进行功能定义、代号定义与I/O 口的定义( 分配), 画出I/O 接线图。
对于一些要用到的内部元件, 也要进行定义, 以方便后期的程序设计。
在进行定义时, 可用资源分配表的形式来进行合理安排元器件。
(3) 功能模块梯形图程序设计。
根据已划分的功能模块, 进行梯形图程序的设计, 一个模块, 对应一个程序。
这一阶段的工作关键是找到一些能实现模块功能的典型的控制程序, 对这些控制程序进行比较, 选择最佳的控制程序( 方案选优), 并进行一定的修改补充, 使其能实现所需功能。
C语言单片机定时器计数器程序1. 简介C语言是一种被广泛应用于单片机编程的高级编程语言,它可以方便地操作单片机的各种硬件模块,包括定时器和计数器。
定时器和计数器是单片机中常用的功能模块,它们可以用来实现精确的时间控制和计数功能。
本文将介绍如何使用C语言编程实现单片机的定时器计数器程序。
2. 程序原理在单片机中,定时器和计数器通常是以寄存器的形式存在的。
通过对这些寄存器的操作,可以实现定时器的启动、停止、重载以及计数器的增加、减少等功能。
在C语言中,可以通过对这些寄存器的直接操作来实现对定时器和计数器的控制。
具体而言,可以使用C语言中的位操作和移位操作来对寄存器的各个位进行设置和清零,从而实现对定时器和计数器的控制。
3. 程序设计在编写单片机定时器计数器程序时,首先需要确定定时器的工作模式,包括定时模式和计数模式。
在定时模式下,定时器可以按照设定的时间间隔生成中断,从而实现定时功能;在计数模式下,定时器可以根据外部的脉冲信号进行计数。
根据不同的应用需求,可以选择不同的工作模式,并根据具体情况进行相应的配置。
4. 程序实现在C语言中,可以通过编写相应的函数来实现对定时器和计数器的控制。
需要定义相关的寄存器位置区域和位掩码,以便于程序对这些寄存器进行操作。
编写初始化定时器的函数、启动定时器的函数、停止定时器的函数、重载定时器的函数等。
通过这些函数的调用,可以实现对定时器的各种操作,从而实现定时和计数功能。
5. 示例代码以下是一个简单的单片机定时器计数器程序的示例代码:```c#include <reg52.h>sbit LED = P1^0; // 定义LED连接的引脚void InitTimer() // 初始化定时器{TMOD = 0x01; // 设置定时器0为工作在方式1TH0 = 0x3C; // 设置初值,定时50msTL0 = 0xAF;ET0 = 1; // 允许定时器0中断EA = 1; // 打开总中断void Timer0_ISR() interrupt 1 // 定时器0中断服务函数{LED = !LED; // 翻转LED状态TH0 = 0x3C; // 重新加载初值,定时50msTL0 = 0xAF;}void m本人n(){InitTimer(); // 初始化定时器while(1){}}```以上代码实现了一个简单的定时器中断程序,当定时器计数到50ms 时,会触发定时器中断,并翻转LED的状态。
定时振荡电路的梯形图原理定时振荡电路是一种能够产生稳定周期性信号的电路。
它广泛应用于时钟、计时器、调制解调器等领域。
其中,梯形图是定时振荡电路的一种常见波形,表现为上升沿和下降沿的斜率不同,周期稳定。
梯形图原理的核心是运放作为比较器的使用。
运放是一种高增益、差分放大的集成电路元件。
在定时振荡电路中,运放扮演着比较电压输入与参考电压输出的角色。
接下来,我将详细介绍梯形图原理的实现步骤,并以运放为例来说明。
首先,梯形图原理的实现需要一个稳定的参考电压源。
典型的参考电压源有电源电压分压器、稳压管等。
这个参考电压源会被定时振荡电路的稳定电压分频网络使用。
其次,梯形图原理的实现还需要一个稳压器。
稳压器通常是一个负反馈放大电路,能够将波形信号的振幅和频率稳定在可控范围内。
稳压器通过调节电压,确保运放的输入电压保持在参考电压附近。
这样做的目的是保持运放的比较阈值稳定,从而确保梯形图的周期性。
接下来,梯形图原理需要一个运放比较器电路。
在这个电路中,参考电压和输入电压被连接到运放的正输入和负输入,使得运放可以将输入信号转换成对应的方波信号。
运放电路的性质决定了输出信号的上升沿和下降沿的斜率。
通过调整输入电压和参考电压,我们可以改变梯形图的斜率以及周期性。
最后,梯形图原理的实现需要一个反馈网络。
反馈网络的作用是将运放的输出信号接入其输入端,从而形成反馈回路。
这种反馈机制能够使得输出信号被周期性地放大和约束,从而实现定时振荡的稳定性。
反馈网络一般由电阻、电容和二极管等元件构成,它们能够有效地控制梯形图的上升沿和下降沿斜率以及周期性。
综上所述,定时振荡电路的梯形图原理主要通过运放作为比较器、参考电压源、稳压器和反馈网络等组成。
这些元件的协同作用使得电路能够产生稳定、周期性的梯形波形。
梯形图原理的实现具有很高的灵活性,我们可以通过调节电路参数来调整梯形图的形态和频率。
同时,梯形图电路还可以与其他电路组成复杂的功能模块,满足不同应用领域的需求。