零阶保持器研究
- 格式:docx
- 大小:158.43 KB
- 文档页数:9

中央民族大学信息工程学院计算机控制技术综合设计实验报告学生姓名:学号:指导教师:实验地点:实验名称:加热炉系统温度控制器设计目录一、设计题目及要求 (4)二、设计方案与结构图 (4)1、计算机控制系统结构图 (4)2、硬件结构图 (5)三、电路硬件设计 (6)1、电桥电路 (6)2、放大环节 (7)3、滤波电路 (7)4、A/D转换器 (8)5、D/A 转换电路 (9)四、参数计算及仿真 (10)1、0θ=时数字调节器D (z )的实现 (10)a 、无控制作用下系统伯德图 ....................................................................................... 10 b 、最少拍下调节器函数 ............................................................................................... 12 C 、最少拍下系统伯德图 ............................................................................................... 14 d 、单位阶跃响应下系统输出 ....................................................................................... 15 e 、施加阶跃干扰信号 ................................................................................................... 17 f 、施加随机信号影响.................................................................................................... 19 2、/20.374T θ==时数字调节器D (z )的实现 . (20)a 、无控制作用下系统伯德图 ....................................................................................... 20 b 、达林算法下调节器函数 ........................................................................................... 23 C 、达林算法下系统伯德图(未加增益) ................................................................... 25 d 、达林算法下系统伯德图(加增益) ....................................................................... 26 e 、单位阶跃响应下系统输出 ....................................................................................... 28 f 、施加阶跃干扰信号.................................................................................................... 29 g 、施加随机信号影响 (30)五、心得与体会 (32)一、设计题目及要求1、 针对一个具有纯滞后的一阶惯性环节()1sKe G s Ts τ-=+的温度控制系统和给定的系统性能指标:✧ 工程要求相角裕度为30°~60°,幅值裕度>6dB✧ 要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃2、 书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图;3、 选择一种控制算法并借助软件工程知识编写程序流程图;4、 用MATLAB 和SIMULINK 进行仿真分析和验证;对象确定:K=10*log(C*C -sqrt(C)),rand(‘state ’,C),T=rang(1), 考虑θ=0或T/2两种情况。

吉大《控制工程基础》(七)第七章 采样系统的分析零阶保持器的模型及其对控制系统的影响摘要 在计算机控制系统中,由于连续信号的离散化后,需要引入保持器对离散信号进行重构,由于零阶保持器的引入,控制系统的性能将会受到响应的影响,尤其是稳定性,本文对零阶保持器的的数学模型进行了简单的分析,它对控制系统稳定性的影响进行了数学分析和仿真说明。
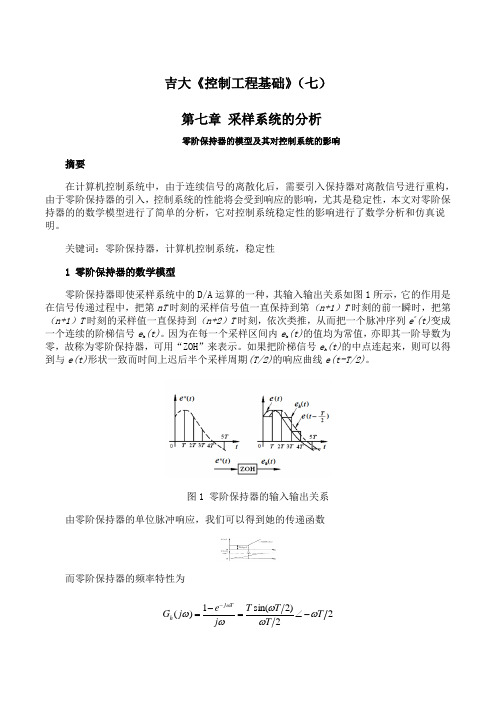
关键词:零阶保持器,计算机控制系统,稳定性1 零阶保持器的数学模型零阶保持器即使采样系统中的D/A 运算的一种,其输入输出关系如图1所示,它的作用是在信号传递过程中,把第nT 时刻的采样信号值一直保持到第(n+1)T 时刻的前一瞬时,把第(n+1)T 时刻的采样值一直保持到(n+2)T 时刻,依次类推,从而把一个脉冲序列e *(t)变成一个连续的阶梯信号e h (t)。
因为在每一个采样区间内e h (t)的值均为常值,亦即其一阶导数为零,故称为零阶保持器,可用“ZOH ”来表示。
如果把阶梯信号e h (t)的中点连起来,则可以得到与e(t)形状一致而时间上迟后半个采样周期(T/2)的响应曲线e(t-T/2)。
图1 零阶保持器的输入输出关系由零阶保持器的单位脉冲响应,我们可以得到她的传递函数而零阶保持器的频率特性为22)2sin(1)(T T T T j e j G T j h ωωωωωω-∠=-=-2 零阶保持器对系统性能的影响根据零阶保持器的频率特性可以得知,其频率幅频特性和相频特性如图2所示图2 零阶保持器的相频特性可见零阶保持器的频率特性不很理想。
信号经过零阶保持器以后,其高频分量不能完全滤掉。
此外零阶保持器具有ωT/2的相角滞后。
因此,零阶保持器的引入将会使系统的稳定性变差。
不过,这个影响与零阶保持器周期T 的选择有着很大的关系。
零阶保持器对系统稳定性的影响对于工业上很多实际的对象,可用二阶惯性加纯滞后的模型来描述其动态特性,采用这种模型来近似这些高阶对象的精度通常很高,足以满足在生产过程的要求 ,本文主要考虑零阶保持器对系统性能的影响。
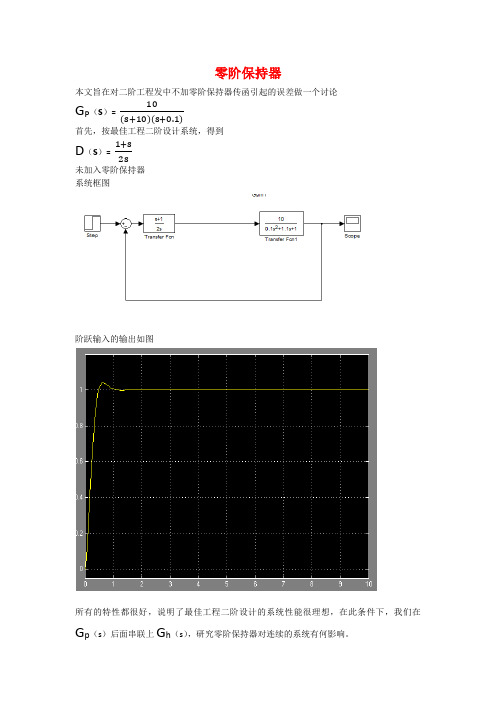
零阶保持器本文旨在对二阶工程发中不加零阶保持器传函引起的误差做一个讨论G P(s)= 10(s+10)(s+0.1)首先,按最佳工程二阶设计系统,得到D(s)= 1+s2s未加入零阶保持器系统框图阶跃输入的输出如图所有的特性都很好,说明了最佳工程二阶设计的系统性能很理想,在此条件下,我们在G p(s)后面串联上G h(s),研究零阶保持器对连续的系统有何影响。
首先,我们利用系统所给的零阶保持器,来看看系统性能有何变化系统的框图如下首先使零阶保持器的T为0.1s,阶跃输入的输出如下发现系统的超调有了增加,但稳定时间略有改进,原来的课上分析说,这是零阶保持器引入了零点的结果现在我们再将采样周期T改为0.5s,看看结果如何仿真出来的结果如下图我们可以发现,当采样周期改变后,超调变得我们无法接受了那么,将采样周期改小会如何呢?将T改为0.01s结果如下所示我们惊讶的发现,性能比最佳工程二阶更好了由于不清楚matlab中的零阶保持器具体实现过程,我自己构造了零阶保持器的环节,具体框图如下取T=0.01s,0.5s和0.1s结果如下这里的延时环节相当明显这和系统的零阶保持器做出来的结果大相径庭为了了解零阶保持器对连续系统性能实际的影响,我们对1−e −Tss进行深入分析首先,e −Ts 作泰勒级数展开,得到如下结果>>symsTs f=exp(-Ts) T= taylor(f,8) f =exp(-Ts) T =1-Ts+1/2*Ts^2-1/6*Ts^3+1/24*Ts^4-1/120*Ts^5+1/720*Ts^6-1/5040*Ts^7>> m=1-T m =Ts-1/2*Ts^2+1/6*Ts^3-1/24*Ts^4+1/120*Ts^5-1/720*Ts^6+1/5040*Ts^7可以看到,上面是一系列的零点,抱着探究性的态度,我们以二阶的近似式,也就是T – 0.5Ts +0.167Ts 2来近似,先取T=0.1s 的情况系统框图结果出现了错误,如下图,可能和MATLAB众对微分的定义有关,但是研究似乎不能进行下去了后来,在南杰胤同学的提示下,我改用pade 近似来模拟延时环节 二阶的pade 近似结果如下[a,b]=pade(0.1,2) a =1 -60 1200 b =1 60 1200即e −Ts =s 2−60s+1200s 2+60s+1200 由此得到1−e −Tss=120s s +60s +120s =120s +60+120上面的T=0.1s ,可以发现,对极点分析,结果如下>> p = [1 60 120] roots(p) p =1 60 120ans =-57.9285 -2.0715也就是说,在一定的近似情况下,零阶保持器引入了两个极点,其中的一个还是相当靠近虚轴的用此式来进行模拟,框图如下仿真结果如下超调比较大。

47、传递函数:传递函数是指在零初始条件下,系统输出量的拉式变换与系统输入量的拉式变换之比。
48、系统校正:为了使系统达到我们的要求,给系统加入特定的环节,使系统达到我们的要求,这个过程叫系统校正。
49、主导极点:如果系统闭环极点中有一个极点或者一对复数极点据虚轴最近且附近没有其他闭环零点,则它在响应中起主导作用称为主导极点。
51、状态转移矩阵:()At t e φ=,描述系统从某一初始时刻向任一时刻的转移。
52、峰值时间:系统输出超过稳态值达到第一个峰值所需的时间为峰值时间。
53、动态结构图:把系统中所有环节或者元件的传递函数填在系统原理方块图的方块中,并把相应的输入输出信号分别以拉氏变换来表示从而得到的传递函数方块图就称为动态结构图。
54、根轨迹的渐近线:当开环极点数 n 大于开环零点数 m 时,系统有n-m 条根轨迹终止于 S 平面的无穷远处,且它们交于实轴上的一点,这 n-m 条根轨迹变化趋向的直线叫做根轨迹的渐近线。
55、脉冲传递函数:零初始条件下,输出离散时间信号的z 变换()C z 与输入离散信号的变换()R z 之比,即()()()C z G z R z=。
56、Nyquist 判据(或者奈氏判据):当ω由-∞变化到+∞时, Nyquist 曲线(极坐标图)逆时针包围(-1,j0)点的圈数N ,等于系统G(s)H(s)位于s 右半平面的极点数P ,即N=P ,则闭环系统稳定;否则(N ≠P )闭环系统不稳定,且闭环系统位于s 右半平面的极点数Z 为:Z=∣P-N ∣57、程序控制系统: 输入信号是一个已知的函数,系统的控制过程按预定的程序进行,要求被控量能迅速准确地复现输入,这样的自动控制系统称为程序控制系统。
58、稳态误差:对单位负反馈系统,当时间t 趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。
实验一控制系统典型环节的模拟实验一、实验目的1.掌握控制系统中各典型环节的电路模拟及其参数的测定方法。
2.测量典型环节的阶跃响应曲线,了解参数变化对环节输出性能的影响。
二、实验内容1.对表一所示各典型环节的传递函数设计相应的模拟电路(参见表二)2.测试各典型环节在单位阶跃信号作用下的输出响应。
3.改变各典型环节的相关参数,观测对输出响应的影响。
三、实验内容及步骤1.观测比例、积分、比例积分、比例微分和惯性环节的阶跃响应曲线。
①准备:使运放处于工作状态。
将信号发生器单元U1的ST端与+5V端用“短路块”短接,使模拟电路中的场效应管(K30A)夹断,这时运放处于工作状态。
②阶跃信号的产生:电路可采用图1-1所示电路,它由“阶跃信号单元”(U3)及“给定单元”(U4)组成。
具体线路形成:在U3单元中,将H1与+5V端用1号实验导线连接,H2端用1号实验导线接至U4单元的X端;在U4单元中,将Z端和GND端用1号实验导线连接,最后由插座的Y端输出信号。
以后实验若再用阶跃信号时,方法同上,不再赘述。
实验步骤:①按表二中的各典型环节的模拟电路图将线接好(先接比例)。
(PID先不接)②将模拟电路输入端(U i)与阶跃信号的输出端Y相连接;模拟电路的输出端(Uo)接至示波器。
③按下按钮(或松开按钮)SP时,用示波器观测输出端的实际响应曲线Uo(t),且将结果记下。
改变比例参数,重新观测结果。
④同理得积分、比例积分、比例微分和惯性环节的实际响应曲线,它们的理想曲线和实际响应曲线参见表三。
2.观察PID环节的响应曲线。
实验步骤:①将U1单元的周期性方波信号(U1 单元的ST端改为与S端用短路块短接,S11波段开关置于“方波”档,“OUT”端的输出电压即为方波信号电压,信号周期由波段开关S11和电位器W11调节,信号幅值由电位器W12调节。
以信号幅值小、信号周期较长比较适宜)。
②参照表二中的PID模拟电路图,按相关参数要求将PID电路连接好。
2021年12月Chinese Journal of Intelligent Science and Technology December 2021 第3卷第4期智能科学与技术学报V ol.3No.4 基于平行控制的离散非线性系统的事件触发近似最优控制廖泽华1,2,梁子钰1,3,周天民1,卢经纬1,2,魏庆来1,2(1. 中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京 100190;2. 中国科学院大学人工智能学院,北京 100049;3. 天津大学智能电网教育部重点实验室,天津300072)摘 要:针对离散非线性系统提出了一种基于平行控制的事件触发近似最优控制方法。
首先,基于时间触发的最优值函数和最优控制律,提出了一种新型的触发条件,并基于李雅普诺夫方法证明了闭环系统的渐近稳定性。
其次,为了实施设计的触发条件,提出了一种采用神经网络和自适应动态规划技术的平行控制方法,以预测系统的下一步状态,并获得最优值函数和最优控制律。
最后,通过仿真实验验证了所提方法的有效性。
关键词:事件触发控制;非线性最优控制;平行控制;自适应动态规划中图分类号:TP273文献标识码:Adoi: 10.11959/j.issn.2096−6652.202142Parallel control-based event-driven approximate optimalcontrol of discrete-time nonlinear systemsLIAO Zehua1,2, LIANG Ziyu1,3, ZHOU Tianmin1, LU Jingwei1,2, WEI Qinglai1,21. The State Key Laboratory for Management and Control of Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing 100086, China2. School of Artificial Intelligence, University of Chinese Academy of Sciences, Beijing 100049, China3. Key Laboratory of Smart Grid of Ministry of Education, Tianjin University, Tianjin 300072, ChinaAbstract: A parallel control-based event-driven approximate optimal control method was proposed for discrete-time non-linear systems. Firstly, based on the time-triggered optimal value function and optimal control law, a novel triggering condition was developed and the asymptotic stability of the closed-loop system was proved based on the Lyapunov me-thod. Secondly, a parallel control method using neural networks and adaptive dynamic programming techniques was proposed to predict the next state of the system and to obtain the optimal value function and control law. Finally, the ef-fectiveness of the developed method was validated by numerical examples.Key words: event-driven control, nonlinear optimal control, parallel control, adaptive dynamic programming1 引言在过去的数十年中,随着计算能力的提升,智能控制方法得到了长足的进步[1-6]。
1. 已知被控对象的传递函数为Gp (s )=)15.0(10+s s ,试用模拟法设计一个数字控制器D(z ),使闭环系统满足下列性能指标: A :静态速度误差系统Kv ≥101-s B :超调量%25%≤σ C :调节时间s t s 1≤具体过程要求:1。
先用模拟法设计出D (s )2.将其转换为D (z )3.分别检验是否满足要求性能指标(其中对超调量和调节时间要有仿真研究,要有仿真曲线)4.并写出数字控制器的具体实现——差分方程 5. 如果采用数字控制器,利用位置型控制算法,试确定PID 控制器参数。
解:做原系统的BODE 图与阶跃响应曲线,检查是否满足题目要求。
得到曲线图如下:12345600.511.5Step ResponseTime (sec)A m p l i t u d e图1原系统阶跃响应曲线-60-40-200204060M a g n i t u d e (d B )10-110101102-180-135-90P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 25.2 deg (at 4.25 rad/sec)Frequency (rad/sec)图2原系统bode 图由图可知原系统的性能指标(程序见附录1):①调节时间为ts=3.79s >1s ,超调量%48%=σ>%25,不满足要求;1010)(lim 0≥==→s sGp Kv s 满足要求。
②幅值稳定裕度:Lh=20lg(Gm)=∞dB ,-π穿越频率:∞=g ωrad/s ,相位稳定裕度:=γ 18.25 ,剪切频率:=c ω 4.25rad/s 。
分析可知,需要对原系统采取如下措施:加快反应速度,降低超调量,适当增大相位稳定裕度,这样我们可以设计超前校正器D(s),再将其离散化为D(z),其过程如下所示: ⑴设计超前校正器传递函数 设超前校正器传递函数为11)(D ++=Ts Ts s α,设定校正后的相位稳定裕度为=0γ18.45则,又41.0)sin(1)sin(1=+-=m m φφα;超前校正器传递函数计算(程序见附录1)可得:11)(D ++=Ts Ts s α=105.013774.0++s s⑵校验校正后系统性能指标00255=+-=γγφmGp’(s)=D(s) Gp (s)=)15.0(10+s s *105.013774.0++s sStep ResponseTime (sec)A m p l i t u d e00.20.40.60.81 1.20.20.40.60.811.21.4图3校正后连续系统阶跃响应曲线-100-5050M a g n i t u d e (d B )10-110101102103P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 65.4 deg (at 7.28 rad/sec)Frequency (rad/sec)图4校正后连续系统bode 图由图可知原系统的性能指标(程序见附录1):①调节时间为ts=0.721s <1s ,超调量%6%=σ<%25, 1010)(lim '≥==→s sGp Kv s 满足要求。
本文旨在对二阶工程发中不加零阶保持器传函引起的误差做一个讨论G P(s)= 10
(s+10)(s+0.1)
首先,按最佳工程二阶设计系统,得到
D(s)= 1+s
2s
未加入零阶保持器
系统框图
阶跃输入的输出如图
所有的特性都很好,说明了最佳工程二阶设计的系统性能很理想,在此条件下,我们在G p(s)后面串联上G h(s),研究零阶保持器对连续的系统有何影响。
首先,我们利用系统所给的零阶保持器,来看看系统性能有何变化
系统的框图如下
首先使零阶保持器的T为0.1s,阶跃输入的输出如下
发现系统的超调有了增加,但稳定时间略有改进,原来的课上分析说,这是零阶保持器引入了零点的结果
现在我们再将采样周期T改为0.5s,看看结果如何
仿真出来的结果如下图
我们可以发现,当采样周期改变后,超调变得我们无法接受了那么,将采样周期改小会如何呢?将T改为0.01s
结果如下所示
我们惊讶的发现,性能比最佳工程二阶更好了
由于不清楚matlab中的零阶保持器具体实现过程,我自己构造了零阶保持器的环节,具体框图如下
取T=0.01s,0.5s和0.1s结果如下
这里的延时环节相当明显
这和系统的零阶保持器做出来的结果大相径庭
为了了解零阶保持器对连续系统性能实际的影响,我们对
1−e −Ts
s
进行深入分析
首先,
e −Ts 作泰勒级数展开,得到如下结果
>> syms Ts f=exp(-Ts) T= taylor(f,8) f =
exp(-Ts) T =
1-Ts+1/2*Ts^2-1/6*Ts^3+1/24*Ts^4-1/120*Ts^5+1/720*Ts^6-1/5040*Ts^7
>> m=1-T m =
Ts-1/2*Ts^2+1/6*Ts^3-1/24*Ts^4+1/120*Ts^5-1/720*Ts^6+1/5040*Ts^7
可以看到,上面是一系列的零点,抱着探究性的态度,我们以二阶的近似式,也就是
T – 0.5Ts +0.167Ts 2来近似,先取T=0.1s 的情况
系统框图
结果出现了错误,如下图,可能和MATLAB众对微分的定义有关,但是研究似乎不能进行下去了
后来,在南杰胤同学的提示下,我改用pade 近似来模拟延时环节 二阶的pade 近似结果如下
[a,b]=pade(0.1,2) a =
1 -60 1200 b =
1 60 1200
即e −Ts =s 2
−60s+1200s 2+60s+1200
由此得到
1−e −Ts
s
=120s
s +60s +120s =120
s +60+120
上面的T=0.1s ,可以发现,对极点分析,结果如下
>> p = [1 60 120] roots(p) p =
1 60 120
ans =
-57.9285 -2.0715
也就是说,在一定的近似情况下,零阶保持器引入了两个极点,其中的一个还是相当靠近虚轴的
用此式来进行模拟,框图如下
仿真结果如下
超调比较大。
由上面三种分析结果看来,三种方式模拟得到的结果各不相同,但是除了系统所给的零阶保持器外,其它的模拟传函都使系统性能得到了较大的变化。