二级剪叉式丝杠升降机构受力分析
- 格式:pdf
- 大小:294.97 KB
- 文档页数:4
剪刀叉受力计算剪刀叉是一种常见的工具,用于剪切、夹持等操作。
在使用剪刀叉时,了解其受力情况对于正确的使用和安全至关重要。
本文将介绍剪刀叉的受力计算方法与相关参考内容。
首先,我们需要了解剪刀叉的结构。
剪刀叉通常由两个叉状部分组成,每个叉状部分上有两个手柄,用于握持并施加力量。
叉状部分的尖端连接着一个铰链,使得手柄的运动变得平滑。
在剪刀叉使用过程中,主要受力部分为手柄和铰链。
为了计算剪刀叉的受力情况,我们需要考虑以下几个因素:1. 施加力的大小和方向:剪刀叉受力时,施加在手柄上的力量会转移到铰链和另一侧的手柄上。
因此,我们需要考虑施加力的大小和方向。
2. 手柄的长度和角度:手柄的长度和角度也会影响剪刀叉的受力情况。
较长的手柄会产生更大的力矩,角度的变化也会影响力的传递路径和大小。
3. 铰链的摩擦力:铰链处的摩擦力对于剪刀叉的受力情况也很重要。
摩擦力会影响力的传递和平衡,需要在计算中考虑进去。
对于剪刀叉的力量分析和受力计算,我们可以参考以下内容:1. 大学物理教材:大学物理教材通常会涵盖对于物体受力的分析和计算方法。
可以查阅有关平衡力、力矩和杠杆原理的章节,了解如何计算剪刀叉受力情况。
2. 机械工程手册:机械工程手册是一个全面的参考资料,涵盖了许多工程设计和计算方面的内容。
可以查阅其中有关机械结构和受力计算的章节,以了解剪刀叉受力的基本原理和计算方法。
3. 学术论文和研究报告:在学术领域中,有许多关于剪刀叉受力分析的研究论文和研究报告。
这些文献可以提供更加深入的理论和实验结果,对于剪刀叉受力的研究具有重要参考价值。
4. 工程实践经验:除了理论资料外,工程实践经验也是一个宝贵的参考来源。
可以咨询有相关经验的工程师或者实际应用剪刀叉的专业人士,了解他们在实际使用中的受力计算方法和注意事项。
综上所述,剪刀叉的受力计算涉及多种因素,包括施加力的大小和方向、手柄的长度和角度、铰链的摩擦力等。
可以参考大学物理教材、机械工程手册、学术论文和研究报告以及工程实践经验等资料进行学习和研究。
剪叉式升降机构稳定性分析与结构优化
剪叉式升降机构现如今被广泛应用于立体车库的设计与实现,在机动车保有量逐年增大的趋势下,市区内提供的车辆停放设施及场所也大大缩减,这使得“停车难”成为现代人出行尤为突出的弊端。
针对以上现实问题,基于剪叉式升降机构的新型立体车库应运而生,但传统的升降机构由于其较大的负载量及复杂的运动过程,导致其稳定性及安全性相对薄弱。
因此,本文通过传统力学分析方法,基于虚拟假设原理对剪叉式升降机构的稳定性进行计算,进而利用ADAMS平台的虚拟样机技术搭建三维仿真平台,最终采用有限元方法对其结构中的关键构件进行静力计算与优化设计。
首先,本文在综合分析了国内外剪叉式升降机构发展现状的基础上,分别研究了基于静力学、虚拟位移及运载机器人的剪叉式升降机构稳定性计算方法,并通过传统力学计算方法得出了在最大推力情况下,机构内各铰点的受力情况及液压缸活塞杆的稳定程度。
进而,在动力学仿真分析过程中,利用ADAMS平台的虚拟样机技术搭建剪叉式升降机构的三维模型,通过分别添加约束、载荷与驱动,实现了对剪叉式升降机构关键部件的位移、速度、加速度及作用力等信息的仿真输出,同时对升降机性能、运动范围、峰值载荷以及有限元计算的载荷输入等信息进行了合理化预估。
最终,本文采用连续体有限元的分析方法,基于ANSYS对剪叉式升降机构中的剪叉臂及活塞杆进行静力学计算,并通过模型中数据流向的优化设计,结合三维仿真分析结果,在提升整体机构稳定性的同时,实现了对活塞杆和剪叉臂的结构优化,减少材料的使用,提高经济效益。
剪叉式提升机构受力特性分析刘俊谊;杨刚;张万军;陈徐均;沈海鹏【摘要】为了对三级剪叉式提升机构的受力特性进行分析研究,首先将其简化为二级剪叉式机构,并利用虚位移原理和力学分析方法对简化后机构的轴力、弯矩和应力等进行了推导与分析,得到了机构受力与起升荷载、起升角度的关系式.然后结合对三级剪叉式机构受力特性的有限元仿真,得到了简化前后2种机构的受力特性曲线.最后对比分析发现:虽然简化后机构各点的受力特性会发生改变,但是机构中剪叉臂的轴向应力和剪切应力的最大值变化不大,剪叉臂所受的最大弯曲应力近似为简化前的2.3倍,并且这些应力的最大值均随着起升角度的增加而非线性地减小.因此,可以通过计算二级剪叉机构中的相关应力来估算三级剪叉机构中的应力.【期刊名称】《解放军理工大学学报(自然科学版)》【年(卷),期】2014(015)002【总页数】6页(P133-138)【关键词】起重机械;剪叉式机构;受力分析【作者】刘俊谊;杨刚;张万军;陈徐均;沈海鹏【作者单位】解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007;总装工程兵驻无锡地区军事代表室,江苏无锡214151;解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007【正文语种】中文【中图分类】TH211剪叉式升降机是一种结构简单、运行平稳、操作简便的高空作业设备,被广泛应用于航空航天、交通运输、冶金、汽车制造等领域[1~3]。
剪叉式提升机构是剪叉式升降机的关键组成部分,可使升降台具有较高的稳定性和承载力[4],近年来很多学者对其进行了研究。
Dong等[5]运用实验与建模的方法对剪叉机构的动力稳定性进行了研究,得到了剪叉式机构的动力稳定性随其柔度的增大而减小等结论。
郭凯等[6]基于齐次坐标变换法,提出了一种对平面变比例剪叉式机构进行建模与分析的通用性方法,该方法为机构设计优化、动力设计和驱动设计提供了依据和基础。
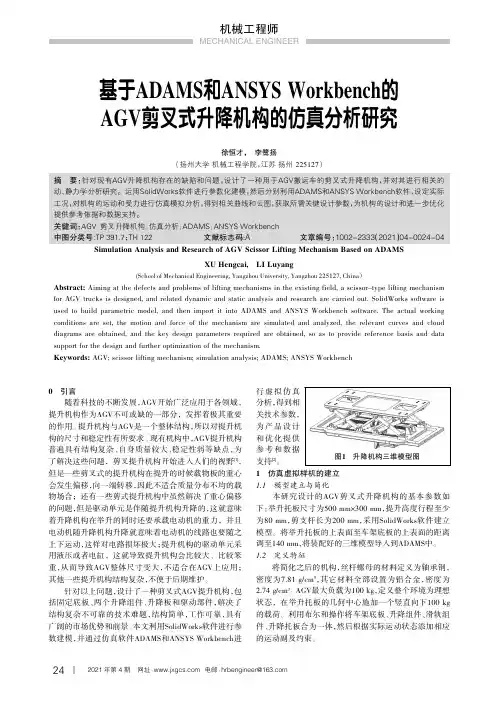
基于ADAMS和ANSYS Workbench的AGV剪叉式升降机构的仿真分析研究徐恒才,李鹭扬(扬州大学机械工程学院,江苏扬州225127)0引言随着科技的不断发展,AGV开始广泛应用于各领域,提升机构作为AGV不可或缺的一部分,发挥着极其重要的作用。
提升机构与AGV是一个整体结构,所以对提升机构的尺寸和稳定性有所要求。
现有机构中,AGV提升机构普遍具有结构复杂、自身质量较大、稳定性弱等缺点,为了解决这些问题,剪叉提升机构开始进入人们的视野[1],但是一些剪叉式的提升机构在提升的时候载物板的重心会发生偏移,向一端转移,因此不适合质量分布不均的载物场合;还有一些剪式提升机构中虽然解决了重心偏移的问题,但是驱动单元是伴随提升机构升降的,这就意味着升降机构在举升的同时还要承载电动机的重力,并且电动机随升降机构升降就意味着电动机的线路也要随之上下运动,这样对电路损坏极大;提升机构的驱动单元采用液压或者电缸,这就导致提升机构会比较大、比较笨重,从而导致AGV整体尺寸变大,不适合在AGV上应用;其他一些提升机构结构复杂,不便于后期维护。
针对以上问题,设计了一种剪叉式AGV提升机构,包括固定底板、两个升降组件、升降板和驱动部件,解决了结构复杂不可靠的技术难题,结构简单,工作可靠,具有广阔的市场优势和前景。
本文利用SolidWorks软件进行参数建模,并通过仿真软件ADAMS和ANSYS Workbench进行虚拟仿真分析,得到相为产品设计和优化提供参考和数据支持[2]。
1仿真虚拟样机的建立1.1模型建立与简化本研究设计的AGV剪叉式升降机构的基本参数如下:举升托板尺寸为500mm×300mm,提升高度行程至少为80mm,剪支杆长为200mm,采用SolidWorks软件建立模型。
将举升托板的上表面至车架底板的上表面的距离调至140mm,将装配好的三维模型导入到ADAMS中。
1.2定义特征将简化之后的机构,丝杆螺母的材料定义为轴承钢,密度为7.81g/cm3,其它材料全部设置为铝合金,密度为2.74g/cm3。
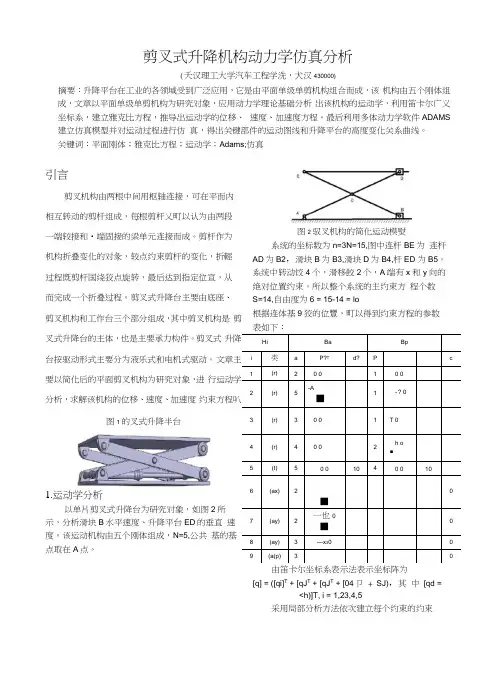
剪叉式升降机构动力学仿真分析(夭汉理工大学汽车工程学洗,犬汉430000)摘要:升降平台在工业的各领域受到广泛应用,它是由平面单级单剪机构组合而成,该机构由五个刚体组成,文章以平面单级单剪机构为研究对象,应用动力学理论基础分析出该机构的运动学,利用笛卡尔广义坐标系,建立雅克比方程,推导出运动学的位移、速度、加速度方程。
最后利用多体动力学软件ADAMS 建立仿真模型并对运动过程进行仿真,得出关键部件的运动图线和升降平台的高度变化关系曲线。
关键词:平面刚体;雅克比方程;运动学;Adams;仿真引言剪叉机构由两根中间用枢轴连接,可在平而内相互转动的剪杆组成,每根剪杆乂町以认为由两段一端较接和•端固接的梁单元连接而成。
剪杆作为机构折叠变化的对彖,较点约束剪杆的变化,折輕过程既剪杆国绕狡点旋转,最后达到指定位宣,从而完成一个折叠过程。
剪叉式升降台主要由底座、图2驭叉机构的简化运动模熨系统的坐标数为n=3N=15,图中连杆BE为连杆AD为B2,滑块B为B3,滑块D为B4,杆ED 为B5。
系统中转动饺4个,滑移餃2个,A端有x 和y向的绝对位置约束。
所以整个系统的主约束方程个数S=14,自由度为6 = 15-14 = lo剪叉机构和工作台三个部分组成,其中剪叉机构是剪叉式升降台的主体,也是主要承力构件。
剪叉式升降台按驱动形式主要分为液乐式和电机式驱动。
文章主要以简化后的平面剪叉机构为研究对象,进行运动学分析,求解该机构的位移、速度、加速度约束方程叭图1的叉式升降半台1.运动学分析以单片剪叉式升降台为研究对象,如图2所示,分析滑块B水平速度、升降平台ED的垂直速度。
该运动机构由五个刚体组成,N=5,公共基的基点取在A点。
Hi Ba Bpi 类 a P?T d? P c1 (r)2 0 0 1 0 02 (r) 5-A■ 1-?03 (r) 3 0 0 1 T 04 (r) 4 0 0 2h o■5 (t) 5 0 0 10 4 0 0 106 (ax) 2■0 7 (ay) 2一也0■08 (ay) 3 —x30 09 (a(p) 3 0 根据连体基9狡的位豐,町以得到约束方程的参数表如下:由笛卡尔坐标系表示法表示坐标阵为[q] = ([qi]T + [qJ T + [qJ T + [04卩 + SJ),其中[qd =<h)]T, i = 1,23,4,5采用局部分析方法依次建立每个约束的约束方程,对于刚体1和2之间的旋转铁有约束方程组:[0T = [r Q ]-[r 訂 + [A«][pJ]-[Aq[p p p ] = 0 (1) 即:画弋H ;:MH 沪貯;:】"对局部约束方程(1)求导得其雅克比:[0;]=([I]2 [H[A ・][P :P] -[I]2 -ffl[A p ][p p q )[0J] = O⑵其中[0』<|I]2 [l][A*][P ;p ])=[;1 匕 3何4(-uh -m[Aq(P ;p ])=[J ; g雅克比右项:[0i t ] = 0[応]JA ・][P ;P][詆卜[A 叫P ;P][4>^] = 0(3)刚体1和5之间的旋转副有:对%、q?关于t 求偏导得到雅克比矩阵:[0^3J = [J ? ol11—10 —sin <l>ih 0 -1— — cos <t>xz得到该约束的雅克比右项:[05tl = 0M] =[A 叫卅][詆卜叶][咐][矶]得到该约束的雅克比右项:[0; J = 0U 12 - h k 2<P a COS <P 5 + — <l> p COS <P 丄 乙 乙 —y (b osin<l>5 + y ^"psincbizz刚体1和3之间的旋转副有:得到该约束的雅克比右项:[Y :] “AQ P F][詆卜約[P j][词cos <t> 2 -sin” 打 sin <t> 3 cos <t> 3 ] cos <t> x-sin 4>x l sin <l>x cos 4*!] » x 3 -X x U1一 y COSy 3 -yil x ..— —sin <i> 2h2 0cos<t>5 sin <t>5—sin <t> 51 COS <l> 5 ]cosG 丄 -sin <t> X 1 [sin ♦x cos <b x J闯氓卜鼬[~2 0 _h. h .X 5— X x — yCOS <P 5 + — COS <P X13 l xy 5- Yi - jsin<b 5 + 亍sin %—y 4>iCOS <t> 1-y 4>;sin% 刚体2和4之间的旋转副有: 肉赵:田囂:将上式对于q 】、qs 求偏导得到雅克比矩阵:1 0[0;qJ =0 1[0;qJ =0 亍 sin4>I 3-1-ysin <i>一 sin <t>4lroicos <t>4 ] lol心][士—sin 4> ° cos 。

剪刀叉受力计算剪刀叉受力计算常用于机械结构设计、工程力学等领域,主要用于分析剪刀叉在不同受力情况下的力学特性。
下面将从剪刀叉的受力原理、力的平衡条件以及受力分析方法等三个方面进行相关参考内容的讨论。
1. 剪刀叉的受力原理剪刀叉的基本构造通常由两个对称的刀叉臂组成,中间通过铰链连接。
当剪刀叉使用时,刀叉臂受到外部施加的力产生弯曲变形。
根据弯曲理论和材料力学原理,根据受力的具体情况可以得到受力分布和变形情况。
2. 力的平衡条件剪刀叉在受力过程中处于力的平衡状态,即受到的外力和内力之间满足平衡条件。
力的平衡条件一般可以分为两个方面:力的合成和力的分解。
对于一个剪刀叉系统,可以通过力的合成和分解将受力分析为剪刀叉臂上的正压力和剪切力。
3. 受力分析方法(1)等效剪刀叉法:将剪刀叉的复杂结构化简为一个等效剪刀叉,通过等效剪刀叉的受力分析得到剪刀叉的力学特性。
这种方法适用于结构较为简单的剪刀叉。
(2)静力平衡方程法:根据静力学的基本原理,通过分析受力物体的受力平衡方程来计算剪刀叉的受力情况。
这种方法适用于受力复杂的剪刀叉系统,但需要结合实际情况确定受力方向和力的大小。
(3)材料力学方法:通过材料力学的理论和方法,分析剪刀叉在受力过程中的应力分布和变形情况。
这种方法适用于研究剪刀叉的强度和刚度等力学特性。
需要注意的是,在剪刀叉的受力计算中,还需要考虑材料的力学性质、几何形状等因素对受力分布和变形的影响。
此外,剪刀叉系统的自重和外界载荷等也需要考虑在内,以得到更精确的受力计算结果。
总结起来,剪刀叉受力计算需要考虑剪刀叉的受力原理、力的平衡条件和受力分析方法等方面的内容。
通过合理的受力分析和计算,可以得到剪刀叉在不同受力情况下的受力分布和变形情况,为剪刀叉的设计和应用提供理论依据。
1.前言1.1课题研究的目的和意义升降机是一种升降性能好,适用围广的货物举升机构,可用于生产流水线高度差设备之间的货物运送,物料上线,下线,共件装配时部件的举升,大型机库上料,下料,仓储装卸等场所,与叉车等车辆配套使用,以及货物的快速装卸等。
它采用全液压系统控制,采用液压系统有以下特点:(1)在同等的体积下,液压装置能比其他装置产生更多的动力,在同等的功率下,液压装置的体积小,重量轻,功率密度大,结构紧凑,液压马达的体积和重量只有同等功率电机的12%。
(2)液压装置工作比较平稳,由于重量轻,惯性小,反应快,液压装置易于实现快速启动,制动和频繁的换向。
(3)液压装置可在大围实现无级调速,(调速围可达到2000),还可以在运行的过程中实现调速。
(4)液压传动易于实现自动化,他对液体压力,流量和流动方向易于进行调解或控制。
(5)液压装置易于实现过载保护。
(6)液压元件以实现了标准化,系列化,通用化,压也系统的设计制造和使用都比较方便。
当然液压技术还存在许多缺点,例如,液压在传动过程中有较多的能量损失,液压传动易泄露,不仅污染工作场地,限制其应用围,可能引起失火事故,而且影响执行部分的运动平稳性及正确性。
对油温变化比较敏感,液压元件制造精度要求较高,造价昂贵,出现故障不易找到原因,但在实际的应用中,可以通过有效的措施来减小不利因素带来的影响。
1.2国研究状况及发展前景我国的液压技术是在新中国成立以后才发展起来的。
自从1952年试制出我国第一个液压元件——齿轮泵起,迄今大致经历了仿制外国产品,自行设计开发和引进消化提高等几个阶段。
进年来,通过技术引进和科研攻关,产品水平也得到了提高,研制和生产出了一些具先进水平的产品。
目前,我国的液压技术已经能够为冶金、工程机械、机床、化工机械、纺织机械等部门提供品种比较齐全的产品。
但是,我国的液压技术在产品品种、数量及技术水平上,与国际水品以及主机行业的要求还有不少差距,每年还需要进口大量的液压元件。
液压剪叉升降机力学计算引言液压剪叉升降机是一种常见的工业设备,用于提升和降低重物。
在设计和使用这种机器时,力学计算是必不可少的。
本文将介绍液压剪叉升降机的力学计算,包括静力学分析、动力学分析和结构强度计算等内容。
第一章静力学分析静力学分析是对液压剪叉升降机在静止状态下的受力和平衡条件进行分析和计算。
需要确定液压剪叉升降机的重力作用于支撑平台上的力,该力可以通过重力加速度与支撑平台上物体的质量之积得到。
然后,需要计算液压剪叉升降机支撑平台各部分之间的力和力矩平衡条件,以保证机器的稳定性和可靠性。
在进行静力学分析时,还需要考虑液压缸的工作原理和液压系统的工作状态,确保液压剪叉升降机可以实现平稳的升降操作。
第二章动力学分析动力学分析是对液压剪叉升降机在运动状态下的受力和运动规律进行分析和计算。
动力学分析的目的是确定液压剪叉升降机在运动过程中所受的动力和加速度。
需要确定液压系统中液压缸的工作压力和流量,以及液压缸和升降平台的质量和摩擦系数等参数。
然后,利用牛顿第二定律和安培定理等基本原理,可以计算液压剪叉升降机在不同运动状态下所受的总力和加速度。
动力学分析还可以用于优化液压系统的设计和参数选择,以提高液压剪叉升降机的运动效率和安全性。
第三章结构强度计算结构强度计算是对液压剪叉升降机的结构组件进行应力和变形分析,以保证机器在承受外部载荷时不发生破坏和变形。
在结构强度计算中,需要考虑液压剪叉升降机不同部件的材料特性、几何形状和受力方式等因素。
常用的结构强度计算方法包括有限元分析、静力强度计算和疲劳强度计算等。
这些方法可以用于预测液压剪叉升降机在不同工况下的结构受力情况,以指导优化结构设计和选择合适的材料。
第四章实例分析本章将结合一个实例对的应用进行分析。
该实例是一个用于仓库货物装卸的液压剪叉升降机,设计要求是能够承载最大5000千克的货物,并实现平稳的升降操作。
进行静力学分析,确定液压剪叉升降机的支撑平台重力和支撑部件之间的力平衡条件。
专逊撷显二级剪叉式液压升降机液压缸布置方式研究口西庆坤口杨德辉口李兴慧四川工程职业技术学院机电工程系四川德阳618000摘要:分析了二级剪叉式液压升降机的三种主要布置方式,以及液压缸倾斜布置时的三种液压缸安装位置方案。
对于其中的一种方案,应用虚位移原理计算求解液压缸推力,并以液压缸推力最小为目标建立优化设计数学模型,通过MATLAB软件得到液压缸推力最小时的液压缸安装位置。
通过研究液压缸布置方式,提高了二级剪叉式液压升降机的设计效率和传动质量。
关键词:液压升降机液压缸布置研究中图分类号:TH137;TH211文献标志码:A文章编号:1000-4998(2020)04-0015-04Abstract:The three main arangemenas of the two-stage scissor—type hy9raulic elevator were analyze9%as well as thee schemes on mounting positions foe the hydraulic cylinder when the hydraulic cylin9ers were tilted. Foe one of these schemes,the principle of virtual displacement was used to cclculate the thaist force of thehy9raultc cylinder.A mat0ematicyl model Cor optimization design was established with the objectiva of minimum thajst force of the hydraultc cylinder.The mounting position of W c hydraultc cylinder when its thrust force is minimum wil l be obtained through MATLAB soSwae.By studying the arrangement of the hydaulic cylinders,W c design diciency and transmission quality of the I wo-stage scissoLtype hydraulic elevator wea improved•Keywordt: Hydraulic Elevator Hydraulic Cylinder Arrangemenr ResearcC1研究目标剪叉式升降机具有结构简单、运行平稳、操作简便等优点,广泛应用于航空航天、交通运输等各种升降设备中〔j—近年来,很多学者对不同形式的剪叉式液压升降机进行了研究’于永江等⑶应用虚位移原理,对多级剪叉式液压升降机液压缸推力进行了求解,并对剪叉杆进行了受力分析和强度校核。
升降机受力分析问题讨论的报告,600字
升降机受力分析是一门重要的工程学科,受到许多工程研究者的重视。
升降机受力分析可以帮助设计人员预先考虑不同类型的受力因素,从而设计更安全、高效的机械系统。
本文尝试从受力分析的角度,讨论升降机的受力情况。
首先,我们需要了解升降机的结构及其工作原理。
升降机由两个滑块相互作用而成,一个滑块作为升降机的底座,另一个滑块作为驱动杆,由电机驱动。
在使用升降机的过程中,会产生各种受力,如摩擦力、弯曲力和剪切力等等。
其次,我们要分析升降机受力时,必须要明确不同类型受力的分量。
摩擦力是由升降机自身结构产生的,其大小与油膜和衬套的厚度有关;弯曲力由于零件在外部力作用下所受到的弯曲变形产生,其大小取决于升降机外部受力大小及其结构复杂
程度;剪切力是滑块静止时由外界施加的扭矩造成的。
此外,受力分析中还需要考虑一些其他的因素,如滑块上的附件物,滑动板材等。
针对这些外部物体,要确定其重量和布局,以避免受力不均匀,并考虑这些物体对受力产生的影响。
最后,升降机的受力分析一般由三个方面综合考虑,即结构性能,动力学及热力学。
在受力方面,要考虑机构的结构及各部件的位置、重量及尺寸等;在动力学方面,要考虑机械装置的运行特性及其受力情况;在热力学方面,要考虑机械装置的受热及冷却情况,以及其产生的受力情况。
综上所述,升降机受力分析是一项重要的工程研究,在研究前要明确不同类型受力的分量,除受力外,还要考虑附件物、滑动板材以及结构性能、动力学及热力学等方面的因素。
只有全面考虑,设计出的升降机才能保证安全可靠的运行。