剪叉式升降机受力分析及有限元仿真
- 格式:pdf
- 大小:199.31 KB
- 文档页数:3
剪叉式高空升降平台整机有限元分析及软件开发
高空作业车是一种工程机械中用于高空作业的一种特殊专用大型机械设备而剪叉式高空升降平台属于垂直升降式高空作业车的一种 , 其具有结构简单紧凑、承载能力强、操控性好等优点 , 被广泛应用于各种维修、安装、检测、物流等领域。
首先,本文以剪叉式高空升降平台为研究对象,基于ANSY歎件的APDL参数化建模语言建立了剪叉式高空升降平台各零部件的有限元模型 , 并按照各零部件之间的连接方式进行整机装配。
其次 , 施加额定载荷边界条件和位移边界条件 , 对剪叉式高空升降平台进行有限元静力结构分析 , 根据各零部件的受力情况判断其是否满足强度要求 , 并对不满足强度要求的零部件进行结构改进。
再次, 对升降平台从低到高的多个高度进行因偏载而引起的偏摆量分析 , 输出了偏摆量随高度变化的曲线。
综合考虑车轮行走过程和收车过程两种工况 , 对剪叉式高空升降平台进行遇障和突停抗倾翻稳定性分析。
然后 , 对剪叉式高空升降平台进行应力测试实验 ,将应力测试实验结果与有限元分析结果进行对比 ,验证了有限元结果的正确性。
最后,基于Visual Basic 6.0和ANSYST发了剪叉式高空升降平台有限元分析辅助软件 ,
软件集参数化建模、静力结构分析、偏摆量分析、稳定性分析和自动生成报告几大模块,将ANSYS^件的操作转化为可视化窗口的操作。
本文的研究为剪叉式高空升降平台的设计研发提供了可靠的计算依据 , 辅助分析软件也有效缩短了产品设计周期 ,结果已被企业采纳并使用 ,具有重要的现实意义。
设计计算DESIGN & CALCULATION剪叉式升降工作平台整机结构有限元分析和试验验证靳翠军1,霍晓春2,姜文光2,刘树林1(1. 徐工消防安全装备有限公司,江苏徐州221004;2. 燕山大学机械工程学院,河北秦皇岛066004)[摘要]利用APDL参数化设计语言,建立了某剪叉式升降工作平台的参数化有限元模型,进行静载应力试验并与模拟值进行对比,最大误差为13%,在工程应用许可范围内,验证了整机模拟的正确性。
对两种危险工况下的整机结构进行了静力强度、刚度有限元分析,得出剪叉臂体的薄弱部位,为下一步改进设计提供了依据。
[关键词]剪叉式升降工作平台;有限元分析;应力对比;变幅油缸推力分配[中图分类号]TH211 [文献标识码]B [文章编号]1001-554X(2016)06-0051-04Whole structural finite element analysis and experimental verificationof scissor lift work platformJIN Cui-jun,HUO Xiao-chun,JIANG Wen-guang,LIU Shu-lin剪叉式升降工作平台结构简单紧凑、承载能力强,通过性和操控性好,但作业范围小、作业高度低。
本文基于ANSYS提供的APDL语言,建立了剪叉式升降工作平台的参数化有限元模型并进行了整机有限元分析,对模拟结果进行了试验验证,保证了模拟计算精度。
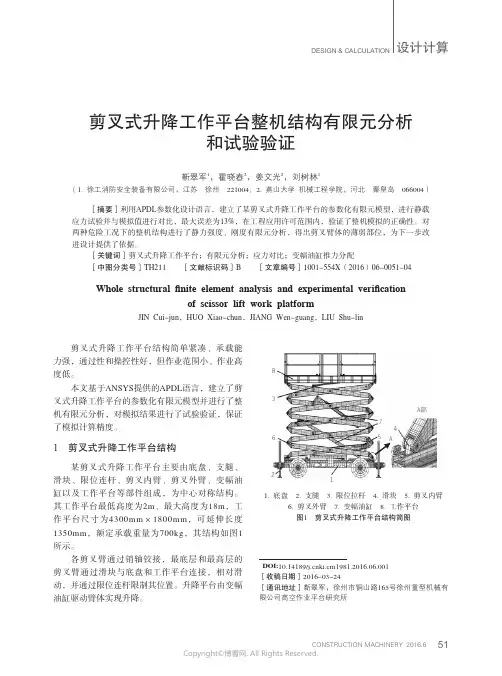
1 剪叉式升降工作平台结构某剪叉式升降工作平台主要由底盘、支腿、滑块、限位连杆、剪叉内臂、剪叉外臂、变幅油缸以及工作平台等部件组成,为中心对称结构。
其工作平台最低高度为2m、最大高度为18m,工作平台尺寸为4300mm×1800mm,可延伸长度1350mm,额定承载重量为700kg,其结构如图1 所示。
各剪叉臂通过销轴铰接,最底层和最高层的剪叉臂通过滑块与底盘和工作平台连接,相对滑动,并通过限位连杆限制其位置。
剪叉式升降机构动力学仿真分析(夭汉理工大学汽车工程学洗,犬汉430000)摘要:升降平台在工业的各领域受到广泛应用,它是由平面单级单剪机构组合而成,该机构由五个刚体组成,文章以平面单级单剪机构为研究对象,应用动力学理论基础分析出该机构的运动学,利用笛卡尔广义坐标系,建立雅克比方程,推导出运动学的位移、速度、加速度方程。
最后利用多体动力学软件ADAMS 建立仿真模型并对运动过程进行仿真,得出关键部件的运动图线和升降平台的高度变化关系曲线。
关键词:平面刚体;雅克比方程;运动学;Adams;仿真引言剪叉机构由两根中间用枢轴连接,可在平而内相互转动的剪杆组成,每根剪杆乂町以认为由两段一端较接和•端固接的梁单元连接而成。
剪杆作为机构折叠变化的对彖,较点约束剪杆的变化,折輕过程既剪杆国绕狡点旋转,最后达到指定位宣,从而完成一个折叠过程。
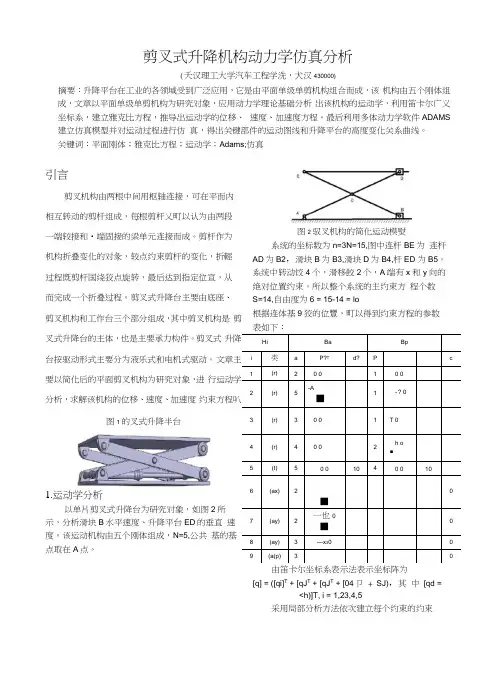
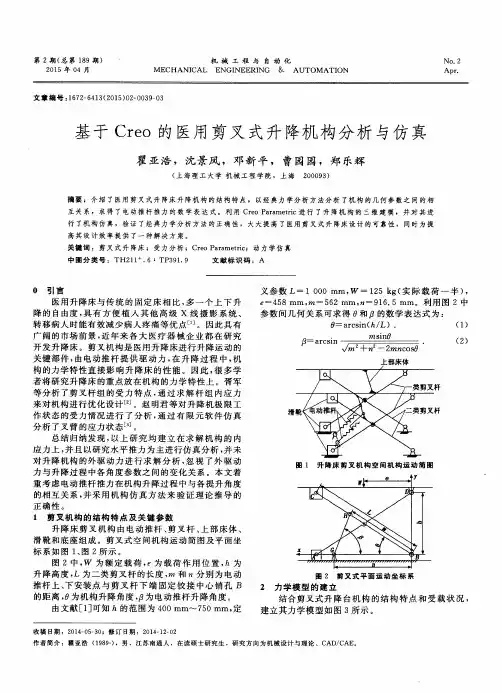
剪叉式升降台主要由底座、图2驭叉机构的简化运动模熨系统的坐标数为n=3N=15,图中连杆BE为连杆AD为B2,滑块B为B3,滑块D为B4,杆ED 为B5。
系统中转动饺4个,滑移餃2个,A端有x 和y向的绝对位置约束。
所以整个系统的主约束方程个数S=14,自由度为6 = 15-14 = lo剪叉机构和工作台三个部分组成,其中剪叉机构是剪叉式升降台的主体,也是主要承力构件。
剪叉式升降台按驱动形式主要分为液乐式和电机式驱动。
文章主要以简化后的平面剪叉机构为研究对象,进行运动学分析,求解该机构的位移、速度、加速度约束方程叭图1的叉式升降半台1.运动学分析以单片剪叉式升降台为研究对象,如图2所示,分析滑块B水平速度、升降平台ED的垂直速度。
该运动机构由五个刚体组成,N=5,公共基的基点取在A点。
Hi Ba Bpi 类 a P?T d? P c1 (r)2 0 0 1 0 02 (r) 5-A■ 1-?03 (r) 3 0 0 1 T 04 (r) 4 0 0 2h o■5 (t) 5 0 0 10 4 0 0 106 (ax) 2■0 7 (ay) 2一也0■08 (ay) 3 —x30 09 (a(p) 3 0 根据连体基9狡的位豐,町以得到约束方程的参数表如下:由笛卡尔坐标系表示法表示坐标阵为[q] = ([qi]T + [qJ T + [qJ T + [04卩 + SJ),其中[qd =<h)]T, i = 1,23,4,5采用局部分析方法依次建立每个约束的约束方程,对于刚体1和2之间的旋转铁有约束方程组:[0T = [r Q ]-[r 訂 + [A«][pJ]-[Aq[p p p ] = 0 (1) 即:画弋H ;:MH 沪貯;:】"对局部约束方程(1)求导得其雅克比:[0;]=([I]2 [H[A ・][P :P] -[I]2 -ffl[A p ][p p q )[0J] = O⑵其中[0』<|I]2 [l][A*][P ;p ])=[;1 匕 3何4(-uh -m[Aq(P ;p ])=[J ; g雅克比右项:[0i t ] = 0[応]JA ・][P ;P][詆卜[A 叫P ;P][4>^] = 0(3)刚体1和5之间的旋转副有:对%、q?关于t 求偏导得到雅克比矩阵:[0^3J = [J ? ol11—10 —sin <l>ih 0 -1— — cos <t>xz得到该约束的雅克比右项:[05tl = 0M] =[A 叫卅][詆卜叶][咐][矶]得到该约束的雅克比右项:[0; J = 0U 12 - h k 2<P a COS <P 5 + — <l> p COS <P 丄 乙 乙 —y (b osin<l>5 + y ^"psincbizz刚体1和3之间的旋转副有:得到该约束的雅克比右项:[Y :] “AQ P F][詆卜約[P j][词cos <t> 2 -sin” 打 sin <t> 3 cos <t> 3 ] cos <t> x-sin 4>x l sin <l>x cos 4*!] » x 3 -X x U1一 y COSy 3 -yil x ..— —sin <i> 2h2 0cos<t>5 sin <t>5—sin <t> 51 COS <l> 5 ]cosG 丄 -sin <t> X 1 [sin ♦x cos <b x J闯氓卜鼬[~2 0 _h. h .X 5— X x — yCOS <P 5 + — COS <P X13 l xy 5- Yi - jsin<b 5 + 亍sin %—y 4>iCOS <t> 1-y 4>;sin% 刚体2和4之间的旋转副有: 肉赵:田囂:将上式对于q 】、qs 求偏导得到雅克比矩阵:1 0[0;qJ =0 1[0;qJ =0 亍 sin4>I 3-1-ysin <i>一 sin <t>4lroicos <t>4 ] lol心][士—sin 4> ° cos 。



剪叉式液压升降台的有限元分析剪叉式液压升降台是通过液压系统来实现货物起降及搬运的专用设备,其不仅广泛用于厂房维护、工业安装、设备检修物业管理,而且适用于仓库、航空、机场、港口、车站、机械、化工、医药、电子、电力等高空设备安装和检修。
剪叉式液压升降台的结构形式多种多样,从低起升到高起升,组成剪叉臂杆的数目多,液压缸的布置形式多样,其主要由底盘、剪叉机构和工作平台三部分组成,并为中心对称结构[1]。
剪叉机构是升降平台不可或缺的部件之一,因而,剪叉机构的强度及几何尺寸必须合理才能使液压升降平台具有整体的可靠性,从现场剪叉机构的断裂位置来看,其主要损坏部位主要集中在剪叉臂中间销轴的部位[2]。
所以本文先对剪叉臂进行强度分析,然后对简化剪叉式升降台进行模态分析,分析其固有频率和振型,为剪叉式液压升降台的优化和结构设计及维护使用提供参考。
ANSYS Workbench 是ANSYS 公司开发的新一代协同仿真环境,具有协同仿真、项目管理,支持CAD-CAE 间的双向参数传输功能和自动识别复杂装配件接触关系等优点[3]。
本文将在SolidWorks 软件里建立的三维实体模型保存为Parasolid 文件,然后将Parasolid 文件导入ANSYS Workbench 软件,导入后对其进行单元属性、划分网格、施加约束、求解等,建立有限元分析模型。
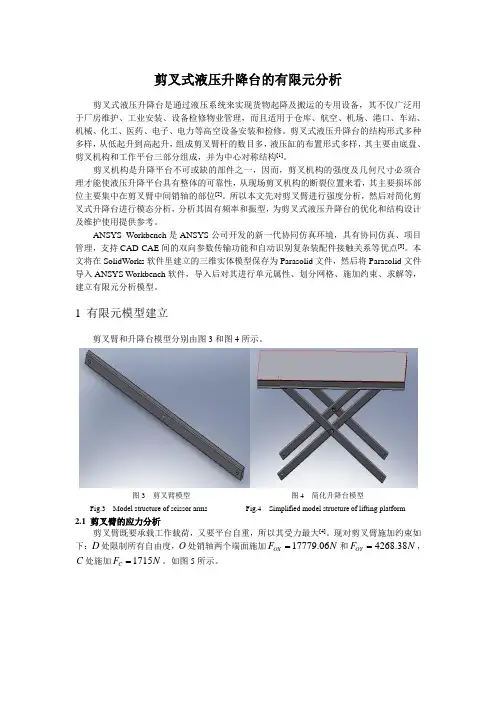
1 有限元模型建立剪叉臂和升降台模型分别由图3和图4所示。
图3 剪叉臂模型 图4 简化升降台模型Fig.3 Model structure of scissor arms Fig.4 Simplified model structure of lifting platform2.1 剪叉臂的应力分析剪叉臂既要承载工作载荷,又要平台自重,所以其受力最大[4]。
现对剪叉臂施加约束如下:D 处限制所有自由度,O 处销轴两个端面施加17779.06OX F N =和4268.38OY F N =,C 处施加1715C F N =。
剪叉式升降机受力分析及有限元仿真赵明君;刘剑雄;常安民;李军【摘要】The basic structure and working characteristic of single-layer scissor elevators with hydraulic drive were introduced in the paper. The elevator's force condition under limited working state was analyzed for getting structure parameters of elevators. In order to ensure the security of the whole working process of elevator under limited state, the force condition of fork arm belong to the hoisting mechanism was analyzed by using finite element software, and the result of simulation a-nalysis showed that the strength of material could meet the requirements.%介绍了单层液压驱动剪叉式升降机的基本结构及工作特点.为获得升降机的结构参数,对其在极限工作状态下的受力情况进行了分析.为进一步确保升降机在极限状态下能够安全的工作,通过有限元软件,对起升机构中叉臂的受力情况进行了仿真分析,结果表明叉臂的强度满足要求.【期刊名称】《新技术新工艺》【年(卷),期】2013(000)003【总页数】3页(P18-20)【关键词】剪叉式升降机;受力分析;仿真分析【作者】赵明君;刘剑雄;常安民;李军【作者单位】昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500【正文语种】中文【中图分类】TH212剪叉式升降机是一种升降性能好,适用范围广泛的起升机械,由于其结构紧凑、承载量大和操控性好的特点,在现代物流、航空装卸、大型设备的制造与维护中得到了较好的应用。
用Mathcad作剪叉升降机的受力分析一、概述(a)(b) (c)图1剪叉型升降机是常用的设备,应用广泛。
根据设计荷载和使用场合的不同有多种形式。
以下以图1(a)为例对机构作力学分析及运动分析,并探讨在工程分析中常用的数学软件MATHCAD中的实现方法。
二、参数化模型建立图2如图2所示,此系统具有一个自由度,要对机构作全过程受力分析需要对机构进行参数化建模分析,如图建立XYZ三维坐标系并对数学模型简化如图3所示:在MC中定义如下常量:(注:1. 在MC中等号有多种形式,上述使用方法代表“赋值”等号,用键盘冒号“:”作为输入方法,键盘上等号“=”在MC中计算符号或变量的值。
2. a cos-反余玄函数,MC中的内置函数)由于系统具有一个自由度,运动时必有一个独立变量,为了分析方便可设自变量为θ(AD于Y轴的夹角),则其它的变量如高度h、液压缸的长度都可以由θ确定,设自变量:(注:FRAME 是MC的内置变量,是从0开始的整数,利用此变量可作简单的图形动画。
)为了表达机构的运动规律,对关键坐标点作如下矩阵定义:参量1~4用于表达液压油缸的安装点D2、B2和D3、B3的空间位置关系。
图4只是定义了关键点的坐标,在MATHCAD中是如何绘制出形如图4的三维图形呢?可定义一个绘图路线:按照以上“绘图路径”这个1×23 阶矩阵中定义的绘图路线中的点依次连线即可绘制出出形如图4的三维图。
三、受力分析图13所示的剪叉形升降机中,动力来源是线段D2B2表示的液压油缸,设计时首先要解决的问题是:需要设计多大推力的油缸能满足升降机的全行程受力。
根据力学知识易知:在升降过程中(相同荷载条件下),油缸的受力是变化的。
设计时要求出受力的最大值作为液压油缸设计时的依据,通常解决此类问题可以对结构确定未知量,列力平衡方程来求解,但这种方法比较繁琐,对于空间结构比较复杂的机构分析和计算难度较大。
以下介绍一种通过机构运动规律计算受力的方法,这也是受力分析中常用的方法:能量法。
剪叉升降机的受力分析及在Mathcad中实现方法首先,我们需要明确剪叉升降机的工作原理。
剪叉升降机由上下叉臂组成,通过液压系统对叉臂进行升降操作。
货物放置在叉臂上,在升降过程中进行运输。
在受力分析中,我们需要考虑以下几个方面的力:1.重力:货物的重力是剪叉升降机最主要的受力之一、货物的重力作用在叉臂上,并对液压系统和升降机构产生影响。
2.惯性力:当剪叉升降机发生加速度或减速度时,货物具有惯性力。
这些力作用于叉臂和液压系统,必须考虑在内。
3.摩擦力:叉臂和液压系统之间的摩擦力会增加叉臂的阻力,对叉臂的升降速度产生影响。
4.液压力:液压系统产生的液压力是主要的推力,用于升降叉臂和货物。
接下来,我们将通过Mathcad软件来实现剪叉升降机的受力分析。
步骤1:定义参数和变量在Mathcad软件中,我们首先需要定义剪叉升降机的参数和变量。
例如,叉臂的长度、质量和位置,液压系统的工作压力和流量,货物的质量等。
这些参数和变量可以使用符号和数值进行表示。
步骤2:计算重力和惯性力的影响根据叉臂的长度和质量,可以计算叉臂所受到的重力。
根据货物的质量和运动状态,可以计算货物的惯性力。
将这些力加入叉臂的受力分析中。
步骤3:考虑摩擦力的作用摩擦力是剪叉升降机运行中常遇到的问题之一,在Mathcad中可以通过摩擦系数和叉臂的运动速度来估计和计算摩擦力的大小。
将摩擦力纳入叉臂的受力分析中。
步骤4:计算液压力步骤5:力的平衡分析根据叉臂的受力分析结果,可以进行力的平衡分析。
通过平衡叉臂所受到的各个力,可以得出剪叉升降机是否工作平衡、安全和可靠。
除了受力分析,我们还可以使用Mathcad软件进行其他方面的分析,例如运动学分析、动力学分析、承载能力分析等。
Mathcad软件提供了数学运算、绘图和数据分析等功能,可以方便地进行各种工程分析和设计。
综上所述,剪叉升降机的受力分析及在Mathcad中的实现方法可以帮助工程师和设计师更好地理解和设计剪叉升降机,确保其在运行过程中的安全和可靠性。
南京航空航天大学金城学院毕业设计(论文)剪叉式升降平台结构设计题目剪叉式升降平台结构设计系部机电工程系专业机械工程及自动化学生姓名指导教师毕设地点2016年5 月31 日摘要升降平台不论是在工业生产还是我们的日常生活中都有着重要的作用。
给我们带来的利益是非常的多。
升降平台的功能特色是非常多的,在我们生活中我们在很多的商务大厦都会用到电梯,升降平台就如电梯的性能大同小异,我们在使用升降平台的时候也可以针对自己的需求对升降平台进行设置。
根据本课题的研究是适用于高处物料升降运送。
根据实际需求拟采取如下:选择液压缸为动力,以剪叉式为传动形式,主体机构采用剪叉式结构设计。
对剪叉式升降平台关键零部件进行设计计算与校核,经过验证能实现预期的设计目标和要求。
关键词:升降平台,物料升降,剪叉式,升降平台,结构设计AbstractLifting platform in the industrial production and our daily life plays an important role. The benefit which brings to us is very much. The functional characteristics of the lifting platform is very much, in our lives we in many commercial buildings will be used in the lift, lifting platform as the elevator performance very much the same, we can also according to their own needs for lifting platform settings when using a lifting platform.According to the research on this topic is applicable to high material elevator. According to the actual demand to be taken are as follows: the selection of hydraulic cylinder as the power, the scissor transmission form, scissor structure design of the main mechanism. Design calculation and checking of scissors elevating platform of key parts and components, after the design objectives and requirements verification can achieve the desired.Key Words:Lifting platform, material lift, scissor, lifting platform, structure design目录摘要 (II)Abstract (III)目录 ...................................................................................................................................... I V 第1章绪论 . (1)1.1升降平台在生产和生活中的作用和意义 (2)1.2升降平台国内研究发展情况 (2)1.3 升降平台国外发展现状和发展趋向 (4)1.4 课题条件 (5)第2章剪叉式升降平台结构设计计算 (7)2.1 升降机构的设计 (7)2.1.1 升降机构形式的选择 (7)2.1.2 直接推动式升降机构 (7)2.1.3 连杆组合式升降机构 (7)2.2 升降平台的两种机构形式 (9)2.3 升降平台机构中三种液压缸布置方式的分析比较 (10)2.3.1问题的提出 (10)2.3.2三种方案的分析和比较 (11)2.4 剪叉式升降平台结构分析 (12)2.5 剪叉式升降平台的运动分析 (13)2.6 剪叉式升降平台的动力分析 (16)2.7 剪叉式升降平台参数的确定 (17)2.7.1基本几何尺寸的确定 (17)2.7.2 液压缸推力T及行程S的确定 (17)2.8剪叉式升降平台的校核 (18)2.8.1各铰接点的受力分析 (18)2.8.2各铰接点销的选择与校核 (20)2.8.3油缸作用处杆件尺寸的确定与校核 (21)2.9 强度校核 (22)2.9.1 剪叉臂的强度校核 (22)2.9.2 液压缸底架固定横梁的强度校核 (25)2.10 轴的强度校核 (28)2.10.1 内剪叉臂固定端销轴的强度校核 (28)2.10.2 液压缸缸体尾部销轴的强度校核 (28)2.10.3 液压缸活塞杆头部支撑轴的强度校核 (29)第3章液压传动系统的设计计算 (30)3.1明确设计要求制定基本方案 (30)3.2制定液压系统的基本方案 (30)3.2.1确定液压执行元件的形式[14] (30)3.2.2 确定液压缸的类型 (32)3.2.3 确定液压缸的安装方式 (32)3.2.4 缸盖联接的类型 (32)3.2.5拟订液压执行元件运动控制回路 (32)3.2.6液压源系统 (32)3.3确定液压系统的主要参数[15] (33)3.3.1载荷的组成与计算: (33)3.3.2初选系统压力 (35)3.3.3计算液压缸的主要结构尺寸 (35)3.3.4确定液压泵的参数[18] (37)3.3.5管道尺寸的确定 (39)3.3.6油箱容量的确定 (39)3.4液压缸主要零件结构、材料及技术要求 (39)3.4.1缸体 (39)3.4.2活塞 (40)3.4.3活塞杆 (41)3.4.4活塞杆的导向、密封和防尘 (42)3.4.5液压缸的排气装置 (42)3.4.6液压缸安装联接部分的型式及尺寸 (43)3.5 本章小结 (45)第4章剪叉式升降平台结构设计的运动学分析 (46)4.1 运动学分析的简介 (46)4.2 位移、速度及加速度分析 (47)4.2.1主运动分析 (47)4.2.2 位移曲线 (48)4.2.3 速度曲线 (49)4.2.4 加速度曲线 (49)总结 (51)参考文献 (52)致谢 (53)第1章绪论1.1升降平台在生产和生活中的作用和意义升降平台不论是在工业生产还是我们的日常生活中都有着重要的作用。
剪刀式液压升降平台的设计与仿真
第一步:需求分析
在设计与仿真之前,首先需要对液压升降平台的需求进行分析。
例如,升降高度、最大承载能力、升降速度等参数都需要明确。
第二步:选型与设计
根据需求分析结果,选择适合的液压升降平台型号。
然后基于选型结
果进行设计,包括液压系统、剪刀结构、控制系统等。
液压系统设计:根据需要确定液压缸的数量、大小和工作压力等,并
设计相应的液压系统。
液压系统通常由液压缸、液压泵、阀门等组成。
剪刀结构设计:根据最大升降高度和最大承载能力确定剪刀结构的大
小和强度。
剪刀结构通常由多个支撑杆和关节连接的组件组成。
控制系统设计:根据需求选择适合的控制方式,如手动、电动或自动
化控制。
设计控制系统包括控制按钮、传感器、电气元件等。
第三步:材料选择与制造
根据设计结果选择合适和耐用的材料进行制造。
液压升降平台通常使
用碳钢或不锈钢材料制作。
第四步:组装与调试
将制造好的各部件进行组装,并进行必要的调试。
确保液压系统能够
正常工作,剪刀结构能够平稳升降。
第五步:仿真与优化
使用仿真软件,如CAD或SolidWorks等进行液压升降平台的仿真。
通过仿真可以验证设计的有效性,并进行必要的优化。
有限元分析可以用于分析剪刀结构的强度和稳定性。
第六步:安全性评估与检测
对设计的液压升降平台进行安全性评估,并进行必要的检测。
确保平台符合相关的安全标准和规定。
最后,根据设计与仿真结果进行实际制造,并对液压升降平台进行全面的测试和验收。
研究-开发举升平台双剪刀叉结构的推力与有限元分析□周旭1□王娟21•索恩格汽车部件(中国)有限公司长沙4101292.中国电子科技集团第四十八研究所长沙410111摘要:介绍了剪刀叉举升平台的研究现状,对双剪刀叉结构的油缸推力进行了理论推导,并进行了动力学仿真验证,确认理论计算式的正确性。
与此同时,对举升平台双剪刀叉结构的强度进行了有限元分析,得到了底层剪刀叉铰点力与剪刀叉升角的关系,以及底层剪刀叉应力云图,并对结构的稳定性进行了校核,确认结构的强度和穗定性满足要求。
关键词:举升平台剪刀叉结构推力中图分类号:TH211+.6 文献标志码:B文章编号:1000 -4998(2020)07 -0032 -03Abstract:The research status of the scissor structure lifting platform was introduced.The thrust force of the cylinder in double scissor structure was theoretically derived,and the dynamic simulation and verification were carried out to confirm the correctness of the theoretical calculation formula.A t the same tim e,the finite element analysis was carried out for the strength of the double scissor structure of the lifting platform to find the relationship between the force at the linkage point of the scissor structure at bottom layer and the leading angle of the scissor structure and get the stress cloud map of the scissor structure at bottom layer.The stability of the double scissor structure was checked to confirm that the strength and stability of the structure could meet the requirem ents.Keywords:Lifting Platform Scissor Structure Thrust Force1举升平台概述剪刀叉举升平台分为固定式、拖动式、车载式三种,虽然形式各有不同,但是举升动作都是由驱动系统、电动控制系统、剪刀叉结构、工作平台四部分共同完成。