剪叉式升降台液压缸布置的运动学及动力学分析
- 格式:pptx
- 大小:78.20 KB
- 文档页数:2
剪叉式高空作业平台力学分析与油缸安装铰点位置优化剪叉式高空作业平台是用途十分普遍的高空作业设备。
它独特的剪叉机械结构,能使提供给工作人员施工作业的平台始终与地面保持水平,且承载能力强,稳定性较高。
随着剪叉式平台向着节能、提高能量利用率方面发展, 因此对降低油缸工作时的最大推力、减少剪叉机构受力的研究显得尤为关键。
本文研究在液压缸的布置不发生干涉的前提下, 对油缸的铰点安装位置进行优化并进行实物试验验证, 从而减少油缸的最大推力和提高工作平台举升时的上升平稳性。
主要研究内容及成果如下:(1) 通过对剪叉式平台进行运动学分析, 得到了工作平台上升速度的参数表达式, 在驱动液压缸速度为恒速的条件下,掌握了影响平台上升平稳性的相关参数。
对剪叉式平台的油缸进行力学分析, 得到影响油缸推力的油缸位置安装参数;对剪叉机构各铰点位置进行受力分析, 得出各组剪叉杆各铰接孔受力情况。
⑵根据剪叉机构基于AMESin软件建立其仿真模型,得到剪叉机构动态举升过程, 运行仿真后剪叉结构的性能参数以及某些参数的变化曲线, 包括平台的上升速度变化曲线、油缸举升推力曲线等。
(3) 通过理论推导与仿真分析分别在液压油缸不发生干涉的情况下, 以减少油缸最大推力为目标对油缸安装铰点位置进行优化, 得到合理的油缸安装位置参数; 通过液压测试仪测量油缸活塞在优化前后的推力变化曲线,对优化所得曲线进行验证,吻合良好,证明了优化方案的合理性。
⑷采用ANSYS Workbenc软件对优化后的改变油缸安装铰点位置的剪叉臂组进行静力学与疲劳寿命分析, 确定了结构应力集中和最大疲劳损伤的发生区域对剪叉臂的疲劳寿命进行估算, 针对于剪叉臂疲劳寿命薄弱区域进行了结构改进为剪叉臂的设计提供了参考依据以上研究成果已成功取得优化方案的预期效果, 并在实物测试试验进行验证此方案将为结构更复杂的双油缸剪叉式平台优化提供参考依据。

剪叉式升降平台工作原理剪叉式升降平台可分为:固定式,移动式,牵引式。
移动式升降平台升降动力为手动或电动,具有移动灵活、结构稳固、升降平稳、操作方便、载重量大等特点。
剪叉式升降平台主要用于物流行业、生产流水线,地下室到楼层之间的货物举升、装卸,也可用于升降舞台、升降操作台等,锡泽机电此产品具有结构稳固、故障率低、运行可靠、安全高效、维护简单方便。
固定式升降平台是一种升降稳定性好,是一款适用范围广的货物举升设备,主要用于生产流水线高度差之间货物运送;物料上线、下线、工件装配时调节工件高度,高处给料机送料,大型设备装配时部件举升,大型机床上料、下料;仓储装卸场所与叉车等搬运车辆配套进行货物快速装卸等。
移动式升降平台是用途广泛的高空作业作业专用设备。
它的剪叉机械结构,使升降台起升有较高的稳定性,宽大的作业平台和较高的承载能力,使高空作业范围更大、并适合多人同时作业。
它使高空作业效率更高,安全更保障。
主要用于车站、码头、桥梁、大厅、厂房室内外机械安装、设备维修、建筑保养。
牵引式升降平台采用外来动力做牵引,利用三相电源或柴油机做动力,移动方便快捷,适用于远距离作业,主要用于石油、电力、城建、邮电等行业野外高空作业。
此三种剪叉式升降平台工作原理为:剪叉式升降平台是靠剪刀式支承架的展开与折叠来完成货物平台的升降,其动力是通过油缸的伸缩来推动剪刀的展开与折叠,由于油缸的伸缩速度是由油泵的流量决定的,一般在设计油缸速度时速度很慢,其速度为200mm/分钟,且与油缸相连的进油管直径为Φ6mm。
油管断裂,液压油也只能从Φ6mm的进油口回油,所以下降速度也是很慢,因此不会造成破坏与损失。
具体如下:在控制系统的控制下,电动机带动液压泵的工作,液压泵将电动机转化的机械能转化为液体的压力能。
通过液体作用在液压缸上,然后由液压缸转化为机械能作用在剪叉机构上。
通过剪叉机构将机械能作用在升降平台上,最终转化为物体的势能或动能,实现将人或重物举升或下放的功能。
剪叉式液压升降台液压工作原理说到剪叉式液压升降台,可能大家脑袋里第一个浮现的画面就是那种能把东西升得老高的机器,简直像是把一个巨大的“天梯”塞进了工地或者仓库里。
你看,干活的地方就像战场,升降台就像是那种能够帮助你轻松跨越各种障碍的超级助手,绝对是“老板的得力小帮手”。
你别小看它,虽然看上去就像是一个铁皮做的“平地升高器”,可它的工作原理可是相当“高深莫测”的,今天就让我们来拆解一下,这个大家日常看到的神器究竟是怎么在背后默默使劲的。
先说说,什么叫“剪叉式”?它其实就是那种上面和下面各有两个支架,这支架就像是“剪刀”一样,一开一合,形成一种交叉的结构。
哎,你想啊,两个叉子就能支撑起整个升降台,神奇不神奇?像一个巨大的剪刀,每次升降的时候,叉子都在“啪啪啪啪”地动,帮助升降台升得又稳又高。
也就是说,液压升降台的这个“剪叉式结构”,可以帮助它在有限的空间内做出很大的动作,省空间又不占地儿,简直就是一个“空间魔术师”。
液压工作原理到底怎么运作呢?其实说白了,就是通过液压油的压力,推动升降台的上下运动。
就好比你用手推一个很重的东西,手臂使劲儿,可是液压系统就像是你手臂的“外挂”,能把那股劲儿放大,帮你轻松搬动上千斤的重物。
液压泵就像一个“水管工”,把液压油推送到液压缸里,压力一加,升降台自然就往上升。
就这么简单,升降台瞬间就能把你手里那堆重物抬得高高的,像“飞”一样。
说到这里,估计你也能感受到这“升降”背后的力量了吧,真是“无声胜有声”,不费吹灰之力。
你可能会想,这液压系统那么强大,升高后它会不会就一不小心“瘫痪”了?放心吧,剪叉式液压升降台可不是那么容易被“打倒”的。
升降台上有着非常精准的控制系统,就算液压系统再强大,控制系统也会保证升降的稳定性。
举个例子,就像你骑着自行车爬坡,脚踏在踏板上很费劲,可你会发现,骑上去之后脚踏车会有个“缓冲”,不至于让你一口气喘不上来。
这些精准的设计和配件的协调配合,才是让升降台即使在高压下依然能稳定运行的原因。
剪叉式液压升降台的有限元分析剪叉式液压升降台是通过液压系统来实现货物起降及搬运的专用设备,其不仅广泛用于厂房维护、工业安装、设备检修物业管理,而且适用于仓库、航空、机场、港口、车站、机械、化工、医药、电子、电力等高空设备安装和检修。
剪叉式液压升降台的结构形式多种多样,从低起升到高起升,组成剪叉臂杆的数目多,液压缸的布置形式多样,其主要由底盘、剪叉机构和工作平台三部分组成,并为中心对称结构[1]。
剪叉机构是升降平台不可或缺的部件之一,因而,剪叉机构的强度及几何尺寸必须合理才能使液压升降平台具有整体的可靠性,从现场剪叉机构的断裂位置来看,其主要损坏部位主要集中在剪叉臂中间销轴的部位[2]。
所以本文先对剪叉臂进行强度分析,然后对简化剪叉式升降台进行模态分析,分析其固有频率和振型,为剪叉式液压升降台的优化和结构设计及维护使用提供参考。
ANSYS Workbench 是ANSYS 公司开发的新一代协同仿真环境,具有协同仿真、项目管理,支持CAD-CAE 间的双向参数传输功能和自动识别复杂装配件接触关系等优点[3]。
本文将在SolidWorks 软件里建立的三维实体模型保存为Parasolid 文件,然后将Parasolid 文件导入ANSYS Workbench 软件,导入后对其进行单元属性、划分网格、施加约束、求解等,建立有限元分析模型。
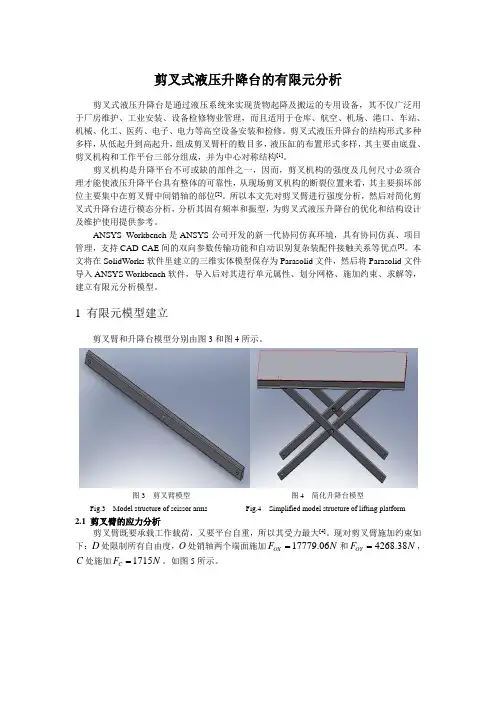
1 有限元模型建立剪叉臂和升降台模型分别由图3和图4所示。
图3 剪叉臂模型 图4 简化升降台模型Fig.3 Model structure of scissor arms Fig.4 Simplified model structure of lifting platform2.1 剪叉臂的应力分析剪叉臂既要承载工作载荷,又要平台自重,所以其受力最大[4]。
现对剪叉臂施加约束如下:D 处限制所有自由度,O 处销轴两个端面施加17779.06OX F N =和4268.38OY F N =,C 处施加1715C F N =。
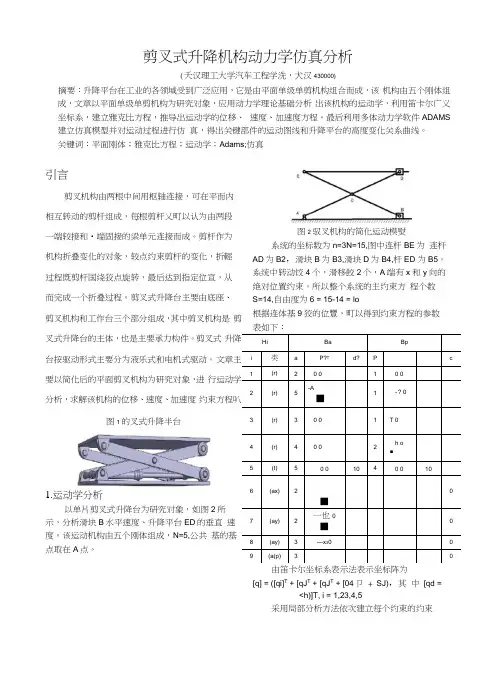
剪叉式升降机构动力学仿真分析(夭汉理工大学汽车工程学洗,犬汉430000)摘要:升降平台在工业的各领域受到广泛应用,它是由平面单级单剪机构组合而成,该机构由五个刚体组成,文章以平面单级单剪机构为研究对象,应用动力学理论基础分析出该机构的运动学,利用笛卡尔广义坐标系,建立雅克比方程,推导出运动学的位移、速度、加速度方程。
最后利用多体动力学软件ADAMS 建立仿真模型并对运动过程进行仿真,得出关键部件的运动图线和升降平台的高度变化关系曲线。
关键词:平面刚体;雅克比方程;运动学;Adams;仿真引言剪叉机构由两根中间用枢轴连接,可在平而内相互转动的剪杆组成,每根剪杆乂町以认为由两段一端较接和•端固接的梁单元连接而成。
剪杆作为机构折叠变化的对彖,较点约束剪杆的变化,折輕过程既剪杆国绕狡点旋转,最后达到指定位宣,从而完成一个折叠过程。
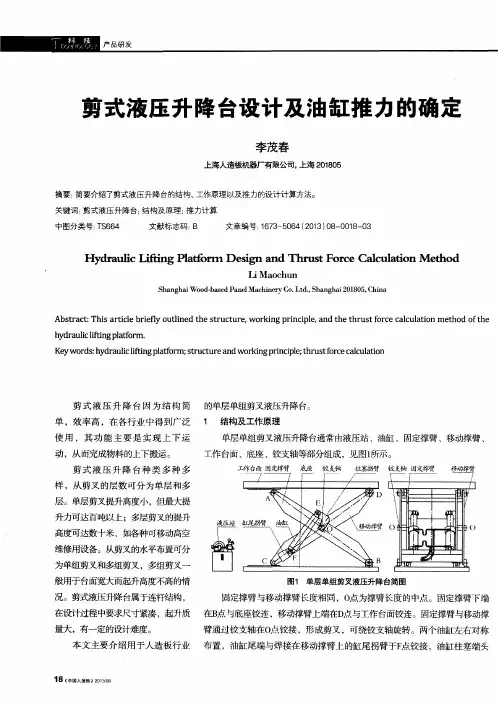
剪叉式升降台主要由底座、图2驭叉机构的简化运动模熨系统的坐标数为n=3N=15,图中连杆BE为连杆AD为B2,滑块B为B3,滑块D为B4,杆ED 为B5。
系统中转动饺4个,滑移餃2个,A端有x 和y向的绝对位置约束。
所以整个系统的主约束方程个数S=14,自由度为6 = 15-14 = lo剪叉机构和工作台三个部分组成,其中剪叉机构是剪叉式升降台的主体,也是主要承力构件。
剪叉式升降台按驱动形式主要分为液乐式和电机式驱动。
文章主要以简化后的平面剪叉机构为研究对象,进行运动学分析,求解该机构的位移、速度、加速度约束方程叭图1的叉式升降半台1.运动学分析以单片剪叉式升降台为研究对象,如图2所示,分析滑块B水平速度、升降平台ED的垂直速度。
该运动机构由五个刚体组成,N=5,公共基的基点取在A点。
Hi Ba Bpi 类 a P?T d? P c1 (r)2 0 0 1 0 02 (r) 5-A■ 1-?03 (r) 3 0 0 1 T 04 (r) 4 0 0 2h o■5 (t) 5 0 0 10 4 0 0 106 (ax) 2■0 7 (ay) 2一也0■08 (ay) 3 —x30 09 (a(p) 3 0 根据连体基9狡的位豐,町以得到约束方程的参数表如下:由笛卡尔坐标系表示法表示坐标阵为[q] = ([qi]T + [qJ T + [qJ T + [04卩 + SJ),其中[qd =<h)]T, i = 1,23,4,5采用局部分析方法依次建立每个约束的约束方程,对于刚体1和2之间的旋转铁有约束方程组:[0T = [r Q ]-[r 訂 + [A«][pJ]-[Aq[p p p ] = 0 (1) 即:画弋H ;:MH 沪貯;:】"对局部约束方程(1)求导得其雅克比:[0;]=([I]2 [H[A ・][P :P] -[I]2 -ffl[A p ][p p q )[0J] = O⑵其中[0』<|I]2 [l][A*][P ;p ])=[;1 匕 3何4(-uh -m[Aq(P ;p ])=[J ; g雅克比右项:[0i t ] = 0[応]JA ・][P ;P][詆卜[A 叫P ;P][4>^] = 0(3)刚体1和5之间的旋转副有:对%、q?关于t 求偏导得到雅克比矩阵:[0^3J = [J ? ol11—10 —sin <l>ih 0 -1— — cos <t>xz得到该约束的雅克比右项:[05tl = 0M] =[A 叫卅][詆卜叶][咐][矶]得到该约束的雅克比右项:[0; J = 0U 12 - h k 2<P a COS <P 5 + — <l> p COS <P 丄 乙 乙 —y (b osin<l>5 + y ^"psincbizz刚体1和3之间的旋转副有:得到该约束的雅克比右项:[Y :] “AQ P F][詆卜約[P j][词cos <t> 2 -sin” 打 sin <t> 3 cos <t> 3 ] cos <t> x-sin 4>x l sin <l>x cos 4*!] » x 3 -X x U1一 y COSy 3 -yil x ..— —sin <i> 2h2 0cos<t>5 sin <t>5—sin <t> 51 COS <l> 5 ]cosG 丄 -sin <t> X 1 [sin ♦x cos <b x J闯氓卜鼬[~2 0 _h. h .X 5— X x — yCOS <P 5 + — COS <P X13 l xy 5- Yi - jsin<b 5 + 亍sin %—y 4>iCOS <t> 1-y 4>;sin% 刚体2和4之间的旋转副有: 肉赵:田囂:将上式对于q 】、qs 求偏导得到雅克比矩阵:1 0[0;qJ =0 1[0;qJ =0 亍 sin4>I 3-1-ysin <i>一 sin <t>4lroicos <t>4 ] lol心][士—sin 4> ° cos 。

剪叉式液压升降机设计解读1.前⾔1.1课题研究的⽬的和意义升降机是⼀种升降性能好,适⽤范围⼴的货物举升机构,可⽤于⽣产流⽔线⾼度差设备之间的货物运送,物料上线,下线,共件装配时部件的举升,⼤型机库上料,下料,仓储装卸等场所,与叉车等车辆配套使⽤,以及货物的快速装卸等。
它采⽤全液压系统控制,采⽤液压系统有以下特点:(1)在同等的体积下,液压装置能⽐其他装置产⽣更多的动⼒,在同等的功率下,液压装置的体积⼩,重量轻,功率密度⼤,结构紧凑,液压马达的体积和重量只有同等功率电机的12%。
(2)液压装置⼯作⽐较平稳,由于重量轻,惯性⼩,反应快,液压装置易于实现快速启动,制动和频繁的换向。
(3)液压装置可在⼤范围内实现⽆级调速,(调速范围可达到2000),还可以在运⾏的过程中实现调速。
(4)液压传动易于实现⾃动化,他对液体压⼒,流量和流动⽅向易于进⾏调解或控制。
(5)液压装置易于实现过载保护。
(6)液压元件以实现了标准化,系列化,通⽤化,压也系统的设计制造和使⽤都⽐较⽅便。
当然液压技术还存在许多缺点,例如,液压在传动过程中有较多的能量损失,液压传动易泄露,不仅污染⼯作场地,限制其应⽤范围,可能引起失⽕事故,⽽且影响执⾏部分的运动平稳性及正确性。
对油温变化⽐较敏感,液压元件制造精度要求较⾼,造价昂贵,出现故障不易找到原因,但在实际的应⽤中,可以通过有效的措施来减⼩不利因素带来的影响。
1.2国内研究状况及发展前景我国的液压技术是在新中国成⽴以后才发展起来的。
⾃从1952年试制出我国第⼀个液压元件——齿轮泵起,迄今⼤致经历了仿制外国产品,⾃⾏设计开发和引进消化提⾼等⼏个阶段。
进年来,通过技术引进和科研攻关,产品⽔平也得到了提⾼,研制和⽣产出了⼀些- 1 -具先进⽔平的产品。
⽬前,我国的液压技术已经能够为冶⾦、⼯程机械、机床、化⼯机械、纺织机械等部门提供品种⽐较齐全的产品。
但是,我国的液压技术在产品品种、数量及技术⽔平上,与国际⽔品以及主机⾏业的要求还有不少差距,每年还需要进⼝⼤量的液压元件。
双铰接剪叉式液压升降台的设计-正⽂资料第⼀章绪论汽车举升机是现代汽车维修作业中必不可少的设备,它的主要作⽤就是为发动机、底盘、变速器等养护和维修提供⽅便。
举升机的从上世纪20年代开始使⽤,发展⾄今经历了许多的变化改进,种类也⽐较多,⼀般有柱式、剪式,其驱动⽅式有链条传动,液压传动,⽓压传动等。
本章就从举升机的产⽣、发展以及制造⼯艺等⽅⾯进⾏简单的介绍。
1.1 举升机的发展简史汽车举升机在世界上已经有了70年历史。
1925年在美国⽣产的第⼀台汽车举升机,它是⼀种由⽓动控制的单柱举升机,由于当时采⽤的⽓压较低,因⽽缸体较⼤;同时采⽤⽪⾰进⾏密封,因⽽压缩空⽓驱动时的弹跳严重且⼜不稳定。
直到10年以后,即1935年这种单柱举升机才在美国以外的其它地⽅开始采⽤。
1966年,⼀家德国公司⽣产出第⼀台双柱举升机,这是举升机设计上的⼜⼀突破性进展,但是直到1977这种举升机才在德国以外的其它国家出现。
现在双柱举升机在市场上以占据牢固的地位,其销量还在持续增长。
它和四柱举升机相⽐,既有优点,也有缺点,以下将作⼀简要说明。
我们所见到的绝⼤多数举升机均采⽤固定安装⽅式。
在举升前汽车必须驶上举升机。
在移动式举升机⽅⾯也有⼏项成功设计,如剪式举升机、菱架式举升机等。
但这类举升机仍存在两个主要问题,接近汽车下部较难;在车间移动举升机时难逾越地⾯上的障碍物。
当然,可移动性是这类举升机的突出优点。
现在固定安装的单柱、双柱、四柱举升机已在维修现场⼴泛采⽤,⽽移动式举升机却相对要少得多。
最初设计单柱举升机外,车辆较⼤,其底盘也能明显辨认,因⽽汽车检修区远远⼤于举升器件。
⽽今绝⼤多数汽车均为“紧凑型”或“半紧凑型”,导致汽车检修区域接近主要举升机器件⽽不便操作。
但在南美洲却属例外,那⾥仍然采⽤较⼤的车辆,这可能是单柱举升机在该地区的市场上仍然受到欢迎的重要原因。
单柱举升机有两⼤优点:当其下降后,不致成维修车间的障碍物;汽车可在举升机上转动。
剪叉式液压升降台的有限元分析剪叉式液压升降台是通过液压系统来实现货物起降及搬运的专用设备,其不仅广泛用于厂房维护、工业安装、设备检修物业管理,而且适用于仓库、航空、机场、港口、车站、机械、化工、医药、电子、电力等高空设备安装和检修。
剪叉式液压升降台的结构形式多种多样,从低起升到高起升,组成剪叉臂杆的数目多,液压缸的布置形式多样,其主要由底盘、剪叉机构和工作平台三部分组成,并为中心对称结构[1]。
剪叉机构是升降平台不可或缺的部件之一,因而,剪叉机构的强度及几何尺寸必须合理才能使液压升降平台具有整体的可靠性,从现场剪叉机构的断裂位置来看,其主要损坏部位主要集中在剪叉臂中间销轴的部位[2]。
所以本文先对剪叉臂进行强度分析,然后对简化剪叉式升降台进行模态分析,分析其固有频率和振型,为剪叉式液压升降台的优化和结构设计及维护使用提供参考。
ANSYS Workbench 是ANSYS 公司开发的新一代协同仿真环境,具有协同仿真、项目管理,支持CAD-CAE 间的双向参数传输功能和自动识别复杂装配件接触关系等优点[3]。
本文将在SolidWorks 软件里建立的三维实体模型保存为Parasolid 文件,然后将Parasolid 文件导入ANSYS Workbench 软件,导入后对其进行单元属性、划分网格、施加约束、求解等,建立有限元分析模型。
1 有限元模型建立剪叉臂和升降台模型分别由图3和图4所示。
图3 剪叉臂模型 图4 简化升降台模型Fig.3 Model structure of scissor arms Fig.4 Simplified model structure of lifting platform2.1 剪叉臂的应力分析剪叉臂既要承载工作载荷,又要平台自重,所以其受力最大[4]。
现对剪叉臂施加约束如下:D 处限制所有自由度,O 处销轴两个端面施加17779.06OX F N =和4268.38OY F N =,C 处施加1715C F N =。
剪叉式升降工作平台液压缸轴力分析与优化
剪叉式升降工作平台液压缸轴力分析与优化
作者:程婷;靳翠军;刘伟;姜文光;刘树林
作者机构:徐工消防安全装备有限公司江苏徐州221004;徐工消防安全装备有限公司江苏徐州221004;燕山大学机械工程学院河北秦皇岛066004;燕山大学机械工程学院河北秦皇岛066004;徐工消防安全装备有限公司江苏徐州221004
来源:建筑工程技术与设计
年:2017
卷:000
期:019
页码:4416-4416,4411
页数:2
正文语种:chi
关键词:液压缸;轴力;虛功原理;遗传算法
摘要:本文运用虚功原理建立数学模型来求解剪叉式升降工作平台液压缸轴力,并通过ANSYS软件建立升降工作平台有限元模型,提取液压缸轴力,以及对升降工作平台液压缸轴力进行实际测量以验证数学模型的正确性。
在此基础上,采用遗传算法利用数学模型对液压缸轴力进行优化,为剪叉式升降工作平台液压缸铰点位置设计提供了理论依据。
剪叉式高空作业平台双液压缸驱动动力学分析剪叉式高空作业平台作为一种典型的高空作业设备,具有结构紧凑、机动灵活、操作方便、价格低廉等优势,因此普遍应用于机场码头、建筑维修、电气安装、广告装潢等场合。
目前,国内生产企业的产品大都采用单液压缸驱动的方案,但随着工作高度和承受载荷的增加,一些企业开始采用上下平行配置的双液压缸同步驱动的方案。
两根液压缸的引入使剪叉式高空作业平台的动态特性变得更加复杂,而国内对这方面的研究还停留在探索阶段。
本文以双液压缸驱动的剪叉式高空作业平台为研究对象,对其进行动力学分析。
主要工作内容如下:(1)基于虚位移原理建立了双液压缸驱动的剪叉式高空作业平台的数学模型,研究了液压缸推力以及各铰点受力的计算方法。
(2)基于ADAMS软件建立了剪叉式高空作业平台的多刚体模型,利用ADAMS软件的设计评估功能对液压缸推力的影响参数进行了分析和优化。
(3)基于ANSYS和ADAMS软件建立了剪叉式高空作业平台的刚柔耦合模型,分别对两根液压缸完全同步、液压缸不同步两种情况进行仿真分析,采用逆向动力学并结合控制调节的方法对机械连接同步这一特殊情况进行仿真分析,为液压系统建模仿真提供数据基础和依据。
(4)基于AMESim和ADAMS软件建立了剪叉式高空作业平台的机液联合仿真模型,分别对液压缸缸径相同、液压缸内部泄漏和液压缸缸径不同三种情况进行仿真分析,比较液压缸推力、速度和流量的变化情况,为液压缸选型及剪叉式高空作业平台的结构改进提供参考和依据。
液压剪叉升降机力学计算引言液压剪叉升降机是一种常见的工业设备,用于提升和降低重物。
在设计和使用这种机器时,力学计算是必不可少的。
本文将介绍液压剪叉升降机的力学计算,包括静力学分析、动力学分析和结构强度计算等内容。
第一章静力学分析静力学分析是对液压剪叉升降机在静止状态下的受力和平衡条件进行分析和计算。
需要确定液压剪叉升降机的重力作用于支撑平台上的力,该力可以通过重力加速度与支撑平台上物体的质量之积得到。
然后,需要计算液压剪叉升降机支撑平台各部分之间的力和力矩平衡条件,以保证机器的稳定性和可靠性。
在进行静力学分析时,还需要考虑液压缸的工作原理和液压系统的工作状态,确保液压剪叉升降机可以实现平稳的升降操作。
第二章动力学分析动力学分析是对液压剪叉升降机在运动状态下的受力和运动规律进行分析和计算。
动力学分析的目的是确定液压剪叉升降机在运动过程中所受的动力和加速度。
需要确定液压系统中液压缸的工作压力和流量,以及液压缸和升降平台的质量和摩擦系数等参数。
然后,利用牛顿第二定律和安培定理等基本原理,可以计算液压剪叉升降机在不同运动状态下所受的总力和加速度。
动力学分析还可以用于优化液压系统的设计和参数选择,以提高液压剪叉升降机的运动效率和安全性。
第三章结构强度计算结构强度计算是对液压剪叉升降机的结构组件进行应力和变形分析,以保证机器在承受外部载荷时不发生破坏和变形。
在结构强度计算中,需要考虑液压剪叉升降机不同部件的材料特性、几何形状和受力方式等因素。
常用的结构强度计算方法包括有限元分析、静力强度计算和疲劳强度计算等。
这些方法可以用于预测液压剪叉升降机在不同工况下的结构受力情况,以指导优化结构设计和选择合适的材料。
第四章实例分析本章将结合一个实例对的应用进行分析。
该实例是一个用于仓库货物装卸的液压剪叉升降机,设计要求是能够承载最大5000千克的货物,并实现平稳的升降操作。
进行静力学分析,确定液压剪叉升降机的支撑平台重力和支撑部件之间的力平衡条件。
1文献综述进入21 世纪以后, 随着经济的发展和需求的提高, 对物流行业提出越来越高的要求。
剪叉式举升机构具有结构紧凑、承载量大、通过性强和操控性好的特点,因此在现代物流、航空装卸、大型设备的制造与维护中得到广泛应用[1]。
升降机通常采用液压驱动,所以又叫液压升降机,整机由主机、液压系统、电气系统组成。
液压升降机是一种相对简单,且适应能力很强的起重机械。
与其他起升设备相比,它速度低,能精确定位在各种高度,适合于不需要经常性提升货物的场所。
按功能来分,液压升降平台可分为起重平台及维修安装平台。
最新的液压升降平台还装备了行走机构,可在轨道上行驶,在仓库中被广泛用作拣货设备。
升降机种类丰富,类型繁多,总的来讲,按照升降结构的不同,可分为剪叉式升降机、升缩式升降机、套筒式升降机、升缩臂式升降机及折臂式升降机等。
其中剪式又分为单剪支臂液压机和双剪支臂液压机两种型式。
单剪支臂液压机的起重能力为500—10000kg;双剪支臂液压机有两种,一种是两个剪式支臂平行布置,另一种是两个剪式支臂垂直串联。
平行布置的剪式支臂液压机用来提升车辆或长大件货物,垂直布置支臂的液压机用在提升高度较大的场合[2]。
本次根据任务内容,着重介绍剪叉式液压升降机。
1.1世界升降机发展现状和升降机发展趋向近20年世界工程升降机行业发生了很大变化。
RT(越野轮胎升降机)和AT(全地面升降机)产品的迅速发展,打破了原有产品与市场格局,在经济发展及市场激烈竞争冲击下,导致世界工程升降机市场进一步趋向一体化。
目前世界工程升降机年销售额已达75亿美元左右。
主要生产国为美国、日本、德国、法国、意大利等,世界顶级公司有10多家,主要集中在北美、日本(亚洲)和欧洲。
美国既是工程升降机的主要生产国,又是最大的世界市场之一。
但由于日本、德国升降机工业的迅速发展及RT和AT产品的兴起,美国厂商在20世纪60~70年代世界市场中占有的主导地位正逐步受到削弱,从而形成美国、日本和德国三足鼎立之势。
专逊撷显二级剪叉式液压升降机液压缸布置方式研究口西庆坤口杨德辉口李兴慧四川工程职业技术学院机电工程系四川德阳618000摘要:分析了二级剪叉式液压升降机的三种主要布置方式,以及液压缸倾斜布置时的三种液压缸安装位置方案。
对于其中的一种方案,应用虚位移原理计算求解液压缸推力,并以液压缸推力最小为目标建立优化设计数学模型,通过MATLAB软件得到液压缸推力最小时的液压缸安装位置。
通过研究液压缸布置方式,提高了二级剪叉式液压升降机的设计效率和传动质量。
关键词:液压升降机液压缸布置研究中图分类号:TH137;TH211文献标志码:A文章编号:1000-4998(2020)04-0015-04Abstract:The three main arangemenas of the two-stage scissor—type hy9raulic elevator were analyze9%as well as thee schemes on mounting positions foe the hydraulic cylinder when the hydraulic cylin9ers were tilted. Foe one of these schemes,the principle of virtual displacement was used to cclculate the thaist force of thehy9raultc cylinder.A mat0ematicyl model Cor optimization design was established with the objectiva of minimum thajst force of the hydraultc cylinder.The mounting position of W c hydraultc cylinder when its thrust force is minimum wil l be obtained through MATLAB soSwae.By studying the arrangement of the hydaulic cylinders,W c design diciency and transmission quality of the I wo-stage scissoLtype hydraulic elevator wea improved•Keywordt: Hydraulic Elevator Hydraulic Cylinder Arrangemenr ResearcC1研究目标剪叉式升降机具有结构简单、运行平稳、操作简便等优点,广泛应用于航空航天、交通运输等各种升降设备中〔j—近年来,很多学者对不同形式的剪叉式液压升降机进行了研究’于永江等⑶应用虚位移原理,对多级剪叉式液压升降机液压缸推力进行了求解,并对剪叉杆进行了受力分析和强度校核。