剪叉式提升机构受力特性分析
- 格式:docx
- 大小:42.06 KB
- 文档页数:10
剪叉式升降机受力分析及有限元仿真
赵明君;刘剑雄;常安民;李军
【期刊名称】《新技术新工艺》
【年(卷),期】2013(000)003
【摘要】介绍了单层液压驱动剪叉式升降机的基本结构及工作特点.为获得升降机的结构参数,对其在极限工作状态下的受力情况进行了分析.为进一步确保升降机在极限状态下能够安全的工作,通过有限元软件,对起升机构中叉臂的受力情况进行了仿真分析,结果表明叉臂的强度满足要求.
【总页数】3页(P18-20)
【作者】赵明君;刘剑雄;常安民;李军
【作者单位】昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500;昆明理工大学机电工程学院,云南昆明 650500
【正文语种】中文
【中图分类】TH212
【相关文献】
1.二级剪叉式丝杠升降机构受力分析 [J], 西庆坤;杨德辉;李兴慧;廖波
2.基于ADAMS的液压叉剪式升降机的仿真研究 [J], 何宇;孙瑜
3.基于ADAMS的液压叉剪式升降机的仿真研究 [J], 何宇; 孙瑜
4.某剪叉式升降机构设计计算及有限元仿真 [J], 王辉;郑再象;王世楠;刘龙婷;王维伟;许鹏;陆秋懿
5.基于ADAMS和ANSYS Workbench的AGV剪叉式升降机构的仿真分析研究[J], 徐恒才;李鹭扬
因版权原因,仅展示原文概要,查看原文内容请购买。
剪叉式升降机摘要:剪叉式升降机是一种用于垂直运输及工作于高处的移动设备。
本文将介绍剪叉式升降机的工作原理、结构特点、应用领域以及优势,并探讨其在建筑、物流和仓储等行业中的重要作用。
剪叉式升降机具有高效、安全、稳定的特点,不仅可以提升工作效率,还可以提高工作场所的安全性。
1. 引言剪叉式升降机是一种常见的垂直运输设备,广泛应用于建筑、物流和仓储等行业。
它具有自由升降、移动灵活和载重能力强的特点,被广泛应用于各种高处作业场景中。
2. 工作原理剪叉式升降机采用液压系统作为动力源,通过控制系统控制液压油的流入和流出,从而实现升降运动。
主要由剪叉式臂架、液压缸、油泵、液压管路和控制系统等组成。
液压缸在机构上下升降的过程中,通过液压油的流入和流出来控制高度。
3. 结构特点剪叉式升降机的主要结构特点包括:剪叉式臂架、平台、液压缸和控制系统等。
剪叉式臂架可以保证平台的稳定性和安全性,具有自锁功能,即使在断电情况下,也能保持平台的稳定。
液压缸负责控制升降运动,通过液压油的流动来实现升降功能。
控制系统通过操纵台控制液压系统的动作,实现升降和移动功能。
4. 应用领域剪叉式升降机广泛应用于建筑、物流和仓储等行业。
在建筑行业中,剪叉式升降机可以用于高层建筑的搭设和维修等工作,提高工作效率和安全性。
在物流和仓储行业中,剪叉式升降机可以用于货物的装载和卸载,提高装卸效率。
此外,剪叉式升降机还可以用于电力、通信和航空等领域,满足不同行业的需求。
5. 优势和特点剪叉式升降机具有以下优势和特点:(1) 高效:剪叉式升降机可以快速、平稳地将人员和货物运送到所需的高度,提高工作效率。
(2) 安全:剪叉式升降机采用自锁功能和防止超载等安全装置,确保工作场所的安全性。
(3) 稳定:剪叉式臂架提供了平台的稳定性,即使在高处工作也能保持平衡。
(4) 灵活:剪叉式升降机可以在各种复杂的作业环境中自由移动,适应不同的工作需求。
(5) 承载能力强:剪叉式升降机可以承载大量货物,满足现代物流需求。
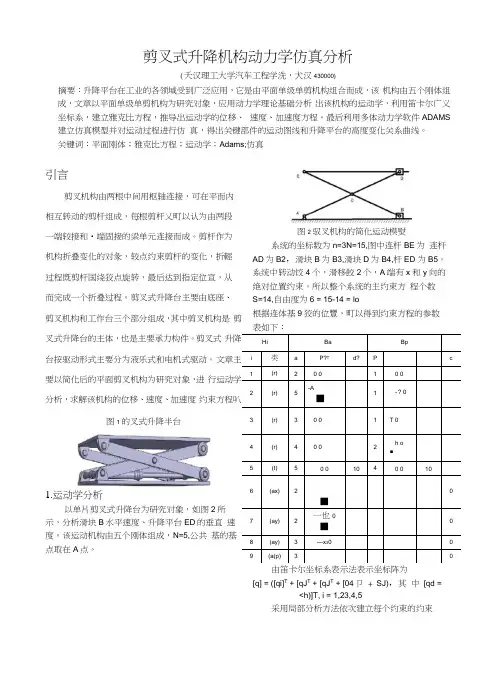
剪叉式升降机构动力学仿真分析(夭汉理工大学汽车工程学洗,犬汉430000)摘要:升降平台在工业的各领域受到广泛应用,它是由平面单级单剪机构组合而成,该机构由五个刚体组成,文章以平面单级单剪机构为研究对象,应用动力学理论基础分析出该机构的运动学,利用笛卡尔广义坐标系,建立雅克比方程,推导出运动学的位移、速度、加速度方程。
最后利用多体动力学软件ADAMS 建立仿真模型并对运动过程进行仿真,得出关键部件的运动图线和升降平台的高度变化关系曲线。
关键词:平面刚体;雅克比方程;运动学;Adams;仿真引言剪叉机构由两根中间用枢轴连接,可在平而内相互转动的剪杆组成,每根剪杆乂町以认为由两段一端较接和•端固接的梁单元连接而成。
剪杆作为机构折叠变化的对彖,较点约束剪杆的变化,折輕过程既剪杆国绕狡点旋转,最后达到指定位宣,从而完成一个折叠过程。
剪叉式升降台主要由底座、图2驭叉机构的简化运动模熨系统的坐标数为n=3N=15,图中连杆BE为连杆AD为B2,滑块B为B3,滑块D为B4,杆ED 为B5。
系统中转动饺4个,滑移餃2个,A端有x 和y向的绝对位置约束。
所以整个系统的主约束方程个数S=14,自由度为6 = 15-14 = lo剪叉机构和工作台三个部分组成,其中剪叉机构是剪叉式升降台的主体,也是主要承力构件。
剪叉式升降台按驱动形式主要分为液乐式和电机式驱动。
文章主要以简化后的平面剪叉机构为研究对象,进行运动学分析,求解该机构的位移、速度、加速度约束方程叭图1的叉式升降半台1.运动学分析以单片剪叉式升降台为研究对象,如图2所示,分析滑块B水平速度、升降平台ED的垂直速度。
该运动机构由五个刚体组成,N=5,公共基的基点取在A点。
Hi Ba Bpi 类 a P?T d? P c1 (r)2 0 0 1 0 02 (r) 5-A■ 1-?03 (r) 3 0 0 1 T 04 (r) 4 0 0 2h o■5 (t) 5 0 0 10 4 0 0 106 (ax) 2■0 7 (ay) 2一也0■08 (ay) 3 —x30 09 (a(p) 3 0 根据连体基9狡的位豐,町以得到约束方程的参数表如下:由笛卡尔坐标系表示法表示坐标阵为[q] = ([qi]T + [qJ T + [qJ T + [04卩 + SJ),其中[qd =<h)]T, i = 1,23,4,5采用局部分析方法依次建立每个约束的约束方程,对于刚体1和2之间的旋转铁有约束方程组:[0T = [r Q ]-[r 訂 + [A«][pJ]-[Aq[p p p ] = 0 (1) 即:画弋H ;:MH 沪貯;:】"对局部约束方程(1)求导得其雅克比:[0;]=([I]2 [H[A ・][P :P] -[I]2 -ffl[A p ][p p q )[0J] = O⑵其中[0』<|I]2 [l][A*][P ;p ])=[;1 匕 3何4(-uh -m[Aq(P ;p ])=[J ; g雅克比右项:[0i t ] = 0[応]JA ・][P ;P][詆卜[A 叫P ;P][4>^] = 0(3)刚体1和5之间的旋转副有:对%、q?关于t 求偏导得到雅克比矩阵:[0^3J = [J ? ol11—10 —sin <l>ih 0 -1— — cos <t>xz得到该约束的雅克比右项:[05tl = 0M] =[A 叫卅][詆卜叶][咐][矶]得到该约束的雅克比右项:[0; J = 0U 12 - h k 2<P a COS <P 5 + — <l> p COS <P 丄 乙 乙 —y (b osin<l>5 + y ^"psincbizz刚体1和3之间的旋转副有:得到该约束的雅克比右项:[Y :] “AQ P F][詆卜約[P j][词cos <t> 2 -sin” 打 sin <t> 3 cos <t> 3 ] cos <t> x-sin 4>x l sin <l>x cos 4*!] » x 3 -X x U1一 y COSy 3 -yil x ..— —sin <i> 2h2 0cos<t>5 sin <t>5—sin <t> 51 COS <l> 5 ]cosG 丄 -sin <t> X 1 [sin ♦x cos <b x J闯氓卜鼬[~2 0 _h. h .X 5— X x — yCOS <P 5 + — COS <P X13 l xy 5- Yi - jsin<b 5 + 亍sin %—y 4>iCOS <t> 1-y 4>;sin% 刚体2和4之间的旋转副有: 肉赵:田囂:将上式对于q 】、qs 求偏导得到雅克比矩阵:1 0[0;qJ =0 1[0;qJ =0 亍 sin4>I 3-1-ysin <i>一 sin <t>4lroicos <t>4 ] lol心][士—sin 4> ° cos 。
剪叉式高空作业平台剪叉臂疲劳寿命分析及预测剪叉式高空作业平台是一种工业机械设备,主要用于高空作业,例如建筑物外墙清洗、维修、漆修、大型场馆内外部维修等。
该平台结构特点是臂架由两个“剪刀臂”组成,可向左右方向伸缩,以便于作业者进行工作。
然而,由于剪叉臂长期承受高频率、大振幅的往返运动,会导致其疲劳寿命的降低,可能会造成安全事故。
因此,本文针对剪叉臂的疲劳寿命进行分析和预测。
1 剪叉臂疲劳失效的原因疲劳失效是由于材料所受到的重复应力而引起的裂纹扩展、损伤和破坏。
对于剪叉臂来说,其疲劳失效主要有以下原因:1.1 剪叉臂重复应力的来源剪叉臂往返运动过程中,充分振幅的频率较高。
频繁地对剪叉臂进行伸缩,导致剪叉臂重复应力较大,尤其是工作条件恶劣时,由于天气、气候等原因会进一步增加剪叉臂的应力。
1.2 剪刀臂关键部件构造的固定为保证剪叉臂稳定,降低部件之间的摩擦力,需要用螺栓将关键部件固定,这样也容易导致剪叉臂重复应力的增加。
1.3 材料的质量剪叉臂是由钢材、合金钢等材料组成,材料质量差会增加疲劳失效的风险。
2 剪叉臂疲劳寿命的分析剪叉臂的疲劳寿命可以通过应力分析、有限元分析(FEA)和模型试验与实验数据分析来验证。
本文重点介绍有限元分析和应力分析。
2.1 有限元分析有限元分析是一种定量的分析方法,其中建立了一组数学模型,以精确计算剪叉臂的压力、应变、位移和疲劳寿命等参数。
该方法是目前最常用的分析剪叉臂疲劳寿命的方法之一。
2.2 应力分析应力分析是一种半定量的分析方法,以测定剪叉臂所受的最大应力值,进而评估其疲劳寿命。
该方法的优点是较低的成本和简单的实现。
通过有限元分析和应力分析,可以预测剪叉臂的疲劳寿命。
这样可以确定最大工作负载和使用寿命的范围,进一步防止剪叉臂应力过大导致安全事故。
由于材料质量和操作环境的影响,实际的寿命可能因情况而异。
4 结论剪叉臂是剪叉式高空作业平台的核心组件,需要定期检查和维护,并确保操作员有相关的训练和经验。
1.前言1.1课题研究的目的和意义升降机是一种升降性能好,适用围广的货物举升机构,可用于生产流水线高度差设备之间的货物运送,物料上线,下线,共件装配时部件的举升,大型机库上料,下料,仓储装卸等场所,与叉车等车辆配套使用,以及货物的快速装卸等。
它采用全液压系统控制,采用液压系统有以下特点:(1)在同等的体积下,液压装置能比其他装置产生更多的动力,在同等的功率下,液压装置的体积小,重量轻,功率密度大,结构紧凑,液压马达的体积和重量只有同等功率电机的12%。
(2)液压装置工作比较平稳,由于重量轻,惯性小,反应快,液压装置易于实现快速启动,制动和频繁的换向。
(3)液压装置可在大围实现无级调速,(调速围可达到2000),还可以在运行的过程中实现调速。
(4)液压传动易于实现自动化,他对液体压力,流量和流动方向易于进行调解或控制。
(5)液压装置易于实现过载保护。
(6)液压元件以实现了标准化,系列化,通用化,压也系统的设计制造和使用都比较方便。
当然液压技术还存在许多缺点,例如,液压在传动过程中有较多的能量损失,液压传动易泄露,不仅污染工作场地,限制其应用围,可能引起失火事故,而且影响执行部分的运动平稳性及正确性。
对油温变化比较敏感,液压元件制造精度要求较高,造价昂贵,出现故障不易找到原因,但在实际的应用中,可以通过有效的措施来减小不利因素带来的影响。
1.2国研究状况及发展前景我国的液压技术是在新中国成立以后才发展起来的。
自从1952年试制出我国第一个液压元件——齿轮泵起,迄今大致经历了仿制外国产品,自行设计开发和引进消化提高等几个阶段。
进年来,通过技术引进和科研攻关,产品水平也得到了提高,研制和生产出了一些具先进水平的产品。
目前,我国的液压技术已经能够为冶金、工程机械、机床、化工机械、纺织机械等部门提供品种比较齐全的产品。
但是,我国的液压技术在产品品种、数量及技术水平上,与国际水品以及主机行业的要求还有不少差距,每年还需要进口大量的液压元件。
剪叉式高空作业平台剪叉臂疲劳寿命分析及预测剪叉式高空作业平台是一种常见的用于高空作业的设备,它的剪叉臂是支撑整个平台结构的重要部件。
随着使用时间的增长,剪叉臂可能会出现疲劳裂纹和损坏,这对操作人员的安全构成了潜在的威胁。
对剪叉臂的疲劳寿命进行分析和预测是非常重要的。
本文将对剪叉式高空作业平台的剪叉臂疲劳寿命进行分析,并提出一种预测方法。
一、剪叉臂疲劳寿命分析剪叉臂是剪叉式高空作业平台的主要结构部件之一,它承担着整个平台的重量和作业过程中的动态荷载。
在使用过程中,剪叉臂会受到很大的应力,长期的工作负载会导致其疲劳寿命的减少。
为了对剪叉臂的疲劳寿命进行分析,需要从以下几个方面进行考虑。
1. 材料性能:剪叉臂一般采用高强度钢材制成,其材料的强度和韧性对疲劳寿命有很大的影响。
通过对材料的拉伸、弯曲和冲击等性能进行测试,可以获得材料的相应性能参数,并用于后续的疲劳寿命分析。
2. 荷载分析:剪叉式高空作业平台在使用过程中会受到动态荷载的作用,如起重物的加减速、平台的升降等。
通过模拟实际工作场景下的荷载作用,并结合材料的特性,可以对剪叉臂的受力情况进行分析,从而得到其疲劳寿命的相关参数。
3. 疲劳损伤分析:在实际使用中,剪叉臂可能会受到疲劳载荷的作用,这会导致其表面产生裂纹和损伤。
通过对疲劳裂纹的扩展规律和损伤形态进行分析,可以得到剪叉臂的裂纹扩展寿命和终点寿命。
通过上述分析,我们可以得到剪叉臂的疲劳寿命参数,并结合实际工作情况,对其进行预测和评估,从而为平台的安全运行提供依据。
在实际工程中,对剪叉臂的疲劳寿命进行预测是非常重要的,可以帮助企业合理制定保养计划和更换周期,从而确保设备的安全运行。
在进行疲劳寿命预测时,可以采用以下方法。
1. 统计分析法:通过对大量实验数据进行统计分析,可以得到剪叉臂疲劳寿命的概率分布特征。
从而可以对未来的疲劳寿命进行预测,并计算出相应的可靠性指标,为企业的运维决策提供参考。
2. 数值模拟法:利用有限元分析等数值模拟方法,可以对剪叉臂在实际工作场景下的受力情况进行计算和分析。
剪叉式液压升降台的有限元分析剪叉式液压升降台是通过液压系统来实现货物起降及搬运的专用设备,其不仅广泛用于厂房维护、工业安装、设备检修物业管理,而且适用于仓库、航空、机场、港口、车站、机械、化工、医药、电子、电力等高空设备安装和检修。
剪叉式液压升降台的结构形式多种多样,从低起升到高起升,组成剪叉臂杆的数目多,液压缸的布置形式多样,其主要由底盘、剪叉机构和工作平台三部分组成,并为中心对称结构[1]。
剪叉机构是升降平台不可或缺的部件之一,因而,剪叉机构的强度及几何尺寸必须合理才能使液压升降平台具有整体的可靠性,从现场剪叉机构的断裂位置来看,其主要损坏部位主要集中在剪叉臂中间销轴的部位[2]。
所以本文先对剪叉臂进行强度分析,然后对简化剪叉式升降台进行模态分析,分析其固有频率和振型,为剪叉式液压升降台的优化和结构设计及维护使用提供参考。
ANSYS Workbench 是ANSYS 公司开发的新一代协同仿真环境,具有协同仿真、项目管理,支持CAD-CAE 间的双向参数传输功能和自动识别复杂装配件接触关系等优点[3]。
本文将在SolidWorks 软件里建立的三维实体模型保存为Parasolid 文件,然后将Parasolid 文件导入ANSYS Workbench 软件,导入后对其进行单元属性、划分网格、施加约束、求解等,建立有限元分析模型。
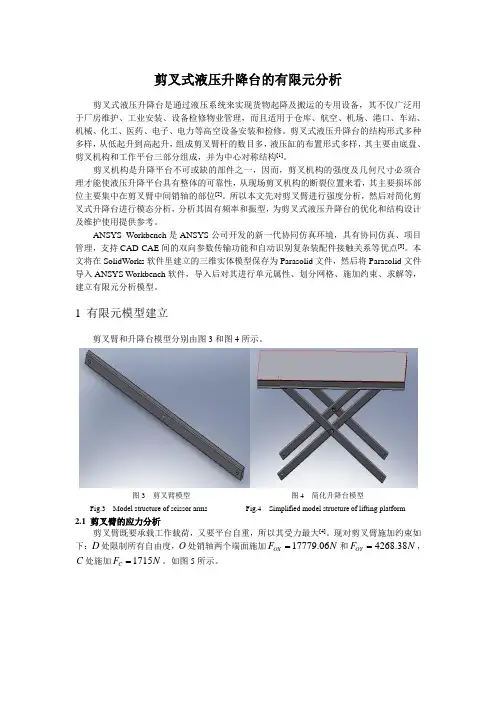
1 有限元模型建立剪叉臂和升降台模型分别由图3和图4所示。
图3 剪叉臂模型 图4 简化升降台模型Fig.3 Model structure of scissor arms Fig.4 Simplified model structure of lifting platform2.1 剪叉臂的应力分析剪叉臂既要承载工作载荷,又要平台自重,所以其受力最大[4]。
现对剪叉臂施加约束如下:D 处限制所有自由度,O 处销轴两个端面施加17779.06OX F N =和4268.38OY F N =,C 处施加1715C F N =。
二级剪叉式丝杠升降机构受力分析西庆坤;杨德辉;李兴慧;廖波【摘要】设计了二级剪叉式丝杠升降机,完成了三维造型和运动仿真模拟,并对二级剪叉式丝杠升降机构进行了动力学分析,利用虚位移原理推导升降机台面载荷和丝杠推力之间的关系公式;通过对整机和单个剪叉杆的受力分析,建立了二级剪叉式丝杠升降机构的力学模型.以一台大型升降机为例,分析剪叉杆的受力情况,利用MATLAB软件计算剪叉杆的受力大小,并对剪叉杆的强度进行校核.经现场实际测试验证,该二级剪叉式丝杠升降机结构稳定.为剪叉式丝杠升降机的设计分析提供了理论.%The secondary scissoring screw lifter was designed,its 3D model and motion emulation and dynamic analysis were completed in ing virtual displacement principle,the relationship formula between the lifter's table load and screw thrust were derivea.Moreover,mechanical model of the lifting mechanism was established by analyzing stress analysis of the whole lifter and single scissor lever.For example,in a large scissoring screw lifter,the scissor lever's stress under Matlab was calculated after analyzing its stress conditions,and then the scissor lever's strength waschecked.Actual field-testing results show that the structure of the scissoring screw lifter is stable,and theoretical fundament is provided for the further design and analysis of the scissoring screw lifter.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)005【总页数】4页(P222-225)【关键词】剪叉式机构;丝杠;受力分析;强度校核【作者】西庆坤;杨德辉;李兴慧;廖波【作者单位】四川工程职业技术学院机电工程系,四川德阳618000;四川工程职业技术学院机电工程系,四川德阳618000;四川工程职业技术学院机电工程系,四川德阳618000;四川工程职业技术学院机电工程系,四川德阳618000【正文语种】中文【中图分类】TH16;TH211剪叉叉式升降机具有结构简单、运行平稳、操作简便等优点,广泛应用在汽车制造、航空航天、交通运输及各种升降设备中[1-2]。
1.前言1.1课题研究的目的和意义升降机是一种升降性能好,适用范围广的货物举升机构,可用于生产流水线高度差设备之间的货物运送,物料上线,下线,共件装配时部件的举升,大型机库上料,下料,仓储装卸等场所,与叉车等车辆配套使用,以及货物的快速装卸等。
它采用全液压系统控制,采用液压系统有以下特点:(1)在同等的体积下,液压装置能比其他装置产生更多的动力,在同等的功率下,液压装置的体积小,重量轻,功率密度大,结构紧凑,液压马达的体积和重量只有同等功率电机的12%。
(2)液压装置工作比较平稳,由于重量轻,惯性小,反应快,液压装置易于实现快速启动,制动和频繁的换向。
(3)液压装置可在大范围内实现无级调速,(调速范围可达到2000),还可以在运行的过程中实现调速。
(4)液压传动易于实现自动化,他对液体压力,流量和流动方向易于进行调解或控制。
(5)液压装置易于实现过载保护。
(6)液压元件以实现了标准化,系列化,通用化,压也系统的设计制造和使用都比较方便。
当然液压技术还存在许多缺点,例如,液压在传动过程中有较多的能量损失,液压传动易泄露,不仅污染工作场地,限制其应用范围,可能引起失火事故,而且影响执行部分的运动平稳性及正确性。
对油温变化比较敏感,液压元件制造精度要求较高,造价昂贵,出现故障不易找到原因,但在实际的应用中,可以通过有效的措施来减小不利因素带来的影响。
1.2国内研究状况及发展前景我国的液压技术是在新中国成立以后才发展起来的。
自从1952年试制出我国第一个液压元件——齿轮泵起,迄今大致经历了仿制外国产品,自行设计开发和引进消化提高等几个阶段。
进年来,通过技术引进和科研攻关,产品水平也得到了提高,研制和生产出了一些- 1 -具先进水平的产品。
目前,我国的液压技术已经能够为冶金、工程机械、机床、化工机械、纺织机械等部门提供品种比较齐全的产品。
但是,我国的液压技术在产品品种、数量及技术水平上,与国际水品以及主机行业的要求还有不少差距,每年还需要进口大量的液压元件。
剪刀叉升降机力矩计算公式
剪刀叉升降机是一种常见的机械装置,用于提升和降低重物。
在计算剪刀叉升降机的力矩时,需要考虑到各个部件的力和力臂的
作用。
以下是力矩计算的一般公式:
力矩 = 力× 力臂。
其中,力是施加在杠杆上的力,力臂是力作用点到转轴的垂直
距离。
对于剪刀叉升降机,力矩的计算涉及到吊臂、升降机构等部件。
具体的力矩计算公式会根据具体的剪刀叉升降机结构和工作原理而
有所不同。
一般来说,需要考虑到各个部件受力的方向、力的大小
以及力臂的长度等因素。
在实际应用中,可以根据剪刀叉升降机的具体参数和工作条件,利用上述的力矩计算公式来进行力矩的计算。
通过合理的力矩计算,可以帮助工程师和操作人员更好地设计和使用剪刀叉升降机,确保
其安全可靠地运行。
总之,剪刀叉升降机的力矩计算涉及到多个部件和参数,需要综合考虑各种因素,以确保计算的准确性和可靠性。
希望以上回答能够满足你的需求。
1文献综述进入21 世纪以后, 随着经济的发展和需求的提高, 对物流行业提出越来越高的要求。
剪叉式举升机构具有结构紧凑、承载量大、通过性强和操控性好的特点,因此在现代物流、航空装卸、大型设备的制造与维护中得到广泛应用[1]。
升降机通常采用液压驱动,所以又叫液压升降机,整机由主机、液压系统、电气系统组成。
液压升降机是一种相对简单,且适应能力很强的起重机械。
与其他起升设备相比,它速度低,能精确定位在各种高度,适合于不需要经常性提升货物的场所。
按功能来分,液压升降平台可分为起重平台及维修安装平台。
最新的液压升降平台还装备了行走机构,可在轨道上行驶,在仓库中被广泛用作拣货设备。
升降机种类丰富,类型繁多,总的来讲,按照升降结构的不同,可分为剪叉式升降机、升缩式升降机、套筒式升降机、升缩臂式升降机及折臂式升降机等。
其中剪式又分为单剪支臂液压机和双剪支臂液压机两种型式。
单剪支臂液压机的起重能力为500—10000kg;双剪支臂液压机有两种,一种是两个剪式支臂平行布置,另一种是两个剪式支臂垂直串联。
平行布置的剪式支臂液压机用来提升车辆或长大件货物,垂直布置支臂的液压机用在提升高度较大的场合[2]。
本次根据任务内容,着重介绍剪叉式液压升降机。
1.1世界升降机发展现状和升降机发展趋向近20年世界工程升降机行业发生了很大变化。
RT(越野轮胎升降机)和AT(全地面升降机)产品的迅速发展,打破了原有产品与市场格局,在经济发展及市场激烈竞争冲击下,导致世界工程升降机市场进一步趋向一体化。
目前世界工程升降机年销售额已达75亿美元左右。
主要生产国为美国、日本、德国、法国、意大利等,世界顶级公司有10多家,主要集中在北美、日本(亚洲)和欧洲。
美国既是工程升降机的主要生产国,又是最大的世界市场之一。
但由于日本、德国升降机工业的迅速发展及RT和AT产品的兴起,美国厂商在20世纪60~70年代世界市场中占有的主导地位正逐步受到削弱,从而形成美国、日本和德国三足鼎立之势。
剪叉式提升机构受力特性分析刘俊谊;杨刚;张万军;陈徐均;沈海鹏【摘要】为了对三级剪叉式提升机构的受力特性进行分析研究,首先将其简化为二级剪叉式机构,并利用虚位移原理和力学分析方法对简化后机构的轴力、弯矩和应力等进行了推导与分析,得到了机构受力与起升荷载、起升角度的关系式.然后结合对三级剪叉式机构受力特性的有限元仿真,得到了简化前后2种机构的受力特性曲线.最后对比分析发现:虽然简化后机构各点的受力特性会发生改变,但是机构中剪叉臂的轴向应力和剪切应力的最大值变化不大,剪叉臂所受的最大弯曲应力近似为简化前的2.3倍,并且这些应力的最大值均随着起升角度的增加而非线性地减小.因此,可以通过计算二级剪叉机构中的相关应力来估算三级剪叉机构中的应力.【期刊名称】《解放军理工大学学报(自然科学版)》【年(卷),期】2014(015)002【总页数】6页(P133-138)【关键词】起重机械;剪叉式机构;受力分析【作者】刘俊谊;杨刚;张万军;陈徐均;沈海鹏【作者单位】解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007;总装工程兵驻无锡地区军事代表室,江苏无锡214151;解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007【正文语种】中文【中图分类】TH211剪叉式升降机是一种结构简单、运行平稳、操作简便的高空作业设备,被广泛应用于航空航天、交通运输、冶金、汽车制造等领域[1~3]。
剪叉式提升机构是剪叉式升降机的关键组成部分,可使升降台具有较高的稳定性和承载力[4],近年来很多学者对其进行了研究。
Dong等[5]运用实验与建模的方法对剪叉机构的动力稳定性进行了研究,得到了剪叉式机构的动力稳定性随其柔度的增大而减小等结论。
郭凯等[6]基于齐次坐标变换法,提出了一种对平面变比例剪叉式机构进行建模与分析的通用性方法,该方法为机构设计优化、动力设计和驱动设计提供了依据和基础。
赵明君等[7]对极限状态下的起升机构受力情况进行了有限元分析。
同样,基于有限元软件,周莎莎等[8]对剪叉式液压升降平台的剪叉臂结构进行了优化分析,得到了最合理的结构和尺寸,并节省了大量材料。
胥军等[9]通过对一种常见的剪叉式升降机举升机构进行运动学和力学分析,实现了对其关键结构参数的校核与优化,不仅大幅降低了系统对油缸的推力要求,还提高了液压系统的驱动效率。
然而,由于三级剪叉式机构结构复杂,对其受力进行理论分析较为困难,因此目前的研究大多针对二级剪叉式机构,而对于三级剪叉式机构的研究较少。
本文通过将三级剪叉机构简化为二级剪叉机构的方法,对其在起升过程中的一般受力特性进行分析,然后通过与ANSYS建模仿真结果的对比,说明简化方法的合理性并得到一些有价值的结论。
1 组成及力学分析剪叉式机构是一种组合式的多杆机构,其基本组成单元为X形剪叉式机构。
将X形单元以串联、并联等不同形式进行连接,则可以形成不同的剪叉式机构。
如将2个X形基本单元串联得到二级剪叉式机构,将3个X形基本单元串联得到三级剪叉式机构,如图1所示。
以此类推,可以得到四级、五级剪叉式机构等。
图1 不同形式的剪叉式机构Fig.1 Different types of scissor mechanisms下面以三级剪叉式机构为例说明其工作原理。
由于X形剪叉机构具有等距对称性和运动相似性,当在最下端X形单元的首铰链处施加水平向内的推力时,其上部X形单元的各铰链点均向内向上运动。
由于最上端的末铰链处与上部输出结构相连,并可沿上部结构水平移动,所以剪叉式提升机构可以将水平方向的推力转化为竖直向上的运动。
1.1 几何关系如图2所示,h为剪叉机构上下固定铰间的距离;r为剪叉臂的短臂长;R=2r为剪叉臂的长臂长;θ为剪叉臂与水平方向所夹锐角;l为首铰链点或末铰链点到中轴线的距离。
图2所示相关量的几何关系可表示为图2 剪叉机构的几何关系图Fig.2 Geometrical relations on scissor mechanisms1.2 推力计算设在水平推力F作用下的虚位移为dl,在起升荷载Q作用下的虚位移为dh,分别将式(1)(2)左右两端对θ求导,得由虚位移原理,得1.3 力学分析三级剪叉式机构由双叉结构(图2中粗实线部分)和8字形结构(图2中细实线部分)组成。
由于三级剪叉式机构铰接点较多、受力复杂,所以考虑将其简化为双叉结构(二级剪叉机构)进行受力分析。
二级剪叉式机构中的推力与起升荷载同样满足式(6),下面对其轴力、弯矩等受力特性进行推导与分析。
1.3.1 双叉结构中各节点的受力分析由于剪叉机构具有对称性,所以取机构的一半进行研究,其受力分析如图3所示。
图3 剪叉臂受力分析图Fig.3 Force diagram of scissor mechanism arms图3 中点1、3和点4、6分别为剪叉臂a和b的端部铰接点;点2和5分别为剪叉臂a和b的中间铰接点。
Q0为剪叉臂a端部铰接点1处所承受的起升荷载;F0为剪叉臂b端部铰接点6处所受的水平推力。
由于铰接点3和4的受力互为作用力和反作用力,因此有根据式(6)并结合图2,可得由剪叉臂a和b分别在x和y方向上的受力平衡关系,得对铰链点3、4分别取矩并简化,得1.3.2 剪叉臂所受轴力及力矩的计算对于剪叉臂a,其1-2段和2-3段所受轴力分别为取剪叉臂a左半部分进行分析,可得点2处所受力矩为对于剪叉臂b,其4-5段和5-6段所受轴力分别为取剪叉臂b左半部分进行分析,可得点5处所受力矩化为在求得了点2和点5处的弯矩后,可求出剪叉臂在各铰点处所受的弯曲应力,式中:σiw为铰点i处剪叉臂所受的弯曲应力;Wix为铰点i处剪叉臂的抗弯截面系数;Mi为铰点i处剪叉臂所受的弯矩,Iix为铰点i处剪叉臂截面绕中性轴的惯性距;ymax为横截面上距中性轴最远的距离。
1.4 剪叉臂间连接件的力学分析通过分析可以发现,剪叉臂a中铰点2、3处连接件所受的剪力分别为剪叉臂b中铰点5和6处连接件所受的剪力分别为剪叉臂间采用销轴连接方式时,销轴主要承受剪力作用。
铰点i处单销所受的切应力为式中:Ni为铰点i处单销所受的剪力;Ai为i铰点处销轴的截面面积。
2 模型仿真与结果分析2.1 模型的建立以某种机动式抢通桥墩的剪叉式提升机构为例,对三级剪叉机构进行有限元仿真与力学特性分析。
该剪叉式提升机构由两组三级剪叉式机构并联组成,剪叉臂间通过单销与耳板进行铰接。
剪叉臂的材料为15MnTi,销轴的材料为高强度钢材40Cr,它们的截面尺寸和相应尺寸下的材料特性如表1、2所示,表1中各变量的含义如图4所示。
与底座接触的剪叉臂截面采用1类截面,其他剪叉臂采用2类截面。
铰点5,6,K 及其对称位置采用直径d1=60mm的单销,其他铰点采用直径为d2=42mm的单销。
该机构的其他技术参数如下:起升荷载Q=60kN;短臂长r =2m;提升机构在工作过程中,18°=θ1≤θ≤θ2=55°。
表1 剪叉臂截面尺寸表Tab.1 Sectional dimensions of scissor mechanismarms mm?表2 材料特性表Tab.2 Material characteristics MPa?根据以上相关参数,利用ANSYS建立如图5所示三级剪叉式机构模型,其中剪叉臂采用beam3梁单元进行模拟。
2.2 结果的比较与分析简化机构中,最大轴向应力出现在2-3段和5-6段;剪叉臂的最大弯曲应力出现在点2和5处;单销的最大剪切应力出现在点5处。
而由仿真结果知:三级剪叉机构中最大轴向应力出现在J-6段和G-I段;剪叉臂的最大弯曲应力出现在点G处;单销的最大剪切应力出现在点6处。
将它们相应部分的应力进行对比,可得到表3及图6~8。
上标(2)表示二级剪叉机构;上标(3)表示三级剪叉机构。
图4 铰接点处剪叉臂截面图Fig.4 Profile of scissor mechanism arms on hinge points图5 三级剪叉式机构模型图Fig.5 Model of three-level scissor mechanism 表3 2种机构中应力最大值的比较Tab.3 Comparison of maximum stresses in both mechanisms?结合图6和表3可知:简化前后各段的轴向应力(图中为轴向应力的数值大小)有所变化,且发生最大轴向应力的位置改变,由于仿真结果与计算结果较为接近,因此可以用该简化计算的结果近似估计三级剪叉机构的最大轴向应力。
此外,2种机构中最大轴向拉压应力均随着θ的增大而非线性地减小,且其值均远小于轴向应力的容许值。
图6 剪叉臂轴向应力的比较Fig.6 Comparison of axial stresses in scissor mechanism arms结合图7和表3可知:简化前后,点2、5处的弯曲应力发生了显著变化,简化后剪叉臂所受最大弯曲应力的计算结果是仿真结果的2.3倍左右;剪叉臂的最大弯曲应力均随着θ的增大而非线性地减小。
此外,结合图6、7可以发现,剪叉臂所能承受的起升荷载主要由其弯曲应力决定。
分析图8可以发现与图6类似的规律,即简化前后铰接点处连接件的剪切应力有所变化,但简化前后它们的最大值基本不变;连接件的最大剪切应力随着θ的增大而非线性地减小,且小于其容许值。
图6中,在达到某一起升角度后,三级剪叉机构J-6段轴向应力的值会大于二级剪叉机构的5-6段;图8中,三级剪叉机构点6处单销的剪切应力始终大于二级时的值,且在达到某一起升角度后,其值相对最大。
这是因为2种机构中点6处在竖直方向上的受力不同,二级机构中点6处竖直方向上的受力为Q0,而三级机构中其竖直方向上的受力是随起升角度变化的(由仿真结果知)。
图7 剪叉臂弯曲应力的比较Fig.7 Comparison of bending stresses in scissor mechanism arms图8 单销剪切应力的比较Fig.8 Comparison of shear stresses in pins综上可以得出以下主要结论:(1)三级剪叉机构中剪叉臂的轴向应力和弯曲应力以及连接件所受的剪切应力的最大值均随着起升角度的增加而非线性地减小。
(2)可以通过计算二级剪叉机构中应力的最大值来近似估算三级剪叉机构中应力的最大值。
2种机构中剪叉臂的轴向应力、连接件的剪切应力的最大值近似相等,而在二级机构中剪叉臂所受的最大弯曲应力近似是在三级机构中的2.3倍。
(3)将三级剪叉机构简化为二级剪叉机构后,不一定每点的受力都会变大,某些点的应力值可能会小于三级剪叉机构的情况。