第4章雷达侦察的信号处理
- 格式:ppt
- 大小:5.15 MB
- 文档页数:200


雷达侦察信号处理的分布式软件架构设计雷达侦察信号处理的分布式软件架构设计随着科技的不断发展,雷达技术在军事、航空航天、气象、海洋等领域得到广泛应用。
作为一种重要的无源探测技术,雷达可以通过接收和处理被探测目标反射的电磁波,实现对目标的探测与跟踪。
在雷达系统中,信号处理是实现高性能和高精度目标检测与跟踪的关键环节之一。
本文将介绍雷达侦察信号处理的分布式软件架构设计,以提高系统的可靠性、灵活性和扩展性。
一、需求分析在进行分布式软件架构设计之前,首先需要对雷达侦察信号处理系统的需求进行分析。
雷达系统对信号处理的要求通常包括:1)实时性:信号处理算法需要在较短的时间内完成,以满足实时目标检测与跟踪的需求;2)可靠性:系统需要具备良好的容错能力,以应对硬件故障或软件错误带来的影响;3)灵活性:系统需要支持不同类型和参数的雷达信号处理算法,并能够方便地进行算法切换和升级;4)扩展性:系统需要支持多雷达同时工作,实现多波束处理和多目标跟踪等功能。
二、分布式软件架构设计基于以上需求,设计出一种分布式软件架构,可以将信号处理任务分配到不同的处理单元进行并行处理,提高系统的处理性能和响应速度。
该架构主要包括以下几个模块:数据采集模块、分布式任务调度模块、分布式处理模块和结果合并模块。
1. 数据采集模块数据采集模块负责从雷达系统中获取原始信号数据,并将其传输给分布式任务调度模块。
在设计上,可以采用高速接口和协议,提高数据传输的效率和实时性。
2. 分布式任务调度模块分布式任务调度模块负责将接收到的数据进行分包,然后将分包的任务分配给不同的处理单元进行并行处理。
为了协调分布式处理单元的工作,可以采用一种任务调度算法,根据每个处理单元的处理能力和当前的任务负载情况,选择合适的处理单元进行任务分配。
3. 分布式处理模块分布式处理模块是整个系统的核心。
它包括多个处理单元,每个处理单元负责接收分配给自己的任务,然后进行信号处理算法的计算。
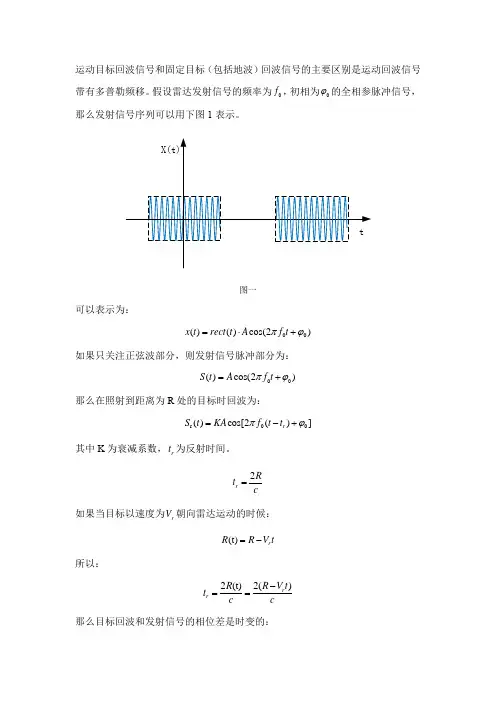
运动目标回波信号和固定目标(包括地波)回波信号的主要区别是运动回波信号带有多普勒频移。
假设雷达发射信号的频率为0f ,初相为0ϕ的全相参脉冲信号,那么发射信号序列可以用下图1表示。
图一可以表示为:00()()cos(2)x t rect t A f t πϕ=⋅+如果只关注正弦波部分,则发射信号脉冲部分为:00()cos(2)S t A f t πϕ=+那么在照射到距离为R 处的目标时回波为:r 00()cos[2()]r S t KA f t t πϕ=-+其中K 为衰减系数,r t 为反射时间。
2r R t c= 如果当目标以速度为r V 朝向雷达运动的时候:(t)r R R V t =-所以:2()2(t)r r R V t R t c c-== 那么目标回波和发射信号的相位差是时变的:0024()/c r r f t f R V t ϕππ=-=--当目标是运动的时候,发射与接收的信号之间有一个频率差,用d f 表示:21d =2d r d V f t ϕπλ=⨯ 假设基频为0f 雷达信号经过反射之后变为0d f f +,接收之后对信号进行数字下变频(DDC )将原有的信号的载频0f 去除,获得只含有频移d f 的信号。
图二 所以在全相参雷达中,可以使用正交相位检波器来获得中频信号的基带信号()x t ,有时也称()x t 为中频信号的复包络。
即:(t)()=()+j ()()j I Q x t x t x t a t e ϕ=上式中:()()cos (t)()()sin (t)I Q x t a t x t a t ϕϕ==通过低通滤波器之后,输出的双正交通道信号分别为:()()cos (t)(t)cos(2)()()sin (t)(t)sin(2)I d Q d x t a t Ka f t x t a t Ka f t ϕπϕπ====脉冲压缩: 此时正交两路信号为经过调制(线性调制,非线性调制或相位编码)的大时宽带宽信号。
《雷达对抗原理》(赵国庆著)课后答案免费下载《雷达对抗原理》(赵国庆著)内容提要第1章雷达对抗概述1.1 雷达对抗的基本概念及含义1.1.1 雷达对抗的含义及重要性1.1.2 雷达对抗的基本原理及主要技术特点1.1.3 雷达对抗与电子战1.2 雷达对抗的信号环境1.2.1 现代雷达对抗信号环境的特点1.2.2 信号环境在雷达对抗设备中的描述和参数1.3 雷达侦察概述1.3.1 雷达侦察的任务与分类1.3.2 雷达侦察的技术特点1.3.3 雷达侦察设备的基本组成1.4 雷达干扰概述1.4.1 雷达干扰技术的分类1.4.2 雷达干扰设备的基本组成习题一参考文献第2章雷达信号频率的测量2.1 概述2.1.1 雷达信号频率测量的重要性2.1.2 测频系统的主要技术指标2.1.3 现代测频技术分类2.2 频率搜索接收机2.2.1 搜索式超外差接收机2.2.2 射频调谐晶体视频接收机2.2.3 频率搜索形式2.2.4 频率搜索速度的选择2.3 比相法瞬时测频接收机2.3.1 微波鉴相器2.3.2 极性量化器的基本工原理2.3.3 多路鉴相器的并行运用2.3.4 对同时到达信号的分析与检测2.3.5 测频误差分析2.3.6 比相法瞬时测频接收机的组成及主要技术参数 2.4 信道化接收机2.4.1 基本工作原理2.4.2 信道化接收机存在的问题2.4.3 信道化接收机的特点和应用 2.5 压缩接收机2.5.1 Chirp变换原理2.5.2 表声波压缩接收机的工作原理 2.5.3 压缩接收机的参数2.6 声光接收机2.6.1 声光调制器2.6.2 空域傅立叶变换原理2.6.3 声光接收机的工作原理2.6.4 声光接收机的主要特点习题二参考文献 ?第3章雷达的方向测量和定位3.1 概述3.1.1 测向的目的3.1.2 测向的方法3.1.3 测向系统的主要技术指标3.2 振幅法测向3.2.1 波束搜索法测向技术3.2.2 全向振幅单脉冲测向技术3.2.3 多波束测向技术3.3 相位法测向3.3.1 数字式相位干涉仪测向技术3.3.2 线性相位多模圆阵测向技术3.4 对雷达的定位3.4.1 单点定位3.4.2 多点定位习题三参考文献 ?第4章雷达侦察的信号处理4.1 概述4.1.1 信号处理的任务和主要技术要求 4.1.2 信号处理的基本流程和工作原理 4.2 对雷达信号时域参数的'测量4.2.1 tTOA的测量4.2.2 PW的测量4.2.3?AP的测量4.3 雷达侦察信号的预处理4.3.1 对已知雷达信号的预处理4.3.2 对未知信号的预处理4.4 对雷达信号的主处理4.4.1 对已知雷达信号的主处理4.4.2 对未知雷达信号的主处理4.5 数字接收机和数字信号处理4.5.1 数字接收机4.5.2 数字测频4.5.3 数字测向4.5.4 信号脉内调制的分析习题四参考文献 ?第5章雷达侦察作用距离与截获概率5.1 侦察系统的灵敏度5.1.1 切线信号灵敏度PTSS和工作灵敏度POPS的定义 5.1.2 切线信号灵敏度PTSS的分析计算5.1.3 工作灵敏度的换算5.2 侦察作用距离5.2.1 简化侦察方程5.2.2 修正侦察方程5.2.3 侦察的直视距离5.2.4 侦察作用距离Rr对雷达作用距离Ra的优势 5.2.5 对雷达旁瓣信号的侦察5.3 侦察截获概率与截获时间5.3.1 前端的截获概率和截获时间5.3.2 系统截获概率和截获时间习题五参考文献第6章遮盖性干扰6.1 概述6.1.1 遮盖性干扰的作用和分类6.1.2 遮盖性干扰的效果度量6.1.3 最佳遮盖干扰波形6.2 射频噪声干扰6.2.1 射频噪声干扰对雷达接收机的作用6.2.2 射频噪声干扰对信号检测的影响6.3 噪声调幅干扰6.3.1 噪声调幅干扰的统计特性6.3.2 噪声调幅干扰对雷达接收机的作用 6.3.3 噪声调幅干扰对信号检测的影响 6.4 噪声调频干扰6.4.1 噪声调频干扰的统计特性6.4.2 噪声调频干扰对雷达接收机的作用 6.4.3 噪声调频干扰对信号检测的影响 6.5 噪声调相干扰6.5.1 噪声调相干扰的统计特性6.5.2 影响噪声调相干扰信号效果的因素 6.6 脉冲干扰习题六参考文献第7章欺骗性干扰7.1 概述7.1.1 欺骗性干扰的作用7.1.2 欺骗性干扰的分类7.1.3 欺骗性干扰的效果度量7.2 对雷达距离信息的欺骗7.2.1 雷达对目标距离信息的检测和跟踪7.2.2 对脉冲雷达距离信息的欺骗7.2.3 对连续波调频测距雷达距离信息的欺骗 7.3 对雷达角度信息的欺骗7.3.1 雷达对目标角度信息的检测和跟踪7.3.2 对圆锥扫描角度跟踪系统的干扰7.3.3 对线性扫描角度跟踪系统的干扰7.3.4 对单脉冲角度跟踪系统的干扰7.4 对雷达速度信息的欺骗7.4.1 雷达对目标速度信息的检测和跟踪7.4.2 对测速跟踪系统的干扰7.5 对跟踪雷达AGC电路的干扰7.5.1 跟踪雷达AGC电路7.5.2 对AGC控制系统的干扰习题七参考文献第8章干扰机构成及干扰能量计算8.1 干扰机的基本组成和主要性能要求8.1.1 干扰机的基本组成8.1.2 干扰机的主要性能要求8.2 干扰机的有效干扰空间8.2.1 干扰方程8.2.2 干扰机的时间计算8.3 干扰机的收发隔离和效果监视8.3.1 收发隔离8.3.2 效果监视8.4 射频信号存储技术8.4.1 模拟储频技术(ARFM)8.4.2 数字储频技术(DRFM)8.5 载频移频技术8.5.1 由行波管移相放大器构成的载频移频电路 8.5.2 由固态移相器构成的载频移频电路习题八参考文献第9章对雷达的无源对抗技术9.1 箔条干扰9.1.1 箔条干扰的一般特性9.1.2 箔条的有效反射面积9.1.3 箔条的频率响应9.1.4 箔条干扰的极化特性9.1.5 箔条回波信号的频谱9.1.6 箔条的战术应用9.2 反射器9.2.1 角反射器9.2.2 龙伯透镜反射器9.3 假目标和雷达诱饵9.3.1 带有发动机的假目标9.3.2 火箭式雷达诱饵9.3.3 投掷式雷达诱饵9.3.4 拖曳式雷达诱饵9.4 隐身技术习题九参考文献《雷达对抗原理》(赵国庆著)目录该书系统介绍了雷达对抗的基本原理,系统的组成,应用的主要技术等。
雷达原理简介首先,大家必须先了解雷达的基本原理,因为雷达仍是目前用来侦测移动物体最普遍的方法.雷达英文为RADAR,是Radio Detection And Ranging的缩写.所有利用雷达波来侦测移动物体速度的原理,其理论基础皆源自于“多谱勒效应”,其应该也是一般常见的多谱勒雷达(Doppler Radar),此原理是在19世纪一位澳地利物理学家所发现的物理现像,后来世人为了纪念他的贡献,就以他的名字来为该原理命名.都卜勒的理论基础为时间.波是由频率及振幅所构成,而无线电波是随着波而前进的.当无线电波在行进的过程中,碰到物体时,该无线电波会被反弹,而且其反弹回来的波,其频率及振幅都会随着所碰到的物体的移动状态而改变.若无线电波所碰到的物体是固定不动的,那么所反弹回来的无线电波其频率是不会改变的.然而,若物体是朝着无线电线发射的方向前进时,此时所反弹回来的无线电波会被压缩,因此该电波的率频会随之增加;反之,若物体是朝着远离无线电波方向行进时,则反弹回来的无线电波,其频率则会随之减小.速度侦测装置(即台湾警方所使用的测速雷达)所应用的原理,就是可以侦测到发射出现的无线电波,及反弹回来的无浅电波其间的频率变化.由这两个不同频率的差值,便可以依特定的比例关系,而计算是该波所碰撞到物体的速度.当然,此种速度侦测装置可以将所侦测到的速度,转换为「公里/小时」或是「英哩/小时」.也许大家还是无法体会什么是「都卜勒效应」,但每个人在日常生活中应该都有「听」过「都卜勒效应」.例如:当火车鸣笛或救护车的警报声一直朝着你接近时,会发现声音会一直在变化,这就是所谓的「都卜勒效应」,此例子是生活中最常见的例子,因为当声波一直朝着你接近时,该声波的频率会一直增加,所以听到的声音才会一直变.这跟测速雷达所用到的原理是一样的,只不过测速雷达所使用的不是声波,而是无线电波.由于警方的测速雷达总是侦测到一个较强的反单电波后,才决定该移动物体(车子)的速度;而通常体积较大的物体其反弹的电波也较强;另外,离发射电波较近的物体,其所反弹的电波也会较强.根据这个原理,若有两辆大小相同的车子,同样都是超速时,测速雷达只会侦测到开在较前面车子的速度;若有一辆未超速的大卡车开在前方,而另一辆已超速的小客车开在后方时,测速雷达是无法侦测出该小客车已超速,除非该小客车已经超越了大卡车而继续超速.这告诉我们,利用雷达波来侦测车速时,是无法在车阵中,侦测到特定车辆的速度,而只能侦测到开在车阵最前面,且体积较大的车子的速度.雷达(radar)原是“无线电探测与定位”的英文缩写。
雷达信号处理技术与系统设计第一章绪论1.1 论文的背景及其意义近年来,随着电子器件技术与计算机技术的迅速发展,各种雷达信号处理技术的理论与应用研究成为一大热门领域。
雷达信号的动目标检测(MAD)是利用动目标、地杂波、箔条和气象干扰在频谱上的差别,抑制来自建筑物、山、树、海和雨之类的固定或低速杂波信号。
区分运动目标和杂波的基础是它们在运动速度上的差别,运动速度不同会引起回波信号频率产生的多普勒频移不相等,这就可以从频率上区分不同速度目标的回波。
固定杂波的中心频率位于零频,很容易设计滤波器将其消除。
但对于运动杂波,由于其多普勒频移未知,不能像消除固定杂波那样很容易地设计滤波器,其抑制就变得困难了从本质上来讲,雷达信号的检测问题就是对某一坐标位置上目标信号“有”或“无”的判断问题。
最初,这一任务由雷达操作员根据雷达屏幕上的目标回波信号进行人工判断来完成。
后来,出现了自动检测技术,一开始为固定或半固定门限检测,这种体制下当干扰和杂波功率水平增加几分贝,虚警概率将急剧增加,以至于显示器画面饱和或数据处理过载,这时即使信噪比很大,也不能作出正确的判断。
为克服这些问题进而发展了自适应恒虚警(Constant FalseAlarm Rate,CFAR)检测。
CFAR 检测使得雷达在多变的背景信号中能够维持虚警概率的相对稳定,这种虚警概率的稳定性对于大多数的雷达,如搜索警戒雷达、跟踪雷达、火控雷达等。
第二章 雷达信号数字脉冲压缩技术2.1 引言雷达脉冲压缩器的设计实际上就是匹配滤波器的设计。
根据脉冲压缩系统实 现时的器件不同,通常脉冲压缩的实现方法分为两类,一类是用模拟器件实现的 模拟方式,另一类是数字方式实现的,主要采用数字器件实现。
脉冲压缩处理时必须解决降低距离旁瓣的问题,否则强信号脉冲压缩的旁瓣 会掩盖或干扰附近的弱信号的反射回波。
这种情况在实际工作中是不允许的。
采 用加权的方法可以降低旁瓣,理论设计旁瓣可以达到小于-40dB 的量级。