人机工程与人之因素评分标准
- 格式:xls
- 大小:52.50 KB
- 文档页数:3


人机工程学与人因工程:从理论到实践人机工程学和人因工程是一门涉及人体、心理、计算机和工程学等多个领域的交叉学科,旨在研究如何更好地设计和改善人机交互系统,以提高人的工作效率和生活质量。
本文将从理论和实践两个层面分别探讨人机工程学和人因工程的重要性、应用范围及发展趋势。
一、理论探讨人机工程学是指研究人机交互过程的科学,它从人类行为、认知和情感等方面出发,考虑软硬件界面的互动效果,使人和机器之间的沟通变得更加方便、安全和高效。
人机工程学的理论基础主要来自于人类工效学、心理学和生理学等学科的成果。
人因工程是指以人为中心的工程学,其中包括人类因素、人因机器界面、场所规划、健康与安全、非技术因素等各个方面。
人因工程试图将人机系统视为整体,注重人的感知、认知和行为等方面,以保证工程系统的可用性和可操作性。
人因工程的理论基础主要来自于心理学、人类工效学和工程学等学科的成果。
从理论上来看,人机工程学和人因工程具有丰富的理论体系和方法论,这些理论在实际应用中具有重要意义。
比如,任务分析、流程分析、人类信息处理等方法都为优化界面设计和工作流程提供了理论基础。
而人体工程学、人类可用性工程学等方面的理论也为优化人机界面提供了技术支持。
二、实践探讨人机工程学和人因工程的应用范围非常广泛,包括了计算机软硬件、工业生产、机器人技术、医疗保健、航空、交通、运动竞技、军事、教育、文化等多个领域。
以下以一些典型的应用案例为例,进一步阐述两者在实践中的应用。
1、医疗保健在医疗保健领域,人机工程学和人因工程可以有效地改善医疗设备的设计和使用体验,减少医务人员的劳动强度和工作负担,提高病人的治疗效果和安全性。
如,手术机器人、远程监控设备、智能床垫等医疗设备的研发,离不开的支持。
此外,药品包装、标签设计、使用指南的编写也需要考虑易读性、易操作性等人机交互方面的因素。
2、智能家居在智能家居领域,人机工程学和人因工程可以改善家居产品的用户体验和操作便利性,促进智能家居产业的可持续发展。

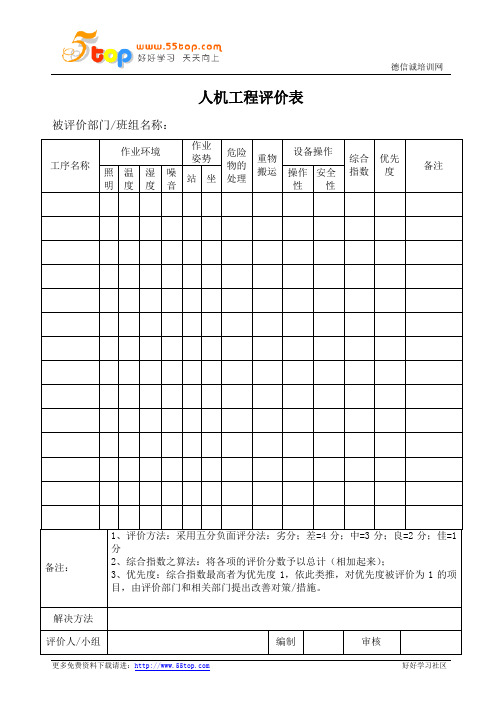
人机工程与人之因素评价表
序號
1 2 3 4 5 6
車間
作业环境
作业名称
照明温度湿度
辦公區11 1
收放料作业31 1
机台调机11 1
药水室11 1
工程维修11 1
药水领用、
添加11 1
评价部门:
作业姿势
噪音站坐弯腰/下蹲
1 1 1 0
1 0 1 0
2 0 1 1
1 0 0 0
1 1 0 1
1 1 0 2
评价日期:年月日
其它因素
综合指数
优先
备注
视力重复动作搬运重量安全性度
1 2 1 1 11 2
1 1 0 1 10 1
1 3 1 3 14 2
1 2 0 3 10 1
1 3 1 3 13 2
1 2 2 2 14 2
7 質量檢測 1 1 1 0 0 2 2 1 1 1 1 11 2
备注1.评价方法:采用五分负面评分法:劣=5分;差 =4分;可 =3 分;良 =2分;佳 =1分;
2.综合指数之算法:将各项的评价分数予以总计(相加起来);
3.评分标准:综合指数为大于30 时优先度为5;综合指数为21-30 时优先度为4;综合指数为16-20 时优先度为3;综合指数为11-15 时优先度为2;综合指数小于 10时优先度为 1;
4.优先度:评价指数最高者为优先度5,依此类推,对优先度被评价为1的项目,由评价部门和相关部门对其提出改善对策/ 措施。
人机工程因素控制方案:。

《人机工程学》课程标准1课程信息2课程性质与定位1、课程性质:工业设计是现代社会工业产品竞争力的核心要素,是实现高、新技术产业化的重要手段,是科技创新不可缺少的另一翼。
它不仅指产品外观的美化,更包括对人的因素、环境生态、技术前景、社会变革等高层次的理解,被誉为“21世纪最有前途的科学”。
工业设计的主体是产品设计。
工业设计的核心是“以人为中心”。
用户的需求和喜好在产品开发设计过程中需得到更大关注。
产品不仅要满足功能要求、美学要求,更要满足使用者的安全、舒适,有利于健康和操作的得心应手,以及环境保护的要求。
因此,如何寻找人-机-环境间的最佳匹配关系,探索工业产品“以人为中心”的设计理念、设计手段与方法,成为现代工业设计必须关注的重要课题。
人机工程学是实现“以人为中心”的设计思想的重要理论基础,是衡量当代产品设计水平的重要指标。
随着科学技术的发展,“以人为中心”的理念已成为设计产品系统的主要目标,人机工程学已成为设计学科领域中的主要研究方向,成为工业设计的主要理论基础和设计理念。
将人的因素融入到产品开发的整个过程中,关注产品的使用者,确保产品易于使用、学习、生产和安全,提高产品的使用性和质量。
2、课程的目的和任务:人机工程学是一门重要的专业基础课,它既有系统的理论基础知识又有很强的实践性。
通过本课程的学习,要使学生掌握有关人的生理、心理、人体测量、人的作业方式、人的状态和人机系统分析的基本原理、人机系统分析和设计的程序和方法等,以便从人体工程学的角度,理性地处理工业设计问题。
为进入专业课程打下良好基础。
3课程目标4学习任务(情境)本课程注重以学生的设计制作应用能力作为课程考核的关键容,并结合学生的设计表述与沟通能力进行考核。
考核以学生课程中设计制作的作品作为主要考核依据,注重职业能力的培养。
所以考核为过程性考核。
考核容包括平时成绩、项目设计成绩综合评定,平时成绩包括平时出勤、课堂表现(纪律、学习态度、回答问题等)、职业素质(严谨善于交流、吃苦耐劳、团队意识)。

人因工程深入应用及人机绩效评价准则---Process Simulate常用人因分析工具模型准备并导入ps模型整理&创建数字人体动作建模人因工程分析确定仿真对象及仿真内容动作建模确定仿真对象及仿真内容模型整理&创建数字人体人因工程分析模型准备并导入psTC集成方式离线方式模型准备并导入ps模型整理&创建数字人体动作建模人因工程分析确定仿真对象及仿真内容模型准备并导入ps模型整理&创建数字人体动作建模人因工程分析确定仿真对象及仿真内容You can select any ghost model and modify its position or delete it.You can configure the Task Simulation Builder to consider selected objects to be obstacles and to be avoided when planning human model motion. For example, if you set a table to be an obstacle, you will not have to implement a via point to prevent the human model from walking through the table. For more information, refer to Manage walk obstaclesYou can use the Get task to have the model pick up or grasp an object within the scene. You can define which hand(s) to use or let the Task Simulation Builder solve it for you. You can also choose to override the solved destination, if the human model needs to walk to the object, and specify exactly where it should stand. You can also use Via Postures to specify the exact path for the model to follow when reaching for the object. This is especially useful if you wish to define a collision-free path for the human model.The Put task enables you to move a grasped object to a new location. For example, if the human model picked up a tool, you can use the Put task to take it to a workstation. Task Simulation Builder can solve all the actions for the Put, or you can choose to define a specific walk path as well as preferred postures to Put the object.Position tasks are similar to Put tasks -the difference is that the human continues to hold the object at the end of a Position task. This is useful, for example, when using a power tool to fasten a part. You can position the tool at the first fastener location, and at subsequent locations. The human continues to hold the power tool at each Position task.Pose tasks enables you to posture and move the human model in any way you need, and assign a time-frame for the task. A Pose task can consist of a single posture, or you can define several postures to create a motion sequence. This task is helpful for simulating activities that are not easily represented by the other Task Simulation Builder task types. For example, you can use Pose tasks to show the human in transition from a sitting to a standing position.If you have a license for the Motion Capture toolkit, you can also link a video to a Pose task for enhanced editing of motion sequences. For example, you can use Posture Recorder to record the exact motion you require and then link then a corresponding video to the Pose. With the video playing alongside the Pose motions, you can then review, split, and insert additional tasks within the sequence.The Regrasp task enables updating the human’s grasp of an object at any point within the simulation. This task lets you change which hand(s) grasp an object. You can also change the location/orientation of the object as well as the grasp or posture of the human.Note:The duration for a Regrasp task is very brief. If you wish to show a motion (with a specific duration), it is recommended to insert a Position or Pose task prior to regrasping. For example, if the human model needs to bend or stand up and then regrasp, first move the human model to the necessary position and then add a Regrasp task.At any point during a simulation, you can switch the position of the human model from sitting to standing and vice versa. This task does not include any type of motion for the model, it simply changes the ‘state’ so that all tasks added after switching recognize the new state (sitting or standing). In order to simulate the motion of sitting or standing, you can use the Pose task.The Wait task lets you insert waiting time in your simulation time-line to account for pauses. For example, after walking to the conveyor, the human needs to wait for the part to arrive. This does not cause any change in the previously defined task.Using Touch tasks you can select an object that the human model needs to touch, for example, to press a button to activate a conveyor. A Touch activity may include a walk to get to the final Touch destination. You can define the final posture and insert via postures to specify a path to implement the Touch activity.Using the Apply force task, you can transfer the force (and weight) associated with an object to a human model. The human posture updates according to the forces applied during the task, reflecting the level of exertion. The human model transitions smoothly in and out of these exertion postures. Forces applied during these tasks are reflected in the ergonomic reports generated using the Task Simulation Builder. You can add and edit forces (define them as reaction forces) using the Load and Weights command (Configuring loads and weights for a human event).确定仿真对象及仿真内容模型准备并导入ps模型整理&创建数字人体动作建模人因工程分析施加于工人身体的静态/动态负荷主要影响肌肉骨骼系统•疲劳恢复分析Fatigue and Recovery•能量代谢分析Metabolic EnergyExpenditure•搬运受力分析NIOSH•静态强度预测Static Strength Prediction•下背部载荷分析Lower Back Analysis•臂力评估Arm Strength Evaluation•受力分析Force Solver•时间分析报告Timing Report•快速上肢评估Rapid Upper LimbAssessment (RULA )•人体姿态分析OWAS大部分工具主要依据National Institute for Occupational Safety and Health(美国职业安全与健康协会,简称NIOSH)发布的人工操作实际指导而开发的分析系统。