河北工程大学机械原理期末考试试卷及答案
- 格式:doc
- 大小:145.50 KB
- 文档页数:6
机械原理试卷一、填空及选择题(每空1分,共20分)1.机器的制造单元是___________,运动单元是__________;机构具有确定运动的条件是其自由度数等于___________数。
2.曲柄摇杆机构有死点位置时,__________是主动件,此时_______与__________共线。
3.一对渐开线标准直齿圆柱齿轮正确啮合的条件是_____________。
4.斜齿轮的模数和压力角在__________(法面、端面、轴面)内取标准值;锥齿轮当量齿数Z V=______________。
5.蜗杆机构传动的主动件是__________(蜗杆、蜗轮、蜗杆蜗轮皆可)。
6.移动副中驱动力作用于______内将发生自锁;传动副中驱动力为一单力且作用于_______内将发生自锁。
7.质量分布在同一平面内的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面内的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
8.机器周期性速度波动的调节方法一般是加装________________,非周期性速度波动调节方法是除机器本身有自调性的外一般加装 ____________。
9. 说出两种变回转运动为直线运动的机构:______, _______。
1.零件、构件、原动件-------------------------------------------------------------------3分2.摇杆连杆从动曲柄----------------------------------------------------------------3分3.模数相等,压力角相等----------------------------------------------------------------1分4.法面 Z /cosδ------------------------------------------------------------------------1分5.蜗杆蜗轮皆可----------------------------------------------------------------------------1分6.摩擦角摩擦圆------------------------------------------------------------------------2分7.一定一定不一定一定----------------------------------------------------------1分8.飞轮调速器----------------------------------------------------------------------------2分9.曲柄滑块齿轮齿条----------------------------------------------------------------2分二、计算图示机构的自由度(5分)F=3×7-2×10-0=1三、如下图所示行程速度变化系数为1 的曲柄摇杆机构,已知曲柄连架杆固定铰链中心处图示机架平面(直线OO’)位置上,并已知摇杆的两个极限位置C1D,C2D及摇杆长度CD= C1D=C2D,求其余三个构件的杆长。
《机械原理》试卷参考答案开课单位:机械工程学院,考试形式:闭卷,允许带 计算器、绘图仪器 入场题序 一 二 三 四 五 六 七 八 总 分 得分 评卷人一、是非题(共10分,每小题2分,对者在括号内打“√”,错者打“×”)得分︳ 1、(× ) 当机构的自由度数小于机构的原动件数时,机构将具有确定的相对运动。
2、(√ ) 不论刚性转子上有多少个不平衡质量,也不论它们如何分布,只需在任意选定的两个平面内,分别适当地加一平衡质量,即可达到动平衡。
3、(× ) 在其他参数不变的前提下,槽面摩擦较平面摩擦的摩擦力较大,是因为前者摩擦系数较大。
4、(√ ) 在移动副中,当驱动力作用线在摩擦锥之内,则发生自锁。
5、(√ ) 对于单自由度的机械系统,若选定等效构件为移动件时,其等效质量是按等效前后动能相等的条件进行计算的。
二、填空题(共10分,每空1分)得分︳1、飞轮主要用以调节 周期性 速度波动,若不考虑其他因素,只为了减小飞轮尺寸和重量,应将其安装在 高速 轴上。
2、刚性转子的静平衡就是要使 惯性力 之和为零;而刚性转子的动平衡则要使 惯性力 之和及 惯性力偶矩 之和均为零。
3、三个彼此作平面相对运动的构件共有 3 个瞬心,且必位于 同一直线 上。
4、在机构运动分析的速度多边形中,机架的速度影像是 极点 。
速度影像和加速度影像原理只适用 于 同一构件 。
5、当机械的效率0≤η时,机构则发生 自锁 。
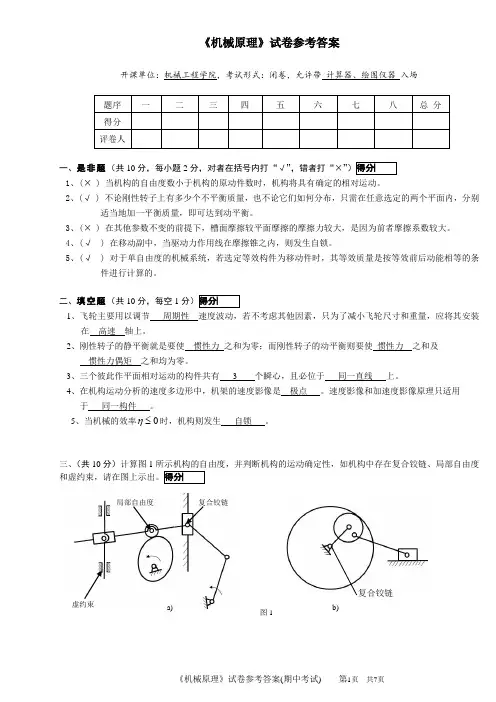
三、(共10分)计算图1所示机构的自由度,并判断机构的运动确定性,如机构中存在复合铰链、局部自由度和虚约束,请在图上示出。
得分︳图1虚约束局部自由度复合铰链复合铰链b)a)四、(共20分)图2所示为铰链四杆机构的机构运动简图,已知连架杆1为主动件,匀速转动,角速度101=ωrad/s ,转向如图示。
各构件长度分别为:AB=30,BC=40,CD=50,AD=60 (单位为:mm),构件AB 的方位角为60o ,ABE 为等边三角形。
河北工程大学机械设计AB卷期末试题《机械设计》试卷一.选择题(每题2分,共20分)1.在带、链、齿轮组成的多级传动中,带传动应放在。
①低速级②高速级③高速级或低速级均可2.悬臵螺母的主要作用是。
①作为联接的防松装臵②减小螺栓系统的刚度③使螺母中各圈螺纹受力较均匀④防止螺栓受弯曲载荷3.非液体滑动轴承,其润滑状态通常为。
①边界润滑②流体润滑③混合润滑4.为了保证轴承内圈与轴肩端面的良好接触,轴承的圆角半径r 与轴肩处的圆角半径r l应的关系。
①r=r l;②r>r1;③r<="" p="">5、某角接触球轴承内径为45mm,精度等级为P0级,宽度系列为代号为0,直径系列为中系列,接触角为25o,其代号为___________。
①.7145②.6209③7309AC④.7209C6.键的截面尺寸(b×h)通常是根据按标准选择。
①轴传递扭矩的大小②传递功率的大小③轮毂的长度④轴的直径7.蜗杆传动热平衡计算的目的是为了控制温升,防止。
①蜗杆机械性能下降②润滑油粘度降低和齿面胶合③传动效率下降④蜗轮材料退火8.被联接件受轴向力作用时,如果采用普通螺栓联接,则螺栓可能出现的失效为:。
①剪切破坏②拉断③扭断④拉断或拧紧时扭断9.联轴器和离合器的主要作用是。
①缓和冲击和振动②补偿两轴间可能的位移③联接两轴,传递扭矩④防止机器发生过载10.为提高螺栓在变载荷作用下的疲劳强度,可采取的措施。
①增大螺栓刚度②适当减小预紧力③减小螺栓刚度④减小被联接件刚度二.填空题(每题2分,共20分)1.滚动轴承基本额定寿命是指该型轴承有%发生失效前的总工作转数。
2.带传动的设计准则是。
3.直齿圆锥齿轮的强度可近似按进行强度计算。
4.闭式软齿面齿轮传动一般按设计,按校核。
5.在设计图纸上注明某链条的标记为“18A-2×80”,其中“18A”代表,“80”代表。
机械原理试卷一、填空及选择题(每空1分,共20分)1.机器的制造单元是______,运动单元是__________;机构具有确定运动的条件是其自由度数等于_________数。
2.曲柄摇杆机构有死点位置时,__________是主动件,此时_______与__________共线。
3.一对渐开线标准直齿圆柱齿轮正确啮合的条件是_____________。
4.斜齿轮的模数和压力角在__________(法面、端面、轴面)取标准值;锥齿轮当量齿数Z V=______________。
5.蜗杆机构传动的主动件是__________(蜗杆、蜗轮、蜗杆蜗轮皆可)。
6.移动副中驱动力作用于______将发生自锁;传动副中驱动力为一单力且作用于_______将发生自锁。
7.质量分布在同一平面的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
8.机器周期性速度波动的调节方法一般是加装________________,非周期性速度波动调节方法是除机器本身有自调性的外一般加装____________。
9. 说出两种变回转运动为直线运动的机构:______,_______。
1.零件、构件、原动件-------------------------------------------------------------------3分2.摇杆连杆从动曲柄----------------------------------------------------------------3分3.模数相等,压力角相等----------------------------------------------------------------1分4.法面Z / cosδ------------------------------------------------------------------------1分5.蜗杆蜗轮皆可----------------------------------------------------------------------------1分6.摩擦角摩擦圆------------------------------------------------------------------------2分7.一定一定不一定一定----------------------------------------------------------1分8.飞轮调速器----------------------------------------------------------------------------2分9.曲柄滑块齿轮齿条----------------------------------------------------------------2分二、计算图示机构的自由度(5分)F=3×7-2×10-0=1三、如下图所示行程速度变化系数为1 的曲柄摇杆机构,已知曲柄连架杆固定铰链中心处图示机架平面(直线OO’)位置上,并已知摇杆的两个极限位置C1D,C2D及摇杆长度CD= C1D=C2D,求其余三个构件的杆长。
机械原理期末题库(本科类)一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
机械原理试卷一、填空及选择题(每空1分,共20分)1.机器的制造单元是___________,运动单元是__________;机构具有确定运动的条件是其自由度数等于___________数。
2.曲柄摇杆机构有死点位置时,__________是主动件,此时_______与__________共线。
3.一对渐开线标准直齿圆柱齿轮正确啮合的条件是_____________。
4.斜齿轮的模数和压力角在__________(法面、端面、轴面)内取标准值;锥齿轮当量齿数Z V=______________。
5.蜗杆机构传动的主动件是__________(蜗杆、蜗轮、蜗杆蜗轮皆可)。
6.移动副中驱动力作用于______内将发生自锁;传动副中驱动力为一单力且作用于_______内将发生自锁。
7.质量分布在同一平面内的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面内的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
8.机器周期性速度波动的调节方法一般是加装________________,非周期性速度波动调节方法是除机器本身有自调性的外一般加装____________。
9. 说出两种变回转运动为直线运动的机构:______,_______。
1.零件、构件、原动件-------------------------------------------------------------------3分2.摇杆连杆从动曲柄----------------------------------------------------------------3分3.模数相等,压力角相等----------------------------------------------------------------1分4.法面Z / cosδ------------------------------------------------------------------------1分5.蜗杆蜗轮皆可----------------------------------------------------------------------------1分6.摩擦角摩擦圆------------------------------------------------------------------------2分7.一定一定不一定一定----------------------------------------------------------1分8.飞轮调速器----------------------------------------------------------------------------2分9.曲柄滑块齿轮齿条----------------------------------------------------------------2分二、计算图示机构的自由度(5分)F=3×7-2×10-0=1三、如下图所示行程速度变化系数为1 的曲柄摇杆机构,已知曲柄连架杆固定铰链中心处图示机架平面(直线OO’)位置上,并已知摇杆的两个极限位置C1D,C2D及摇杆长度CD= C1D=C2D,求其余三个构件的杆长。
机械原理试卷一、填空及选择题(每空1分,共20分)1.机器的制造单元是______,运动单元是__________;机构具有确定运动的条件是其自由度数等于_________数。
2.曲柄摇杆机构有死点位置时,__________是主动件,此时_______与__________共线。
3.一对渐开线标准直齿圆柱齿轮正确啮合的条件是_____________。
4.斜齿轮的模数和压力角在__________(法面、端面、轴面)内取标准值;锥齿轮当量齿数Z V=______________。
5.蜗杆机构传动的主动件是__________(蜗杆、蜗轮、蜗杆蜗轮皆可)。
6.移动副中驱动力作用于______内将发生自锁;传动副中驱动力为一单力且作用于_______内将发生自锁。
7.质量分布在同一平面内的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面内的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
8.机器周期性速度波动的调节方法一般是加装________________,非周期性速度波动调节方法是除机器本身有自调性的外一般加装____________。
9. 说出两种变回转运动为直线运动的机构:______,_______。
1.零件、构件、原动件-------------------------------------------------------------------3分2.摇杆连杆从动曲柄----------------------------------------------------------------3分3.模数相等,压力角相等----------------------------------------------------------------1分4.法面Z / cosδ------------------------------------------------------------------------1分5.蜗杆蜗轮皆可----------------------------------------------------------------------------1分6.摩擦角摩擦圆------------------------------------------------------------------------2分7.一定一定不一定一定----------------------------------------------------------1分8.飞轮调速器----------------------------------------------------------------------------2分9.曲柄滑块齿轮齿条----------------------------------------------------------------2分二、计算图示机构的自由度(5分)F=3×7-2×10-0=1三、如下图所示行程速度变化系数为1 的曲柄摇杆机构,已知曲柄连架杆固定铰链中心处图示机架平面(直线OO’)位置上,并已知摇杆的两个极限位置C1D,C2D及摇杆长度CD= C1D=C2D,求其余三个构件的杆长。
机械原理考试复习题一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
30.为减小凸轮机构的压力角,可采取的措施有和。
机械原理期末题库(本科类)一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
郛⅛黑■羹叵出世堂K ∙M窸⅛黑“曲师”“敦A O 塞基“质信 送热网H 第定“除坡 轴)鼎⅛⅛卿(a)张S痂卦 脓#卦O T O Z科目 九械原取 试卷类型 考试班理21、凸轮机构中,基圆半任越小,凸轮机构的压力角 ___ 。
A 、越大B 、越小C 、不变22、如图3所示轮系,该轮系的自由度是 ___ 。
A 、-1B 、1 Cx 2 D 、O23、渐开线标准直齿圆柱齿轮,分度圆上的齿厚 ____ 齿槽宽。
A 、等于B 、小于C 、大于D 、二者无关24、负变位渐开线宜齿圆柱齿轮,分度网上的齿厚 ______ 齿槽宽。
A 、大于B 、小于C 、等于D 、二者无关25、如图3所示轮系,已知齿轮1和齿轮2的齿数相等,行星架H 转1圈,行星轮1四、(12分)在图示钱链四杆机构中,已知砧=5Omm 、∕cι>=35mm. ∕ad = 30 mm, AD 为机架,并且:1、若此机构为曲柄摇杆机构, 且AB 为曲柄,求∕AB 的最大值;2、若此机构为双摇杆机构, 且AB 为最短杆,试确定∕ab 的取值范围.五、《15分)图示为一凸轮机构,凸轮的实际廊线为一个圆,要求:I 、说出该凸轮机构的名称;2、在图上画出凸轮的理论现线、偏距圆、基圆并标出基 圆半径大;3、标出在。
点接触时凸轮机构的压力角a 和从动件在。
六、(14分)在图示轮系中,已知各轮齿数为:Zi= 20, Z 2= 40,Z 31=IOO, 口 = 40, Z 5 =20,齿轮 5 的转速“s = 600r∕min,转 向如图所示,求齿轮1的转速小的大小,并确定其与齿轮 5的转向关系。
七、(12分)在某项技术革新中需要采用一对外啮合圆柱齿轮传动,其中心距为144mm,传动比为2。
目前零件库房中存有四种现成的齿轮,已知它们都是国产的正常齿制 渐开线标准齿轮,压力角都是20°。
这四种齿轮的齿数Z 和齿顶01直径d “分别为:(1) ∑∣=24, ⅛∣=104mm: (2) Z2=48, d"?=25Omn1; (3) zj=48f d“a=20Omn1: (4)入=47, dz=196mm°试分析能否从这四种齿轮中选出符合要求的一对齿轮来?然⅛黑D ∙r ∙隼叵B世逑E M H耶⅛堞 然⅛‹ “中卦 "8毂,ZO≡1A淳正型H鬟三“般建轴)鼎⅛⅛卿(⅛)张S痂卦 脓#卦OTOZ点时从动件的位移s,问答题(每小题3分,共12分)1、m l = m2↑a x = a2;不一定能。
机械原理期末考试题及答案一、选择题(每题2分,共20分)1. 机械运动的五个基本要素是:大小、方向、作用点、速度和()。
A. 加速度B. 位移C. 力D. 时间答案:A2. 机械效率是有用功与()之比。
A. 总功B. 额外功C. 有用功D. 机械功答案:A3. 机械运动中,若位移与时间的比值保持不变,则该运动为()。
A. 匀速直线运动B. 变速直线运动C. 匀加速直线运动D. 曲线运动答案:A4. 在理想情况下,机械能守恒的条件是()。
A. 只有重力做功B. 只有弹力做功C. 只有摩擦力做功D. 只有重力和弹力做功答案:D5. 机械振动的周期是指完成一次全振动所需的时间,其单位是()。
A. 米B. 秒C. 牛顿D. 焦耳答案:B6. 机械系统中,若要减小系统的惯性,则可以()。
A. 增加质量B. 增加转动惯量C. 减小转动惯量D. 增加转动半径答案:C7. 机械系统中,若要提高系统的刚度,则可以()。
A. 增加系统的柔度B. 增加系统的阻尼C. 减小系统的柔度D. 增加系统的惯性答案:C8. 机械系统中,若要提高系统的稳定性,则可以()。
A. 增加系统的阻尼B. 减小系统的阻尼C. 增加系统的柔度D. 减小系统的惯性答案:A9. 机械系统中,若要提高系统的响应速度,则可以()。
A. 增加系统的阻尼B. 减小系统的阻尼C. 增加系统的柔度D. 减小系统的惯性答案:D10. 机械系统中,若要减小系统的振动,则可以()。
A. 增加系统的阻尼B. 减小系统的阻尼C. 增加系统的柔度D. 减小系统的惯性答案:A二、填空题(每题2分,共20分)1. 机械运动的三个基本要素是:大小、方向和______。
答案:作用点2. 机械效率的计算公式为:η= ______/总功。
答案:有用功3. 机械运动中,若位移与时间的比值保持不变,则该运动为______。
答案:匀速直线运动4. 在理想情况下,机械能守恒的条件是只有______和弹力做功。
机械原理期末题及答案5篇第一篇:机械原理期末题及答案一、欢迎大家来下载.是非题(用“Y”表示正确,“N”表示错误填在题末的括号中)。
(本大题共10小题,每小题1分,总计10分)1.机构具有确定相对运动的条件为:其的自由度F 0。
(n)2.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。
(y)3.在摆动导杆机构中,若取曲柄为原动件时,机构的最小传动角γ而取导杆为原动件时,则机构的最小传动角γminmin=0º;=90º。
(n)4.机构当出现死点时,对运动传递是不利的,因此应设法避免;而在夹具设计时,却需要利用机构的死点性质。
(y)5.当其它条件不变时,凸轮的基圆半径越大,则凸轮机构的压力角就越小,机构传力效果越好。
(y)6.在蜗杆传动中,蜗杆的升角等于蜗轮的螺旋角,且蜗杆与蜗轮的螺旋线旋向相同。
(y)7.渐开线直齿圆锥齿轮的标准参数取在大端上。
(y)8.为了减小飞轮的尺寸,在机器的低速轴上安装飞轮后,可以较好地降低机器的速度波动。
(n)9.机器等效动力学模型中的等效质量(或转动惯量)是一个假想质量(或转动惯量),它不是原机器中各运动构件的质量(或转动惯量)之和,而是根据动能相等的原则转化后计算得出的。
(y)10.不论刚性回转体上有多少个不平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
(y)二、填空题(将正确的答案填在题中横线上方空格处)。
(本大题共5小题,每空2分,总计10分)1.速度影像的相似原理只能应用于同一构件上的各点,而不能应用于机构的不同构件上的各点。
2.机械中三角带(即V带)传动比平型带传动用得更为广泛,从摩擦角度来看,其主要原因是:三角带属槽面摩擦性质,当量摩擦系数较平面摩擦系数大,故传力大。
BC=40,CD=60,AD=60,AD为机架,该机构是:3.在四杆机构中AB=40,曲柄摇杆机构。
4.用作图法绘制直动从动件盘形凸轮廓线时,常采用反转法。
(完整版)机械原理期末题库(附答案)(完整版)机械原理期末题库(附答案)机械原理期末题库(本科类)一、填空题: 1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36o,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
机械原理试卷
一、填空及选择题(每空1分,共20分)
1.机器的制造单元是___________,运动单元是__________;机构具有确定运动的条件是其自由度数等于___________数。
2.曲柄摇杆机构有死点位置时,__________是主动件,此时_______与__________共线。
3.一对渐开线标准直齿圆柱齿轮正确啮合的条件是_____________。
4.斜齿轮的模数和压力角在__________(法面、端面、轴面)内取标准值;锥齿轮当量齿数Z V=______________。
5.蜗杆机构传动的主动件是__________(蜗杆、蜗轮、蜗杆蜗轮皆可)。
6.移动副中驱动力作用于______内将发生自锁;传动副中驱动力为一单力且作用于_______内将发生自锁。
7.质量分布在同一平面内的回转体,经静平衡后_______________(一定、不一定、一定不)满足动平衡,经动平衡后___________(一定、不一定、一定不)满足静平衡;质量分布于不同平回转面内的回转体,经静平衡后____________(一定、不一定、一定不)满足动平衡,经动平衡后____________(一定、不一定、一定不)满足静平衡。
8.机器周期性速度波动的调节方法一般是加装________________,非周期性速度波动调节方法是除机器本身有自调性的外一般加装____________。
9. 说出两种变回转运动为直线运动的机构:______,_______。
1.零件、构件、原动件-------------------------------------------------------------------3分
2.摇杆连杆从动曲柄----------------------------------------------------------------3分
3.模数相等,压力角相等----------------------------------------------------------------1分
4.法面Z / cosδ------------------------------------------------------------------------1分
5.蜗杆蜗轮皆可----------------------------------------------------------------------------1分
6.摩擦角摩擦圆------------------------------------------------------------------------2分
7.一定一定不一定一定----------------------------------------------------------1分
8.飞轮调速器----------------------------------------------------------------------------2分
9.曲柄滑块齿轮齿条----------------------------------------------------------------2分
二、计算图示机构的自由度(5分)
F=3×7-2×10-0=1
三、如下图所示行程速度变化系数为1 的曲柄摇杆机构,已知曲柄连架杆固定铰链
中心处图示机架平面(直线OO’)位置上,并已知摇杆的两个极限位置C1D,C2D及摇杆长度CD= C1D=C2D,求其余三个构件的杆长。
(8 分)
四、如图所示凸轮机构,凸轮廓为以A为圆心,R为半径的圆,凸轮逆时针方向回
转,要求:(10分)
1.说出该凸轮机构的名称;
2.标出凸轮基圆半径r0;
3.标出从动件从B点接触到C点接触凸轮转过的角度Φ;
4.标出从动件从B点接触到C点接触从动件位移S;
5.标出从动件从B点接触时从动件压力角αB;
它是偏置直动滚子从动件盘形凸轮机构-五、一对直齿圆柱齿轮机构,已知压力角α=20度,齿轮2的齿数Z2=28,模数
m=3mm ,传动比i 12=2,安装中心距a’=65mm ,求:(15分)
1.齿轮1的齿数Z 1;
2.两轮分度圆半径r 1,r 2;
3.啮合角α’,两轮节圆半径r ’1,r ’2;
4.设计该传动类型;
5.计算分度圆齿厚S 1,S 2;
角度 INV α tg α cos α
20 0.015 0.364 0.94 18.5 0.012 0.335 0.948
24.4 0.028 0.454 0.9191
28.5 0.046 0.543 0.879
六、图示复合轮系中,各齿轮齿数如图中括号中所示,求传动比i 1H 。
(10分)
解-------------------------------------------------------------------------------------------10分 区分轮系----------------------------------------------------5分
行星轮系H K
------541321' 分别计算----------------------------------------------------5分 在K ---321中
20
60233113-=-=--=z z n n n n i k k K 在H ---541'中 30605''1515'1-=-=--=
z z n n n n i H H K 211==H
H n n i
七、图示曲柄滑块机构中,曲柄1上作用驱动力距M ,滑块3上作用阻力F 。
若不
计各活动构件质量,标出机构在图示位置时各运动副总反力作用线(给定摩擦角)(8分)
φ
八、某内燃机的曲柄输出力矩M d与曲柄转角φ关系曲线如图所示,运动周期为
T=180度,曲柄转速为600r/min,如用此内燃机驱动一阻力为常量的机械,并要求不均匀系数δ=0.01,求在主轴上应装的飞轮转动惯量J F(不考虑其它构件的转动惯量)(9分)
摆动导杆机构,已知机构运动简图,原动件为1以等角速度ω1逆时针方向回转,用相对运动图解法求在图示位置时,
1)构件3的角速度ω3,角加速度α3的大小及方向;
2)构件3 上D 点的速度和加速度的大小和方向;
(注:所求各量大小用公式表示,不必计算出数值大小)(15分)
AB B B r B B k B B B B n B B AB B B B B B l a a b k k b b b b b BD BD
A B BC C B a a a a a V l V b b pb pb BD
AB BC V V V 212332233''32
32323332323
2232
323'''
'''''//00//ωππωωωτ==⊥→⊥→++=+====⊥⊥+=
机械原理试卷答案
二.解:------------------------------------------------------------------------------------------5
分
F=3×7-2×10-0=1
三.解:------------------------------------------------------------------------------------------8分AB+BC=AC2=42.5
BC-AB=AC1=20.5, ∴AB =11, BC =31.5
四.解-------------------------------------------------------------10分3)它是滚子从动件盘形凸轮机构------------------------------2分
4)如图所示------------------------------------------------2分
5)如图所示------------------------------------------------2分
6)如图所示------------------------------------------------2分
7)如图所示------------------------------------------------2分
五、解-------------------------------------------------------------15分
1)i12 = z2 /z1 =2 z1 =14
2)r1 =1/2 mz1 =21mm r2 =1/2 mz2 =42mm
3)cosα’=a/a’cosα=63/65 cos20
r’1=65/63r1r’2=65/63r2
4)采用正传动
5)S1=m(π/2+2x1tgα)
八、解--------------------------------------------------------------------------------------------9分
W d=0.5×π/6 ×300+π/6×300+0.5×2π/3 ×300=175π
[W] =1/2W d =87.5π
J F=900[W]/δπ2n2 =6.966。