重庆大学机械原理期末试卷
- 格式:pdf
- 大小:312.44 KB
- 文档页数:3
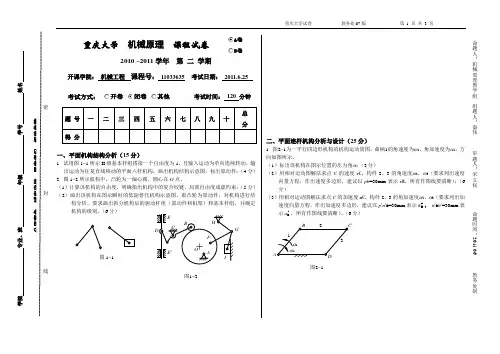
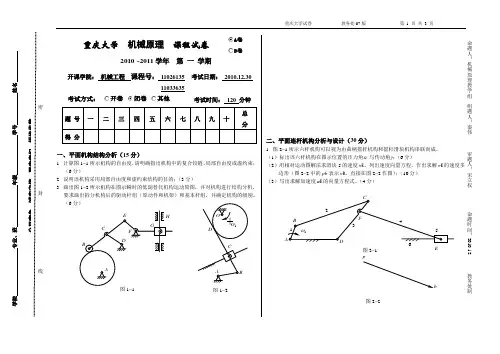
重庆大学 机械原理 课程试卷2010 ~2011学年 第 二 学期开课学院: 机械工程 课程号: 11033635 考试日期: 2011.6.25考试方式: 考试时间: 120 分钟一、平面机构结构分析(15分)1. 试用图1-1所示II 级基本杆组搭接一个自由度为1,且输入运动为单向连续转动,输出运动为往复直线移动的平面六杆机构,画出机构结构示意图,标出原动件;(4分)2. 图1-2所示机构中,凸轮为一偏心圆,圆心在O 点。
(1)计算该机构的自由度,明确指出机构中的复合铰链、局部自由度或虚约束;(5分) (2)画出该机构在图示瞬时的低副替代机构示意图,取凸轮为原动件,对机构进行结构分析。
要求画出拆分机构后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(6分)二、平面连杆机构分析与设计(25分)1. 图2-1为一平行四边形机构的机构运动简图。
曲柄1的角速度为ω1,角加速度为α1,方向如图所示。
(1)标出该机构在图示位置的压力角α;(2分)(2)用相对运动图解法求点C 的速度v C ,构件2、3的角速度ω2、ω3(要求列出速度向量方程,作出速度多边形,建议以pb =30mm 表示v B ,所有作图线要清晰);(6分)(3)用相对运动图解法求点C 的加速度a C ,构件2、3的角加速度α2、α3(要求列出加速度向量方程,作出加速度多边形,建议以p 'n 'B =30mm 表示nB a , n 'B b '=30mm 表示tB a ,所有作图线要清晰)。
(6分)命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2011.06教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密图1-1图2-1G图1-22. 设计一个全铰链六杆机构,其结构为前置曲柄摇杆机构后接一个RRR 型II 级组。
曲柄摇杆机构行程速比系数K =1.4,摇杆CD 的两极限位置分别为C 1D 及C 2D ,摆角ϕ=60︒,其对应输出构件EF 的两条标线位置分别为FG 1和FG 2,摆角ψ=30︒。
2012-2013学年第二学期机械制造及自动化专业机械原理课程期末试卷(答案)专业__机械_设计________班级11机械卓越___________姓名___朱启_______学号___________一、是非题(用“Y”表示正确,“N”表示错误填在题末的括号中)。
(本大题共10小题,每小题1分,总计10分)1.机构具有确定相对运动的条件为:其的自由度F 0。
( n ) 2.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。
( y ) 3.在摆动导杆机构中,若取曲柄为原动件时,机构的最小传动角γmin=0º;而取导杆为原动件时,则机构的最小传动角γmin=90º。
( n ) 4.机构当出现死点时,对运动传递是不利的,因此应设法避免;而在夹具设计时,却需要利用机构的死点性质。
( y ) 5.当其它条件不变时,凸轮的基圆半径越大,则凸轮机构的压力角就越小,机构传力效果越好。
( y ) 6.在蜗杆传动中,蜗杆的升角等于蜗轮的螺旋角,且蜗杆与蜗轮的螺旋线旋向相同。
( y ) 7.渐开线直齿圆锥齿轮的标准参数取在大端上。
( y ) 8.为了减小飞轮的尺寸,在机器的低速轴上安装飞轮后,可以较好地降低机器的速度波动。
( n ) 9.机器等效动力学模型中的等效质量(或转动惯量)是一个假想质量(或转动惯量),它不是原机器中各运动构件的质量(或转动惯量)之和,而是根据动能相等的原则转化后计算得出的。
( y ) 10.不论刚性回转体上有多少个不平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
( y ) 二、填空题(将正确的答案填在题中横线上方空格处)。
1、机构具有确定运动的条件是:,若机构自由度F>0,而原动件数<F,则构件间的运动是,若机构自由度F>0,而原动件数>F,则各构件之间。
2、瞬心是两个作平面相对运动刚体上瞬时为零的。
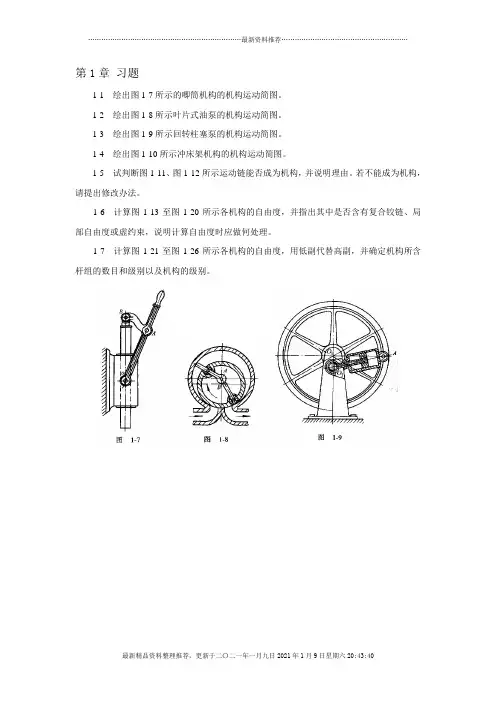
第1章习题1-1 绘出图1-7所示的唧筒机构的机构运动简图。
1-2 绘出图1-8所示叶片式油泵的机构运动简图。
1-3 绘出图1-9所示回转柱塞泵的机构运动简图。
1-4 绘出图1-10所示冲床架机构的机构运动简图。
1-5 试判断图1-11、图1-12所示运动链能否成为机构,并说明理由。
若不能成为机构,请提出修改办法。
1-6 计算图1-13至图1-20所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度时应做何处理。
1-7 计算图1-21至图1-26所示各机构的自由度,用低副代替高副,并确定机构所含杆组的数目和级别以及机构的级别。
第1章综合测试题1-1 填空题及简答题(1)平面机构中若引入一个高副将带入个约束,而引入一个低副将带入人约束。
(2)高副低代必须满足的条件是,。
(3)何谓运动链?运动链具备什么条件才具有运动的可能性?具备什么条件才具有运动的确定性?运动链具备什么条件才能成为机构?(4)何谓机构运动简图?绘制的步骤如何?(5)机构具有确定运动的条件是什么?(6)在计算平面机构自由度时应注意哪些事项?(7)杆给具有什么特点?如何确定杆组的级别?(8)如果确定机构的级别?选择不同原动件对机构的级别有无影响?1-2 画出图1-27所示油泵的机构运动简图,并计算其自由度。
1-3 判别图1-28、图1-29所示运动链能否成为机构,并说明理由。
如果有复合铰链、局部自由度或虚约束,需一一指出。
1-4 试用低副代替图1-30所示机构中的高副,并说明高副低代的一般方法。
1-5 图1-31所示为一机构的初拟设计方案,试从机构自由度的概念分析其设计是否会理,并提出修改措施。
又问,在此初似设计方案中,是否存在复合铰链、局部自由度和虚约束?1-6 计算图1-32所示机构的自由度,并在高副低代后,确定机构所含杆组的数目和级别并判断机构的级别。
第1章习题参考答案1-5 F=0,机构不能运动F=0,机构不能运动1-6 F=1F=1F=1F=2F=1F=1F=1F=11-7 F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅲ级机构,一个Ⅱ级杆组,一个Ⅱ级杆组F=1,Ⅱ级机构F=1,Ⅲ级机构第1章综合测试题参考答案1-2 F=11-3 F=0,不能成为机构;F=1,能成为机构,F(G)为虚约束1-5 E为虚约束,B为局部自由度1-6 F=1,一个Ⅲ级杆组,一个Ⅰ级杆组,Ⅲ级机构。
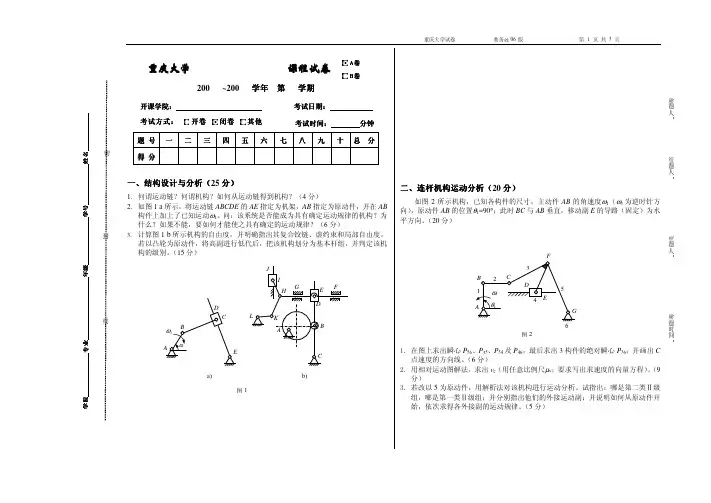
重庆大学 机械原理 课程试卷A卷B卷2010 ~2011学年 第 一 学期开课学院: 机械工程 课程号: 11026135 11033635考试日期: 2010.12.30考试方式:开卷闭卷 其他 考试时间: 120 分钟一、平面机构结构分析(15分)1. 计算图1-1所示机构的自由度,请明确指出机构中的复合铰链、局部自由度或虚约束;(6分)2. 说明该机构采用局部自由度和虚约束结构的目的;(3分)3. 画出图1-2所示机构在图示瞬时的低副替代机构运动简图,并对机构进行结构分析,要求画出拆分机构后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(6分)二、平面连杆机构分析与设计(30分)1. 图2-1所示六杆机构可以视为由曲柄摇杆机构和摇杆滑块机构串联而成。
(1)标出该六杆机构在图示位置的压力角α 与传动角γ;(6分)(2)用相对运动图解法求滑块5的速度v E ,列出速度向量方程,作出求解v E 的速度多边形(图2-2中的pb 表示v B ,直接在图2-2作图);(10分) (3)写出求解加速度a E 的向量方程式。
(4分)命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2010.12教务处制学院专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密E图2-1 p b图2-2图1-2图1-12. 设计一个六杆机构,其结构如图2-1所示,前置曲柄摇杆机构行程速比系数K=1.4,摇杆CD的两极限位置分别为C1D及C2D,摆角ϕ=60︒,其对应滑块的两位置分别为E1及E2,机架水平布置,C1D与机架垂直,回转副F的中心在CD连线上。
设图2-3已按比例绘制出C1D、C2D以及E1、E2,用图解法在图2-3上设计,求出曲柄长度l AB、机架长度l AD、连杆长度l BC、l FE以及DF长度L DF(保留作图线)。
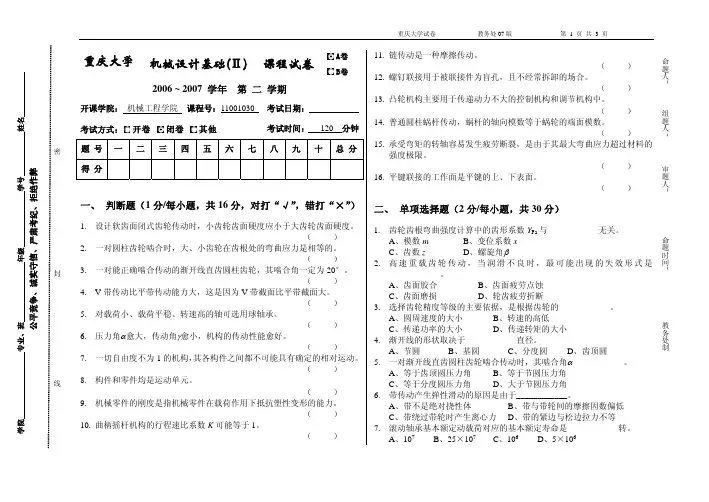
(10分)三、凸轮机构分析(10分)图3-1所示滚子摆动从动件盘形凸轮机构中,凸轮为一偏心圆,顺时针转向,已知参数:R=20 mm,l OA=10 mm,l OB=40 mm,l BC=33 mm,r r=5 mm。
贵州理工学院2019—2020学年第二学期考试试卷(A卷)机械原理注意事项:1. 请学生按要求在答题卡相应位置处填写学院、班级、学号及姓名。
2. 满分100分,考试时间为150分钟,开卷考试。
一、填空题(共10分,每空1分)1.机械原理研究的对象是。
2.从机构结构观点而言,任何机构是由原动件、机架、三部分组成。
3.瞬心是相对运动两构件上瞬时相对速度的重合点。
4.滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的曲线。
5.曲柄摇杆机构中,若曲柄等速转动,极位夹角θ=36°,摇杆工作时间为6秒,试问摇杆空回行程所需时间为秒。
6.假设由计算得到V A=6m/s,在速度图上用长度为pa=60mm的线段来表示,则其速度比例尺μv为m/s/mm。
7.并联机组中,若组成机器的单机效率各不相同,其中最高效率和最低效率分别为ηmax和ηmin,则机组的总效率η满足关系式: 。
8.铰链四杆机构ABCD中,已知AB=35mm,BC=60mm,CD=55mm, AD =85mm,当AD为机架时是机构;当AB为机架时是机构;当BC为机架时是机构。
二、选择题(共20分,每小题2分)1.一个K大于1的铰链四杆机构与K等于1的对心曲柄滑块机构串联组合,该串联组合而成的机构的行程速比系数K ( )。
A.大于1 B.小于1 C.等于1 D.等于2 2.基本周转轮系是由( )构成。
A.行星轮和中心轮 B.行星轮、惰轮和中心轮C.行星轮、行星架和太阳轮 D.行星轮、惰轮和行星架3.与连杆机构相比,凸轮机构最大的缺点是( ) 。
A.惯性力难以平衡 B.点、线接触易磨损C.设计较为复杂 D.不能实现间歇运动4. 一对渐开线标准直齿圆柱齿轮要正确啮合,它们的( )必须相等。
A.直径 B.宽度 C.齿数 D.模数5.若有m个构件以复合铰链相联接时,其构成的转动副数应等于( )。
A.m+1 B. m+2 C. m-1 D. m6. 在曲柄摇杆机构中,若曲柄为主动件,且作等速转动时,其从动件摇杆作( )。
一、是非题(用“Y”表示正确,“N”表示错误填在题末的括号中)。
(本大题共10小题,每小题1分,总计10分)1.机构具有确定相对运动的条件为:其的自由度F 0。
( n )2.构件是机构或机器中独立运动的单元体,也是机械原理研究的对象。
( y ) 3.在摆动导杆机构中,若取曲柄为原动件时,机构的最小传动角γmin=0º;而取导杆为原动件时,则机构的最小传动角γmin=90º。
( n )4.机构当出现死点时,对运动传递是不利的,因此应设法避免;而在夹具设计时,却需要利用机构的死点性质。
( y )5.当其它条件不变时,凸轮的基圆半径越大,则凸轮机构的压力角就越小,机构传力效果越好。
( y )6.在蜗杆传动中,蜗杆的升角等于蜗轮的螺旋角,且蜗杆与蜗轮的螺旋线旋向相同。
( y )7.渐开线直齿圆锥齿轮的标准参数取在大端上。
( y )8.为了减小飞轮的尺寸,在机器的低速轴上安装飞轮后,可以较好地降低机器的速度波动。
( n )9.机器等效动力学模型中的等效质量(或转动惯量)是一个假想质量(或转动惯量),它不是原机器中各运动构件的质量(或转动惯量)之和,而是根据动能相等的原则转化后计算得出的。
( y )10.不论刚性回转体上有多少个不平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
( y )二、填空题(将正确的答案填在题中横线上方空格处)。
(本大题共5小题,每空2分,总计10分)1.速度影像的相似原理只能应用于同一构件上的各点,而不能应用于机构的不同构件上的各点。
2.机械中三角带(即V带)传动比平型带传动用得更为广泛,从摩擦角度来看,其主要原因是:三角带属槽面摩擦性质,当量摩擦系数较平面摩擦系数大,故传力大。
3.用作图法绘制直动从动件盘形凸轮廓线时,常采用反转法。
即假设凸轮静止不动,从动件作作绕凸轮轴线的反向转动(-ω1 方向转动)和沿从动件导路方向的往复移动的复合运动。
《机械原理》试卷参考答案开课单位:机械工程学院,考试形式:闭卷,允许带 计算器、绘图仪器 入场一、是非题(共10分,每小题2分,对者在括号内打“√”,错者打“×”1、(× ) 当机构的自由度数小于机构的原动件数时,机构将具有确定的相对运动。
2、(√ ) 不论刚性转子上有多少个不平衡质量,也不论它们如何分布,只需在任意选定的两个平面内,分别适当地加一平衡质量,即可达到动平衡。
3、(× ) 在其他参数不变的前提下,槽面摩擦较平面摩擦的摩擦力较大,是因为前者摩擦系数较大。
4、(√) 在移动副中,当驱动力作用线在摩擦锥之内,则发生自锁。
5、(√ ) 对于单自由度的机械系统,若选定等效构件为移动件时,其等效质量是按等效前后动能相等的条件进行计算的。
二、填空题(共10分,每空11、飞轮主要用以调节 周期性 速度波动,若不考虑其他因素,只为了减小飞轮尺寸和重量,应将其安装在 高速 轴上。
2、刚性转子的静平衡就是要使 惯性力 之和为零;而刚性转子的动平衡则要使 惯性力 之和及 惯性力偶矩 之和均为零。
3、三个彼此作平面相对运动的构件共有 3 个瞬心,且必位于 同一直线 上。
4、在机构运动分析的速度多边形中,机架的速度影像是 极点 。
速度影像和加速度影像原理只适用 于 同一构件 。
5、当机械的效率0≤η时,机构则发生 自锁 。
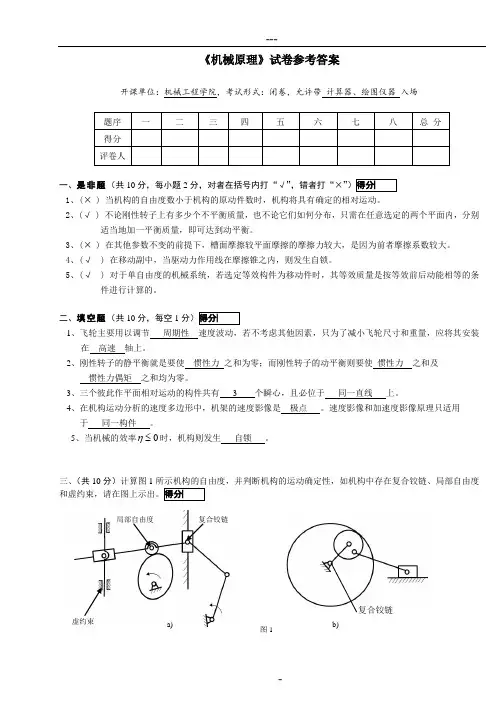
三、(共10分)计算图1所示机构的自由度,并判断机构的运动确定性,如机构中存在复合铰链、局部自由度图1虚约束局部自由度复合铰链复合铰链b)a)四、(共20分)图2所示为铰链四杆机构的机构运动简图,已知连架杆1为主动件,匀速转动,角速度101=ωrad/s ,转向如图示。
各构件长度分别为:AB=30,BC=40,CD=50,AD=60 (单位为:mm),构件AB 的方位角为60o ,ABE 为等边三角形。
试用图解法求解该运动位置: 1)构件1的速度影像;2)找出该瞬时在连杆2和摇杆3上,与连架杆1上E 2和E 3。
第1章习题1-1 绘出图1-7所示的唧筒机构的机构运动简图。
1-2 绘出图1-8所示叶片式油泵的机构运动简图。
1-3 绘出图1-9所示回转柱塞泵的机构运动简图。
1-4 绘出图1-10所示冲床架机构的机构运动简图。
1-5 试判断图1-11、图1-12所示运动链能否成为机构,并说明理由。
若不能成为机构,请提出修改办法。
1-6 计算图1-13至图1-20所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度时应做何处理。
1-7 计算图1-21至图1-26所示各机构的自由度,用低副代替高副,并确定机构所含杆组的数目和级别以及机构的级别。
第1章综合测试题1-1 填空题及简答题(1)平面机构中若引入一个高副将带入个约束,而引入一个低副将带入人约束。
(2)高副低代必须满足的条件是,。
(3)何谓运动链?运动链具备什么条件才具有运动的可能性?具备什么条件才具有运动的确定性?运动链具备什么条件才能成为机构?(4)何谓机构运动简图?绘制的步骤如何?(5)机构具有确定运动的条件是什么?(6)在计算平面机构自由度时应注意哪些事项?(7)杆给具有什么特点?如何确定杆组的级别?(8)如果确定机构的级别?选择不同原动件对机构的级别有无影响?1-2 画出图1-27所示油泵的机构运动简图,并计算其自由度。
1-3 判别图1-28、图1-29所示运动链能否成为机构,并说明理由。
如果有复合铰链、局部自由度或虚约束,需一一指出。
1-4 试用低副代替图1-30所示机构中的高副,并说明高副低代的一般方法。
1-5 图1-31所示为一机构的初拟设计方案,试从机构自由度的概念分析其设计是否会理,并提出修改措施。
又问,在此初似设计方案中,是否存在复合铰链、局部自由度和虚约束?1-6 计算图1-32所示机构的自由度,并在高副低代后,确定机构所含杆组的数目和级别并判断机构的级别。
第1章习题参考答案1-5 F=0,机构不能运动F=0,机构不能运动1-6 F=1F=1F=1F=2F=1F=1F=1F=11-7 F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅲ级机构,一个Ⅱ级杆组,一个Ⅱ级杆组F=1,Ⅱ级机构F=1,Ⅲ级机构第1章综合测试题参考答案1-2 F=11-3 F=0,不能成为机构;F=1,能成为机构,F(G)为虚约束1-5 E为虚约束,B为局部自由度1-6 F=1,一个Ⅲ级杆组,一个Ⅰ级杆组,Ⅲ级机构。
机械原理试题及答案试卷答案一、选择题(每题2分,共20分)1. 下列哪个选项不属于机械的基本组成要素?A. 零件B. 部件C. 机构D. 系统答案:D2. 下列哪种机构属于高副机构?A. 齿轮机构B. 曲柄滑块机构C. 螺旋机构D. 摇杆机构答案:A3. 下列哪个选项不是机械设计的基本要求?A. 实用性B. 安全性C. 经济性D. 艺术性答案:D4. 下列哪种材料不适合用作机械零件?A. 钢B. 铝C. 塑料D. 橡胶答案:D5. 下列哪个选项不是机械传动的基本形式?A. 齿轮传动B. 摩擦传动C. 液压传动D. 磁悬浮传动答案:D二、填空题(每题2分,共20分)6. 机械原理是研究机械的______、______和______等方面的基本理论和方法的科学。
答案:结构、运动、力学7. 机械零件的疲劳破坏是由于______引起的。
答案:交变应力8. 机械零件的强度计算方法主要有______、______和______。
答案:安全系数法、许用应力法、极限载荷法9. 齿轮传动的失效形式主要有______、______和______。
答案:点蚀、齿面磨损、轮齿折断10. 机械系统的平衡条件是______、______和______。
答案:力平衡、力矩平衡、功率平衡三、判断题(每题2分,共20分)11. 零件和部件是机械的基本组成要素。
()答案:√12. 机械设计的基本要求不包括可靠性。
()答案:×13. 机械传动中的摩擦力总是有害的。
()答案:×14. 机械零件的疲劳破坏只与材料性能有关,与应力状态无关。
()答案:×15. 机械系统的平衡条件只包括力平衡和力矩平衡。
()答案:×四、简答题(每题10分,共30分)16. 简述机械原理的主要研究内容。
答案:机械原理的主要研究内容包括:机械的基本组成要素、机械的运动、机械的力学性能、机械零件的强度计算、机械传动、机械系统设计等。
一、是非题,判断下列各题,对的画“√”,错的画“×”(每题2分,共10分) 1、Ⅱ级机构的自由度不能大于2; 2、铰链四杆机构中,若存在曲柄,其曲柄一定是最短杆。
3、当凸轮机构的压力角过大时,机构易出现自锁现象。
4、国产标准斜齿圆柱齿轮的端面齿顶高等于法面齿顶高; 5、棘轮机构和槽轮机构都是间歇运动机构。
二、单项选择题(每小题2分,共10分)1、在铰链四杆机构中,取( )杆作为机架,则可得到双摇杆机构。
A .最短杆;B .最短杆的对边;C .最长杆;D .连杆 2、下列为空间齿轮机构的是( )机构。
A .圆锥齿轮;B .人字齿轮;C .平行轴斜齿圆柱齿轮;D .直齿圆柱齿轮3、表征蜗杆传动的参数和几何尺寸关系的平面应为( )。
A .轴面;B .端面;C .中间平面;D .法面4、在机构中原动件数目( )机构自由度时,该机构具有确定的运动。
A .小于;B .等于;C .大于;D .大于等于5、 作连续往复移动的构件,在行程的两端极限位置处,其运动状态必定是( )。
A .0=v ,0=a ;B .0≠v ,0=a ;C .0=v ,0≠a ;D .0≠v ,0≠a 。
三、填空题(每小题2分,共10分)1、为使凸轮机构结构紧凑,应选择较小的基圆半径,但会导致压力角_______ 。
2、构件是________的单元,而零件是制造的单元。
3、在摆动导杆机构中,导杆摆角 30ψ=,其行程速度变化系数K 的值为_______。
4、在周转轮系中,兼有_______的齿轮称为行星轮。
5、平面定轴轮系传动比的大小等于_______ 。
四、分析简答题(40分)1、(10分)计算图示机构的自由度。
确定机构所含杆组的数目和级别,并判定机构的级别。
机构中的原动件如图所示。
2、(10分)图示铰链四杆机构中,所标数字代表杆长,单位为cm 。
试求: 1)通过计算判断该机构属于铰链四杆机构中的何种类型;2)欲使该机构为曲柄摇杆机构,现调整AB 杆长,试确定出AB 杆长的取值范围。
重庆大学 机械原理 课程试卷2009 ~2010学年 第 二 学期 开课学院: 机械工程 课程号: 11028430 考试日期: 2010.6.5 考试时间: 120 分钟一、平面机构结构分析(15分)1. 在图1-1所示机构中,凸轮为一圆盘,铰链A 、B 、C 共线,AB =BC =BD 。
(1)计算该机构自由度,请明确指出机构中的复合铰链、局部自由度或虚约束;(9分)(2)画出该机构的低副替代机构。
(3分)2. 试画出图1-2所示机构的基本杆组(必须将构件代号标注在基本杆组中),并确定机构的级别。
(3分)二、平面连杆机构分析与设计(30分)1. 确定图2-1所示机构在图示位置的全部瞬心。
若曲柄1的角速度ω1已知,写出计算构件3的角速度ω3的表达式;(8分)2. 画出机构在图示位置的传动角γ;(2分)命题人:机械原理教学组 组题人:秦伟审题人:秦伟命题时间:2010.5教务处制学院专业、班 年级 学号姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密图1-2图2-1图1-13. 在图2-2所示机构中,已知=45°,=10rad/s ,逆时针方向,l AB =400mm ,=60°,试用相对运动图解法求构件2的角速度、构件3的速度v 3和加速度a 3(要求列出矢量方程,画出速度多边形和加速度多边形);(10分)4.给定摇杆长度及两极限位置如图2-3所示,图中,μl =0.002m/mm ,要求机构的行程速比系数K =1.5,机架长度l AD =45mm ,试设计曲柄摇杆机构(直接在图2-3上作图,保留作图线,求出l AB 和l BC 的值)。
(10分)三、凸轮机构分析(10分)1. 试在图3中画出凸轮的理论轮廓曲线、基圆、从动件的最大行程h 、凸轮逆时针转至轮廓线上点A (点A 位于凸轮轮廓线的直线段上)与滚子接触时,从动件位移s 和机构压力角α;(6分)2. 凸轮的推程角Φ =?、回程角Φ'=?(4分)四、齿轮机构参数计算(10分)在图4所示齿轮机构中,己知各直齿圆柱齿轮模数均为2mm ,各轮的齿数分别为:z 1=15,z 2=32,z 2'=20,z 3=30。