第三章 分析力学基础 (理论力学Ⅱ)
- 格式:ppt
- 大小:1.87 MB
- 文档页数:60
![[物理]分析力学基础](https://uimg.taocdn.com/cff17a52f46527d3240ce040.webp)


参考答案 第一章一、1、① 2、③ 3、④ 4、②二、1、 90° 2、等值、反向、共线 3、120°;0 4、略。
第二章一、1、④ 2、② 3、① 4、②、② 5、②、④ 6、①、②7、② 9、② 10、① 11、③、① 12、② 二、1、2P ,向上 2、2P,向上 3、0°,90°4、可以,AB 两点不与汇交点O 共线5、通过B 点的一合力,简化为一力偶6、10 kN ,向左7、L m 3/348、α2cos 1m第三章一、1、② 2、③ 3、③ 4、④ 5、② 二、1、P ,-P ,P ,0,0,0 2、0,am2 3、二矩心连线不垂直投影轴4、0,-P5、为一合力,为一力偶,平衡 三、110=kN 3NB F 110=kN,=100kN,=03Ax Ay A F F M 四、=2Dx F KN ;=0Dy F KN ;=2Fx F KN ;=0Fy F KN 五、N F AX 350=,N F AY 100=,N F DX 850=,N F DY 900= 六、a M F C /=,a M F AX /=,0=AY F ,M M A -=第四章一、1、④ 2、② 3、④ 4、③ 5、④ 二、1、'=R F P ,=-ai+bj A M P P 2、F c b a ba 222++-3、①力偶矩的大小;②力偶作用面的方位;③力偶的转向。
4、力偶5、2,3;1,3;2,3;3,6。
三、主矢:250='RF ,主矢方向:21cos 0cos 21cos ===γβα主矩 MB=2.5Nm ,主矩方向:0cos 0cos 1cos ===γβα四、kN F F kN F O z O y O x 6015===,,;m kN M m kN M m kN M O z O y O x ⋅-=⋅=⋅=502458,,第五章一、1、② 2、①,①,① 3、① 4、③ 5、③ 二、1、2φm 2、F=0,m =3N·cm 3、F =15KN 4、F=P,M=PR 5、翻倒,T=0.6839P 三、θφan /12an t t += 四、系统处于静止状态。
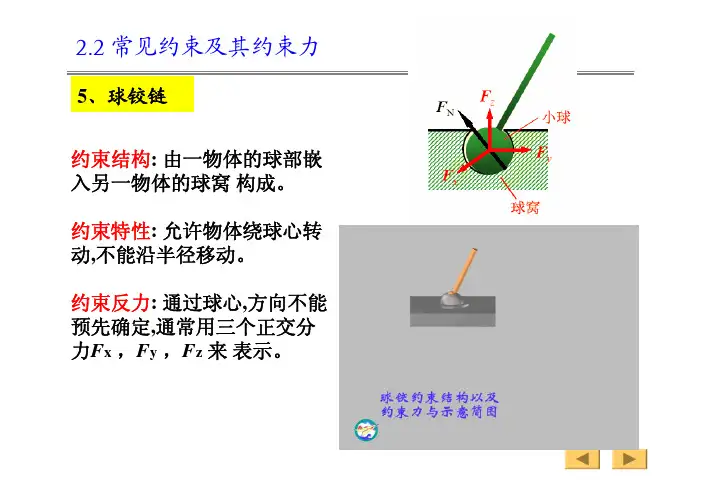
5、球铰链
约束结构: 由一物体的球部嵌入另一物体的球窝构成。
约束特性: 允许物体绕球心转动,不能沿半径移动。
约束反力: 通过球心,方向不能预先确定,通常用三个正交分力F x,F y,F z来表示。
人造髋关节
二力杆工程实例
固定端约束除了加约束力,还要加上约束力偶。
运动学角度:固定端既限制线位移,又限制角位移,如果只有约束力,则构件将转动。
必须有约束力偶才行。
力系简化角度:固定端所受的力是一个复杂的平面任意力系,力系向端部某点简化的结果是一力和一力偶。
CD是不是二力
杆?
2.3 受力分析与受力图
刚化原理:若变形体在某一力系作用下处于平衡,则将此变形体刚化为刚体,其平衡状态保持不变。
只有刚化原理没有软化原理。
1. 右拱BC 的受力图。
C
B
解:
F C
F B
2. 左拱AC 的受力图。
A C
F
F Ax C F
F Ay。
2009年12月29日第一章分析力学基础第一章分析力学基础经典力学本章内容:§1–5 拉格朗日方程的初积分§1–6 第一类拉格朗日方程以广义坐标表示的质点系平衡条件一、以广义坐标表示的虚功方程虚功方程广义坐标ii++i zi i yi iF F的广义力广义虚位移δq k ++izi i yi i F F即:二、广义力的计算δq≠0kz z z δqk≠0[例1-1] 求广义力A BC M x ϕoδx δr C m 1gm 2g解:0δ,0δ=≠ϕx (1)求Q xδθA BC M x ϕom 1gm 2gδϕδr C(2)求Q ϕϕδ,0δ=≠ϕx (1)求Q x0δ,0δ≠=ϕx三、有势力的广义力元功元功元功推广:y x dd−−广义坐标当质点系所受的主动力都是有势力时,有广义力++i zi i yi iF F当质点系所受的主动力都是有势力时,有广义力++i zi i yi iF F四、势能驻值定理变分虚位移原理主动力i i i即:有势力驻值五、最小势能原理稳定性稳定五、最小势能原理稳定性随遇平衡结论:稳定最小势能原理¾¾z达朗贝尔原理z虚位移原理达朗贝尔原理虚位移原理即:动力与惯性力在该系统的任意虚位移上的虚功之和为零。
动力学普遍方程解析形式即:动力学普遍方程[例1-2]已知:解:求:C 2C 1θAC Bza 1a ea rαF I1F I2eF I2r M I2αR a =rC 2C 1θA CBF I1F I2e F I2r M I2m 1g m 2g zδ,0δ≠=ϕx x ϕδx ¾δr C2δϕC 2C 1θA CBF I1F I2eF I2r M I2δx δϕm 1gm 2gcos (1−a θ0δ,0δ=≠ϕx ¾=δx121121cos (1−a θ本章内容:§1–5 拉格朗日方程的初积分§1–6 第一类拉格朗日方程上次内容回顾:广义力:广义坐标广义坐标注意动力学普遍方程广义坐标下面对第二项用广义坐标iiii广义惯性力动力学普遍方程广义惯性力广义惯性力:i i&=i i =)(在完整约束下,第t i∂∂+r k ki q q &∂∂r 广义速度i &r ii i =)(i i(i i (ii(i ii ii(i i广义惯性力⋅(i i r &⋅i i i i ⋅(i (ii ⋅r &(i=)(i i &&⋅r i &i ⋅i i (kii ⋅r &(k i i i &∂=⋅i i i ⋅i i (i &i (i im &∑i i m((i i m &∑i i m (第二类拉格朗日方程z有势力第二类拉格朗日方程−)((−)拉格朗日函数(−)保守系统z自由度广义坐标思考:(广义力。