simulink仿真环境
- 格式:ppt
- 大小:2.29 MB
- 文档页数:93

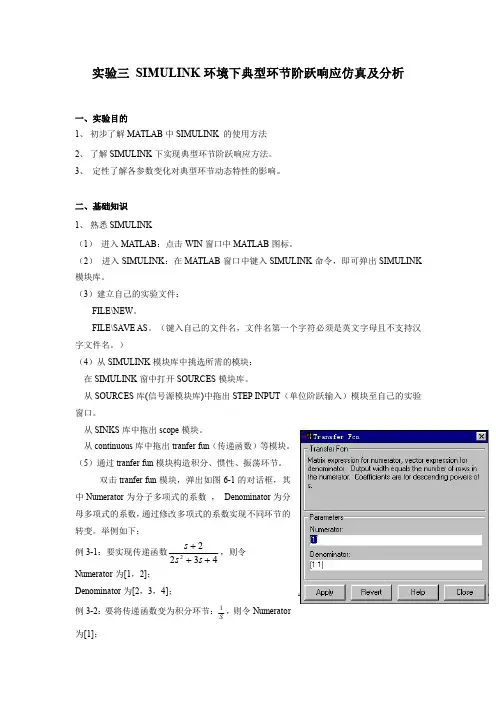
实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
③如图A4 所示,用信号线连接模块。
(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
学习使用MATLABSimulink进行系统仿真【第一章:引言】在如今数字化时代,仿真已成为系统设计与优化的重要工具。
系统仿真能够帮助工程师在产品开发的早期阶段快速验证设计,预测产品性能,并提供有关系统行为的深入洞察。
由于其易用性和广泛应用领域,MATLABSimulink成为了工程界最受欢迎的仿真工具之一。
本文将介绍如何学习使用MATLABSimulink进行系统仿真,并强调其专业性。
【第二章:MATLABSimulink概览】MATLABSimulink是一个具有图形化界面的仿真环境,可用于建模、仿真和分析各种复杂动态系统。
它使用块状图形表示系统的组成部分,并通过连接输入和输出端口模拟系统的行为。
用户可以通过简单拖拽和连接块状元件来构建仿真模型,并通过调整参数和设置仿真参数来进行模拟分析。
【第三章:基本建模技巧】在使用MATLABSimulink进行系统仿真之前,掌握基本的建模技巧至关重要。
首先,需要熟悉各种块状元件的功能和用途,例如传感器、执行器、逻辑运算器等。
其次,理解信号流和数据流的概念,以及如何在模型中正确地引导信号传递和数据流动。
最后,学习使用条件语句、循环语句等控制结构来实现特定的仿真逻辑。
【第四章:系统模型的构建】在使用MATLABSimulink进行系统仿真时,首先需要根据实际系统的需求和特点进行系统模型的构建。
这包括确定系统的输入和输出,以及分析系统的功能和性能要求。
然后,使用块状元件将系统的各个组成部分建模,并建立各个组件之间的联系和依赖关系。
在构建模型的过程中,要注意选择恰当的块状元件和参数设置,以确保模型的合理性和可靠性。
【第五章:仿真参数设置与分析】为了获得准确且可靠的仿真结果,需要合理设置仿真参数。
常见的仿真参数包括仿真时间、步长和求解器类型等。
仿真时间应根据系统的实际运行时间确定,步长要足够小以保证仿真的精度,而求解器类型则根据系统的特点选择。
完成仿真后,还需要对仿真结果进行分析,以评估系统的性能和进行优化调整。
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
第八第八章章 SIMULINK SIMULINK 交互式仿真集成环境交互式仿真集成环境8.1 引导SIMULINK 是一个进行动态系统建模、仿真和综合分析的集成软件包。
它可以处理的系统包括:线性、非线性系统;离散、连续及混合系统;单任务、多任务离散事件系统。
在SIMULINK 提供的图形用户界面GUI 上,只要进行鼠标的简单拖拉操作就可构造出复杂的仿真模型。
它外表以方块图形式呈现,且采用分层结构。
从建模角度讲,这既适于自上而下(Top-down )的设计流程(概念、功能、系统、子系统、直至器件),又适于自下而上(Bottum-up ) 逆程设计。
从分析研究角度讲,这种SIMULINK 模型不仅能让用户知道具体环节的动态细节,而且能让用户清晰地了解各器件、各子系统、各系统间的信息交换,掌握各部分之间的交互影响。
在SIMULINK 环境中,用户将摆脱理论演绎时需做理想化假设的无奈,观察到现实世界中摩擦、风阻、齿隙、饱和、死区等非线性因素和各种随机因素对系统行为的影响。
在SIMULINK 环境中,用户可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。
由于SIMULINK 环境使用户摆脱了深奥数学推演的压力和烦琐编程的困扰,因此用户在此环境中会产生浓厚的探索兴趣,引发活跃的思维,感悟出新的真谛。
在MATLAB6.x 版中,可直接在SIMULINK 环境中运作的工具包很多,已覆盖通信、控制、信号处理、DSP 、电力系统等诸多领域,所涉内容专业性极强。
本书无意论述涉及工具包的专业内容,而只是集中阐述:SIMULINK 的基本使用技法和相关的数值考虑。
节8.1虽是专为SIMULINK 初学者写的,但即便是熟悉SIMULINK 以前版本的读者也值得快速浏览这部分内容,因为新版的界面、菜单、工具条、模块库都有较大的变化。
第8.2节比较详细地阐述建模的基本操作:通用模块的具体化设置、信号线勾画、标识、模型窗参数设置。
Simulink概述什么是SimulinkSimulink是一种图形化建模和仿真环境,用于多学科设计、建模、仿真和分析动态系统。
它是MATLAB的一个重要组成部分,适用于各种工程领域,如控制系统、通信系统、信号处理、图像处理等。
Simulink通过图形界面和可拖放的模块来建立和调整系统模型,具有直观、易用的特点。
Simulink的基本概念在使用Simulink建模系统之前,我们需要了解一些基本概念。
模块(Blocks)模块是Simulink中的基本构建单元,用于表示系统的各个组成部分。
模块可以是输入、输出、数学运算、逻辑运算、信号处理等等。
模块通过连接线连接在一起,形成系统模型。
系统模型(Model)系统模型是由各种模块构成的系统表示。
通过将各个模块连接在一起,形成一个完整的系统模型,可以用于对系统进行建模、仿真和分析。
信号流(Signal Flow)信号流表示模块之间的数据传递过程。
在Simulink中,信号可以是具有实时连续变化的模拟信号,也可以是离散的采样信号。
信号通过连接线在模块之间传递。
仿真和分析Simulink提供了强大的仿真和分析功能,可以用于验证和优化系统模型。
通过设置仿真参数和初始条件,可以对系统进行仿真,并获取系统在不同时间点的响应和输出。
此外,Simulink还提供了各种分析工具,如频域分析、时域分析、优化等,用于进一步分析和优化系统性能。
Simulink的优点和应用领域Simulink具有许多优点,使得它在工程领域得以广泛应用。
直观易用的建模环境Simulink提供了直观易用的图形界面,使得系统建模变得简单。
通过拖放模块和连接线,用户可以快速建立复杂的系统模型,而无需编写复杂的代码。
多学科设计支持Simulink支持多学科设计,可以在一个环境中集成不同学科的设计要求。
例如,可以将控制系统设计和信号处理设计集成到同一个Simulink模型中,以进行联合仿真和优化。
快速原型开发和验证Simulink的模块化特性使得系统开发变得更加快速和高效。
1. 联合仿真环境设置:软件环境:AMESimR10VC++6.0MA TLAB/Simulink2010a1.将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是. \Microsoft Visual Studio\VC98\Bin中)拷贝至AMESim目录下。
2.环境变量确认:1) 选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;2) 在弹出的“环境变量”窗口中找到系统变量“AME”,它的值就是你所安装AMESim的路径,选中改环境变量;比如AMESim10安装目录(即AMESim10安装文件的存储目录)是:C:\AMESim\v1000(D:\AMESim就是错误的),那么“AME”的值就是C:\AMESim\v1000, 点击“确认”按键,该变量就会加到系统中;3) 按上述步骤设置系统变量“MATLAB”,该值为MA TLAB文件所安装的路径,例如Matlab 2010a按照文件的存储路径为:D:\Program Files\MATLAB\R2011a,那么“MA TLAB”的值就是D:\Program Files\MATLAB\R2010a,点击“确认”按键,该变量就会加到系统中;4) 同样的方式定义系统变量LM_LICENSE_FILE,值为C:\AMESim\v1000\licensing\license.dat,值就是AMESim软件许可文件的存储路径。
即LM_LICENSE_FILE=C:\AMESim\v1000\licensing\license.dat。
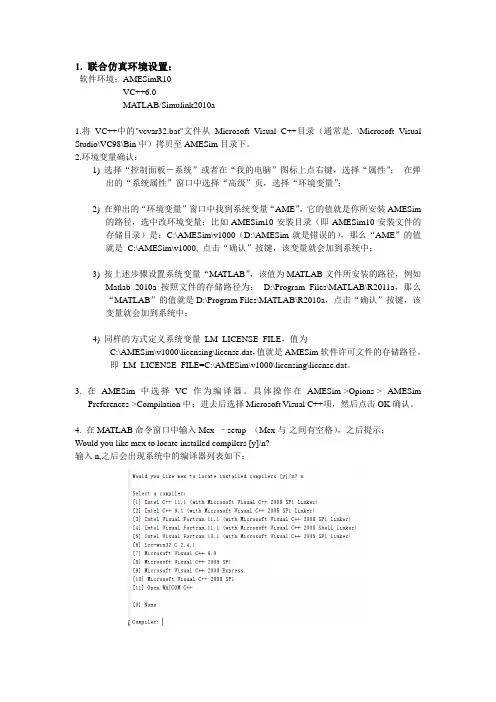
3. 在AMESim中选择VC作为编译器。
具体操作在AMESim->Opions-> AMESimPreferences->Compilation中;进去后选择Microsoft Visual C++项,然后点击OK确认。
simulink 仿真原理Simulink是一种用于建立、仿真和分析动态系统的工具,它基于块图的图形化建模和仿真环境。
Simulink中的模型由各种块组成,每个块代表系统中的一个组件或子系统。
通过连接块之间的信号流,可以建立系统的完整模型。
在Simulink中,系统的行为可以用已知的数学和物理原理描述。
通过在块间定义输入和输出之间的关系,可以建立数值模型。
仿真过程可以提供系统的响应和行为,并用于验证模型的正确性。
Simulink提供了多种模型库,包括数学操作、信号处理、控制系统、电力系统等领域。
用户可以根据需要选择适当的块来构建他们的模型。
此外,Simulink还提供了丰富的仿真参数和分析工具,使用户可以对系统进行深入的研究和优化。
使用Simulink进行仿真的过程通常包括以下步骤:1. 建立模型:选择适当的块,并将它们连接在一起,以形成系统模型。
2. 定义输入信号:指定模型的输入信号,可以是常数、波形或来自外部数据源。
3. 配置模型参数:设置块和模型的参数,例如采样时间、模拟时间、仿真器选项等。
4. 运行仿真:开始仿真过程,并观察系统的响应和行为。
5. 分析和优化:使用Simulink提供的工具进行结果分析和系统优化。
6. 生成代码:将模型生成可嵌入系统或实时硬件的代码。
7. 验证和验证:使用实际数据对生成的代码进行验证,并验证系统的正确性。
Simulink的应用广泛,可以用于开发控制系统、信号处理算法、通信系统等各种领域。
通过图形化建模和仿真环境,Simulink大大简化了系统开发和测试的过程,提高了开发效率和质量。
同时,Simulink也与MATLAB密切集成,可以轻松地进行数据分析和可视化。
SIMULINK的模块介绍1.信号生成模块:这些模块可用于生成不同类型的信号,包括正弦波、脉冲信号、阶跃信号、随机信号等。
通过这些模块,用户可以快速生成自定义的输入信号,用于系统仿真。
2.信号处理模块:这些模块提供了一系列用于信号处理的工具和算法。
例如,滤波器模块可以用于通过滤波器来处理输入信号;傅里叶变换模块可以用于对信号进行频域分析等。
3.系统建模模块:这些模块用于构建系统的数学模型。
用户可以使用这些模块来定义系统的输入、输出、状态等变量,并构建模型方程。
常见的模型包括微分方程模型、状态空间模型等。
4.控制系统设计模块:这些模块用于设计和分析控制系统。
用户可以使用这些模块来设计PID控制器、状态反馈控制器、模糊控制器等,并通过系统的仿真结果来评估和比较不同的控制策略。
5.仿真环境:SIMULINK提供了一个交互式的仿真环境,用户可以在仿真环境中对系统模型进行仿真,观察系统的动态行为。
同时,还可以对系统参数进行调整,以优化系统性能。
6.数据可视化模块:这些模块用于将仿真结果以图形化的形式显示出来。
用户可以使用这些模块绘制系统的输入、输出、状态等变量的曲线图,并对仿真结果进行分析和比较。
7.代码生成模块:SIMULINK还提供了代码生成工具,用户可以将系统模型转换为C语言或其他语言的代码,并在硬件平台上运行。
这使得SIMULINK成为嵌入式系统开发中的重要工具。
总之,SIMULINK提供了一个功能强大的模块化仿真环境,用户可以利用这些模块构建复杂系统的模型,并进行仿真、分析和设计。
通过SIMULINK,用户可以更加直观地理解系统的行为,优化系统的性能,并加速系统开发过程。
它在控制系统设计、信号处理、通信系统设计等领域有着广泛的应用。
simulink仿真原理Simulink仿真原理Simulink是一种基于模块化的多域仿真环境,它使用图形化界面和模块化建模方法,可以对各种系统进行仿真和建模。
Simulink的仿真原理是通过将系统建模为一个或多个模块,并通过连接这些模块来描述系统的行为和交互。
Simulink仿真原理的基础是信号流图。
在信号流图中,模块代表系统的组成部分,信号则代表模块之间的相互作用。
通过连接模块和传递信号,可以模拟系统的运行过程,并观察系统的行为和性能。
Simulink中的模块被称为块,每个块代表一个特定的功能或算法。
这些块可以是基本的数学运算、逻辑运算,也可以是复杂的控制算法或物理模型。
通过选择合适的块,并将它们连接在一起,可以构建出完整的系统模型。
Simulink中的信号可以是连续的,也可以是离散的。
连续信号可以表示系统的物理量,如电压、速度等;离散信号则表示系统的状态或事件,如开关状态、传感器触发等。
通过将连续信号和离散信号连接在一起,可以模拟出系统的实时行为。
Simulink仿真原理的关键之一是求解器。
求解器是Simulink用于计算模型输出的数值方法。
Simulink提供了多种求解器,可以根据系统的特点和仿真需求选择合适的求解器。
常用的求解器有Euler法、隐式法、变步长法等。
通过选择合适的求解器,可以保证系统模型的精度和稳定性。
Simulink仿真原理的另一个关键是仿真参数。
仿真参数是指控制仿真过程的各种设置,如仿真时间、步长、停止条件等。
通过调整这些参数,可以控制仿真的速度和精度,并满足不同仿真需求。
Simulink仿真原理的优势在于其图形化建模和直观的界面。
相比于传统的编程方法,Simulink可以更快速地建立系统模型,并对模型进行可视化调试和验证。
Simulink还支持多领域仿真,可以对多种物理系统、控制系统、通信系统等进行建模和仿真。
Simulink仿真原理是通过图形化建模和模块化设计,通过连接模块和传递信号来描述系统的行为和交互。
simulink 的用法
Simulink是一种图形化建模和仿真环境,用于设计、建模和仿真动态系统。
它是MATLAB软件的一部分,提供了一种直观的方法来构建和模拟各种系统,包括控制系统、通信系统、图像处理系统等。
Simulink的用法包括以下几个步骤:
1.打开Simulink:使用MATLAB软件打开Simulink工具包,或者直接在MATLAB命令窗口中输入"simulink"打开。
2.创建模型:在Simulink界面上使用不同的模块和线段,构建系统模型。
模块可以代表各种组件,如传感器、控制器、执行器等,线段则表示信号和数据流。
3.连接模块:使用适当的线段连接不同的模块,建立模型中各个组件之间的数据流和控制逻辑。
4.参数设置:对模型中的各个模块进行参数设置,以确保其行为与实际系统相符。
5.仿真运行:运行模型进行仿真,观察系统的动态行为和输出结果。
可以通过修改模型参数、调整模型结构来进一步优化和改进系统设计。
除了以上基本用法,Simulink还提供了许多高级功能,如模型验证、优化设计、代码生成等。
模型验证功能可以检测和解决模型中的错误和问题。
优化设计功能可以通过自动搜索和调整模型参数,实现系统性能的最优化。
代码生成功能可以将Simulink模型转换为C代码或其他可执行文件,以便在嵌入式系统中进行实时部署。
总的来说,Simulink提供了一种直观的图形化建模方法,将系统设计过程可视化,使得系统建模和仿真更加简单和高效。