Simulink汽车仿真实例
- 格式:ppt
- 大小:1.17 MB
- 文档页数:10
matlab simulink案例1. 电机传动系统模拟在这个案例中,我们将使用Simulink来模拟一个简单的电机传动系统。
我们将建立一个由电机、负载和控制器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整输入信号和控制器参数,我们可以观察系统的响应,并优化控制器的性能。
2. PID控制器设计在这个案例中,我们将使用Simulink来设计一个PID控制器,并将其应用于一个简单的控制系统。
我们将建立一个由传感器、控制器和执行器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整PID控制器的参数,我们可以观察系统的响应,并优化控制器的性能。
3. 机器人路径规划在这个案例中,我们将使用Simulink来进行机器人的路径规划。
我们将建立一个由传感器、路径规划器和执行器组成的系统,并使用Simulink来模拟机器人在不同环境中的路径规划行为。
通过调整路径规划器的算法和参数,我们可以优化机器人的路径规划性能。
4. 电力系统稳定性分析在这个案例中,我们将使用Simulink来进行电力系统的稳定性分析。
我们将建立一个由发电机、负载和传输线路组成的电力系统,并使用Simulink来模拟系统的动态行为。
通过调整系统的参数和控制策略,我们可以评估系统的稳定性,并优化系统的运行性能。
5. 汽车动力学模拟在这个案例中,我们将使用Simulink来进行汽车的动力学模拟。
我们将建立一个由车辆、发动机和传动系统组成的模型,并使用Simulink来模拟车辆在不同驾驶条件下的动力学行为。
通过调整车辆参数和控制策略,我们可以评估车辆的性能,并优化驾驶体验。
6. 无人机飞行控制在这个案例中,我们将使用Simulink来进行无人机的飞行控制。
我们将建立一个由无人机、传感器和控制器组成的系统,并使用Simulink来模拟无人机在不同飞行任务下的控制行为。
通过调整控制器的参数和飞行任务的要求,我们可以优化无人机的飞行性能。
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模一、本文概述随着电动汽车技术的快速发展,分布式驱动电动汽车(Distributed Drive Electric Vehicles, DDEV)因其高效能源利用、优越操控性能以及灵活的驱动方式,正逐渐成为新能源汽车领域的研究热点。
为了更深入地理解和研究DDEV的动态特性与控制策略,建立精确的车辆模型是关键。
本文旨在探讨基于Carsim与Simulink 联合仿真的分布式驱动电动汽车建模方法,以期在车辆动力学建模、控制策略优化和系统集成等方面提供有效的技术支撑。
本文首先介绍分布式驱动电动汽车的基本结构和特点,阐述其相较于传统车辆的优势。
随后,详细介绍Carsim和Simulink两款软件在车辆建模和仿真分析方面的功能和特点,以及它们联合仿真的优势。
接着,将重点介绍如何利用Carsim建立DDEV的车辆动力学模型,包括车辆动力学方程、轮胎模型、驱动系统模型等。
将探讨如何利用Simulink构建DDEV的控制策略模型,包括驱动控制、制动控制、稳定性控制等。
在建立了DDEV的车辆动力学模型和控制策略模型后,本文将详细阐述如何将这两个模型进行联合仿真,并分析仿真结果。
通过对比分析不同控制策略下的车辆性能表现,验证所建模型的准确性和有效性。
本文还将讨论分布式驱动电动汽车建模面临的挑战和未来的研究方向,为相关领域的研究者提供参考和借鉴。
二、Carsim软件介绍Carsim是一款由密歇根大学开发的高级车辆动力学仿真软件,广泛应用于车辆控制、车辆动力学、主动和被动安全、电动和混合动力车辆以及先进的驾驶员辅助系统等领域的研究和开发。
该软件以模块化的方式集成了车辆各个子系统的动力学模型,包括发动机、传动系统、制动系统、转向系统、悬挂系统、轮胎以及车身等。
Carsim的核心优势在于其强大的物理引擎和精确的仿真能力。
通过精确的算法和详尽的车辆参数数据库,Carsim能够模拟出车辆在各种道路条件和驾驶操作下的动态行为,如加速、制动、转向、侧滑等。

simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
基于MATLAB/Simulink的汽车平顺性的仿真模型摘要本文在分析平顺性的研究意义和研究内容的基础上,以数学仿真原理为理论基础,建立了以某经济型轿车为原型的整车八自由度汽车模型拉格朗日方程,并应用仿真软件MATLAB/Simulink建立了汽车平顺性的仿真模型。
按照国家标准模拟了不同车速下的汽车试验,得出了平顺性仿真在不同车速下时间域和频率域的仿真结果。
本文还参考了实车的平顺性试验,该试验参照国标GB/T4970?1996执行。
在国家B级路面上以不同车速对驾驶员座椅、副驾驶员座椅和后排左侧座椅的垂直加速度信号进行了测量,得出了平顺性试验在时间域和频率域的结果。
在汽车平顺性仿真与试验的基础上,文中对处理后的数据结果进行了比较分析,对试验所用汽车的平顺性作出了评价,给出了仿真与试验的相应结论。
关键词:平顺性,八自由度建模,路谱,MATLAB/SimulinkAbstractThis paper analyzes the significance of ride comfort and contents of research based on the principle of mathematical simulation based on the theory established by an economy car for the prototype vehicle eight degrees of freedom vehicle model Lagrange equation, and applying simulation software MATLAB / Simulink to establish a simulation model ofvehicle ride comfort. Simulated in accordance with national standards of vehicles under different speed test results, the simulation ride at different speeds time domain and frequency domain simulation results This article also during the actual car test ride, test the light of the implementation of national standard GB/T4970-1996. B-class roads in the country at different speeds on the driver's seat, co-pilot seat and left rear seat of the vertical acceleration signal was measured, obtained test ride in the time domain and frequency domain results. In the car ride simulation and experiment based on the text of the processed data results were compared, the test used in ride comfort has been evaluated, the simulation and testing the corresponding conclusionsKey words: Comfort,Eight degrees of freedom model, Road spectrum, MATLAB/Simulink 目录前言 11绪论 21.1汽车平顺性研究的意义21.2汽车平顺性研究的主要内容 21.3汽车行驶平顺性研究发展概况 42汽车行驶平顺性的评价 62.1行驶平顺性评价的研究62.2人体对振动的反应 62.3平顺性指标评价方法72.3.1ISO 2631标准评价法72.3.2吸收功率法112.4平顺性评价流程113随机路面模型的研究 133.1随机路面模型133.1.1路面不平度的概述133.1.2路面不平度的表达133.1.3时域模型143.1.4时域响应153.2建立随机路面模型 153.2.1汽车前轮所受路面随机激励153.2.2前后轮滞后输入的处理164汽车平顺性模型的建立及仿真184.1建模基本原理与要求184.1.1建模基本要求184.1.2建模基本原理194.2 汽车平顺性建模194.2.1 八自由度整车力学模型的建立204.2.2 数学模型的建立214.2.3 汽车座椅的布置254.2.4 汽车八自由度Simulink仿真模型的建立26 4.3整车平顺性仿真284.3.1仿真参数的选取 284.3.2 50km/h车速下汽车平顺性仿真结果304.3.3 60km/h车速下汽车平顺性仿真结果314.3.4 70km/h车速下汽车平顺性仿真结果325整车平顺性试验与结果分析335.1 平顺性试验原理及试验过程335.2 仿真与试验结果的数据处理345.3 仿真与试验结果的时域分析365.4 仿真与试验结果的频域分析37结论38致谢39参考文献40前言汽车平顺性主要是指保持汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定界限之内,对载货汽车还包括保持货物完好的性能,它是现代高速汽车的主要性能之一。
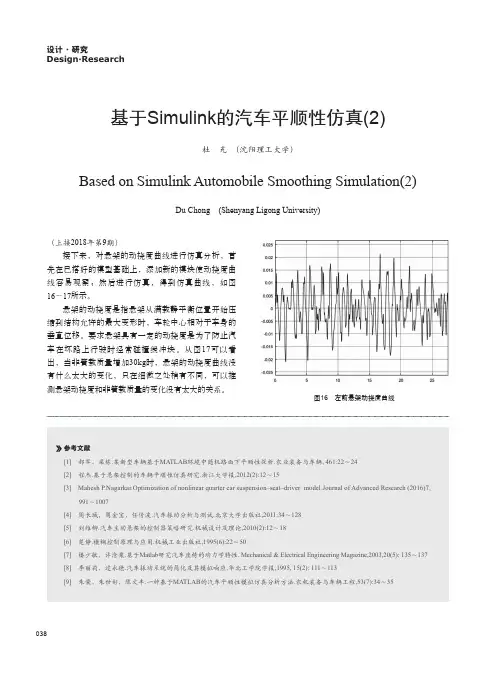
038基于Simulink的汽车平顺性仿真(2)Du Chong (Shenyang Ligong University)Based on Simulink Automobile Smoothing Simulation(2)杜 充 (沈阳理工大学)(上接2018年第9期)接下来,对悬架的动挠度曲线进行仿真分析,首先在已搭好的模型基础上,添加新的模块使动挠度曲线容易观察;然后进行仿真,得到仿真曲线,如图16~17所示。
悬架的动挠度是指悬架从满载静平衡位置开始压缩到结构允许的最大变形时,车轮中心相对于车身的垂直位移。
要求悬架具有一定的动挠度是为了防止汽车在坏路上行驶时经常碰撞缓冲块。
从图17可以看出,当非簧载质量增加30kg时,悬架的动挠度曲线没有什么太大的变化,只在细微之处稍有不同,可以推测悬架动挠度和非簧载质量的变化没有太大的关系。
图16 左前悬架动挠度曲线039图17 左前悬架动挠度原始数据与非簧载质量增加30 kg时域对比图18 左前车轮动载荷图图19 左前车轮相对动载荷图20 左前车轮动载荷原始数据与非簧载质量增加30 kg时域对比图21 左前车轮相对动载荷原始数据与非簧载质量增加30 kg 时域对比汽车在不平的路面上行驶时,每个车轮的垂向载荷都是变化的,根据力学原理,以左前轮为例,车轮的动载荷计算公式如下:(21)车轮的相对动载荷可以由公式 算得,根据公式(21)建立车轮动载荷和相对动载荷的计算模块,进行仿真,部分仿真结果如图27~29所示:本课题研究汽车汽车平顺性主要是通过改变非簧载质量来实现的,为了更直观的观察,可以将仿真图进行对比,部分对比图如图20~21所示。
根据图20~21的仿真曲线可以看出来,四个车轮的非簧载质量增加30 kg 与原始数据相比较,车轮动载荷和车轮相对动载荷都明显变大,并且四个车轮的动载荷和相对动载荷变化的幅度相差不大,影响了汽车的接地性,对汽车的操纵稳定性和行驶安全性都有很大的影响。
作业任务包括:一、建立前轮角阶跃输入的汽车三自由度操控模型,并且参数可调。
二、绘制六面体并实现对六面体的三维操作,包括平移、旋转、缩放等。
三、动画:本文动画的实现是在对六面体的具体操作过程(平移、旋转、缩放)中表现。
四、GUI与simulink的联合仿真,并将所有作业内容集成到GUI界面,将程序进行编译,打包生exe的成可执行文件。
汽车三自由度操控模型1.1建模假设:•1、汽车车速不变。
•2、不考虑切向力对轮胎特性的影响。
•3、侧向加速度不大于0.3-0.4g 。
•4、前轮转角不大,不考虑前轮左右的区别。
•5、不考虑非悬架质量的倾角。
•6、不考虑空气动力作用。
•7、侧倾中心与非悬架质心等高,前后一样。
•8、左右对称。
假设汽车的结构:•前面是独立悬架。
•后面是纵置半椭圆板簧。
•车厢侧倾引起:前轮外倾角变化;后轴发生轴转向;左右侧车轮载荷重新分配引起滚动阻力不相等而产生绕Z轴的力矩。
1.2汽车模型受力分析车辆坐标系如图1所示图1 车辆坐标系M、Ms、Mu分别是整车、悬挂和非悬挂质量,M=Ms、Mu其质心分别是c.g. 、s和u。
如图二所示图2 车辆质量分布示意图汽车三自由度模型的三个自由度指:汽车沿y 轴平动的自由度、汽车绕z 轴的转动自由度、汽车绕x 轴的转动自由度。
一般分别用横向速度v 、横摆角速度r 、侧倾角φ来表征。
汽车三自由度模型的微分方程为:()()s r z xz r p s x xz s p M v rV M h Y Y r Y Y I r I N N r N N N p I I r M h v rV L L βφδβφδφφβφδφβφδφφφ⎫++=+++⎪-=++++⎬⎪-++=+⎭(1-1)其中各个参数的意义如下:算子说明:21k k Y +=β ()211bk ak VY r -=122Y Y Y k φαφφ∂∂=-∂∂ 其中:11YY γ∂∂前轮外倾刚度;1γφ∂∂侧倾外倾角系数;2αφ∂∂后轴侧倾转向系数。
CarSim与Simulink联合仿真1 软件介绍在MA TLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具.可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具.最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。
CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3—6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。
CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。
CarSim软件的主要功能如下:●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV;●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性;●可以通过软件如MA TLAB,Excel等进行绘图和分析;●可以图形曲线及三维动画形式观察仿真的结果;●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;●程序稳定可靠;●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT,CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;●先进的事件处理技术,实现复杂工况的仿真;●友好的图形用户界面,可快速方便实现建模仿真;●提供多种车型的建模数据库;●可实现用户自定义变量的仿真结果输出;●可实现与simulink的相互调用;●多种仿真工况的批运行功能;2 CarSim与Simulink联合仿真2。
车辆悬架四分之一整车模型的Simulink建模与仿真车身质心加速度相对动载荷悬架动行程Simulink建模与仿真运用simulink 中的状态空间模型计算四分之一车模型的,ACC ,DTL 和SWS 。
首先运用吴志成老师一片文献的方法利用simulink 建立路面不平度模型,生成路面谱。
所运用的公式如下:q (t )=−0.111∗v ∗q (t )+0.111∗40∗√G q (n 0)∗v利用上述式子得出路面不平度生成如下所示:图1 路面谱生成因为选择的是E 级路面,40KM/h ,因此增益2和3分别为,11.1111和8.5333。
此外,限带白噪声功率的大小为白噪声的协方差与采样时间的乘积。
又白噪声W E (t)的协方差满足下式:E [w E (t )w E (t +τ)]=2ρ2αvδ(τ)此处δ(τ)为脉冲函数,并且选择采样时间为0.01s ,则计算可得白噪声功率为8.9*10-3。
计算的路面不平度均方根值为0.0531m 。
四分之一车模型根据拉格朗日方程有下式:状态空间模型:xb=z2 xw=z1 kt=k1 ks=k2 mb=m2 mw=m1 xr=u建立状态方程和输出方程,在此选取状态变量向量为:X =[z1,z2,z1,z2]′0)()(=-+-+w b s w b b b x x k x x C xM ()()()0w w w b s w b t w r x C x k x x k x x x M +-+-+-=输入向量为:u=[qt]′则输出向量为Y=[z2,z2,(z1−u)∗ktm2∗g,z2−z1]′建立如下的状态方程和输出方程:X=AX+BuY=CX+du 解得A,B,C,D分别为:A=[0010001−(k1+k2)/m1k2/m2k2/m1−k2/m2−c/m1c/m1c/m2−c2/m2]B=[0 0 k1m10]′C=[k2m2 −k2m2cm2−cm2; 0 1 0 0;k1m2g0 0 0;−1 1 0 0]D=[0 0−k1m2g0]′将各个已知量代入即可得出具体的矩阵。
MATLAB/Simulink软件仿真平台之车辆模型新能源车控制策略仿真平台主要包括驾驶员模型、控制策略、车辆模型三部分,如下图所示。
今天我们详细说说第三部分车辆模型(车辆平台)的相关内容,也是最复杂的部分。
车辆模型需求分析车辆模型,从字面上理解就是把整车抽象出来,建立其数学模型,用于仿真研究或控制开发。
广义上的车辆模型应该是包括纵向、侧向、垂向三个方向的动力学模型,是一个及其复杂的系统。
通常,我们会根据实际的研究需要,搭建一个方向或两个方向的动力学模型。
这次我们搭建的增程式电动汽车软件仿真平台,主要用于验证车辆能量管理相关的控制策略,仅需要与驱动、制动相关的车辆纵向动力学模型,再加上增程器、电池等子系统模型(为简化建模搭建,忽略部件响应延迟以及部分摩擦)。
1、增程器模型需求增程器主要包括发动机、发电机,二者一般直连在一起,构成一个提供电能的增程器。
发动机启动过程中,发电机出正扭矩把发动机拉到点火转速后,发动机自行点火启动;发动机启动成功后,发动机出正扭矩,发电机出负扭矩发电同时维持发动机转速恒定;发动机停机过程中,发动机和发电机停止出力,在发动机摩擦力的作用下发动机转速会慢慢降为0。
增程器模型输入:发动机扭矩请求(来自控制策略,这里用固定的节气门开度近似代替)发电机扭矩请求(来自控制策略,这里用扭矩请求百分比信号近似代替)高压电池电压(来自高压电池实际状态)。
增程器模型输出;发电机充放电电流(充电为负,放电为正)模型物理关系:发动机实际扭矩=MAP1(发动机实际转速,发动机节气门开度)发电机实际扭矩=MAP2(发电机实际转速)* 发电机扭矩请求百分比发动机转速(即发电机转速)由增程器系统的动力学决定,TENG+TGM=(JENg+JGM)*dw/dt发电机充放电电流由功率守恒计算,充电时TGM*WGM*φ=UBATT*IGM,放电时TGM*WGM/φ=UBATT*IGM2、纵向动力学模型需求增程式电动汽车的纵向动力学模型与纯电车一样,由电机、主减速器、轮胎、车身等。
基于Simulink的四轮独立驱动电动汽车建模Simulink是MATLAB的一个工具箱,用于建模和仿真系统。
基于Simulink的四轮独立驱动电动汽车建模,需要先了解电动汽车的原理和模型。
一个基本的电动汽车模型包括电池模型、电机模型、电子控制模型和机械传动模型。
首先,我们需要确定模型的输入和输出变量。
四轮独立驱动电动汽车的输入变量为电池电压、电机控制命令、转向角度和制动力;输出变量为车辆速度、车辆位置和车辆加速度。
在Simulink中,我们可以将这些变量表示为信号线,并使用不同的模块进行处理。
电动汽车建模的主要步骤如下:1. 电池模型建立:根据电池的特性,选择最适合的电池模型。
一般使用RC等效电路和电化学模型。
2. 电机模型建立:根据电机的特性,选择最适合的电机模型。
一般使用等效电路和磁路分析法。
3. 电子控制模型建立:根据电机控制器的特性,选择最适合的控制器模型。
一般使用PID控制器或者FOC(Field Oriented Control)控制器。
4. 机械传动模型建立:根据车辆传动系统的特性,选择最适合的传动模型。
一般使用能量守恒法和马力平衡法。
5. 系统集成和模拟:将上述模型集成到一个系统模型中,并进行模拟。
在模拟过程中,我们可以通过调整模型参数和仿真条件,对车辆性能进行分析和优化。
同时,还可以添加故障和异常情况进行仿真,以提高电动汽车的鲁棒性和安全性。
总之,基于Simulink的四轮独立驱动电动汽车建模是一个复杂而有趣的过程,需要深入理解电动汽车的原理和模型,才能构建准确、可靠的模型。