adams和simulink联合仿真的案例分析
- 格式:doc
- 大小:18.00 KB
- 文档页数:4
万方数据2009年10月刘贵杰等:基于Adams与Matlab/Simulink的水下自航行器协同仿真23的损失。
传统的AUV仿真多集中于数学建模仿真【2】和Simulink控制仿真【31,进而依据仿真曲线分析优化AUV的设计。
这些工作大多偏重计算仿真而忽略图形仿真,不能直观地展现AUV的运动过程,人机交互不足。
后来有学者尝试将虚拟现实技术应用于AUV设计研究卜61,获得了较好的图形仿真界面,解决了人机交互问题;但由于采用的是简化模型和单一的仿真环境,很难综合考虑水动力参数影响,难免会影响仿真结果。
文献【7]利用流体分析软件FLUENT和仿真控制软件Simulink提出协同仿真的解决方案,它克服了AUV仿真中动态行为、流体动力学不足的局限,获得比较好的仿真结果;但系统计算量比较大,实时性和图形界面受限制。
良好的图形界面及人机互动代价大多是仿真系统的复杂化、水动力学仿真性能的减弱和实时性不足,它们之间的优化协调成了AUV仿真的难点。
针对上述问题,本文尝试将虚拟样机技术应用到AUV的仿真分析中,利用虚拟样机分析软件和控制仿真软件联合建立课题组研发的开架式水下自航行器(课题组命名为C—Ranger,简写为CR.AUV)的虚拟样机系统,并在此基础上对设计的空间动态定位控制算法进行仿真分析,验证算法的可行性和有效性。
1AUV虚拟样机模型的建立课题组研发的水下自航行器CR.AUV是一种5自由度低成本开放框架式结构的科研原型样机,采用两舱五推进器的结构模式,整体布局及三维几何模型如图l所示。
图1AUV结构布局示意图1.支架2.仪器仪表高压舱3.两个水平推进器4.三个竖直推进器5.电池高压舱CR-AUV长1.63m,宽1.27m,高1.08m,总排水量208L,正常挂负载工作时总质量为206kg,稳心高度h:0.09m。
1.1虚拟样机的数理模型研究水下自航行器运动学问题首先需要确立一个惯性坐标系。
本文以虚拟环境中的地面坐标系鳓f作为惯性参考坐标系,也称为静坐标系,规定静坐标系原点为虚拟环境的测量零点,Ⅸ指向地心、必指向地理东、励指向地理南。
相信大家在联合仿真ADAMS和SIMULINK时都会遇到很多的问题:ADA MS/contro中的例子ball_beam通过联合仿真,更容易理解a dams和simulink的联合仿真精髓。
小球在一脉冲力的作用下沿着横梁滚动,此时梁的两端受力不平衡,梁的一段倾斜,为了使得小球不掉下横梁,在横梁上施加一个绕Z轴的力矩,横梁达到一定的角度之后逆向转动,然后小球就在这个作用力矩的控制下来回滚动而不掉下横梁!其中控制力矩在整个过程中是个动态变化的,力矩Torque_In是通过位移Position 和横梁转角Bea m_Angle确定,这个是在simulink中通过框图完成的。
首先我申明一下我用的是adams2003和matlab6.5以下我说明一下我的操作步骤:1、把control中的ball_beam文件copy到另外一个文件夹下,同时设置adams和matlab的默认路径即为ball_beam文件夹,这样可以省略很多不必要的麻烦!2、用aview打开ball_beam.cmd文件,先试试仿真一下,可以看到小球会在脉冲的作用下滚动,仿真时间最好大于8s3、载入control模块,点击tools|plugin manager在contro l框选定。
4、点击control|plant export在file prefix下输入你的文件名,这个可以随便的,我输入的是myball,在plant input点击右键点击guess选定tmp_MDI_PINPUT,在tmp_MDI_PINPUT 中就是输入力矩Torque_In,只有一个输入参数;同样在plant output中点击右键guess选定tmp_MDI_POUTPUT,这是模型的输出变量横梁转角Beam_Angle和小球与横梁中心轴的距离position。
controlpackage选择matlab,type是non_linear,初始化分析选择n o,然后按ok!此时m文件已经生成了!5、打开matalb,设置你的工作路径在ball_beam文件夹上,键入myball,马上有%%% INFO : ADAMS plant actuators names :1 Torque_In%%% INFO : ADAMS plant sensors names :1 Beam_Angle2 Position出现6、再键入adams_sys,弹出一个控制框图,这时可以新建一个mdl文件,将adams_sub拖入你新建的mdl框图中,其实再这里有一个偷懒的办法,就是在matlab中打开ball_beam.md l文件,然后把他的那个adams_sub用你的刚产生的这个代替,然后另存为my_ball.mdl!7、设置仿真参数,在你刚建立的my_ball.mdl框图上的simul ation parameter里设置一下stop time为10s,步长为ode1 5s。
基于ADAMS与Simulink的机电一体化系统联合仿真Co-simulationofMechatronicsSystemBasedonADAMSandSimulink任远白广忱(北京航空航天大学能源与动力工程学院,北京100083)摘要:以雷达天线为研究对象,针对天线的方位角控制问题在ADAMS和Simulink的基础上进行了机电一体化仿真研究。
首先利用ADAMS/Controls模块把MATLAB/Simulink与雷达天线样机模型连接在一起,然后分别采用PID算法、PD算法以及模糊理论这3种方法来建立天线方位角控制系统。
仿真结果表明,对于雷达天线这样一个输入输出特性比较复杂且不便于简化建模的受控对象(因为不能忽略天线支撑的柔性及其扭振),模糊控制比前两种经典控制算法更为有效。
关键词:联合仿真雷达天线方位角控制模糊控制doi:10.39690.issn.1007-080X.2009.06.002Abstract:Takingaradarantennaa8researchobjective.themechatronicssimulationbasedonADAMSandSim曲nkWaScarriedouttosolvetheproblemofcontrollingtheantennaazimuth.111evirtualprototypeoftheradarantennawsgcoilnectedtoMATLAB/SimulinkbyADAMS/Controls.Thenthreemethods,i.e.PID,PDand缸研theory,wereutilizedtoestablishtheantennaazimutIIcontrolsystem.Theresultsofthesimulationshowthatfuzzycontrolismoreeffectivethantheothertwoclassiccontrolstrategiesfortheradarantenna,whichhasacomplexinput/outputrelationshipandishardtosimplifybecauseoftheflexibilityoftheantennasupportandthepossibilityofitstorsionalvibration.Keywords:CO—simulationradarantennaazimuthcontrolfuzzycontrolO引育在传统的机电一体化系统设计过程中.机械工程师和控制工程师虽然在共同开发一个系统.但却需要为同一对象建立起各自不同的分析模型.然后在不同的软件平台上进行相互独立的测试与验证.直到在建造物理样机之后才能进行机械一控制系统综合试验。
电铲工作装置EDEM Adams Simulink联合动态仿真电铲是一种用于挖掘和搬运土石等物料的工程机械设备,广泛应用于矿山、建筑工地和水利工程等领域。
电铲的工作装置是其核心部件,直接影响到电铲的挖掘效率和运行稳定性。
为了更好地理解电铲工作装置的动态特性,工程师们常常利用动态仿真技术进行研究和优化。
本文将介绍一种基于EDEM和Adams Simulink联合动态仿真的方法,以及其在电铲工作装置设计中的应用。
EDEM是一种专门用于颗粒动力学仿真的软件,可以模拟颗粒物料在不同工况下的运动和相互作用。
Adams Simulink是一种多体动力学仿真软件,可以模拟机械系统的运动和力学特性。
将EDEM和Adams Simulink两种软件进行联合仿真,可以更加真实地模拟电铲在挖掘和搬运过程中的工作情况,有助于工程师深入理解电铲工作装置的动态特性和工作原理。
我们需要建立电铲工作装置的三维模型。
对于电铲来说,其工作装置主要包括铲斗、铲杆和升降机构等部件。
利用EDEM软件可以对铲斗进行颗粒动力学仿真,模拟挖掘物料的过程,包括物料的流动、堆积和碰撞等。
利用Adams Simulink软件可以对铲杆和升降机构等部件进行多体动力学仿真,模拟电铲的各个部件在不同工况下的运动和力学特性。
我们可以利用联合动态仿真技术进行电铲工作装置的设计优化。
通过对电铲在不同工况下的动态特性进行仿真分析,可以找到电铲工作装置的优化方案,包括改进铲斗结构、优化铲杆长度和升降机构设计等措施,以提高电铲的挖掘效率和运行稳定性。
利用EDEM和Adams Simulink联合动态仿真技术可以更加真实地模拟电铲工作装置的动态特性,有助于工程师深入理解电铲的工作原理和优化设计方案。
相信随着这一技术的不断发展和应用,将为电铲工作装置的研究和设计提供更加有效的工具和方法。
Adams与Matlab联合仿真例子作者寄语:这个文件是基于李增刚《adams入门详解与实例》一书中,Adams与Matlab联合仿真的例子,以及一个名为《2013版ADAMS与Matlab联合仿真(绝对正确版)》的pdf文件上修改来,为了方便起见,用了一些复制、粘贴,所以中间的一些过程会和这两个文件有所重合,不要惊讶,也不要吐槽。
做这个例子的目的,是站在一个普通学习者的角度,介绍联合仿真,和众多学习adams的人共勉。
我的结论是:以上两个例子中的结果并不矛盾,都是正确的,基本上看了我的例子后,他们的也就懂了。
李增刚/uxjACUp7U7Hzf 第236页开始。
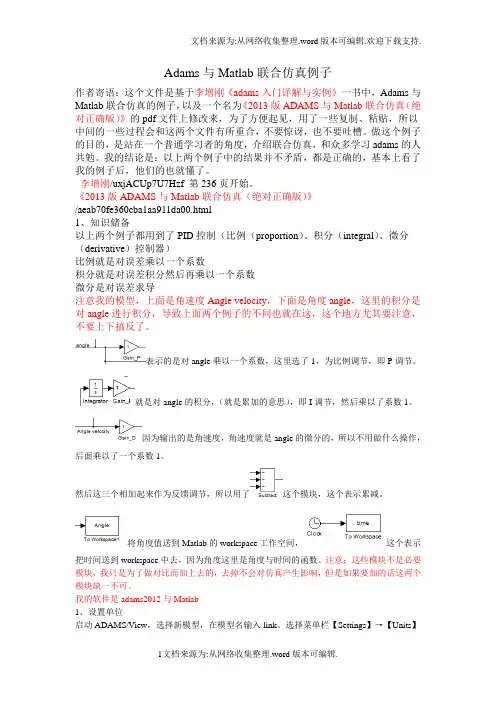
《2013版ADAMS与Matlab联合仿真(绝对正确版)》/aeab70fe360cba1aa911da00.html1、知识储备以上两个例子都用到了PID控制(比例(proportion)、积分(integral)、微分(derivative)控制器)比例就是对误差乘以一个系数积分就是对误差积分然后再乘以一个系数微分是对误差求导注意我的模型,上面是角速度Angle velocity,下面是角度angle,这里的积分是对angle进行积分,导致上面两个例子的不同也就在这,这个地方尤其要注意,不要上下搞反了。
表示的是对angle乘以一个系数,这里选了1,为比例调节,即P调节。
就是对angle的积分,(就是累加的意思),即I调节,然后乘以了系数1。
因为输出的是角速度,角速度就是angle的微分的,所以不用做什么操作,后面乘以了一个系数1。
然后这三个相加起来作为反馈调节,所以用了这个模块,这个表示累减。
将角度值送到Matlab的workspace工作空间,这个表示把时间送到workspace中去,因为角度这里是角度与时间的函数。
注意:这些模块不是必要模块,我只是为了做对比而加上去的,去掉不会对仿真产生影响,但是如果要加的话这两个模块缺一不可。
一种基于ADAMS—SIMULINK的机械臂关节动力学分析和联合仿真作者:李科姜迪开王娟来源:《电子技术与软件工程》2017年第12期摘要本文运用ADAMS软件对一种机械臂关节的虚拟动力学模型进行了建模,建模过程中充分考虑了齿轮的啮合刚度、运动副之间的阻尼、负载惯量、传动比以及齿轮间隙等因素。
其中,齿轮的啮合刚度和负载惯量对机械臂关节的频率特性起关键性作用。
研制了机械臂关节的样机。
为了改善机械臂关节机电系统的伺服特性,利用ADAMS-SIMULINK联合仿真建立了机械臂关节的伺服控制模型,将关节的ADAMS动力学模型中的传感器和执行器参数直接嵌入到MATLAB环境中,形成伺服控制系统设计。
通过比对样机的实验数据,对虚拟样机参数进行了优化。
所以,机械臂关节的复杂动力学模型可以用于指导关节的设计、仿真和试验。
【关键词】机械臂联合仿真动力学分析机电伺服控制系统1 引言在提供营救发射失败的卫星和清除太空垃圾等飞行器上,需要安装一种轻型机械臂。
为了提高这种机械臂的柔性、可操作性和抓取性能,技术的关键在于使机械臂的关节更小巧更轻便。
本文提供了一种用于机械臂关节的动力学特性和伺服特性分析的有效方法。
国际研究机构已经对机械臂进行了深入研究,其中包括加拿大国际空间站的的MSS(Mobile Servicing System),它由MBS (Mobile Remote Servicer Base System),SSRMS (Space Station Remote Manipulator System)和 SPDM (Special Purpose Dexterous Manipulator)组成[1];FTS(Flight Telerobotic Servicer)[2], Skyworker[3], Robonaut [4] 和美国的 ORBITAL EXPRESS [5],日本的 JEMRMS (Remote Manipulator System)和ETS-VII;以及欧洲的European ERA(The European Robotic Arm), ROTEX 和 ROKVISS。
相信大家在联合仿真ADAMS和SIMULINK时都会遇到很多的问题:ADA MS/contro中的例子ball_beam通过联合仿真,更容易理解a dams和simulink的联合仿真精髓。
小球在一脉冲力的作用下沿着横梁滚动,此时梁的两端受力不平衡,梁的一段倾斜,为了使得小球不掉下横梁,在横梁上施加一个绕Z轴的力矩,横梁达到一定的角度之后逆向转动,然后小球就在这个作用力矩的控制下来回滚动而不掉下横梁!其中控制力矩在整个过程中是个动态变化的,力矩Torque_In是通过位移Position 和横梁转角Bea m_Angle确定,这个是在simulink中通过框图完成的。
首先我申明一下我用的是adams2003和matlab6.5以下我说明一下我的操作步骤:1、把control中的ball_beam文件copy到另外一个文件夹下,同时设置adams和matlab的默认路径即为ball_beam文件夹,这样可以省略很多不必要的麻烦!2、用aview打开ball_beam.cmd文件,先试试仿真一下,可以看到小球会在脉冲的作用下滚动,仿真时间最好大于8s3、载入control模块,点击tools|plugin manager在contro l框选定。
4、点击control|plant export在file prefix下输入你的文件名,这个可以随便的,我输入的是myball,在plant input点击右键点击guess选定tmp_MDI_PINPUT,在tmp_MDI_PINPUT 中就是输入力矩Torque_In,只有一个输入参数;同样在plant output中点击右键guess选定tmp_MDI_POUTPUT,这是模型的输出变量横梁转角Beam_Angle和小球与横梁中心轴的距离position。
controlpackage选择matlab,type是non_linear,初始化分析选择n o,然后按ok!此时m文件已经生成了!5、打开matalb,设置你的工作路径在ball_beam文件夹上,键入myball,马上有%%% INFO : ADAMS plant actuators names :1 Torque_In%%% INFO : ADAMS plant sensors names :1 Beam_Angle2 Position出现6、再键入adams_sys,弹出一个控制框图,这时可以新建一个mdl文件,将adams_sub拖入你新建的mdl框图中,其实再这里有一个偷懒的办法,就是在matlab中打开ball_beam.md l文件,然后把他的那个adams_sub用你的刚产生的这个代替,然后另存为my_ball.mdl!7、设置仿真参数,在你刚建立的my_ball.mdl框图上的simul ation parameter里设置一下stop time为10s,步长为ode1 5s。
基于ADAMS和Simulink的太阳跟踪器联合仿真郑黎明;黄剑波【摘要】为了了解太阳跟踪器的具体性能,提高设计效率,采用ADAMS和Simulink软件对太阳跟踪器的工作过程进行了虚拟仿真分析.首先利用ADAMS软件建立了系统的动力学模型;利用Simulink软件建立了基于速度闭环的双轴控制系统.然后搭建了机-电联合仿真模型,并进行了仿真研究.分析了太阳跟踪器双轴控制系统的基本性能,确定了太阳跟踪器的目标输入曲线,完成了联合仿真计算.联合仿真结果表明:系统对太阳高度角输入曲线具有较好的跟踪能力,开始跟踪1.5s后系统跟踪非常稳定,跟踪误差小于目标幅值0.1%.得到的结果表明:所建的动力学模型和控制系统模型能够准确地描述跟踪器的工作过程,提高设计效率,可为实际物理样机的开发提供可靠依据.【期刊名称】《光学精密工程》【年(卷),期】2014(022)005【总页数】8页(P1212-1219)【关键词】太阳跟踪器;虚拟样机;联合仿真;ADAMS;Simulink【作者】郑黎明;黄剑波【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文【中图分类】V5561 引言太阳跟踪器能够搭载某些光电仪器载荷,完成对日轨迹跟踪,从而辅助这些载荷实现对日观测工作[1,2]。
太阳跟踪器实际上是一种光电经纬仪[1-3],根据不同地点对日观测的需求,需选用不同的结构形式,具体包括水平式和地平式两种[4-5]。
实现天顶观测时,一般采用水平式结构,其由经轴和纬轴构成,工作时经轴轴线与地球经线重合,纬轴轴线则在某一地球纬线平面内,但该结构无法对初升太阳进行精确跟踪。
不需对天顶观测时,可采用地平式结构,其由方位轴和俯仰轴构成,方位轴实现方位角调整,俯仰轴实现俯仰角调整,这种结构能够完成初升太阳的精确跟踪。
本文研发了某种型号的太阳跟踪器,用于对北半球高纬度地区的太阳观测。
基于ADAMS与MATLAB的倒立摆联合仿真实验5篇第一篇:基于ADAMS与MATLAB的倒立摆联合仿真实验基于ADAMS与MATLAB的倒立摆联合仿真实验一、实验目的在传统的机电一体化研究设计过程中,机械工程师和控制工程师虽然在共同设计开发一个系统,但是他们各自都需要建立自己的模型,然后分别采用不同的分析软件,对机械系统和控制系统进行独立的设计、调试和试验,最后进行机械系统和控制系统各自的物理样机联合调试,如果发现问题又要回到各自的模型中分别修改,然后再联合调试,显然这种方式费时费力。
基于多领域的建模与联合仿真技术很好的解决了这个问题,为机械和控制系统进行联合分析提供了一种全新的设计方法。
机械工程师和控制工程师就可以享有同一个样机模型,进行设计、调试和试验,可以利用虚拟样机对机械系统和控制系统进行反复联合调试,直到获得满意的设计效果,然后进行物理样机的建造和调试。
ADAMS与MATLAB是机械系统仿真和控制系统仿真领域应用较为广泛的软件,其中ADAMS为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,具有十分强大的运动学和动力学分析功能;而MATLAB具有强大的计算功能、极高的编程效率及模块化的建模方式,因此,把ADAMS与MATLAB联合起来仿真,可以充分将两者的优势相结合,将机械系统仿真分析同控制系统设计有机结合起来,实现机电一体化的联合分析。
本实验以倒立摆为例,进行ADAMS与MATLAB的联合仿真,对倒立摆的运动性能和运动规律进行分析。
二、实验方法软件环境:MD ADAMS R3,MATLAB R2009b 2.1 建立倒立摆的动力学模型启动ADAMS/View模块弹出如图1所示对话框,建立小车及摆杆模型。
首先选择“Create a new model”选项,创建一个新的模型,将该文件保存在相应的文件夹下,本实验将结果保存在E:daolibai_adams文件夹下,将文件名取为“daolibai_adams”,其余选项保持默认。
电铲工作装置EDEM Adams Simulink联合动态仿真引言:电铲工作装置是大型挖掘机的重要组成部分,它通过一系列的动作来完成挖土、装载等作业任务。
为了确保电铲工作装置的稳定性和性能,需要进行动态仿真来验证和优化设计方案。
本文将介绍一种基于EDEM、Adams和Simulink的联合动态仿真方法,以验证电铲工作装置的性能。
一、电铲工作装置的工作原理电铲工作装置由挖斗、铲杆、翻转臂、回转系统、液压系统等部分组成。
在工作时,液压系统通过控制液压缸和液压阀来实现铲杆和挖斗的运动,同时通过驱动电机和齿轮来实现翻转臂和回转系统的运动。
整个过程需要保证各部件之间的协调运动,以完成挖掘、装载等作业任务。
二、EDEM的应用EDEM是一款基于离散元素方法(DEM)的颗粒流动模拟软件,其可以模拟颗粒材料在运动过程中的动力学行为。
在电铲工作装置的仿真中,EDEM可以模拟挖掘、装载等过程中土石颗粒的运动和互动,从而可以评估挖掘力、装载稳定性等性能指标。
三、Adams的应用Adams是一款多体动力学仿真软件,其可以模拟多体系统在力和运动学约束下的运动行为。
在电铲工作装置的仿真中,Adams可以模拟铲杆、挖斗、翻转臂等部件的运动,同时考虑挖掘力、惯性力、地形阻力等外部力的作用,从而可以评估各部件的受力情况和协调运动。
四、Simulink的应用Simulink是一款基于图形化建模的仿真软件,其可以模拟系统的控制逻辑和动态响应。
在电铲工作装置的仿真中,Simulink可以模拟液压系统的控制逻辑和动作响应,同时考虑液压缸、液压阀的压力、流量等特性,从而可以评估液压系统的动态性能。
五、联合动态仿真方法为了更真实地模拟电铲工作装置的工作过程,可以将EDEM、Adams和Simulink进行联合动态仿真。
使用EDEM模拟挖掘、装载等过程中土石颗粒的运动和互动,得到挖掘力、装载稳定性等性能指标;然后,将这些结果作为Adams的输入,模拟铲杆、挖斗、翻转臂等部件的运动以及受力情况;将Adams的结果作为Simulink的输入,模拟液压系统的控制逻辑和动作响应,评估液压系统的动态性能。
密级:公开版权所有者,及“ KHTEC”商标所有人长春孔辉汽车科技有限公司CAE能力建设报告以ABS为例说明ACAR与MATLAB联合仿真报告人:房策审核:房策日期:以ABS为例说明ACAR与MATLAB联合仿真一,仿真前准备 (3)1.1仿真连接需要的库函数 (3)1.2ADAMS和MATLAB版本 (3)二,制作ABS仿真制动器模块 (3)2.1理解共享模板制动器模型 (3)2.2建立ABS开关信号(以左后轮为例) (5)三、导出ABS控制平台 (5)四,修改生成文件 (7)五,联合仿真 (8)六、参考文献 (9)一,仿真前准备1.1仿真连接需要的库函数文件名:DecodeAdams_plantAdams_serverPlant可从文件连接库函数压缩包中查找需要将库函数放置到MATLAB/WORK文件夹下。
1.2ADAMS和MATLAB版本两个软件版本能够匹配是联合仿真成功的关键,推荐使用:ADAMS2007MDR2,和MATALB 7.0 R14,迅雷上都可以下载到。
二,制作ABS仿真制动器模块2.1理解共享模板制动器模型_brake_system_4Wdisk.tpl模板查看每个制动力矩变量的定义原理:以左右轮为例图2.1-1左右轮制动力矩变量截图其定义方程为:2*._brake_system_4Wdisk.pvs_rear_piston_area*varval(._brake_system_4Wdisk.rear_brake_line_pressure)*._brake_system_4Wdisk.pvs_rear_brake_mu*._brake_system_4Wdisk.pvs_rear_ effective_piston_radius*STEP(V ARV AL(._brake_system_4Wdisk.left_rear_wheel_omega), -0.0175,1,0.0175,-1)其中:“2”表示双面;rear_piston_area表示盘式制动器作用半径rear_brake_line_pressure表示后轴制动分配比例brake_mu表示制动片摩擦系数rear_ effective_piston_radius表示制动器作用半径left_rear_wheel_omega表示左右轮车轮转速,正值STEP函数用作连续过度车轮正反转切换时的制动力矩。
【分享】经验之谈:如何顺利实现adams和simulink的联合仿真?论坛中有关adams和simulink联合仿真的帖子不少,部分是成功者的经验,多数是初学者的疑惑。
怎么安装和找到control模块,怎么在control中生成必需的中间文件,为什么仿真会失败?本人也曾对这些问题困惑过,经过一番摸索,积累了一点经验,愿与大家商讨。
对于第一个问题,我想就不必多说了。
对于第二个问题可以参考郑建荣的ADAMS虚拟样机技术入门与提高第十三章机电一体化系统仿真部分,书中有两个问题需要注意:(1)书中介绍的ADAMS版本好像是10.0的,对于使用12.0的有一些差异:在Plant Export设置中无法直接选择输入输出变量control_torque、azimuth_position、rotor_velocity,它们分别由专门的宏tmp_MDI_PINPUT和tmp_MDI_POUTPUT表示。
(2)天线仰角的方位角似乎应该是elevation_position,而不是azimuth_position,后者是天线支撑的转角。
其它按文中所述步骤进行,File Prefix 栏可随便写,不必一定用ant_test,最后在ADAMS的当前目录下生成四个文件:ant_test.cmdant_test.admant_test.acfant_test.m第三个问题基本上是由于没有正确设置路径,找不到所需的文件造成的:~),这也说明了control模块在设计时没有很好地考虑健壮性问题。
具体来说simulink在开始仿真时要找到以下这些文件:1。
上述生成的文件,主要是ant_test.m和ant_test.cmd,ant_test.m用于在simulink中对control模块环境和一些参数进行初始化,它必须在仿真前执行;ant_test.cmd是天线模型定义文件,由于这里ADAMS是作为simulink创建的一个子进程而被启动的,它所需的模型文件名由simulink的调用参数传过来的,所以simulink要能够定位ant_test.cmd (我一开始把它放到adams当前目录下,频频失败)。
基于ADAMS与Simulink的机电一体化系统联合仿真 1段景文发布时间:2021-09-09T10:00:22.714Z 来源:《中国科技人才》2021年第17期作者: 1段景文 2张文泽[导读] 本文主要针对天线的方位角控制问题进行研究,并以雷达天线为研究对象,基于ADAMS和Simulink进行机电一体化仿真研究。
郑州飞机装备有限责任公司河南省郑州市 450000摘要:本文主要针对天线的方位角控制问题进行研究,并以雷达天线为研究对象,基于ADAMS和Simulink进行机电一体化仿真研究。
研究首先利用控制模块把MATLAB/Simulink与雷达天线样机模型连接在一起,然后分别采用三种不同的理论方法,来建立天线方位角控制系统。
这三种不同的理论分别是PID算法,PD算法以及模糊理论。
关键词:雷达天线;联合仿真;方位角控制;模糊控制引言现如今,伴随着虚拟样机(virtual prototyping)技术的不断发展,仿真平台不再是传统的机械工程师和控制工程师分别独立进行设计,而是可以共享同一个样机模型。
例如:①共享样机体系,有利于机械工程师和控制工程师在仿真分析中,充分考虑彼此各种因素对控制系统造成的影响。
②共享样机体系显著降低了物理样机测试环节的工作量,工程师不必再一次又一次的重复测验。
③在测验过程中,使用真实的机械磁系统,提高了控制系统设计的成功率。
④运营共享样机体系有利于缩短设计周期,从而降低研发成本。
因此,本文主要以雷达天线为研究对象,针对天线的方位角控制问题,并且在ADAMS和Simulink的基础上,对机电一体化器械进行仿真研究。
并在此基础上采用PID算法,PD算法以及模糊理论这三种方法,共同建立天线方位角控制系统。
1基于ADAMS和Simulink的联合仿真ADAMS是原美国MDI公司开发的一款仿真软件,主要应用的是机械系统动力学。
在ADAMS和Simulink主要有六种方法可以建立机电设备的控制系统网络,这六种方法分别是:①运用关于时间的函数处理力与力矩的关系;②编写用户子程序,使其能够表达控制规则;③使用ADAMS/View控制工具箱;④借助ADAMS/Linear模块导出系统的状态矩阵;⑤利ADAMS/Controls模块把Simulink模块连结在一起,共同进行联合仿真;⑥将Simulink中的模块转化为Fortran代码,并将其导入ADAMS作为广义状态方程。
《现代数控技术及装备》
课程设计报告
题目:三轴数控铣床进给系统的ADAMS和SIMUILNK联合仿真
学院:机械工程学院
班级:
姓名:
学号:
摘要
以某数控三轴立式铣床为对象,通过测绘,利用SolidWorks建立三轴立式铣床整机模型。
本文在此模型的基础上,将机床整机模型导入ADAMS 中,并在ADAMS 中添加约束和驱动;利用虚拟样机技术建立了机床伺服进给驱动系统多体动力学模型,通过MATLAB/Simulink 模块建立了机床伺服进给驱动系统控制模型,通过ADAMS/Controls 模块作为两软件的接口,将ADAMS中的机械模型的位移、速度等输出反馈给控制模型,建立了机床进给驱动系统的机电联合仿真模型,实现了复杂机电系统的联合仿真,仿真结果表明机床整机进给系统具有良好的动态响应特性。
并为机床进给系统的设计与调试提供可靠依据。
关键词: 虚拟样机技术; 伺服进给驱动系统; 机电联合仿真
目录
1 绪论 (1)
1.1 背景 (1)
1.2 本文主要涉及内容 (1)
2数控铣床的整机建模 (2)
2.1X和Z向进给系统建模 (2)
2.2 Y向进给系统建模 (2)
3 动力学建模 (4)
3.1 模型导入 (4)
3.2 运动学仿真 (4)
3.3 动力学系统建模 (5)
3.4 动力学模型导出 (6)
4 ADAMS/Simulink联合仿真 (7)
4.1 联合仿真的创建 (7)
4.2联合仿真分析 (8)
4.3 联合仿真的结论 (11)
5 总结 (12)
结束语 (13)
参考文献 (14)
附录 (15)。
相信大家在联合仿真ADAMS和SIMULINK时都会遇到很多的问题:ADAMS/contro中的例子ball_beam通过联合仿真,更容易理解adams和simulink的联合仿真精髓。
小球在一脉冲力的作用下沿着横梁滚动,此时梁的两端受力不平衡,梁的一段倾斜,为了使得小球不掉下横梁,在横梁上施加一个绕Z轴的力矩,横梁达到一定的角度之后逆向转动,然后小球就在这个作用力矩的控制下来回滚动而不掉下横梁!其中控制力矩在整个过程中是个动态变化的,力矩Torque_In是通过位移Position 和横梁转角Beam_Angle确定,这个是在simulink中通过框图完成的。
首先我申明一下我用的是adams2003和matlab6.5
以下我说明一下我的操作步骤:
1、把control中的ball_beam文件copy到另外一个文件夹下,同时设置adams和matlab的默认路径即为ball_beam文件夹,这样可以省略很多不必要的麻烦!
2、用aview打开ball_beam.cmd文件,先试试仿真一下,可以看到小球会在脉冲的作用下滚动,仿真时间最好大于8s
3、载入control模块,点击tools|plugin manager在control框选定。
4、点击control|plant export在file prefix下输入你的文件名,这个可以随便的,我输入的是myball,在plant input点击右键点
击guess选定tmp_MDI_PINPUT,在tmp_MDI_PINPUT中就是输入力矩Torque_In,只有一个输入参数;同样在plant output 中点击右键guess选定tmp_MDI_POUTPUT,这是模型的输出变量横梁转角Beam_Angle和小球与横梁中心轴的距离position。
control
package选择matlab,type是non_linear,初始化分析选择no,然后按ok!此时m文件已经生成了!
5、打开matalb,设置你的工作路径在ball_beam文件夹上,键入myball,马上有
%%% INFO : ADAMS plant actuators names :
1 Torque_In
%%% INFO : ADAMS plant sensors names :
1 Beam_Angle
2 Position
出现
6、再键入adams_sys,弹出一个控制框图,这时可以新建一个mdl文件,将adams_sub拖入你新建的mdl框图中,其实再这里有一个偷懒的办法,就是在matlab中打开ball_beam.mdl文件,然后把他的那个adams_sub用你的刚产生的这个代替,然后另存为my_ball.mdl!
7、设置仿真参数,在你刚建立的my_ball.mdl框图上的simulation parameter里设置一下stop time为10s,步长为ode15s。
然后双击adams_sub打开adams_pant,再双击adams_pant弹出一个设置框图,在animation mode这一栏中选择interactive这是交互的,如果选择batch的话在联合仿真中看不到adams模型的运行情况(个人这样理解的:)!最后保存一下!
8、开始联合仿真start simulation,就会出现asolver,弹出dos 文件,这个不管他,然后adams模型中的小球开始运动,估计会比较慢,最后会出现小球在横梁上运动而不掉下横梁!
这是我在做这个模型的过程中的一些东东,写的比较杂,呵呵!如果大家觉得好的话可以顶一下,希望能给那些在adams和simulink联合仿真而徘徊的xdjm一点启示就行了!
note:这个例子是adams/cotrol自带的,可以在example中找到!
关于下述错误,我找到一个解决方法
Error reported by S-function 'adams_plant' in 'my_ball/adams_sub/ADAMS Plant/S-Function':
error in startup Could not connect to ADAMS server
编辑myball.m文件,将第24行
ADAMS_sysdir = strcat(topdir, '');
替换为第29行
ADAMS_sysdir = '...' ;依各人配置不同,具体路径有所区别改完之后保存即可。