abb焊接机器人工作站故障的分析和维修
- 格式:doc
- 大小:120.50 KB
- 文档页数:10
ABB故障处理一、故障类型分类1、机械故障1.1 轴承故障1.2 传动系统故障1.3 机械结构故障2、电气故障2.1 电源故障2.2 控制系统故障2.3 电缆连接故障3、编程故障3.1 代码错误3.2 逻辑错误3.3 参数设置错误4、传感器故障4.1 传感器故障4.2 信号处理故障二、故障处理步骤1、问题确认1.1 收集故障现象信息1.2 确定问题出现的频率和条件1.3 检查是否有相关故障报警2、故障排查2.1 机械部分排查2.1.1 检查机械结构是否有异常 2.1.2 检查传动系统是否正常2.1.3 检查轴承是否损坏2.2 电气部分排查2.2.1 检查电源供应是否正常2.2.2 检查控制系统是否工作正常 2.2.3 检查电缆连接是否良好2.3 编程部分排查2.3.1 检查编程代码是否正确2.3.2 检查参数设置是否正确2.4 传感器部分排查2.4.1 检查传感器是否损坏2.4.2 检查传感器信号处理部分是否正常3、故障解决3.1 机械故障解决方法3.2 电气故障解决方法3.3 编程故障解决方法3.4 传感器故障解决方法4、故障预防措施4.1 定期维护保养4.2 及时更换易损件4.3 提升操作人员技能附件:故障处理记录表法律名词及注释:1、机械故障:指在运行过程中出现的机械部分的故障,包括轴承故障、传动系统故障和机械结构故障等。
2、电气故障:指在运行过程中出现的电气部分的故障,包括电源故障、控制系统故障和电缆连接故障等。
3、编程故障:指在运行过程中出现的与编程相关的故障,包括代码错误、逻辑错误和参数设置错误等。
4、传感器故障:指在运行过程中出现的传感器部分的故障,包括传感器故障和信号处理故障等。
ABB焊接机器人工作站故障的分析和维修介绍ABB焊接机器人工作站的硬件构成与软件环境,针对导致停机故障有影响的环节——控制单元,电气驱动单元,机械传动部件进行分析。
同时介绍修复交流伺服电机的具体实例。
1、引言春兰摩托车有限公司自1996年引进ABB公司的工业焊接机器人工作站,该工作站设计精良,维护率低,但由于在焊接高温,烟尘,电磁干扰等恶劣工况下,不免有故障出现,特别是电气元件的故障。
2、工作站的概况本工作站型号为IRB1400,是ABB公司工业弧焊机器人系列较小的一种。
2.1该工作站软件系统名为基装机器人焊接系统(S4M94A–IRBP–BASED WELDING SYST EMS)该操作系统可使用英文.日文等数种语言,较易掌握,使用时类似windows窗口菜单,用户界面明了友善,并有简单人机对话功能,和实时诊断错误信息系统。
2.2该工作站硬件系统分为四个部分,如图1所示。
3、故障类型的分析3.1软件造成的停机故障该工作站控制系统下的主处理器采用Motorola68040芯片,内存容量为4Mb,主处理器要负责机器人的运动参数,反馈数据的采样分析,焊接参数等运算(控制系统的关系如图2)。
在焊接运行过程中,由于主处理器工作繁忙,可能造成系统停机死机的现象,如有信息提示,可根据系统自我诊断信息进行处理;如无信息提示,可重新启动,通过操作系统的重装解决。
3.2硬件造成的停机驱动单元和电气元件,机械传动部件的关系,如图3所示。
在此模块中电气元件的故障率较高,在中小型电机中轴承故障与绝缘故障占故障的97%以上,而该工作站使用的交流伺服电机多了驱动控制线路和反馈电路(见图3),因此需对可靠性薄弱环节如轴承.绕组绝缘.驱动线路.反馈电路等进行检测。
4、具体故障实例分析和修复生产线第八号工作站(出厂编号为1996–1582)于2001年8月出现的停机故障较有代表性,该工作站在工作启动后出现停机,显示屏无信息提示,重新启动操作系统,无法解决。
机器人焊接工作站常见故障与处理机器人焊接工作站常见故障与处理处理方案第1.01 项:焊接不起弧处理方式:○1检查焊机是否打开。
○2检查水箱是否打开。
○3检查送丝是否顺畅,有无堵丝。
○4检查机器人“正常焊接”是否打开。
○5检查控制方式是否为JOB号远控。
○6检查起弧点是否导电良好。
处理方案第1.02 项:焊机不送丝处理方式:○1检查焊机是否打开。
○2检查有无堵丝。
处理方案第1.03 项:自动流程不执行处理方式:○1检查机器人是否为顺控流程。
○2检查水箱是否打开。
○3检查主操作台是否为“自动”方式。
处理方案第1.04 项:更换导电嘴处理方式:○1将机器人暂停。
○2更换导电嘴。
地址:四川成都(610300)青白江区向阳路139号○3将机器人启动。
处理方案第1.05 项:堵丝处理方式:○1将机器人暂停。
○2将堵丝的位置清除。
○3将机器人启动。
○4如遇送丝不畅,请更换送丝管、导丝管等,并检查送丝机的送丝轮,压力过小会影响送丝,压力过大会伤害焊丝表面,影响引弧稳定。
处理方案第1.06 项:暂停后启动处理方式:○1机器人运行中,按下红色“暂停”按钮后机器人暂停。
○2机器人运行中暂停后,按下绿色“启动”按钮后机器人启动。
处理方案第1.07 项:设备开机前异常检查处理方式:○1机器人在原位置,否则为异常,必须查明原因。
○2变位机在原位置,否则为异常,必须查明原因。
○3有保证本次焊接操作所需的焊丝、保护气体、冷却水,否则为异常,必须查明原因。
地址:四川成都(610300)青白江区向阳路139号○4其他事项正常,否则为异常,必须查明原因。
处理方案第1.08 项:设备开机后异常检查处理方式:○1将机器人钥匙开关置于“AUTO”档位,复位掉开机报警后,操作盒上无任何异常文字显示。
○2焊机无错误显示。
○3主控操作系统界面无异常报警显示。
○4报警蜂鸣器报警声音正常。
处理方案第1.09 项:如何正确清理焊枪焊渣处理方式:○1每次手工清理焊枪焊渣时请使用钢刷,而不能使用钳子或者螺丝刀,以免损坏分离器。
ABB工业机器人常见的24种故障及维修处理方法1.机器人报警“20252”电机温度高(DRV1故障处理)处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好λ如果査不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毀。
具体操作方式:在控制柜左下角找到A43板,找到板子上5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线将两根线从中间断开,把板子这边的两根线短接即可。
2.ABB机器人电源模块短路板短路故障处理人为因素:热插拔硬件非常危险,许多电路板故障都是热插拔引起的,带电插拨装板卡及插头时用力不当造成对接口、芯片等的损害,从而导致机器人电路板损坏;随着使用机器人时间的增长,机器人电路板上的元器件就会自然老化,从而导致机器人电路板故障。
环境因素:由于操作者的保养不当,机器人电路板上布满了灰尘,可以造成信号短路。
3.什么情况下需要为机器人进行备份1.新机器第一次上电后。
2.在做任何修改之前。
3.在完成修改之后。
4.如果工业机器人重要,定期1周一次。
5.最好在U盘也做备份。
6.太旧的备份定期删除,腾出硬盘空间。
4、什么情况下需要为工业机器人进行备份上述情况是示教器和机器人主控制器之间没有建立通讯连接,未建立连接的原因包括:1.机器人主机故障。
2.机器人主机内置的cf卡(sd卡)故障。
3.示教器到主机之间的网线松动等。
处理方式:1.检查主机是否正常,检查主机内sd卡是否正常。
2.检查示教器到主机网线是否连接正常。
5.机器人出现报警提示信息10106(维修时间提醒是什么意思?)不能。
比如说机器人甲A的备份只能用于机器人甲,不能用于机器人乙或丙,因为这样会造成系统故障。
8.对于机器人备份中什么文件可以共享?机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。
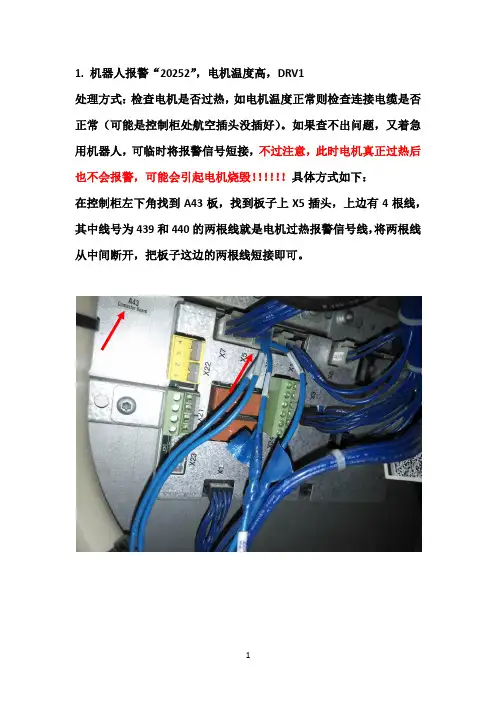
1.机器人报警“20252”,电机温度高,DRV1处理方式:检查电机是否过热,如电机温度正常则检查连接电缆是否正常(可能是控制柜处航空插头没插好)。
如果查不出问题,又着急用机器人,可临时将报警信号短接,不过注意,此时电机真正过热后也不会报警,可能会引起电机烧毁!!!!!!具体方式如下:在控制柜左下角找到A43板,找到板子上X5插头,上边有4根线,其中线号为439和440的两根线就是电机过热报警信号线,将两根线从中间断开,把板子这边的两根线短接即可。
2. 检查工控机主板是否正常的方法:工控机上有3个LED 灯,如下图所示1号灯为电源指示灯,只要电源打到开位此灯就常亮,如此灯不亮则检查工控机电源是否正常。
2号灯为开机程序引导指示灯,开机过程中闪烁,开机完成后灯灭。
开机程序保存在存储卡中,如开机过程中此灯不闪烁,则可能是存储卡故障。
1 2 3存储卡3号灯为主板状态指示灯,开机过程中先是红灯闪烁,后变为绿灯闪烁,最后绿灯常亮,如果此灯最后显示红色或者不亮,则主板有问题,如果按上述过程依次点亮,则证明主板是正常的。
3.如果机器人系统异常或崩溃,可先尝试用“B启动”重新启动,即可恢复到最近的正产状态。
具体方法如下:点击示教器右上角ABB图标,点击重新启动4.机器人I/O状态都丢失,检查控制柜中I/O板,在控制柜柜门的右下角,检查板子上的指示灯是否点亮,如果灯都不亮则检查I/O 板的电源和电源的保险(如下红色箭头所示),如果只是个别I/O 丢失,则查看板子上对应的接线端子,看线是否松动。
5.如果一垛铝锭抓取完了,机器人还继续往下抓,检查轨道末端的光电眼,看其是不是没有对正对侧的反光板,或者是光电眼损坏。
6.如果机器人在自动运行过程中突然不动了,需要查看示教器上显示的程序运行位置,看是否在等待某一I/O信号,然后检查相应的信号源是否正常。
7.如果外部急停按钮都已经解开而机器人一直报紧急停止,则检查控制柜右侧壁右上角的板子(panel board),X1端子的3、4号端子控制机器人的紧急停止,如果3、4号端子之间的连线断开,机器人就报紧急停止。
焊接机器人工作中易出现的问题和解决方法随着工业化的不断发展,焊接机器人在生产中的应用越来越广泛。
焊接机器人具有高效、精准、稳定等优点,大大提高了生产效率和产品质量。
但是,焊接机器人在工作中也会遇到一些问题,如何解决这些问题是我们需要关注的。
一、焊接机器人工作中易出现的问题1.焊接质量不稳定焊接机器人在工作中,焊接质量不稳定是一个常见的问题。
主要表现为焊接接头的质量不同,焊接缝的尺寸不一致等。
这是由于焊接机器人在工作中,焊接参数不稳定,焊接速度不一致等原因导致的。
2.焊接位置不准确焊接机器人在工作中,焊接位置不准确也是一个常见的问题。
主要表现为焊接位置偏差较大,焊接位置不稳定等。
这是由于焊接机器人在工作中,焊接位置控制不精确,机器人运动轨迹不准确等原因导致的。
3.焊接机器人故障频繁焊接机器人在工作中,故障频繁也是一个常见的问题。
主要表现为机器人运动不稳定,焊接头部撞击等。
这是由于焊接机器人在工作中,机械部件损坏,控制系统故障等原因导致的。
二、焊接机器人工作中的解决方法1.焊接质量不稳定的解决方法焊接机器人在工作中,焊接质量不稳定的解决方法主要有以下几种:(1)选择合适的焊接参数,如焊接电流、焊接速度等,保证焊接质量稳定。
(2)焊接机器人在工作中,焊接速度不一致,可以通过调整机器人速度,保证焊接速度稳定。
(3)定期维护焊接机器人,保证焊接机器人的正常运转,减少故障发生的可能性。
2.焊接位置不准确的解决方法焊接机器人在工作中,焊接位置不准确的解决方法主要有以下几种:(1)通过调整机器人的控制系统,保证焊接位置的控制精度。
(2)加强焊接机器人的维护,保证机器人运动轨迹的准确性。
(3)通过加强机器人的定位系统,保证焊接位置的准确性。
3.焊接机器人故障频繁的解决方法焊接机器人在工作中,故障频繁的解决方法主要有以下几种:(1)定期检查机器人的机械部件,保证机器人的正常运转。
(2)加强机器人的维护,定期更换机器人的易损件,保证机器人的正常运转。
焊接机器人工作中易出现的问题和解决方法随着科技的飞速发展,焊接机器人已经逐渐取代了传统的手工焊接,成为了现代化生产中不可或缺的一环。
然而,在焊接机器人工作中,往往会出现一些问题,这些问题不仅会影响生产效率,还可能会导致安全事故的发生。
因此,本文将从焊接机器人工作中容易出现的问题和解决方法两个方面进行探讨。
一、焊接机器人工作中容易出现的问题1. 机器人操作不稳定机器人操作不稳定是焊接机器人工作中常见的问题之一。
这种情况往往是由于机器人本身的质量问题或者机器人在工作过程中受到外力干扰所导致的。
操作不稳定会导致焊接质量不稳定,焊接接头质量不达标。
2. 焊接接头质量不达标焊接接头质量不达标是焊接机器人工作中比较严重的问题之一。
这种情况往往是由于焊接机器人操作不当或者焊接工艺不规范所导致的。
焊接接头质量不达标会导致焊接接头强度不足,容易出现断裂现象。
3. 焊接机器人故障焊接机器人故障是焊接机器人工作中比较常见的问题之一。
这种情况往往是由于机器人本身的故障或者机器人在工作过程中受到外力干扰所导致的。
焊接机器人故障会导致生产效率降低,增加维修费用。
4. 焊接机器人安全事故焊接机器人安全事故是焊接机器人工作中最严重的问题之一。
这种情况往往是由于机器人操作不当或者机器人本身存在安全隐患所导致的。
焊接机器人安全事故会导致人员受伤,设备损坏,甚至会导致生产停工。
二、焊接机器人工作中的解决方法1. 机器人操作不稳定的解决方法机器人操作不稳定的解决方法主要是通过对机器人进行调试和维护来解决。
首先,要对机器人进行全面的检查,确保机器人各部件的连接牢固,没有松动。
其次,要对机器人进行调试,保证机器人的运行稳定。
最后,要对机器人进行定期的维护,保持机器人的良好状态。
2. 焊接接头质量不达标的解决方法焊接接头质量不达标的解决方法主要是通过优化焊接工艺来解决。
首先,要选择合适的焊接工艺参数,保证焊接接头的质量。
其次,要对焊接接头进行全面的检查,确保焊接接头的质量符合标准。

23中国设备工程 2020.11 (下)中国设备工程C h i n a P l a n t E n g i n e e r i ng1 机器人技术概述伺服电机安装在机器人主体中。
主机和伺服模块是IRC5控制器的两个关键部分。
主机包括主板和存储设备,主机完成对机器人功能的控制。
驱动模块从主机接收命令以控制伺服电机的操作,然后机器人主体完成各种任务。
所有机器人软件都安装在CF 卡上,包括系统软件和应用程序软件。
系统软件主要由引导系统(引导程序)和Windows 操作系统组成。
Windows 操作系统是用于执行和操作整个机器人系统的平台。
系统启动时,数据将从CF 卡的内存加载到主板的RAM 中。
CF 卡存储器安装在主机背面的左下角。
示教盒和IRC5控制器是ABB 工业机器人控制系统的核心。
学习挂件用于处理与机器人系统的操作有关的许多功能(程序执行,滚动控制和机器人程序的修改)。
示教器本身也是一台完整的计算机,通过集成的电缆和连接器连接到IRC5控制器。
IRC5控制器主要由操作面板,主机,电源模块,整流器模块,I/O 模块和伺服模块组成。
IRC5控制器包含移动和控制机器人的所有必需功能。
2 ABB 工业机器人控制系统功能机器人控制系统的结构主要包括:一是主从控制。
主从控制是机器人技术的重要特征。
例如,弧焊机器人使用主从控制方法进行操作。
我使用两台计算机。
一台计算机是整个机器人系统的管理员,另一台计算机控制所有关节。
地方价值控制;二是集中控制。
集中控制属于原始的机器人控制结构,对计算机有更高的要求。
集中控制可以降低公司的生产成本,但是由于运行效率低和故障率高,这种方法逐渐淘汰了现代工业,而第三种方法是分布式控制。
分布式控制是一种广泛使用的方法,主要使用主控制计算机将整个机器人系统分为两个级别,主要是有效地管理整个主系统。
而且下一级模块具有很多CPU 。
每个板均由处理器控制。
3 机器人技术控制系统软件架构3.1 操作系统要控制机械手系统,操作系统是关键。
ABB机器⼈故障处理指南ABB⼯业机器⼈常见故障处理1. 开机⽰教器显⽰如下1)如果机器⼈开机,⽰教器⼀直显⽰connecting to the robot controller,如上图(robotware 版本是⽩⾊界⾯,提⽰关键字⼀样),如何处理?2)上述情况是⽰教器和机器⼈主控制器之间没有建⽴通讯连接3)未建⽴连接的原因包括:a) 机器⼈主机故障b) 机器⼈主机内置的cf卡(sd卡)故障c) ⽰教器到主机之间的⽹线松动等4)如何处理?a) 检查主机是否正常,检查主机内sd卡是否正常?5.15版本的主机是cf卡,在下述位置5.61以上版本(包括robotware6版本)的主机是sd卡,在下述主机右侧b) 检查⽰教器到主机⽹线是否连接正常?⽰教器到主机上的⽹⼝均为主机绿⾊标签⽹⼝2. 50296 smb内存差异处理⽅法:以上为更换了SMB后,由于SMB内数据和控制柜内数据不⼀致导致1)点击ABB,校准,点击SMB内存2)选择⾼级3)选择清除SMB(由于更换了SMB,如果更换了控制器卡,则选择清除控制柜内存)4)点击“关闭”后选择“更新”5)选择替换SMB电路板6)最后重新更新转数计数器即可3. 20032转数计数器未更新处理⽅法:1)⼿动移动机器⼈⾄各轴刻度线(现场如果不能同时到零刻度线,可以⼀个轴⼀个轴来)2)点击ABB,校准,点击更新转数计数器3)根据实际点击更新(更新时,⽰教器不⽤Enable)4. 38103 与SMB的通信中断处理⽅法:检查机器⼈控制柜下⽅的x2到机器⼈本体的smb线是否接好5. 50057关节未同步处理⽅法:1)此故障多数由于未正确关机导致。
2)点击重启,选择⾼级,选择B启动,机器⼈将恢复到最近的⽆措状态6. 正确关机⽅式正确关机⽅式不是直接断电,⽽是进⼊ABB,重新启动,选择⾼级,选择关机7. 20252 电机温度⾼处理⽅法:1)本体6个电机温控线为串联,最后接⼊接触器板(柜内左侧的A43)的x5阵脚2)可能某个轴温度过⾼,导致热敏电阻断开,可以打开电机盖板检查3)如果电机不热或者温控线断开,也可暂时短接A43接触器版的x5的1和28. 34316 电机电流错误处理⽅法:上述问题为驱动到对应电机的动⼒线未正确连接,(上图表⽰4轴)可检查驱动对应轴到电机的连线A41为驱动,X11为1轴输出,X12为2轴输出,X13为3轴输出,X14为4轴输出,X15为5轴输出,X16为6轴输出,9. 37001 电机开启接触器错误处理⽅法:1)此项表⽰接触器动作故障。
焊接机器人的常见故障及解决办法随着科技的发展,焊接机器人在现代工业生产中得到广泛应用。
然而,就像其他机械设备一样,焊接机器人也会出现一些故障。
本文将介绍焊接机器人的常见故障,并提供相应的解决办法,以帮助工程师和技术人员更好地维护和修复焊接机器人。
一、电源问题电源是焊接机器人正常运行的基础,常见的电源问题包括电压波动、电流不稳定等。
解决办法是首先检查供电电源的电压,确保电压稳定。
其次,检查电源线路是否有松动或接触不良的情况,并进行修复。
对于电压波动较大的场合,可以考虑采用稳压器或者UPS来保护焊接机器人。
二、传感器故障焊接机器人中的传感器起到了关键的作用,用于检测焊接过程中的位置、力度等参数,以确保焊接质量。
常见的传感器故障包括传感器信号不稳定、传感器失灵等。
解决方法是首先检查传感器与控制系统之间的连接,确保连接良好。
其次,检查传感器是否被污染或损坏,如果是,及时进行清洁或更换。
三、机械部件故障焊接机器人的机械部件包括焊枪、焊丝喂送机构等,常见的故障有焊枪堵塞、焊丝喂送不畅等。
针对焊枪堵塞问题,可以使用专门的清洁剂进行清洗。
对于焊丝喂送不畅的情况,可以检查焊丝喂送机构是否有堵塞或者刮花,及时进行修复或更换。
此外,定期对机械部件进行润滑和维护也是预防机械故障的有效措施。
四、程序设置问题焊接机器人的程序设置对于焊接质量和效率起到至关重要的作用。
常见的程序设置问题包括焊接参数错误、路径规划错误等。
解决办法是仔细检查程序设置,确保焊接参数和路径规划的准确性。
对于复杂的焊接任务,可以利用仿真软件进行验证,减少程序设置错误的可能性。
五、安全问题在焊接机器人的运行过程中,安全问题是非常重要的。
常见的安全问题包括防护措施不完备、操作不当等。
为了确保焊接机器人的安全运行,应该加强安全培训,提高操作人员的安全意识,同时安装必要的安全设施,如安全光幕、急停按钮等。
综上所述,焊接机器人的常见故障包括电源问题、传感器故障、机械部件故障、程序设置问题和安全问题。
ABB工业机器人控制系统故障分析及排除方法摘要:近年来,我国的工业化进程有了很大进展,工业机器人的应用也越来越广泛。
本文以ABB工业机器人为例,首先对机器人技术进行了概述,在掌握ABB工业机器人控制系统功能的基础上,总结归纳ABB工业机器人控制系统常见故障的发生原因及排除方法。
重点分析研究特殊故障的排除方法,创新机器人维修思路。
关键词:ABB工业机器人;控制系统;故障分析;排除方法引言该课题经过建立独立的工作坐标系,通过以太网构成数据通信网络,通过工业机器人来完成轨迹的计算和跟踪,对研究机器人的运动控制系统具有比较好的指导意义。
1机器人技术的概述机器人技术的控制系统结构主要包括:一是主从式控制。
主从式控制是机器人技术的显著特征,例如弧焊机器人就是通过主从式控制方式实现作业,其利用2台计算机,一台计算机是整个机器人系统的管理者,另一台则实现对所有关节位置数值的控制;二是集中控制。
集中控制属于较早的机器人控制结构,其对计算机的要求比较高。
虽然集中控制能够降低企业生产成本,但是其运行效率比较慢,故障发生率较高,因此此种方式在现代工业领域中已经逐渐被淘汰;三是分布式控制。
分布式控制是目前所广泛采取的一种方式,其主要是将机器人整个系统分为两级,有效运用上一级主控计算机实现对所有系统的管理,下一级的模块中则具有很多CPU,每一个关节都由一个处理器进行控制。
2ABB工业机器人控制系统功能伺服电机安装于机器人本体上。
ABB工业机器人控制系统的核心部分包括示教器和IRC5控制器。
示教器用于处理与机器人系统操作相关的许多功能:运行程序、微动控制、修改机器人程序等。
示教器本身也是一个完整的计算机,通过集成电缆和连接器与IRC5控制器连接。
IRC5控制器主要由操作面板、主计算机、电源模块、整流模块、I/O模块及伺服模块等组成。
IRC5控制器包含移动和控制机器人的所有必要功能。
其中主计算机和伺服模块是IRC5控制器的两个关键部分。
焊接机器人工作中易出现的问题和解决方法随着现代工业的发展,焊接机器人已经成为了生产线上不可或缺的一部分。
然而,在焊接机器人的工作过程中,也会出现一些问题,这些问题可能会影响生产效率,甚至会导致产品质量下降。
本文将介绍焊接机器人工作中易出现的问题和解决方法。
一、焊接机器人的运动控制问题1. 机器人运动不稳定机器人运动不稳定的原因可能是机器人的控制系统出现问题或者机械部件出现磨损。
解决方法是检查机器人的控制系统和机械部件,及时更换损坏的零部件。
2. 机器人运动速度过慢或过快机器人运动速度过慢或过快可能会影响焊接质量和生产效率。
解决方法是调整机器人的速度参数,使其适应焊接工艺和生产要求。
3. 机器人运动轨迹偏差机器人运动轨迹偏差可能会导致焊缝不平整,影响焊接质量。
解决方法是检查机器人的传感器和控制系统,确保机器人能够准确地按照预设的轨迹运动。
二、焊接机器人的焊接问题1. 焊接质量不稳定焊接质量不稳定可能是由于焊接参数设置不当或者焊接材料不合适。
解决方法是调整焊接参数,选用合适的焊接材料,确保焊接质量稳定。
2. 焊接接头开裂焊接接头开裂可能是由于焊接过程中产生的应力过大或者焊接材料质量不好。
解决方法是优化焊接工艺,减少焊接过程中的应力,选用质量好的焊接材料。
3. 焊接变形严重焊接变形严重可能会影响产品的外观和尺寸精度。
解决方法是优化焊接工艺,减少焊接过程中的应力,采用预热和冷却措施,控制焊接温度和时间。
三、焊接机器人的安全问题1. 机器人碰撞机器人碰撞可能会导致机器人损坏,甚至会对人员造成伤害。
解决方法是设置机器人的安全围栏和安全传感器,确保机器人在工作过程中不会碰撞到其他物体或人员。
2. 焊接过程中产生的有害气体焊接过程中产生的有害气体可能会对人员造成危害。
解决方法是设置焊接通风系统,确保焊接过程中的有害气体得到有效排放。
3. 机器人控制系统故障机器人控制系统故障可能会导致机器人失控,对人员造成伤害。
焊接机器人常见机械故障原因及解决措施
焊接机器人常见机械故障原因及解决措施如下:
1. 机器人轴承磨损或损坏:清洁轴承,更换轴承,检查轴承外部损坏并修复。
2. 机器人关节位置漂移:修正轴偏差,重建电流表,更换伺服电机,更换伺服控制器。
3. 机器人装配松动:零部件变形,松动,损坏:重新拧紧螺钉或更换受损部分。
4. 机器人逆向运动:检查电机发生器,更换电容器或电机器。
检查机器人的光栅现象,可能需要调整机器人轨迹。
5. 电缆和检测系统故障:检查故障电缆,更换故障元件,并校准机器人传感器。
6. 程序或控制系统故障:检查软件并执行必要的修复,重新校准机器人系统,重新编程。
ABB焊接机器人工作站故障的分析和维修介绍ABB焊接机器人工作站的硬件构成与软件环境,针对导致停机故障有影响的环节——控制单元,电气驱动单元,机械传动部件进行分析。
同时介绍修复交流伺服电机的具体实例。
1、引言春兰摩托车有限公司自1996年引进ABB公司的工业焊接机器人工作站,该工作站设计精良,维护率低,但由于在焊接高温,烟尘,电磁干扰等恶劣工况下,不免有故障出现,特别是电气元件的故障。
2、工作站的概况本工作站型号为IRB1400,是ABB公司工业弧焊机器人系列较小的一种。
2.1该工作站软件系统名为基装机器人焊接系统(S4M94A–IRBP–BASED WELDING SYST EMS)该操作系统可使用英文.日文等数种语言,较易掌握,使用时类似windows窗口菜单,用户界面明了友善,并有简单人机对话功能,和实时诊断错误信息系统。
2.2该工作站硬件系统分为四个部分,如图1所示。
3、故障类型的分析3.1软件造成的停机故障该工作站控制系统下的主处理器采用Motorola68040芯片,内存容量为4Mb,主处理器要负责机器人的运动参数,反馈数据的采样分析,焊接参数等运算(控制系统的关系如图2)。
在焊接运行过程中,由于主处理器工作繁忙,可能造成系统停机死机的现象,如有信息提示,可根据系统自我诊断信息进行处理;如无信息提示,可重新启动,通过操作系统的重装解决。
3.2硬件造成的停机驱动单元和电气元件,机械传动部件的关系,如图3所示。
在此模块中电气元件的故障率较高,在中小型电机中轴承故障与绝缘故障占故障的97%以上,而该工作站使用的交流伺服电机多了驱动控制线路和反馈电路(见图3),因此需对可靠性薄弱环节如轴承.绕组绝缘.驱动线路.反馈电路等进行检测。
4、具体故障实例分析和修复生产线第八号工作站(出厂编号为1996–1582)于2001年8月出现的停机故障较有代表性,该工作站在工作启动后出现停机,显示屏无信息提示,重新启动操作系统,无法解决。
进行硬件分析,首先利用工作站自身硬件测试固化程序检测,检测结果是驱动单元完好,但机械手臂(变位器)的交流伺服电机不能工作,利用本文3.2节分析,测量出电机绕组短路。
5、修复后的性能测试上表显示修理后的性能数据与标准数据基本相同,转速差异与安装精度有关。
经过一年使用后,该工作站基本达到完好设备的要求。
6、本文4中修复故障实例所产生的经济效益由于该工作站为进口设备,维修费用高并且涉及产品技术秘密,此实例中电机购入价格为48,000元,人工费12,000元,总计60,000元,而此次修复成本材料费用仅为1000元左右,同时为今后维修进口机电产品提供了实例,对打破进口机电产品的技术壁垒起到无法估量的作用。
-------- 欢迎下载资料,下面是附带送个人简历资料用不了的话可以自己编辑删除,谢谢!下面黄颜色背景资料下载后可以编辑删除X X X 个人简历个人资料姓名:婚姻状况:未婚出生:政治面貌:团员性别:民族:汉学位:移动电话:专业:电子邮件:地址:教育背景2006.9-2010.6 吉林工程技术师范学院-----外国语言文学系主修课程大学英语精读,大学英语泛读,英语口语,英语听力,英语写作,英语口译,翻译学,词汇学,语法学,英美概况,英国文学,美国文学,语言学,日语,中外名胜。
能力及特长这要写你明你有什么样的能力及经验,最重要就是告诉用人单位,你会做什么?计算机能力能熟悉使用Office工具以及Photoshop、Flash等软件。
获国家计算机二级等级资格证书。
外语水平通过英语专业四级考试,能熟练进行听说读写译。
奖励情况2007-2008 优秀学生会干部 2008/07 师生合唱比赛一等奖普通话水平测试等级证书英语专业四级证书实习经验(或实践经验或兼职经验)这里写上你的实习经验或实践经验或兼职经验等信息吧,标题自己起一个贴切的。
自我评价本人性格开朗、稳重、有活力,待人热情、真诚。
工作认真负责,积极主动,能吃苦耐劳。
有较强的组织能力、实际动手能力和团体协作精神,能迅速的适应各种环境,并融入其中。
我不是最优秀的,但我是最用功的;我不是太显眼,但我很踏实;希望我的努力可以让您满意。
这里不要照抄哦,不会写自我评价的朋友,你可以访问http 这里有很多自我评价范文可以参考。
(按住键盘的CTRL键,再用鼠标点链接就可以直接打开网站,不用复制到浏览器的。
)本人性格热情开朗、待人真诚,善于沟通,应变能力较强。
懂得珍惜拥有的一切。
B内张型鼓式制动器C湿式多片制动器D浮钳盘式制动器289.零配件市场上的主要价格形式(ABC)A厂家指导价B市场零售价C配件厂价格290.油漆出险桔皮皱,即表面不光滑,可能的原因(D )A涂装间通风国强B稀释剂干燥速度过快C稀释剂干燥速度过快慢D一次喷涂过厚291.汽车的动力性能包括(ACD)A最高车速B平均车速C加速时间D能爬上的最大坡度292.《车险定损核价运作规范》规定事故车辆修复费用包括(ABCD)A事故损失部分维修工时B事故损失部分需更换的配件费C残值D税费293.车辆全损或推定全损案件,在确定损失前,应该了解(ABD)汽车信息A了解车辆购置时间、价格B取得车辆的购置发票或其他证明C了解车辆的购置渠道D了解车辆的所有人294.机动车电器故障引起火灾的主要原因有(BC)A电瓶故障B线路故障C电器元件故障D日光聚集295. 《车险定损核价运作规范》规定对残值处理的原则(AB)B A所有残值归被保险人所有,保险人在维修费中扣除B事故车辆更换的配件由保险人收回后不计入残值之内C所有配件必须折旧卖给被保险人D所有配件必须折旧卖给维修厂或废品收购站296.从火灾原因调查的角度,汽车火灾的原因分(ABCD)A机械故障类(如发动机过热)B电器类(线路老化短路)C人为类(纵火)D交通事故类(碰撞、倾覆、货物引起)297.对汽车整车进行测量非常重要的平面(D)?A基本面B中心面C零平面D下平面298.机械配件的基本维修原则(ABCD)A超过配合尺寸,通过加工也无法得到装配技术要求B变形通过矫正无法保证使用性能和安全技术要求C断裂无法焊接或焊接后无法保证使用性能和安全技术要求D转向等涉及到安全的所有发生变形的配件299.被保险人可依据哪些有效证明作为领取赔款的凭证(A)AC A居民身份证B有效驾驶本C户口薄300..驾驶员未取得驾驶资格包括哪些情况(ABCD)ABCA无驾驶证B驾驶车辆与准驾车型不符C公安交关部门规定的其他属于非有效驾驶的情况D驾驶证丢失301.车险网上理赔系统录入的要求有哪些(ABCDE)A查勘时间照片最佳大小为60-80kB扫描仪设置方档最佳大小100-150kC索赔申请书应当由当事驾驶员在第一时间亲笔填写D车损照片的拍摄必须符合《车险定损核价运作规范》的相关规定E驾驶证,行驶证应尽量在查勘环节第一时间采取原件拍摄判断题1. 185/65R14,其中R代表Radial:表达轮胎纹络为放射状的又称“子午线”(√)2. 检查安全气囊系统故障时,必须先拆下蓄电池负极,再使用仪器读出故障代码。
(×)3. 路面附着性能越好,汽车抗热衰退性能越好。
()4. 废气再循环的作用是减少HC、CO和NOX的排放量(×)5. 机动车辆保险条款(2005版)中,保险车辆发生事故,应当由第三者负责赔偿但确实无法找到第三者的,赔偿处理时实行30%绝对免赔率(×)6. 受害人无固定收入的,按照其最近二年的平均收入计算;(×)7. 营运机动车在规定检验期限内经安全技术检验合格的,不再重复进行安全技术检验(√)8. 本公司与被保险人就赔款金额协商确定并赔偿结案后,受害人又就同一事故向被保险人提出赔偿请求的,本公司可二次追加赔付(×)9. 维修车辆竣工结帐后,驾驶员驾驶车辆从修理厂开出时与一辆车辆相撞,因碰撞地点还在修理厂内,我司不负赔偿责任.(×)10. 机动车辆保险条款(2005版)基本险有四个独立险种(×)11.用于支付公安交管部门逃逸案件处理费用的特殊案件可视金额参照本机构核赔权限进行审核()12.四冲程发动机的做工冲程中,曲轴带动活塞从上支点向下至点运动,此时进气门关闭(√)13.当汽车在一般条件下行使时,应选用双速主减速器中的高速档,而在行使条件较差时,则采用低速档(√)14.评价汽车制动性的指标制动效能、制动效能的恒定值、制动时的方向稳定性(×)15.热塑性材料件损伤以修复为主,热固性塑性件损伤需更换(√)16.投保人对投保标的具有保险利益,不具有保险利益的,保险合同无效(√)17. 《道路交通安全法实施条例》有关高速公路应当标明车道行使速度,最高120公里\小时,最低70公里\小时(×)18.暴风指风速28.5米/以上的大风(√)19.刚性万向节是靠零件的铰链式联结来传递动力的,而挠性万向节则是靠弹性零件来传递动力的(√)20.查勘案件查勘完毕后,只能点击发送按钮发送案件,不能通过点击申请核价或申请核损按钮直接到达目的平台(×)21.双片离合器中间压盘的前后,都需设有限位装置(√)22.各种车身的修复,都不要使用测量工具测量车身尺度(×)23附加险条款与基本险条款相抵触之处,以附加险为准,未尽之处,以基本险为准(√)24.保险车辆因路面不平导致两个以上车辆轮胎磨损严重后破裂,轮胎的损失我司不负责赔偿(√)25.李某于2006年4月1日向我司投保一辆奥迪A6汽车,于同年10月30日于一摩托车发生双方事故,经交警裁定李某为主要责任,对于该事故作为核赔人在审核时首先核对三者方的承保情况。
(√)26.汽车转弯时,转弯半径越大车速越小,附着系数越小,中心位置越高,其操作稳定性越好。
(×)27.应当有交强险赔偿的损失和费用,如交强险未赔付,商业三者险也可赔付(×)28. 一张照片已能反映出多个部件、部位受损真实情况的不需要单个或重复拍摄,重大配件或价格较贵的配件同样如此,不必单独牌照(×)29.书面委托代理的授权委托书应当载明代理人的姓名或者名称、代理事项、权限和期间,并由委托人签字或盖章。
(√)30.气缸盖衬垫俗称汽缸床(√)31.轿车一般采用边梁式车架(×)32.汽车实际价指投保车辆在保险合同签订地的市场价格(×)33.四冲程发动机的作功冲程中曲轴带动活塞从上止点向下止点运动,此时,进排气门关闭(√)34. 公民下落不明满三年的,利害关系人可以向人民法院申请宣告他为失踪(×)35.在道路上发生交通事故,车辆驾驶人应立即停车,保户现场,因抢救应标明位置(√)36.保险车辆发生多次事故,累计赔付金额时,保单合同自动终止(×)37.本公司与被保险人就赔偿金额协商确定并赔偿结案后,受害人又就同一事故向被保险人提出赔偿请求,本公司可以追加赔付(×)38.车辆停放过程中突然遭受洪水侵袭,紧会造成电器部分及线路损坏,可给予一定的清洁费用(×)39.本车上的财产损失属于标的商业三者险的理赔范围(×)40.承保年度单均赔款=(统计期间该承保年度所有保单项下已决赔款+未决赔款)/统计期间该承保年度承保数量。