TLD算法原理及应用实例
- 格式:ppt
- 大小:1.19 MB
- 文档页数:21

TLD目标跟踪算法一、算法的背景TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生Zdenek出的一种新的单目标长时间(long term tracking)跟踪算法。
该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。
同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。
对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。
但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。
传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。
但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。
该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。
即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。
这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。
换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。
考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。
简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。
TLD目标跟踪算法TLD(Track Learning Detection)是一种目标跟踪算法,它结合了目标跟踪和目标检测的方法,能够在复杂环境中跟踪目标并检测目标的丢失。
TLD算法的核心思想是结合在线学习和离线学习的方法,通过检测器(detector)来检测目标,并通过跟踪器(tracker)来跟踪目标。
在在线学习阶段,检测器会进行训练,学习目标的外观特征和形状信息。
而在跟踪阶段,跟踪器会根据检测器的输出来进行目标的跟踪,同时根据跟踪结果反馈给检测器,进行修正。
TLD算法的具体步骤如下:1. 首先,通过一个强分类器进行目标检测。
这个强分类器使用了Haar特征和Adaboost算法进行训练,能够在图像中快速定位目标。
2.检测到目标后,根据目标的位置和尺度信息,将目标裁剪出来作为正样本,并提取其外观特征,包括颜色、纹理等。
3.同时,从目标附近随机选择一些负样本,并提取其外观特征。
这些负样本一般是与目标外观相似的背景区域。
4. 然后,使用一个在线集成学习器(Online Ensemble Learning)来学习目标的外观特征。
这个学习器使用了随机决策的方法,通过多个弱分类器的投票来进行目标的分类。
5.在跟踪阶段,通过跟踪器来进行目标的跟踪。
跟踪器使用了一个模板,通过计算目标与模板的相似度来判断目标的位置。
6.如果跟踪器发生目标丢失,即目标与模板的相似度低于一个阈值,那么就需要重新进行目标检测。
7.在进行目标检测时,使用之前训练得到的检测器,来对图像进行目标检测。
同时,根据跟踪器的输出结果,对检测器进行修正,从而提高检测的准确率。
TLD算法的优点是能够在复杂环境中进行目标跟踪,并且能够适应目标的外观变化。
它通过结合目标检测和目标跟踪的方法,能够在目标丢失时及时进行目标检测,从而提高了跟踪的准确率和稳定性。
然而,TLD算法也有一些缺点。
首先,由于在跟踪阶段是基于目标检测结果来进行跟踪的,所以在目标遮挡或者快速移动时容易出现跟踪失败。
塔式起重机机器视觉监控系统摘要:为解决各类建筑施工现场塔机运行过程中的安全问题,设计了一套基于视觉传感技术的智能视频监控系统。
根据实际需要,在嵌入式平台上配合图像传感器和视觉跟踪TLD算法,实现了对塔机吊臂运动轨迹的追踪定位、判断和预警。
测试结果表明:系统的检测率和正确率均能达到95 %以上。
关键词:塔式起重机;机器视觉;TLD算法;图像传感器引言塔式起重机存在着碰撞等一系列安全隐患。
鉴于塔机使用的普遍性以及潜在的事故可能性,国外学者做出了许多相关研究,塔机区域控制和防碰撞系统也相继出现:新加坡的TAC-3000塔机防碰撞、区域保护系统通过32位CPU实现了128 bit的数据加密算法,用于实现塔机之间的数据无线交互;日本大林组开发了基于GPS传感器的3台塔机防碰撞系统;德国的Liebherr、法国的Potain等公司也通过引入激光、超声等先进传感器技术实现了对塔机运行状态更加精确的测量。
国内产品大多基于传统传感设备或安装复杂,或功能简单、智能化不足,基于计算机视觉、图像传感器测量技术的快速发展,本文提出了一种基于视觉传感技术的安全监控系统,为塔机吊臂的运行范围划定一片“安全区域”,即“电子围栏”,通过在嵌入式平台上运行TLD视觉跟踪算法,对图像传感器采集到的视频、图形的关键信息进行分析处理,实现对塔臂运动轨迹的追踪定位、判断和预警,保障塔机安全作业的顺利进行。
1 系统概述1.1 系统总体框架设计系统总体框架如图1,其中:1)图像采集模块:负责采集塔机视频画面,输入至运算处理模块;2)运算处理模块:进行机器视觉智能算法识别运算和处理;3)用户界面:经运算处理模块识别和处理的数据输出并呈现给用户,同时该模块也负责接受用户输入;4)软件部分又包括任务管理和线程管理等环节。
1.2 系统功能模块传统的视频监控系统均是基于PC或服务器平台,在本设计中,结合其应用现场性强的特点,提出了嵌入式塔机智能视频监控平台,将显示和控制部分用嵌入式软硬件的方式实现,并包含智能机器视觉的模块,形成一套“智能黑盒子”迷你系统。
TLD管理的流程及实例分析企业实施D/TLD管理的流程及实例分析引言随着中国汽车行业一系列法律、法规的颁布和实施,给汽车制造商及其供应商的质量管理工作带来巨大压力的同时,也带来进一步完善质量管理的机遇。
对于汽车制造厂商来说,生产的汽车必须满足法律、法规的强制要求。
为了促使供应商采取足够的措施来保证产品质量,以避免损害(如禁止销售、违约罚款),大众汽车集团从法律框架出发,将相关要求细化、扩展至生命攸关的零部件上。
即汽车制造厂商的供应商也需要提供相关的证据资料,以避免供应商和汽车制造厂商因自身过失责任(产品责任)而造成的损害。
1 D/TLD管理要求1.1 相关概念“D”是德文存档责任件(Dokumentationspfli-cht)的第一个字母。
D/TLD零件:有存档责任的零件,如座椅、安全带和轮胎等。
D特性:有存档责任的特性,如扭矩、阻燃性和透光率等。
D特性的本质是特殊特性,包括涉及满足法律法规要求的、影响安全的产品特性(如前挡风玻璃透光率),以及相关制造过程参数(如座椅骨架座盆和靠背螺栓连接拧紧扭矩)。
D特性来源一方面是由顾客指定的产品特性和过程特性,包括政府法规和安全特性,另一方面是供应商根据长期对产品开发和生产积累的丰富经验,识别和挑选出来的产品特性和过程特性。
1.2 管理要求D/TLD管理是大众汽车集团对供应商质量管理的重要要求。
在发生损害情况和/或大众汽车集团要求下,供应商必须证明自己在防止产品出现缺陷方面已采取了足够的措施。
大众汽车集团要求供应商对其生产的每一个D/TLD零件,进行系统化的证据资料存档管理工作。
主要要求如下:(1)供应商必须确保存档资料涵盖所有D/TLD零部件和所有D 特性。
(2)供应商有义务根据自身对产品开发和生产过程中积累的丰富经验,主动识别和列举出在大众汽车集团要求以外的D/TLD零件及D特性。
(3)供应商D/TLD资料至少存档15年,且大众汽车集团保留随时审查的权利。
第16卷第3期(总第93期)辐射防护通讯1996年6月・综 述・中子反照率个人剂量计李景云(中国原子能科学研究院,北京,102413)1 引言前面的文章〔1〕已对中子个人剂量监测做了较全面的介绍。
从发展的观点看,作为记录个人剂量计,热释光/径迹蚀刻(T LD/T ED)组合剂量计或带辐射体的径迹蚀刻剂量计有着明显的优势。
气泡剂量计以其灵敏度高也很具吸引力。
但是反照率个人剂量计由于发展比较成熟还是广泛的应用着。
实际上,这方面的研究也在继续,如最近有人利用6LiF和7LiF三明治型反照率剂量计探测n、C混合物中子剂量〔2〕等。
作为反照率剂量计的探测元件现在已不再使用核径迹乳胶,大都使用T LD,主要是LiF 片子。
而且随着LiF敏化片LiF(M g,T i,M)和LiF(M g,Cu,P)片的出现,反照率剂量计的灵敏度也有较大提高,一般做到探测下限0.1mSv问题不大。
如果能解决径迹蚀刻记录和读出自动化问题。
使用带辐射体的径迹蚀刻探测器代替T LD探测器,反照率剂量计的灵敏度会有更大提高。
TLD反照率剂量计的优点是造价低、易读,可以大量使用,所以目前仍有不少国家作为指定中子个人剂量计使用〔3〕,包括德国、英国和巴西等国家。
本文就T LD反照率个人剂量计的原理、设计和刻度问题作些介绍。
2 原理简介反照率中子个人剂量计的原理〔4,5〕是利用热中子探测器探测经人体慢化反射回来的中子,探测器可以是胶片、TLD,甚至径迹蚀刻探测器。
T LD剂量计主要是利用6LiF和7LiF对探测器中的6Li的6Li(n,A)3H反应探测中子。
由于6Li和7Li同时对光子灵敏,而7Li对中子不灵敏,这样由7Li和6Li的响应差扣除光子剂量而得到中子剂量。
设想一对6Li和7Li探测器放在已知剂量当量H p,n(10)的中子辐射场中[H p,n(10)可以用多球技术或组织等效正比计数器测定],则TLD探测器的中子剂量当量响应为:R H,n=M/H p,n(1)其中,M为T LD读出仪对剂量计的反照中子剂量读数。
邻接表实现迪杰斯特拉算法求最短路径-概述说明以及解释1.引言1.1 概述在图论中,寻找两个不同顶点之间的最短路径是一个常见的问题。
迪杰斯特拉算法是一种经典的解决最短路径问题的算法之一。
该算法采用贪心的策略,通过不断地更新起始顶点到其他顶点的最短距离,在最终找到最短路径的过程中。
邻接表是一种常用的图表示方法,将图的结构信息存储在一个表中,可以方便地查找与每个顶点相邻的顶点。
将迪杰斯特拉算法与邻接表结合起来,可以更高效地求解最短路径问题。
本文将介绍迪杰斯特拉算法的基本概念,并详细讨论如何通过邻接表实现迪杰斯特拉算法来求解最短路径问题。
通过对算法步骤的分析和实例的展示,读者将更加深入地理解迪杰斯特拉算法的原理和实现方式,以及邻接表在算法中的重要作用。
json"1.2 文章结构": {"本文主要分为引言、正文和结论三个部分。
引言部分将对文章进行整体概述,包括迪杰斯特拉算法的基本原理和应用背景。
正文部分将详细介绍迪杰斯特拉算法的原理和邻接表的概念及构建方法,同时介绍如何利用邻接表实现迪杰斯特拉算法求解最短路径问题。
结论部分将总结迪杰斯特拉算法在最短路径问题中的应用情况,探讨邻接表实现迪杰斯特拉算法的优势,并展望未来可能的研究方向。
"}1.3 目的本文的目的是介绍如何利用邻接表实现迪杰斯特拉算法求解最短路径问题。
通过深入讨论迪杰斯特拉算法的原理和邻接表的构建方式,帮助读者理解算法的具体实现过程。
此外,我们还将分析邻接表实现迪杰斯特拉算法的优势和应用场景,以及展望未来在这一领域的研究方向。
通过本文的阐述,读者将能够更好地掌握迪杰斯特拉算法在最短路径问题中的应用,并在实际工程中灵活运用该算法解决复杂的路径规划问题。
2.正文2.1 迪杰斯特拉算法简介迪杰斯特拉算法是一种用来求解最短路径的经典算法,也被称为单源最短路径算法。
该算法由荷兰计算机科学家艾兹格·迪杰斯特拉在1956年提出。
TLD算法原理及应用实例TLD(Tracking-Learning-Detection)算法是一种基于机器学习的目标跟踪算法,它可以用于实时跟踪视频中的目标物体,并通过学习目标外观的变化来提高跟踪的准确性。
在定位阶段,TLD算法会通过初始目标框的位置,提取目标的特征描述子,例如Haar-like特征或HOG特征等。
利用目标的外观特征,TLD算法能够预测目标在下一帧中的位置,从而实现目标的跟踪。
在学习阶段,TLD算法会根据目标的当前外观和位置信息,更新目标的外观模型。
通过学习目标的外观模型,TLD算法能够适应目标外观的变化,尤其是面对目标干扰、遮挡或形变等情况。
在检测阶段,TLD算法会使用学习到的目标外观模型,在整个图像中进行物体检测。
通过检测步骤,TLD算法可以发现目标的新位置,并在跟踪过程中进行修正,以保持目标在视频帧中的准确跟踪。
1.视频监控:TLD算法可以用于实时监控摄像头拍摄的视频,跟踪并定位监控区域内的目标,例如行人、车辆等。
在安防领域,TLD算法可以实现24小时不间断的目标跟踪,帮助安保人员及时发现异常事件。
2.交通管理:TLD算法可以用于交通监控系统,实时跟踪车辆并提取其特征信息,例如车牌号码、车辆颜色等。
通过车辆的跟踪,交通管理部门可以及时收集交通数据,并实现车辆违法行为的监测和处罚。
3.人机交互:TLD算法也可以应用于人机交互领域。
通过跟踪用户的手势或身体动作,可以实现手势识别、动作捕捉等功能。
这个应用场景可以应用在虚拟现实、游戏、体感互动等领域。
4.智能驾驶:TLD算法在自动驾驶系统中也有广泛的应用。
通过实时跟踪其他车辆和行人,自动驾驶车辆可以及时做出反应,规避潜在的危险。
同时,TLD算法可以学习车辆和行人的行为模式,提高自动驾驶系统的感知和决策能力。
总结来说,TLD算法是一种基于机器学习的目标跟踪算法,可以应用于视频监控、交通管理、人机交互等领域。
通过利用目标的外观特征、学习目标的外观模型,并结合物体检测方法,TLD算法可以实现高精度的目标跟踪,并在实际应用中发挥重要作用。
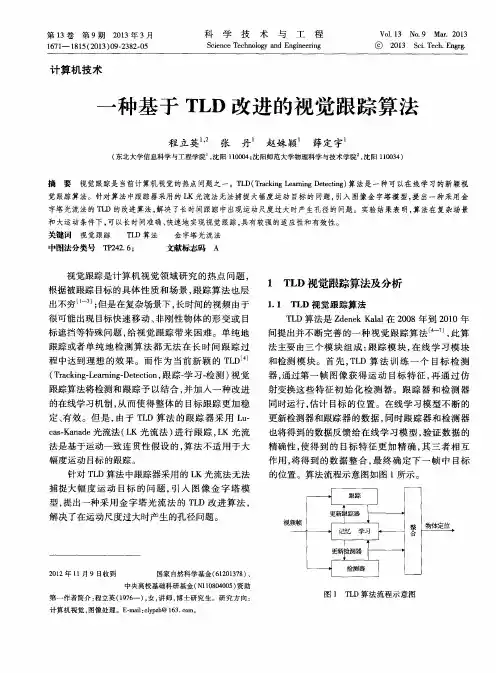
第45卷 第3期2021年5月激 光 技 术LASERTECHNOLOGYVol.45,No.3May,2021 文章编号:1001 3806(2021)03 0292 06基于改进TLD算法的激光视觉传感型焊缝跟踪杜健准1,高向东1,黎扬进1,肖小亭1,孙友松1,卢新钊2(1.广东工业大学广东省焊接工程技术研究中心,广州510006;2.广东精泰人防工程有限公司,肇庆526238)摘要:为了解决基于线激光视觉传感的焊缝中心位置定位精度不高的问题,采用了一种基于改进跟踪 学习 检测(TLD)算法的焊缝跟踪方法。
由激光视觉传感器实时获取焊缝图像,采用将跟踪器与检测器结合的TLD算法实时跟踪焊缝特征点,同时通过在线学习机制更新分类器参量。
在此基础上对激光条纹图像截取感兴趣区域,大幅减少检测器的搜索区域;根据激光条纹光强分布特性,结合纠偏方向选取跟踪器有效特征点,以此提高算法效率,对不锈钢板V型焊缝和搭接焊缝进行跟踪试验。
结果表明,跟踪与检测可实现共同定位焊缝中心位置,其融合的焊缝跟踪方法能够准确地提取焊缝特征点,两种焊缝跟踪平均绝对误差分别为0.062mm和0.052mm。
此方法为提高焊缝跟踪精度提供了依据。
关键词:图像处理;焊缝跟踪;跟踪 学习 检测算法;激光视觉中图分类号:TN249;TG409 文献标志码:A doi:10 7510/jgjs issn 1001 3806 2021 03 004AlaservisionsensingmethodforseamtrackingbasedonanimprovedTLDalgorithmDUJianzhun1,GAOXiangdong1,LIYangjin1,XIAOXiaoting1,SUNYousong1,LUXinzhao2(1.GuangdongProvincialWeldingEngineeringTechnologyResearchCenter,GuangdongUniversityofTechnology,Guangzhou510006,China;2.GuangdongJingtaiCivilAirDefenseProjectsCo.Ltd.,Zhaoqing526238,China)Abstract:Inordertosolvetheproblemoflowpositioningaccuracyoftheweldseamcenterbasedonlinelaservisionsensing,aseamtrackingmethodbasedonanimprovedtracking learning detection(TLD)algorithmwasadopted.Theweldimageswereacquiredinrealtimeduringtheweldseamtracking.TheTLDalgorithmcombiningthetracker(tracking)andthedetector(detection)wasadoptedtotrackweldfeaturepointsinrealtimeandtheonlinelearningmechanism(learning)wasadoptedtoupdatetheclassifierparameters,soastoimprovetheaccuracyofseamtracking.Onthisbasis,theregionofinterest(ROI)wasinterceptedfromthelaserstripeimages,whichgreatlyreducedthedetector’ssearcharea.Theeffectivefeaturepointsofthetrackerwereselectedtoimprovetheefficiencyofthealgorithmaccordingtothecharacteristicsofthelightintensitydistributionofthelaserstripeincombinationwiththerectifyingdirection.TheV shapedweldandthelappedweldofthestainlesssteelplateweretracked.Theresultsindicatethatthelocationoftheseamcentercanbeachievedbytrackinganddetectingandthefusionweldtrackingmethodcanaccuratelyextractweldfeaturepoints.Themeanabsolutetrackingerrorsofbothweldseamswere0.062mmand0.052mm.Thismethodprovidesthebasisforimprovingtheaccuracyofweldseamtracking.Keywords:imageprocessing;seamtracking;TLDalgorithm;laservision 基金项目:国家自然科学基金资助项目(51675104);广州市科技计划资助项目(202002020068);广东省教育厅创新团队资助项目(2017KCXTD010)作者简介:杜健准(1994 ),男,硕士研究生,主要从事焊接自动化方面的研究。
矩形TLD深水模型公式推导与验证田志昌;辛洪强;郑果【摘要】本文在流体动力学的基础上,进一步推导完善TLD深水模型的计算公式.并在正弦激励作用下,利用Housner集中质量法对深水模型求得的计算结果进行检验.结果显示本文推导的公式是正确的,并有足够的精度.【期刊名称】《内蒙古科技大学学报》【年(卷),期】2015(034)001【总页数】5页(P76-80)【关键词】TLD;深水模型;集中质量法;正弦激励【作者】田志昌;辛洪强;郑果【作者单位】内蒙古科技大学建筑与土木工程学院,内蒙古包头014010;内蒙古科技大学建筑与土木工程学院,内蒙古包头014010;内蒙古科技大学建筑与土木工程学院,内蒙古包头014010【正文语种】中文【中图分类】TU311.4Key words:tuned liquid damper; the deep-water model; lumped-mass method; Sine Excitation调频液体阻尼器(TLD)作为一种被动控制装置,其减振机理是利用结构上固定容器内液体的惯性和粘性耗能,将TLD中的液体振荡周期调整到结构的某一振型周期附近,得到最大的动水压力即对结构的控制力,从而达到减少结构振动反应的目的.本文目的是探索TLD的拟固体化,尝试改变目前设计中固体-流体相互作用的复杂迭代计算.而直接的解析公式是最理想的形式,所以,根据流体力学原理探索矩形深水水箱对动力作用下的压力计算解析公式,并采用集中质量法对其验证.集中质量法(模型如图1所示)是Housner模型的俗称.Housner理论基于如下的基本假定:箱壁是刚性的;认为液体仅有小的表面移动,与箱壁总是保持着紧密接触;对于流体晃动仅考虑一阶频率;箱体没有翘离.集中质量法基于上述假设,所得数值与实际值相比会偏小.其基本原理是:将外部激励下水箱中的液体晃动对箱壁产生的动液压力分为脉动压力和振荡压力两部分,脉动压力与水箱加速度成正比,但是方向相反,振荡压力取决于液体振荡的波高和频率.Housner教授通过大量的试验研究与对比,将这两种动液压力分别用两个与箱体连接形式不同的等效质量的振动效应来模拟,最终得到目前普遍应用于TLD研究领域的简化模型.其中M1为脉动质量,与箱体固结;M2为振荡质量,与箱体弹性连接.Housner同时还给出了矩形水箱的简化计算方法.其中,M1为脉动质量,M2为振荡质量,K为等效弹簧的刚度,g为重力加速度;h为水浑,L为水箱受力方向边长.由拉格朗日方程:求得:水箱的形式分为矩形和圆形,本文以分析矩形水箱为主.矩形深水水箱模型如图2所示,所谓深水水箱是指水深与矩形水箱振动方向的边长之比大于的水箱.这种情况下液体振动时水面晃荡较小,这样可忽略了水的非线性,在线性范围内建立水箱水晃动的力学模型.充满液体容器的液体运动的研究一般为小振幅运动,为了简化计算分析,采用如下基本假定:(1)水箱内的水是不可压缩的,无粘性的,并且在初始状态为静止的情况下,水箱中的水将始终保持无旋运动;(2)水箱壁是刚性的,固定在结构上,而且忽略水与箱壁之间的摩擦与粘附作用;(3)水箱中的水的晃动是微幅和缓慢的;(4)水箱只沿着结构层运动方向作水平运动.下面写出深水矩形TLD水箱中水的运动方程.由连续条件知,存在速度势函数φ=φ(x,z,t)满足Laplace方程:并且令:u=φx,v=φz.式中,u和v分别是水在x和z方向上的速度.由基本假定(4),可知在水箱底部,即z=-h处,液体晃动沿竖向速度为0,得底部边界条件:由Bernoulli法则:在水的自由表面处,液压力p|z=0=0,由于在深水TLD水箱中,水的晃荡是微幅和缓慢的,可近似认为φt|z=0=φt|z=n,忽略水运动速度的平方项,于是得到水自由表面的动力边界条件:考虑到波高η是微小的,可得深水TLD水箱中水自由表面的运动边界条件:在水箱的左右侧壁处,即x=0,L处,水的水平速度应该与水箱运动速度相同,于是:式中,г为TLD所在层的水平速度.TLD水箱中水的速度势函数的初始条件为:将液体运动速度势φ(x,z,t)表示成两个速度势之和:其中,φ1为TLD中水的刚体运动势函数,φ2为势函数φ1作用情况下水中压力不平衡所产生的液动压力所对应的势函数.将势函数φ1取为形式:而把势函数φ2取为形式:f*(t)为一个待定变量,由上可以显然看出势函数φ1满足laplace方程及边界条件,现在将势函数φ2代入方程(1),并分离变量,得:考虑到φ2需要满足的边界条件,这些方程可取下列形式的解:其中,从而,φ2(x,z,t)可表示为:将各线性无关解按照n取和,给出:φ2(x,z,t)=(t)cosh).由于(t)未定,可用乘,得:于是,φ2(x,z,t)可重新写为:φ2(x,z,t)=fn(t)).将φ1和φ2带入式(5),可得:将式(13)带入式(4),得:将x在区间[0,L]内展开为x的余弦级数:将等式两端同时乘以,并对区间[0,L]积分,考虑到关系式:于是得:从而有:将式(15)代入式(14),在零初始条件下,可得到确定f n(t)的如下方程组:如果记:则对于无阻尼液体,有:n=1,3,5,…对于阻尼液体,有:,n=1,3,5,…这里,ωn是容器中液体的固有振动频率.深水模型计算公式求解过程中,qn(t)的结果用MATLAB求解更方便,经多次尝试,初始条件为n(0)=0.3时求得的数值解代入公式,所得结果最为理想.最终液体运动总速度势等于:φ(x,z,t)=φ1(x,z,t)+φ2(x,z,t)=深水TLD中水的粘滞性的影响可忽略,速度势函数中由式(17)确定.根据线性化的Bernoulli方程,可得到矩形TLD中水内部任意一点处的液动压力为:则矩形TLD对结构的控制力为TLD左右箱壁上的液动压力的合力:FTLD=-∫-h0Bp(0,z,t)dy+∫-h0Bp(L,y,t)dy其中,MT=ρLBh;;n=1,3,5,….由上式可以看出,随n的增大,减少得很快,因此,一阶晃荡在FTLD中占主要作用,在实际工程应用中进行结构动力反应计算时,可仅考虑液体的一阶晃荡,从而大大简化了TLD系统减振力的计算.只考虑水的一阶振型的影响时,有:式中,;深水模型计算公式的推导提出,是为了推广深水模型TLD的应用.相对深水水箱而言,浅水水箱只适合做阻尼器,不适合其它用途,比如生活、消防等水箱,且数量较多,需要专门的大空间来放置水箱,提高了工程造价;深水理论主要假设是液面运动是微幅的,用线性理论来刻画液体的运动,与之对应的深水水箱则可以方便地用生活水箱改装,既不用制作专门的水箱,也不需要额外的盛放空间,造价低,适合生活、办公用的高层建筑.深水模型计算公式的推导提出,最终是为了简化计算过程,为以后拟固体单元的实现打下基础.拟固体单元属于固体力学的范畴,避免了液体与固体的迭代,提高了结果的可靠性,成倍缩短了计算时间.拟固体单元可以直接植入到普通的建筑结构有限元软件中进行非线性有限元地震时程反应计算.如果加入到PKPM、YJK、广夏等软件,结构工程师就可以很方便的得到计算结果.对长、宽、高为1 m×1 m×1 m,水深为0.624 49 m的水箱模型施加y=0.1sin3.188 59 t的正弦激励,算得两种模型在正弦激励下的反力结果,如图3所示.在实际结构中,高阶振型对结构的影响远远小于一阶振型,所以在两种模型计算中均只控制第一阶振型.在实际软件模拟过程中会出现非稳态情况,但是在用公式计算过程中,所得到的曲线是呈现稳态变化的,同时从图3可以看出,在正弦激励作用下,深水模型计算得出的作用力也呈现规律的正弦变化,且深水模型算得的结果与集中质量法计算得出的结果相比,大概有10 kN左右的误差,差别不大,但是峰值略大,与实际结果更为接近.所以,在正弦激励作用下,深水模型公式是相对准确的,但在数值波形激励作用下的准确性有待进一步验证.(1)本文推导的深水模型反力计算公式是正确的,并且有足够精度;(2)本文推导的深水模型反力计算公式较其它算法简便,易编程.[1] 李宏男.振动与控制[M].北京:中国建筑工业出版社,2005:209-224.[2] 田志昌,张猛,张晓.用于高层结构减振的高位TLD设计[J].内蒙古科技大学学报,2013,32(3):298-302.[3] 陈招平,董平.调谐液体阻尼器动力响应的数值模型[J].建筑结构,2008,38(6):45-47.[4] 倪向雷.被动调谐型动力吸振器参数优化研究[D].大连:大连理工大学,2007.[5] 李承.高层建筑多模态地震反应多重TLD控制研究[D].天津:天津大学,2000.。