线性判别函数
- 格式:ppt
- 大小:1.13 MB
- 文档页数:68
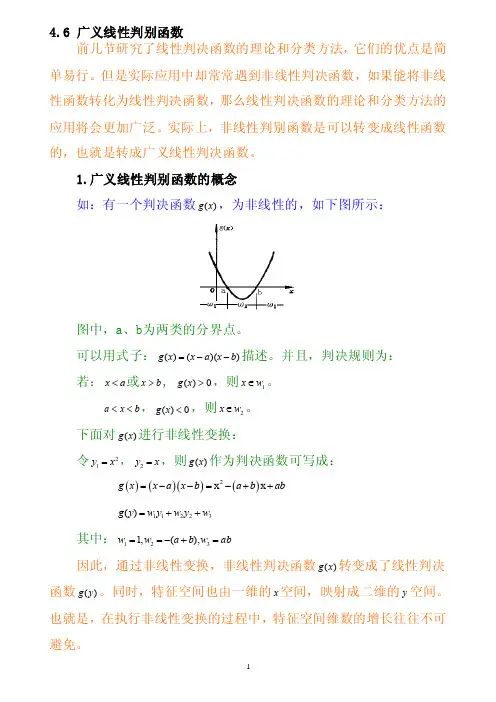
4.6 广义线性判别函数前几节研究了线性判决函数的理论和分类方法,它们的优点是简单易行。
但是实际应用中却常常遇到非线性判决函数,如果能将非线性函数转化为线性判决函数,那么线性判决函数的理论和分类方法的应用将会更加广泛。
实际上,非线性判别函数是可以转变成线性函数的,也就是转成广义线性判决函数。
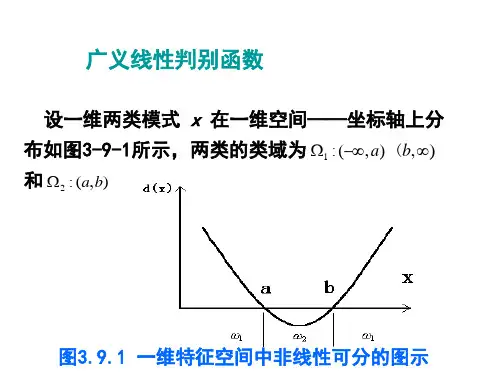
1.广义线性判别函数的概念如:有一个判决函数)(x g ,为非线性的,如下图所示:图中,a 、b 为两类的分界点。
可以用式子:))(()(b x a x x g --=描述。
并且,判决规则为: 若:a x <或b x >, 0)(>x g ,则1w x ∈。
b x a <<,0)(<x g ,则2w x ∈。
下面对)(x g 进行非线性变换:令21x y =,x y =2,则)(x g 作为判决函数可写成:()g x =()()x a x b --()2x x a b ab =-++32211)(w y w y w y g ++=其中:ab w b a w w =+-==321),(,1因此,通过非线性变换,非线性判决函数)(x g 转变成了线性判决函数)(y g 。
同时,特征空间也由一维的x 空间,映射成二维的y 空间。
也就是,在执行非线性变换的过程中,特征空间维数的增长往往不可避免。
在y 的特征空间里,区分直线为:0)(21=++-ab y b a y ,如下图:区分直线把y 空间线性地划分为两个类型区域1w 和2w ,判决规则为:若0)(>y g ,则1w y ∈,也就是1w x ∈0)(<y g ,则2w y ∈,也就是2w x ∈对样本x 的测量值:① 先进行非线性变换,x y x y ==221, ② 计算)(x g 之值,ab y b a y x g ++-=21)()( ③ 判决类别下面讨论非线性判决函数的一般形式: 把非线性判决函数写成一般形式,就是:12211)(....)()()(+++++=d d d w x f w x f w x f w x g其中,)(x f i (d i ,...,2,1=)是x 的单值实函数,且存在非线性关系,x 是k 维的。

Fisher判别函数,也称为线性判别函数(Linear Discriminant Function),是一种经典的模式识别方法。
它通过将样本投影到一维或低维空间,将不同类别的样本尽可能地区分开来。
一、算法原理:Fisher判别函数基于以下两个假设:1.假设每个类别的样本都服从高斯分布;2.假设不同类别的样本具有相同的协方差矩阵。
Fisher判别函数的目标是找到一个投影方向,使得同一类别的样本在该方向上的投影尽可能紧密,而不同类别的样本在该方向上的投影尽可能分开。
算法步骤如下:(1)计算类内散度矩阵(Within-class Scatter Matrix)Sw,表示每个类别内样本之间的差异。
Sw = Σi=1 to N (Xi - Mi)(Xi - Mi)ᵀ,其中Xi 表示属于类别i 的样本集合,Mi 表示类别i 的样本均值。
(2)计算类间散度矩阵(Between-class Scatter Matrix)Sb,表示不同类别之间样本之间的差异。
Sb = Σi=1 to C Ni(Mi - M)(Mi - M)ᵀ,其中 C 表示类别总数,Ni 表示类别i 中的样本数量,M 表示所有样本的均值。
(3)计算总散度矩阵(Total Scatter Matrix)St,表示所有样本之间的差异。
St =Σi=1 to N (Xi - M)(Xi - M)ᵀ(4)计算投影方向向量w,使得投影后的样本能够最大程度地分开不同类别。
w= arg max(w) (wᵀSb w) / (wᵀSw w),其中w 表示投影方向向量。
(5)根据选择的投影方向向量w,对样本进行投影。
y = wᵀx,其中y 表示投影后的样本,x 表示原始样本。
(6)通过设置一个阈值或使用其他分类算法(如感知机、支持向量机等),将投影后的样本进行分类。
二、优点和局限性:Fisher判别函数具有以下优点:•考虑了类别内和类别间的差异,能够在低维空间中有效地区分不同类别的样本。
1、线性判别函数的正负和数值大小的几何意义2、支持向量机的判别函数,adaboost的判别函数3、什么是聂曼-皮尔逊判决准,什么是最小最大判决准则4、感知器算法特点5、什么是特征,什么是特征提取,什么是特征选择?6、分类和聚类有何区别?分别说出2-3种代表性算法7、Fisher算法的特点?8、数据预处理主要有哪些工作?9、什么是大数据,大数据有何特点?10、聚类中距离度量的方式有哪些,连续性数据和和二值数据分别怎么度量9、什么是Gini指数,其作用是什么?10、马式距离较之于欧式距离的优点11、关联规则的经典算法有哪些,各自的优缺点?12、什么是分类,什么是回归?分类的过程或步骤13、分类评价标准,怎么评价分类的优劣14、什么是数据,样本、什么是抽样15、什么是机器学习以及机器学习的一般步骤16. 样本属性的主要类型17.人工神经网络的激活函数有哪些?18.信息增益,在ID3算法中怎么用,表示什么含义19.二维数据三个混合项的高斯模型的概率密度方程20、什么是聚类?聚类分析有哪些主要距离度量方法21、什么是频繁项集22、关联规则的2大指标,支持度,可信度,(名词解释)23、什么是关联规则?怎样通过频繁K项集产生关联规则24、什么是贝叶斯网络及作用25、ID3算法及步骤26、神经网络的优缺点,bp网络的优缺点27、分工神经网络主要是模拟人脑的哪些能力?单层感知器有什么缺点?28、什么是过拟合,怎么解决过拟合?29、衡量模式识别与机器学习算法优劣的标准30、什么是有监督学习、什么无监督学习31、基于最小错误率的贝叶斯决策及基于最小风险的贝叶斯决策解决实际问题。
32、贝叶斯决策算法,最小风险贝叶斯、感知器算法、Apriori 算法、、K-中心算法、k-均值算法,等算法,步骤及伪代码。
实际问题示例:1、支持度20%,置信度20%,用Apriori 算法找出所有关联规则(要求完整步骤,写出所有的候选集,k 项集,及所有关联规则)2、识别鲈鱼和鲑鱼,其先验概率分别为 P(w 1)=0.9,P(w 2)=0.1,现有一待识别的鱼,其观察值为x ,从类条件概率密度分布曲线上查得1()0.6P x w =,4.0)(2=w x P ,并且已知011=λ,123λ=,121=λ,022=λ,分别写出自小风险和最小错误率的贝叶斯决策过程。