高一物理圆周运动绳模型和杆模型优选稿
- 格式:docx
- 大小:53.64 KB
- 文档页数:3
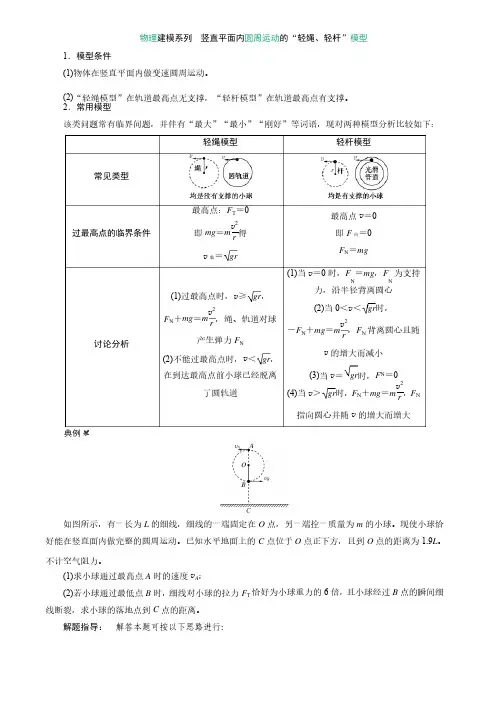
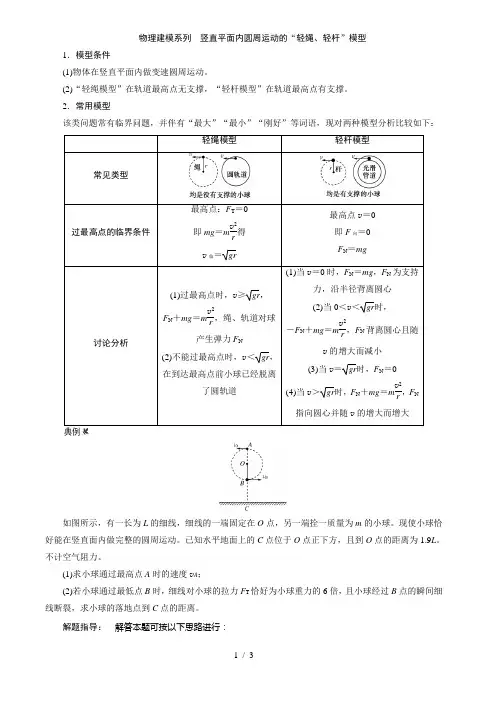
轻绳模型轻杆模型常见类型过最高点的临界条件最高点:F T =0 即mg =m v2r 得v 临=gr最高点v =0 即F 向=0 F N =mg讨论分析(1)过最高点时,v ≥gr , F N +mg =m v 2r,绳、轨道对球产生弹力F N(2)不能过最高点时,v <gr ,在到达最高点前小球已经脱离了圆轨道了圆轨道(1)当v =0时,F N=mg ,F N为支持力,沿半径背离圆心力,沿半径背离圆心 (2)当0<v <gr 时,时,-F N +mg =m v 2r,F N 背离圆心且随v 的增大而减小的增大而减小(3)当v =gr 时,F N =0 (4)当v >gr 时,F N +mg =m v 2r ,F N指向圆心并随v 的增大而增大的增大而增大如图所示,有一长为L 的细线,细线的一端固定在O 点,另一端拴一质量为m 的小球。
现使小球恰好能在竖直面内做完整的圆周运动。
已知水平地面上的C 点位于O 点正下方,且到O 点的距离为1.9L 。
不计空气阻力。
不计空气阻力。
(1)求小球通过最高点A 时的速度v A ;(2)若小球通过最低点B 时,细线对小球的拉力F T 恰好为小球重力的6倍,且小球经过B 点的瞬间细线断裂,求小球的落地点到C 点的距离。
点的距离。
解题指导: 解答本题可按以下思路进行:物理建模系列 竖直平面内竖直平面内圆周运动圆周运动的“轻绳、轻杆”模型1.模型条件(1)物体在竖直平面内做变速圆周运动。
物体在竖直平面内做变速圆周运动。
(2)“轻绳模型”在轨道最高点无支撑,“轻杆模型”在轨道最高点有支撑。
“轻绳模型”在轨道最高点无支撑,“轻杆模型”在轨道最高点有支撑。
2.常用模型该类问题常有临界问题,并伴有“最大”“最小”“刚好”等词语,现对两种模型分析比较如下:该类问题常有临界问题,并伴有“最大”“最小”“刚好”等词语,现对两种模型分析比较如下:分析小球的运动过程抓住小球在最高点的临界条件利用牛顿第二定律列方程mg =m v 2AL解得v A =gL 。
物理建模系列竖直平面内圆周运动的“轻绳、轻杆”模型1.模型条件(1)物体在竖直平面内做变速圆周运动。
(2)“轻绳模型”在轨道最高点无支撑,“轻杆模型”在轨道最高点有支撑。
2.常用模型该类问题常有临界问题,并伴有“最大”“最小”“刚好”等词语,现对两种模型分析比较如下:轻绳模型轻杆模型常见类型过最高点的临界条件最高点:F T=0即mg=mv2r得v临=gr最高点v=0即F向=0F N=mg讨论分析(1)过最高点时,v≥gr,F N+mg=mv2r,绳、轨道对球产生弹力F N(2)不能过最高点时,v<gr,在到达最高点前小球已经脱离了圆轨道(1)当v=0时,F N=mg,F N为支持力,沿半径背离圆心(2)当0<v<gr时,-F N+mg=mv2r,F N背离圆心且随v的增大而减小(3)当v=gr时,F N=0(4)当v>gr时,F N+mg=mv2r,F N指向圆心并随v的增大而增大如图所示,有一长为L的细线,细线的一端固定在O点,另一端拴一质量为m的小球。
现使小球恰好能在竖直面内做完整的圆周运动。
已知水平地面上的C点位于O点正下方,且到O点的距离为1.9L。
不计空气阻力。
(1)求小球通过最高点A时的速度v A;(2)若小球通过最低点B时,细线对小球的拉力F T恰好为小球重力的6倍,且小球经过B点的瞬间细线断裂,求小球的落地点到C点的距离。
解题指导:解答本题可按以下思路进行:分析小球的运动过程抓住小球在最高点的临界条件利用牛顿第二定律列方程绳子在B 点断裂后小球做平抛运动解析: (1)若小球恰好能做完整的圆周运动,则小球通过A 点时细线的拉力刚好为零,根据向心力公式有mg =m v 2AL解得v A =gL 。
(2)小球在B 点时,根据牛顿第二定律有F T -mg =m v 2BL其中F T =6mg解得小球在B 点的速度大小为v B =5gL细线断裂后,小球从B 点开始做平抛运动,则由平抛运动的规律得竖直方向上:1.9L -L =12gt 2水平方向上:x =v B t 解得x =3L即小球落地点到C 点的距离为3L 。
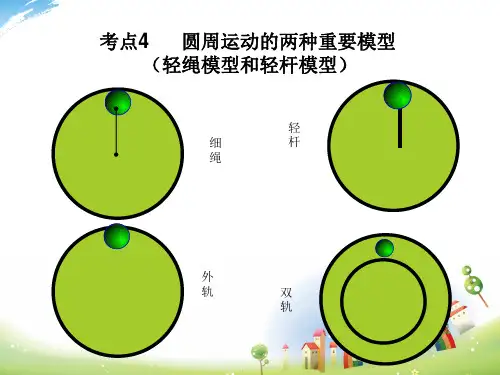
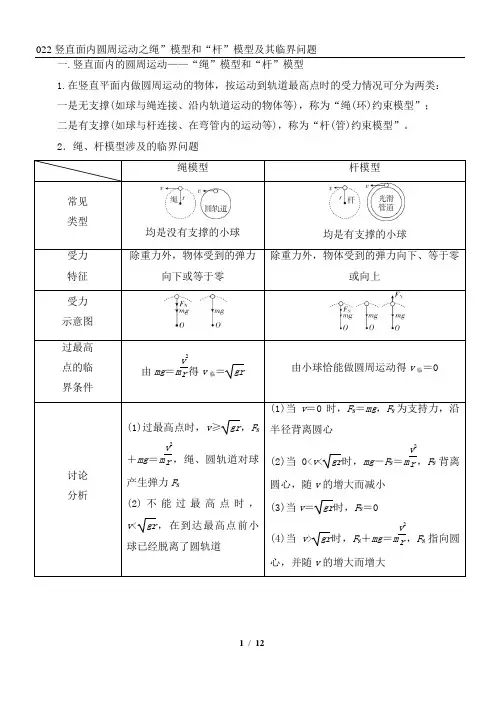
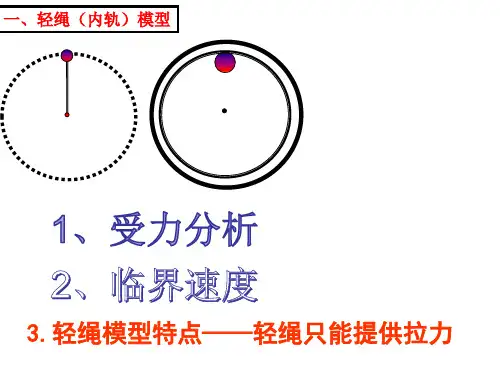
一.竖直面内的圆周运动——“绳”模型和“杆”模型1.在竖直平面内做圆周运动的物体,按运动到轨道最高点时的受力情况可分为两类:一是无支撑(如球与绳连接、沿内轨道运动的物体等),称为“绳(环)约束模型”;二是有支撑(如球与杆连接、在弯管内的运动等),称为“杆(管)约束模型”。
2.绳、杆模型涉及的临界问题绳模型杆模型常见类型均是没有支撑的小球均是有支撑的小球受力特征除重力外,物体受到的弹力向下或等于零除重力外,物体受到的弹力向下、等于零或向上受力示意图过最高点的临界条件由mg=mv2r得v临=gr由小球恰能做圆周运动得v临=0讨论分析(1)过最高点时,v≥gr,F N+mg=mv2r,绳、圆轨道对球产生弹力F N(2)不能过最高点时,v<gr,在到达最高点前小球已经脱离了圆轨道(1)当v=0时,F N=mg,F N为支持力,沿半径背离圆心(2)当0<v<gr时,mg-F N=mv2r,F N背离圆心,随v的增大而减小(3)当v=gr时,F N=0(4)当v>gr时,F N+mg=mv2r,F N指向圆心,并随v的增大而增大3.竖直面内圆周运动问题的解题思路二. 杆—球模型经典例题讲解与对点演练(一)例题例1:一轻杆一端固定质量为m 的小球,以另一端O 为圆心,使小球在竖直面内做半径为R 的圆周运动,如图所示,重力加速度为g ,则下列说法正确的是( ) A .小球过最高点时,杆所受到的弹力可以等于零 B .小球过最高点的最小速度是gRC .小球过最高点时,杆对球的作用力一定随速度增大而增大D .小球过最高点时,杆对球的作用力一定随速度增大而减小 答案 A解析 当小球在最高点所受的弹力为零时,有mg =m v 2R ,解得v =gR ,即当速度v =gR时,轻杆所受的弹力为零,所以A 正确.小球通过最高点的最小速度为零,所以B 错误.小球在最高点,若v <gR ,则有:mg -F =m v 2R ,轻杆的作用力随着速度的增大先减小后反向增大,若v >gR ,则有:mg +F =m v 2R ,轻杆的作用力随着速度增大而增大,所以C 、D 错误.(二)杆—球模型对点演练:1.如图所示,轻杆长3L ,在杆两端分别固定质量均为m 的球A 和B ,光滑水平转轴穿过杆上距球A 为L 处的O 点,外界给系统一定能量后,杆和球在竖直平面内转动,球B 运动到最高点时,杆对球B 恰好无作用力.忽略空气阻力,重力加速度为g ,则球B 在最高点时( ) A .球B 的速度为零 B .球A 的速度大小为2gL C .水平转轴对杆的作用力为1.5mg D .水平转轴对杆的作用力为2.5mg 答案 C解析 球B 运动到最高点时,杆对球B 恰好无作用力,即重力恰好提供向心力,则有mg =m v B 22L ,解得v B =2gL ,故A 错误;由于A 、B 两球的角速度相等,则球A 的速度大小v A =122gL ,故B 错误;B 球在最高点时,对杆无弹力,此时A 球受到的重力和拉力的合力提供向心力,有F -mg =m v A 2L ,解得:F =1.5mg ,根据牛顿第三定律可知,C 正确,D 错误.2.(2020·全国卷Ⅰ)如图,一同学表演荡秋千。
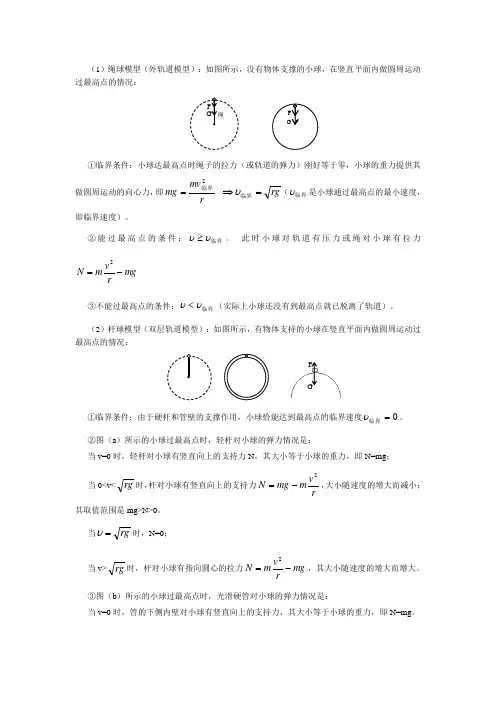
(1)绳球模型(外轨道模型):如图所示,没有物体支撑的小球,在竖直平面内做圆周运动过最高点的情况:①临界条件:小球达最高点时绳子的拉力(或轨道的弹力)刚好等于零,小球的重力提供其做圆周运动的向心力,即rmvmg2临界=⇒rg=临界υ(临界υ是小球通过最高点的最小速度,即临界速度)。
②能过最高点的条件:临界υυ≥。
此时小球对轨道有压力或绳对小球有拉力mgrvmN-=2③不能过最高点的条件:临界υυ<(实际上小球还没有到最高点就已脱离了轨道)。
(2)杆球模型(双层轨道模型):如图所示,有物体支持的小球在竖直平面内做圆周运动过最高点的情况:①临界条件:由于硬杆和管壁的支撑作用,小球恰能达到最高点的临界速度0=临界υ。
②图(a)所示的小球过最高点时,轻杆对小球的弹力情况是:当v=0时,轻杆对小球有竖直向上的支持力N,其大小等于小球的重力,即N=mg;当0<v<rg时,杆对小球有竖直向上的支持力rvmmgN2-=,大小随速度的增大而减小;其取值范围是mg>N>0。
当rg=υ时,N=0;当v>rg时,杆对小球有指向圆心的拉力mgrvmN-=2,其大小随速度的增大而增大。
③图(b)所示的小球过最高点时,光滑硬管对小球的弹力情况是:当v=0时,管的下侧内壁对小球有竖直向上的支持力,其大小等于小球的重力,即N=mg。
GF当0<v<rg 时,管的下侧内壁对小球有竖直向上的支持力rv m mg N 2-=,大小随速度的增大而减小,其取值范围是mg>N>0。
当v=gr 时,N=0。
当v>gr 时,管的上侧内壁对小球有竖直向下指向圆心的压力mg rv m N -=2,其大小随速度的增大而增大。
④图(c)的球沿球面运动,轨道对小球只能支撑,而不能产生拉力。
在最高点的v 临界=gr 。
当v=gr 时,小球将脱离轨道做平抛运动。
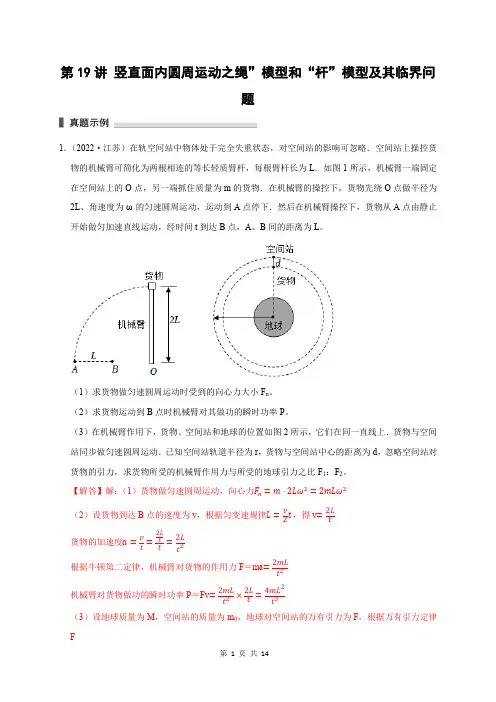
第19讲竖直面内圆周运动之绳”模型和“杆”模型及其临界问题1.(2022·江苏)在轨空间站中物体处于完全失重状态,对空间站的影响可忽略.空间站上操控货物的机械臂可简化为两根相连的等长轻质臂杆,每根臂杆长为L.如图1所示,机械臂一端固定在空间站上的O点,另一端抓住质量为m的货物.在机械臂的操控下,货物先绕O点做半径为2L、角速度为ω的匀速圆周运动,运动到A点停下.然后在机械臂操控下,货物从A点由静止开始做匀加速直线运动,经时间t到达B点,A、B间的距离为L。
(1)求货物做匀速圆周运动时受到的向心力大小F n。
(2)求货物运动到B点时机械臂对其做功的瞬时功率P。
(3)在机械臂作用下,货物、空间站和地球的位置如图2所示,它们在同一直线上.货物与空间站同步做匀速圆周运动.已知空间站轨道半径为r,货物与空间站中心的距离为d,忽略空间站对货物的引力,求货物所受的机械臂作用力与所受的地球引力之比F1:F2。
【解答】解:(1)货物做匀速圆周运动,向心力F n=m⋅2Lω2=2mLω2(2)设货物到达B点的速度为v,根据匀变速规律L=v2t,得v=2L t货物的加速度a=vt=2Ltt=2Lt2根据牛顿第二定律,机械臂对货物的作用力F=ma=2mL t2机械臂对货物做功的瞬时功率P=Fv=2mLt2×2L t=4mL2t3(3)设地球质量为M,空间站的质量为m0,地球对空间站的万有引力为F,根据万有引力定律F=GMm 0r 2① 地球对货物的万有引力F 2=G Mm (r−d)2②联立①②得m 0m=Fr 2F 2(r−d)2③设空间站做匀速圆周运动的角速度为ω0,根据牛顿第二定律对空间站F =m 0rω02④ 对货物F 2−F 1=m(r −d)ω02⑤联立③④⑤解得F 1F 2=r 3−(r−d)3r 3答:(1)货物做匀速圆周运动时受到的向心力大小为2m ω2L ; (2)货物运动到B 点时机械臂对其做功的瞬时功率为4mL 2t 3;(3)货物所受的机械臂作用力与所受的地球引力之比为r 3−(r−d)3r 3。
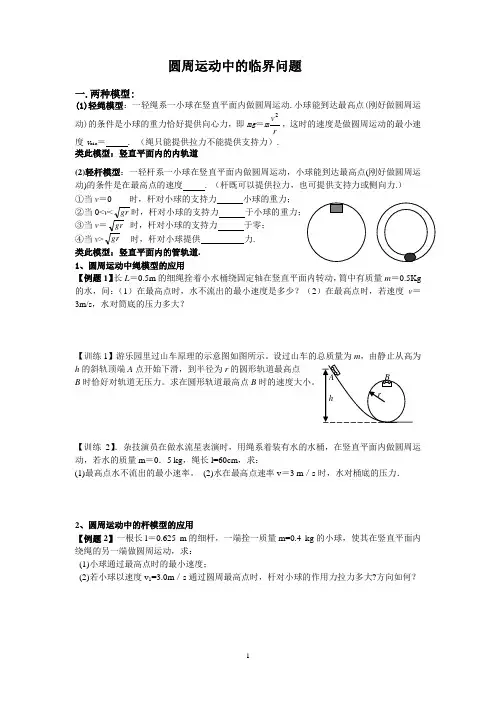
圆周运动中的临界问题一.两种模型:(1)轻绳模型:一轻绳系一小球在竖直平面内做圆周运动.小球能到达最高点(刚好做圆周运动)的条件是小球的重力恰好提供向心力,即mg =m rv 2,这时的速度是做圆周运动的最小速度v min = . (绳只能提供拉力不能提供支持力). 类此模型:竖直平面内的内轨道(2)轻杆模型:一轻杆系一小球在竖直平面内做圆周运动,小球能到达最高点(刚好做圆周运动)的条件是在最高点的速度 . (杆既可以提供拉力,也可提供支持力或侧向力.) ①当v =0 时,杆对小球的支持力 小球的重力; ②当0<v <gr 时,杆对小球的支持力于小球的重力;③当v=gr 时,杆对小球的支持力 于零; ④当v >gr 时,杆对小球提供 力. 类此模型:竖直平面内的管轨道.1、圆周运动中绳模型的应用 【例题1】长L =0.5m 的细绳拴着小水桶绕固定轴在竖直平面内转动,筒中有质量m =0.5Kg 的水,问:(1)在最高点时,水不流出的最小速度是多少?(2)在最高点时,若速度v =3m/s ,水对筒底的压力多大?【训练1】游乐园里过山车原理的示意图如图所示。
设过山车的总质量为m ,由静止从高为h 的斜轨顶端A 点开始下滑,到半径为r 的圆形轨道最高点B 时恰好对轨道无压力。
求在圆形轨道最高点B 时的速度大小。
【训练2】.杂技演员在做水流星表演时,用绳系着装有水的水桶,在竖直平面内做圆周运动,若水的质量m =0.5 kg ,绳长l=60cm ,求:(1)最高点水不流出的最小速率。
(2)水在最高点速率v =3 m /s 时,水对桶底的压力.2、圆周运动中的杆模型的应用【例题2】一根长l =0.625 m 的细杆,一端拴一质量m=0.4 kg 的小球,使其在竖直平面内绕绳的另一端做圆周运动,求:(1)小球通过最高点时的最小速度;(2)若小球以速度v 1=3.0m /s 通过圆周最高点时,杆对小球的作用力拉力多大?方向如何?vR 【训练3】如图所示,长为L 的轻杆一端有一个质量为m 的小球,另一端有光滑的固定轴O ,现给球一初速度,使球和杆一起绕O 轴在竖直平面内转动,不计空气阻力,则( ) A.小球到达最高点的速度必须大于gLB .小球到达最高点的速度可能为0 C.小球到达最高点受杆的作用力一定为拉力 D.小球到达最高点受杆的作用力一定为支持力【训练4】如图所示,在竖直平面内有一内径为d 的光滑圆管弯曲而成的环形轨道,环形轨道半径R 远远大于d ,有一质量为m 的小球,直径略小于d ,可在圆管中做圆周运动。
高一物理圆周运动绳模
型和杆模型
集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
圆周运动中绳模型和杆模型的一般解析一.绳模型:
若已不可伸长的绳子长L,其一端栓有一质量m的小球(可看成质点)。
现使绳子拉着小球绕一点O做匀速圆周运动,则
(1)小球恰好通过最高点的速度v
(2)当能通过最高点时,绳子拉F。
解:(1)小球恰能通过最高点的临界条件是绳子没有拉力,
则对小球研究,其只受重力mg作用,
故,由其做圆周运动得:
mg=mv2/L
故 v=√(gL)
(2)由分析得,当小球到最高点时速度v’﹥v=√(gl)时,F=mv’^2 /L-mg
而,当v’<v=√(gL)时,那么小球重力mg大于其所需向心力,因此小球做向心运动。
二.杆模型:
若一硬质轻杆长L,其一端有一质量m 的小球(可看成质点)。
现使杆和小球绕一点O做匀速圆周运动,则
(1)小球恰好通过最高点的速度v。
(2)当能通过最高点时,杆对小球的作用力F。
解:(1)因为杆具有不可弯曲不可伸长的性质,所以小球在最高点,当速度为0时,恰好能通过。
(2)①由绳模型可知,当小球通过最高点速度v=√(gL)时,恰好有绳子拉力为0,则同理可知,当杆拉小球到最高点时,
若小球速度v=√(gL)时,小球所需向心力恰好等于重力mg,
故,此时杆对小球没有作用力。
②当小球通过最高点时速度v>√(gL)时,则小球所需向心力比重力mg大,所以此时杆对小球表现为拉力,使小球不至于做离心运动? 故对小球有, F+mg=mv2 /L
③同理,当小球通过最高点时速度v<√(gL)时,
则小球所需向心力小于重力mg,所以此时小球对杆有压力作用,有牛顿第三定律得,杆对小球表现为支持力作用,故对小球有,
mg-F=mv2/L。