用解析法设计四杆机构共20页
- 格式:ppt
- 大小:2.75 MB
- 文档页数:20
四杆机构第三章平⾯四杆机构的设计§3—1 平⾯连杆机构的特点、类型及应⽤1.1 概述连杆机构:各构件之间⽤低副和刚性构件连接起来实⾏运动传递的机构。
如图2-1 分为平⾯连杆机构和空间连杆机构。
连杆机构由连架杆,连杆和机架组成。
平⾯连杆机构的特点:1.2平⾯连杆机构的基本类型和结构特点:由于连杆机构的构件⼀般呈杆状,也以其构件的数量称为多杆机构。
平⾯杆机构是最基本最常⽤的连杆机构。
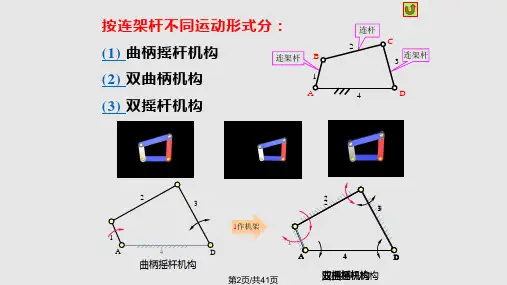
1.2.1 平⾯连杆机构的基本类型:1) 曲柄摇杆机构 2)双曲柄机构 3)双摇杆机构 1.2.2 平⾯连杆机构演化 1) 转动副转化为移动副 2)取不同的构件为机架3)变换构件的形态 4)扩⼤转动副的尺⼨§3—2 平⾯连杆机构的运动特性2.1平⾯连杆机构的运动特性:(1的Grashoff 定理(简称曲柄存在条件)a + d ≤b + cb ≤ d – a +c c ≤d – a + b a ≤ c a + b ≤ c + da ≤b a +c ≤ b +d a ≤ d a + d ≤ b + c在全铰链四杆机构中,如果最短杆与最长杆杆长之和⼩于或等于其余两杆杆长之和,则必然存在作整周转动的构件。
若不满⾜上述条件,即最短杆与最长杆杆长之和⼤于其余两杆杆长之和,则不存在作整周转动的构件。
(2)四杆机构从动件的急回特性:如图⽰四杆机构从动件的回程所⽤时间⼩于⼯作⾏程所⽤的时间,称为该机构急回特性。
急回特性⽤⾏程速⽐系数K 表⽰。
212112??===t t v v K极位夹⾓θ—— 从动摇杆位于两极限位置时,原动件两位置所夹锐⾓。
θ越⼤,K 越⼤,急回特性越明显。
§3—3 平⾯连杆机构的传⼒特性3.1.传动⾓与压⼒⾓:如图⽰在机构处于某⼀定位置时,从动件上作⽤⼒与作⽤点绝对速度⽅向所夹的锐⾓α称为压⼒⾓。
压⼒⾓的余⾓γ(γ = 90°— α)作为机构的传⼒特性参数,故称为传动⾓。
在四杆机构运动过程中,压⼒⾓和传动⾓是变化的,为使机构具有良好的传⼒特性应使压⼒⾓越⼩越好,传动⾓越⼤越好。
3.4 图解法设计平面四杆机构3.4.1按连杆位置设计四杆机构1.给定连杆的三个位置给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐?图解过程。
::1::::2::2.给定连杆的两个位置给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。
①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。
②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。
连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。
③测量A B1、C1D、A D计算l A B、L C D L A D的长度,由于A点可任意选取,所以有无穷解。
在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。
例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长0.5m和两个位置B1C1、B2C2.。
要求固定铰链中心A、D在同一水平线上并且A D=B C。
自己可以试着在纸上按比例作出图形,再求出各杆长度。
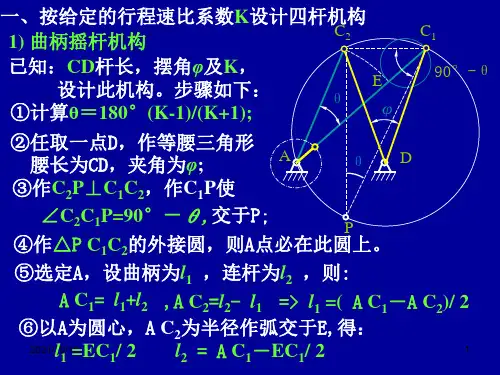
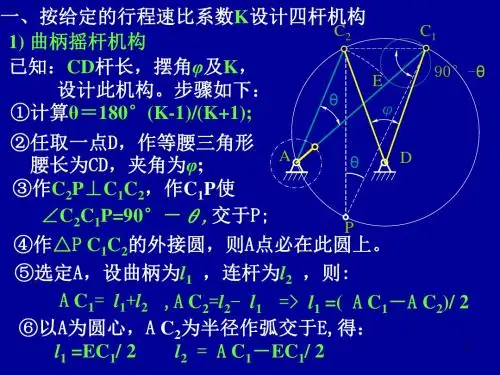
若想对答案请点击例题祥解3.4.2 按行程速度变化系数设计四杆机构1.设计曲柄摇杆机构按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。
怎样用作图法设计曲柄摇杆机构?2.设计曲柄摆动导杆机构已知机架长度l4和速度变化系数K,设计曲柄导杆机构。
①求出极位夹角②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。
③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点,A B1(或A B2)即为曲柄。
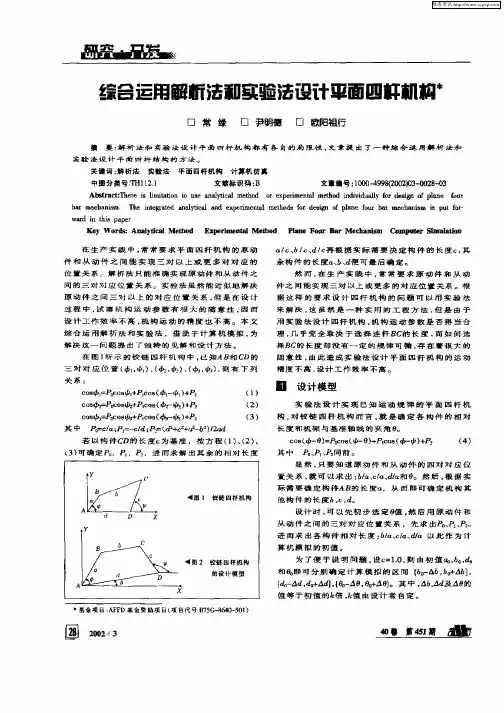
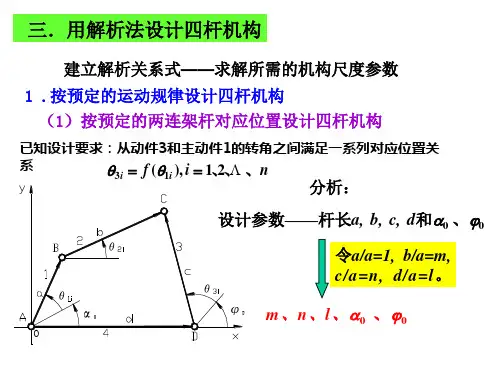
5.5平面四杆机构的解析法设计5.5.1按许用传动角设计曲柄摇杆机构设已知从动摇杆的摆角ψ、行程速比系数K,机架的杆长d=1,许用传动角[γ],设曲柄的杆长a为参变量,用解析法[23]确定连杆的杆长b以及摇杆的杆长c。
由行程速比系数K求出极位夹角θ,即θ=180(K-1)/(K+1)。
在图5.20中,由△B1B0B2得B1B2=2c sin(0.5ψ),对△A0B1B2应用余弦定理得由此得a、b、c 与θ的函数关系对△A3B3B0应用余弦定理得将式(5.13)代入式(5.14),得以 a 为设计变量的设计方程为设已知从动摇杆的摆角ψ、若θ=0,K=1,机架的杆长d=1,许用传动角[γ]。
用解析法确定曲柄的杆长a、连杆的杆长b以及摇杆的杆长c。
在图5.21中,K=1,摇杆在B3B0、B4B0位置出现最小传动角且两个最小传动角相等,对△A1B1B0、△A1B2B0应用余弦定理化简上式得机构杆长之间的约束方程为对△A4B4B0、△A3B3B0应用余弦定理得化简上式得令式(5.13)中的θ=0,得杆长c的函数式为联立式(5.20)~(5.23)得曲柄的杆长a、连杆的杆长 b 以及摇杆的杆长 c 的设计方程为【点击链接曲柄摇杆机构的设计动画】5.5.2刚体导引机构的解析法设计刚体导引机构是指它的连杆能够通过一系列有限分离位置的一种机构。
其解析法设计就是建立机构的结构参数与运动参数之间的关系式,采用适宜的数学方法,按一定的精度要求,求出机构的未知参数。
1)平面位移矩阵设一连杆在平面坐标系xOy 中占据n 个位置,连杆的第j(j=1,2,…,n)个位置用向量P j Q j表示。
如图5.22 所示,连杆由位置P1Q1运动到P j Q j可以看成由P1Q1平移到P j Q'j再绕Pj 点转动θ1j的运动之和。
设[Rθ1j]表示连杆旋转θ1j后,其上的向量在旋转前后的关系矩阵,则( Qj -Pj ) = [Rθ1j]( Q'j-P j ) 由于Qj -Pj = Q1 -P1为此( Qj -Pj ) = [Rθ1j]( Q1 -P1 )式中[D1j]为[D1j]称为平面位置矩阵。