用解析法进行四连杆机构的运动学分析
- 格式:pdf
- 大小:145.13 KB
- 文档页数:3
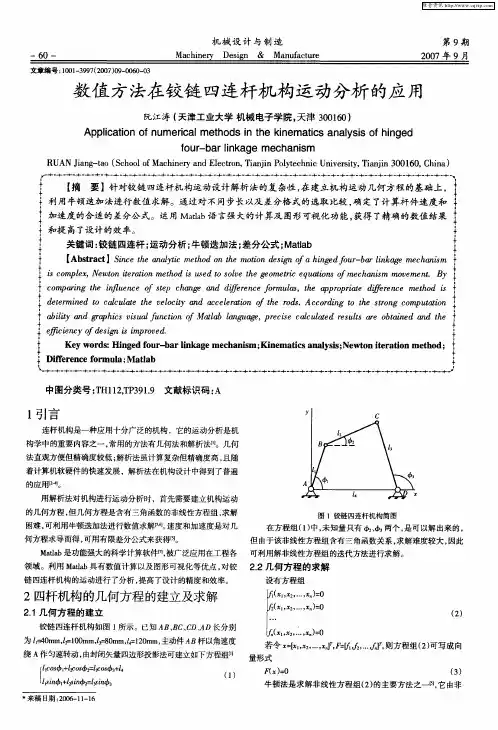
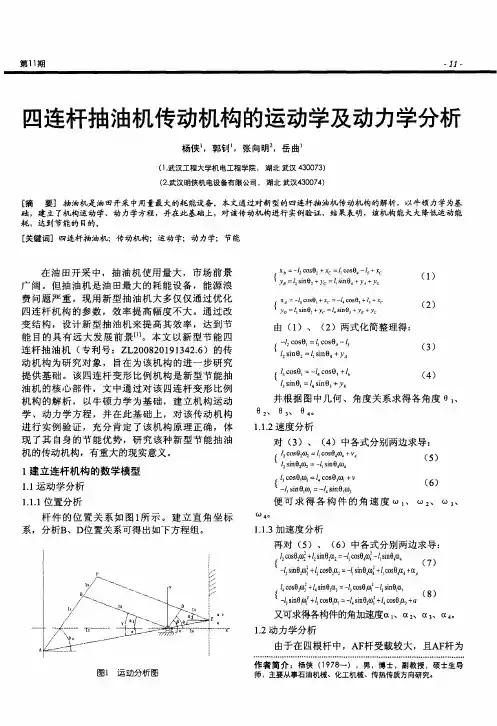
液压支架四连杆机构运动学分析周保卫【摘要】根据液压支架四连杆机构的几何关系和尺寸参数,建立了以前连杆水平倾角为自变量的液压支架四连杆机构运动分析通用数学模型.利用牛顿-辛普森算法确定各连杆的角度.通过编制MATLAB程序求解得到掩护梁与顶梁铰接点运动轨迹,以及各连杆运动参数随前连杆角度的变化规律,为液压支架的优化设计奠定了基础.【期刊名称】《煤矿机电》【年(卷),期】2018(000)004【总页数】4页(P78-80,83)【关键词】液压支架;四连杆机构;运动学【作者】周保卫【作者单位】阳泉煤业集团有限责任公司,山西阳泉045000【正文语种】中文【中图分类】TD355.410 引言液压支架是综合机械化采煤的重要设备,它可有效支撑和控制采煤工作面的顶板,并可隔离采空区,以防止矸石进入工作区域和输送机内,其性能和可靠性对综采成败影响重大。
液压支架四连杆机构是液压支架整体设计的重要环节,如图1中的虚线框所示,它主要由前连杆、后连杆、底座和掩护梁构成,其主要作用是保证支架在支撑顶板恒阻状态时纵向和横向的稳定性,作为主要承受和传递外载荷的部件,也保证了液压支架整体的刚度要求[1]。
因此,对液压支架四连杆机构的分析和研究很有必要。
液压支架的设计要求顶梁前端点的运动轨迹呈双摆线或近似直线,同时要求支架在整个伸缩范围内顶梁前端点运动轨迹的最大宽度尽可能小[2]。
由图1可知,四连杆机构设计的好坏决定了顶梁运动的轨迹,也决定了支架轮廓尺寸的变化。
因此,需要对液压支架四连杆机构进行运动学分析,计算顶梁与掩护梁铰接点的运动轨迹,进而为整体结构的优化设计奠定基础[3]。
对于液压支架四连杆机构的运动学分析,目前主要采用作图法或基于虚拟技术的仿真法[4]。
本文给出了一种求解液压支架四连杆机构运动学分析的解析法,以液压支架前连杆的水平倾角为自变量,推导出支架升降过程中顶梁与掩护梁铰接点坐标计算模型,同时可得到各连杆运动参数随前连杆倾角的变化规律。
四连杆机构运动分析
1、组装零件:
---放置第一个零件常采用缺省;
---连接零件可采用销钉连接方式(机构能运动);
2、进入机构运动环境
---应用程序|机构---
---编辑|重新连接--- /检查装配情况
---运行(连接组件)---是(确认)---
3、观察机构中的体
---视图|加亮主体--- /绿色表示为地体
4、拖动模型
---单击‘拖动’按钮---
---任选四连杆上一点,拖动鼠标进行拖动---
---单击中建,结束拖动---
5、建立伺服电机
---选择‘伺服电动机’按钮---
---定义电机名称,运动轴--- /若装配正确,运动处都会出现
运动轴
---定义电机速度、加速度--- /可单击图像查看
6、仿真运动过程
---单击‘机构分析’按钮---
---选择‘运动学’分析类型,单击‘运行’观察运动情况---
7、回放并保存结果
单击‘回放’按钮可以进行回放;
8、产生分析测量结果
---分析|测量,打开‘测量结果’---
---单击‘新建’按钮(在测量栏中),打开‘测量定义’--- ---选择测量点,测量分量,坐标系---确定---
/测量点可以是零件端点,基准点,几何点
---单击画图,可以绘制结果图形---
9、产生轨迹曲线
---插入|轨迹曲线---
---选择点---确定---
/零件顶点,几何点可以产生轨迹,基准点不能产生轨迹,可以在模型树种中右键零件‘打开’|草绘,绘制几何点;。
四杆机构运动分析四杆机构是一种常见的机械结构,由四根杆件组成,通过铰链连接。
四杆机构的运动分析是机械工程中重要的一环,可以帮助我们理解机构的运动特性和用途。
四杆机构有多种形式,如平行四连杆机构、交叉四连杆机构等。
在运动分析过程中,我们通常关注机构的连杆长度、铰链位置和运动轨迹等方面。
首先,我们可以通过连杆长度关系来确定机构的运动特性。
根据连杆长度的不同,四杆机构可以实现直线运动、旋转运动、摇杆运动等。
连杆长度决定了机构的运动范围和速度,可以通过运动学分析方法进行计算和模拟。
其次,铰链位置对机构运动有很大的影响。
铰链的位置决定了杆件之间的相对运动方式,如平行四连杆机构中的对外运动、交叉四连杆机构中的对内运动。
通过确定铰链位置,我们可以进一步分析机构的运动规律和应用。
另外,机构的运动轨迹也是运动分析的重点之一、运动轨迹描述了机构任意一点在运动过程中的位置变化。
通过分析运动轨迹,我们可以得出机构的最大行程、最大速度、加速度等参数,并且可以根据运动轨迹来优化机构的设计,满足特定的工程要求。
在进行四杆机构运动分析时,我们可以利用运动学分析方法,如广义坐标法、矢量法、逆运动学法等。
通过建立运动方程和约束方程,可以得出机构的运动规律和参数。
此外,计算机辅助设计软件和仿真系统也可以帮助我们进行四杆机构的运动分析。
通过输入机构的参数和初始条件,可以模拟机构的运动过程,观察各个杆件的位置、速度和加速度等变化情况。
四杆机构的运动分析对于机械设计和工程实践都具有重要的意义。
它可以帮助我们了解机构的运动特性,优化机构的设计,提高机械系统的性能和效率。
同时,运动分析也是机械工程师在机构设计和动力传动中常用的工具,通过运动分析可以得到有效的设计参数和工作条件。
四杆机构的运动分析是机械工程师必备的技术之一,也是机械工程教育中的重要内容。
平行四连杆机构的原理
一、机构组成
1.固定杆件:用于固定机构的位置,并提供支撑和稳定的作用。
2.连接杆件:主要包括连杆和摇杆两种杆件,用于连接其他杆件并传
递力和运动。
3.节点:杆件连接的交叉点,是机构运动的核心部分。
4.关节:由节点连接的连接方式,常见的有铰链连接和滑动连接。
二、运动分析
1.静态分析:
静态分析主要考虑机构在静止状态下,杆件间的几何关系和力学平衡。
根据杆件的长度和角度,可以得到机构的拉伸和挤压力,从而确定机构在
静止时的结构稳定性。
2.动态分析:
动态分析主要研究机构在运动过程中的速度、加速度等动力学特性。
通过运动学方法,可以推导出连杆的角速度和角加速度,并进一步得到节
点的速度和加速度。
经过大量计算和分析,可以获得机构在不同工况下的
运动轨迹和力学性能。
三、应用领域
1.工业机械领域:
2.机器人领域:
3.汽车工程领域:
平行四连杆机构被应用于汽车悬挂系统和发动机机构中。
汽车悬挂系统使用平行四连杆机构可以实现悬挂装置的平稳运动和减震效果,提高汽车的行驶舒适性和稳定性。
发动机机构通过平行四连杆机构的运动,实现节气门的打开和关闭,控制发动机的进气和排气过程。
四、总结
平行四连杆机构是一种常见的机动装置,通过杆件的相对运动实现机构的工作。
它的原理是通过静态和动态分析来研究机构的运动特性,并应用于工业、机器人和汽车工程等多个领域。
平行四连杆机构的运动稳定性和精度高,具有较广泛的应用前景。
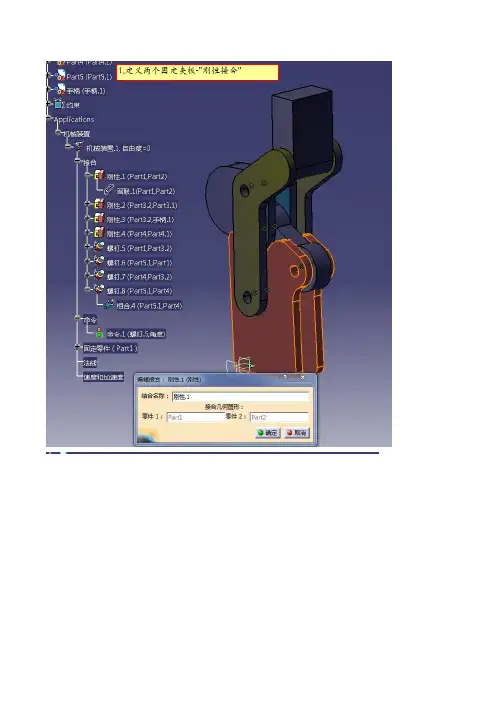
1,定义两个固定夹板-"刚性接合"
2,定义两块连接板-"刚性接合"
3,定义连接板与手柄-"刚性接合"
4,定义连接板-"刚性接合"
5,定义连接板与夹板旋转轴-"螺钉接合",选择驱动角度,点击确定
6,定义夹板与压臂旋转轴-"螺钉接合",不选择驱动角度,点击确定
7,定义两种连接板旋转轴-"螺钉接合",不选择驱动角度,点击确定
8,定义压臂与内连接板旋转轴-"螺钉接合",不选择驱动角度,点击确定
8,固定夹板-选择"固定",点击夹板实体即可跳出可运动模拟的对话窗
9,点击"使用命令进行模拟"-方框内图标,跳出如图对话框.。
分析机械原理四连杆机构的图解法与解析法的优缺点摘要:铰链四杆机构是机械设备中最基本的机构类型之一,文中以它为研究对象建立数学模型,应用MATLAB编程与ADMAS建模分别
对四杆机构进行仿真分析,获得各点的运动曲线,进行对比,两种方法各有所长,分析结果显示直观。
平面四杆机构是连杆机构中最常见的机构组成,由于其结构简单,可承受载荷大,连杆曲线具有多样性等优点,它在工程中得到广泛的运用,设计四杆机构的方法有很多,比如解析法、作图法、实验法,但这些方法都存在一定的缺点,图解法精度差,解析法的计算工作量大,不直观使其在工程运用中受到约束,如果设计平面四杆机构时能显示其运动轨迹从而将图示结果与设计要求进行对比,可以使设计显得更加直观,提高工作效率。
本文以MATLAB、ADMAS为平台,开发了一个平面四杆机构运动轨迹仿真系统,模拟四杆机构的运动仿真,并获得各点的运动轨迹坐标,使设计显得直观,更好的帮助了工程技术人员在机构分析与设计过程中进行优化,提高了工作效率,降低产品开发成本。
第8章第5讲平面四杆机构的设计——解析法平面四杆机构是机械工程中常用的一种机构,它由4个连接杆组成,通过连接杆与铰链的连接方式,能够实现不同形式的运动。
平面四杆机构的设计可以采用解析法,该方法通过解析机构的运动学性质和机构参数,来确定机构的设计参数和结构尺寸。
在平面四杆机构的解析法设计中,首先需要确定机构的运动类型。
根据机构的运动要求和工作环境,可以选择不同的运动类型,如平行移动、旋转、复杂曲线轨迹等。
运动类型的选择将对机构的结构设计和参数确定产生重要影响。
接下来,需要确定机构的工作原理和结构特点。
根据机构的运动类型,可以选择不同的结构形式,如平行四杆机构、向心四杆机构、菱形四杆机构等。
不同的结构形式具有不同的运动学特性和工作原理,需要根据实际需求进行选择。
确定机构的杆件长度和角度。
在机构设计中,杆件的长度和角度是关键的设计参数。
杆件的长度决定了机构的尺寸和工作范围,而杆件的角度决定了机构的运动轨迹和运动特性。
通过分析机构的运动学方程和几何方程,可以确定机构的杆件长度和角度。
确定机构的铰链位置。
铰链的位置决定了杆件之间的连接方式和机构的运动特性。
通过分析机构的力学平衡条件和运动学方程,可以确定机构的铰链位置,使机构能够实现所需要的运动要求。
最后,进行机构的参数优化和结构优化。
根据机构的运动学性能和工作要求,可以对机构的结构参数进行优化,使机构的运动特性更加优秀。
同时,还需要对机构的结构进行优化,提高机构的强度和刚度,确保机构在工作过程中的可靠性和稳定性。
通过解析法进行平面四杆机构的设计,可以使机构的结构和性能更加合理和可靠。
这种设计方法具有简单易行、工程实用性强的特点,是一种常用的机构设计方法。
在实际的机械设计中,可以根据具体的需求和实际情况,采用解析法进行平面四杆机构的设计,以提高机构的性能和工作效果。
四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
——与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)——求解机构所能克服的生产阻力一. 构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.一.构件组的静定条件——垓构件纽斯能列出的強立的力平衞方程式的数目, 应等于构件组中原有力的未知娶素的数目。
独丈的力平衡方程丸的<β =所有力的来知要素的AQO1.运动M中反力的未如娶赛1)转动副——(2个){丈小一才甸一作用点??—转动副中心2)移动副一(2个){大“卜——?方向——垂直移动导路⅞用A——?3)平面高副(】个)Z火小-- ?F R :方⅛——公法线I作用点——A*A2 •构件组的静定条件设某构件组共有"个构件、刃个低副、/个高副>一个构件可以列出3个砂立的力平衡方程,〃个构件共有%个力平衡方程>一个平面低副引入2个力的未知数,竹个低副共引入2刃个力的未知数>一个平面高副引入1个力的未知数,几个低副共引入几个力的未知数* ∣3"2P∕+仇而当构件组仅有低副时,则为;3/1 = 2P z结论:基衣杆组卑满足静走条件二・用图解法作机构的动态静力分析步骤;I)对机构进行运动分析,求出个构件的。
及其质心的心;2) 求出各构件的惯性力,并把它们视为外力加于构件上;3)根据静定条件将机构分解为若干个构件组和平衡力作用的构件:4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析:5)对平衡力作用的构件作力分析。
[ft]如图所示为一往复式运输机的机构运动简图。
已知各构件尺寸、G2、JS2、G5.0、行。
四连杆机构原理四连杆机构是一种常用的机械传动装置,它由四个连杆组成,能够实现复杂的运动轨迹和机械动作。
四连杆机构广泛应用于各种机械设备中,如发动机、机械臂、汽车悬挂系统等。
在本文中,我们将深入探讨四连杆机构的原理及其工作原理。
首先,让我们来了解四连杆机构的结构。
四连杆机构由四个连杆组成,分别是主动连杆、从动连杆和两个曲柄连杆。
主动连杆和从动连杆通过曲柄连杆连接在一起,形成一个闭合的连杆链条。
曲柄连杆通过曲柄轴与主动连杆和从动连杆连接,使得整个机构能够实现旋转和直线运动。
四连杆机构的工作原理是基于连杆的几何关系和运动学原理。
当曲柄轴旋转时,曲柄连杆会带动主动连杆和从动连杆进行相对运动。
通过合理设计连杆的长度和位置,可以实现不同的运动轨迹和机械动作。
例如,可以通过四连杆机构实现直线运动、往复运动、转动运动等多种运动形式。
四连杆机构的运动轨迹是一个复杂的曲线,它可以通过几何分析和运动学原理来进行描述。
在设计四连杆机构时,需要考虑各个连杆的长度、角度和位置关系,以及曲柄轴的旋转速度和方向。
通过合理的设计和计算,可以实现所需的运动轨迹和机械动作。
除了运动轨迹的设计,四连杆机构还需要考虑其工作稳定性和传动效率。
稳定性是指在运动过程中,连杆不会发生过大的振动和变形,保证机构能够正常工作。
传动效率是指机构在能量传递过程中的损耗情况,需要通过合理的设计和选择材料来提高传动效率。
总的来说,四连杆机构是一种重要的机械传动装置,它能够实现复杂的运动轨迹和机械动作。
通过合理的设计和计算,可以实现所需的运动形式和工作效果。
在实际的机械设计中,四连杆机构有着广泛的应用前景,可以满足各种机械设备的需求。
综上所述,四连杆机构的原理和工作原理是基于连杆的几何关系和运动学原理,通过合理的设计和计算,可以实现所需的运动轨迹和机械动作。
在实际的机械设计中,四连杆机构有着广泛的应用前景,能够满足各种机械设备的需求。
四连杆机构运动分析第一篇:四连杆机构运动分析游梁式抽油机是以游梁支点和曲柄轴中心的连线做固定杆,以曲柄,连杆和游梁后臂为三个活动杆所构成的四连结构。
1.1四连杆机构运动分析:图1复数矢量法:为了对机构进行运动分析,先建立坐标系,并将各构件表示为杆矢量。
结构封闭矢量方程式的复数矢量形式:l1eiϕ1+l2eiϕ2=l3eiϕ3+l(1)应用欧拉公式eiθ=cosθ+isinθ将(1)的实部、虚部分离,得 l1cosϕ1+l2cosϕ2=l4+l3cosϕ3⎫⎬(2)l1sinϕ1+l2sinϕ2=l3sinϕ3⎭由此方程组可求得两个未知方位角ϕ2,ϕ3。
解得tan(ϕ3/2)=(B±A2+B2-C2)/(A-C)(4)当要求解ϕ3时,应将ϕ2消去可得222l2=l3+l4+l12-2l3l4cosϕ3-2l1l3cos(ϕ3-ϕ1)-2l1l4cosϕ1(3)ϕ2=arctanB+l3sinϕ3(5)A+l3cosϕ3A=l4-l1cosϕ1其中:B=-l1sinϕ12A2+B2+l32-l2C=2l3(4)式中负号对应的四连杆机构的图形如图2所示,在求得ϕ3之后,可利用(5)求得ϕ2。
图2 由于初始状态ϕ1有个初始角度,定义为ϕ10,因此,我们可以得到关于ϕ1=ϕ10+ωt,ω是曲柄的角速度。
而通过图形3分析,我们得到OA的角度θ=ϕ3-因此悬点E的位移公式为s=|OA|⨯θ,速度v=dvd2sd2θa==2=|OA|2。
dtdtdtπ2-ϕ10。
dsdθ=|OA|,加速度dtdt图3 已知附录4给出四连杆各段尺寸,前臂AO=4315mm,后臂BO=2495mm,连杆BD=3675mm,曲柄半径O’D=R=950mm,根据已知条件我们推出|OO'|+|O'D|>|OB|+|BD|违背了抽油系统的四连结构基本原则。
为了合理解释光杆悬点的运动规律,我们对四连结构进行简化,可采用简谐运动、曲柄滑块结构进行研究。
四杆机构的运动分析一、相关参数在图1所示的四杆机构机构中,已知各构件的尺寸分别为l 1=280mml 2=300mm,l 3=250mm,l 4=500mm,θ1=56̊,ω1=10rad/对其位置s,,速度,和加速度进行分析,并绘制运动图线。
图1 四杆机构二、数学模型的建立1)位置分析对机构进行运动分析,写出机构的的封闭矢量方程。
04321=--+l l l l将各矢量分别向X 轴和Y 轴进行投影,得1133221143322sin sin sin cos cos cos θθθθθθl l l l l l l -=--=-由此方程可得二未知角θ2、θ3。
2)速度分析将上式对时间t 求一次导数,可得到 111333222111333222cos cos cos sin sin sin θωθωθωθωθωθωl l l l l l -=+=+-解之可得ω2、ω3。
上式可写成矩阵形式⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--111113233223322cos sin sin cos sin sin θθωωωθθθθl l l l l l3)加速度分析将上式对时间t 求导,可得加速度关系⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--1111111323332223332223233223322sin cos sin cos cos sin sin cos sin sin θωθωωωωθωθωθωθωααθθθθl l l l l l l l l l 可解的α2、α3。
三、计算程序1、主程序%输入已知数据L1=0.28;L2=0.3;L3=0.25;L4=0.5;e=0;hd=pi/180;du=180/pi;omega1=10;alpha1=0;th1=[0:1/6:2]*pi; %曲柄输入角度从0至360度,步长为pi/6th23=zeros(length(th2),2); %建立一个N 行2列的零矩阵,第一列存放θ_2,第二列存放θ_3 options=optimset('display','off');for m=1:length(th1) %建立for 循环,求解θ_2,θ_3th23(m,:)=fsolve('fourbarposition',[1 1],… %调用fsove 函数求解关于θ_2,θ_3 options,th1(m),L1,L2,L3,L4); %的非线性超越方程,结果保存在th23中endx=L1*cos(th1)+L2*cos(th23(:,1)'); %连杆2的B 端点X 坐标值y=L1*sin(th1)+L2*sin(th23(:,1)'); %连杆2的B 端点Y 坐标值xx=[L1*cos(th1)]; %连杆2的C 端点X 坐标值 yy=[L1*sin(th1)]; %连杆2的C 端点Y 坐标值figure(1)plot([x;xx],[y;yy],'k',[0 L1],[0 0],'k --^',x,y,'ko',xx,yy,'ks') %绘制连杆2的几个位置点title('连杆2的几个位置点')xlabel('水平方向')ylabel('垂直方向')axis equal %XY坐标均衡th1=[0:2/72:2]*pi; %重新细分曲柄输入角度θ_1,步长为5度th23=zeros(length(th1),2);options=optimset('display','off');for m=1:length(th1)th23(m,:)=fsolve('fourbarposition',[1 1],…options,th1(m),L1,L2,L3,L4);endfigure(2)plot(th1*180/pi,th23(:,1),th1*180/pi,th23(:,2)) %绘制连杆2的角位移关于曲柄1的角位移图plot(th2*180/pi,th34(:,1)*180/pi,...th2*180/pi,th34(:,2)*180/pi) %绘制摇杆3的角位移关于曲柄1的角位移图axis([0 360 0 170]) %确定XY边界值grid %图形加网格xlabel('主动件转角\theta_1(度)')ylabel('从动件角位移(度)')title('角位移线图')text(120,120,'摇杆3角位移')text(150,40,'连杆2角位移')w1=10; %设定曲柄角速度for i=1:length(th1)A=[-L2*sin(th23(i,1)) L3*sin(th23(i,2));…L2*cos(th23(i,1)) -L3*cos(th23(i,2))];B=[w1*L1*sin(th1(i)); -w1*L1*cos(th1(i))];w=inv(A)*B;W2(i)=w(1);W3(i)=w(2);endfigure(2)plot(th1*180/pi,w2,th1*180/pi,w3); %绘制角速度线图axis([0 360 -175 200])text(50,160,'摇杆3角速度(\omega_3)')text(220,130,'连杆2角速度(\omega_2)')gridxlabel('主动件转角\theta_1(度)')ylabel('从动件角速度(rad\cdot s^{-1})')title('角速度线图')for i=1:length(th1)C=[-L2*sin(th23(i,1)) L3*sin(th23(i,2));…L2*cos(th23(i,1)) -L3*cos(th23(i,2))];D=[w1^2*L1*cos(th1(i))+w2(i)^2*L2*cos(th23(i,1))-w3(i)^2*L3*cos(th23(i,2));...W1^2*L1*sin(th11(i))+w2(i)^2*L2*sin(th23(i,1))-w3(i)^2*L3*sin(th23(i,2))];a=inv(C)*D;A2(i)=a(1);A3(i)=a(2);endfigure(3)plot(th1*180/pi,a2,th1*180/pi,a3); %绘制角加速度线图axis([0 360 -70000 65000])text(50,50000,'摇杆3角加速度(\alpha_3)')text(220,12000,'连杆2角加速度(\alpha_2)')gridxlabel('主动件角加速度')ylabel('从动件角加速度(rad\cdot s^{-2})')title('角加速度线图')disp '曲柄转角连杆转角-摇杆转角-连杆角速度-摇杆角速度-连杆加速度-摇杆加速度' ydcs=[th1'*180/pi,th23(:,1)*180/pi,th23(:,2)*180/pi,w2',w3',a2',a3'];disp(ydcs)四、程序运行结果及分析图形输出:图2连杆2的几个位置点图3 角位移线图图4角加速度线图图5角加速度线图。
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。