西南交通大学824机械原理历年考研试题
- 格式:pdf
- 大小:5.10 MB
- 文档页数:61
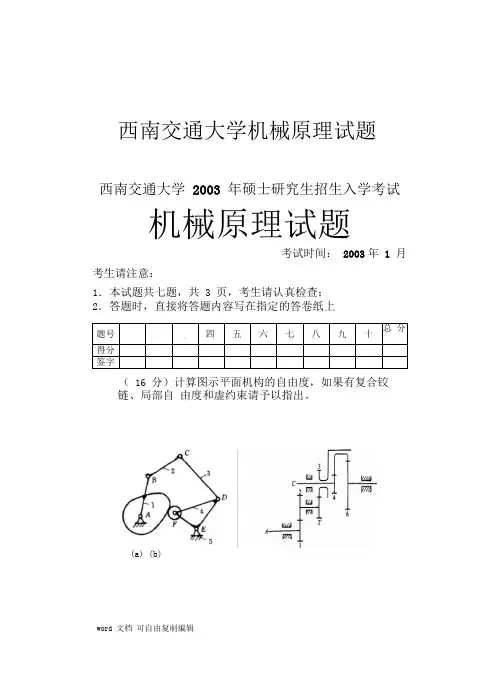
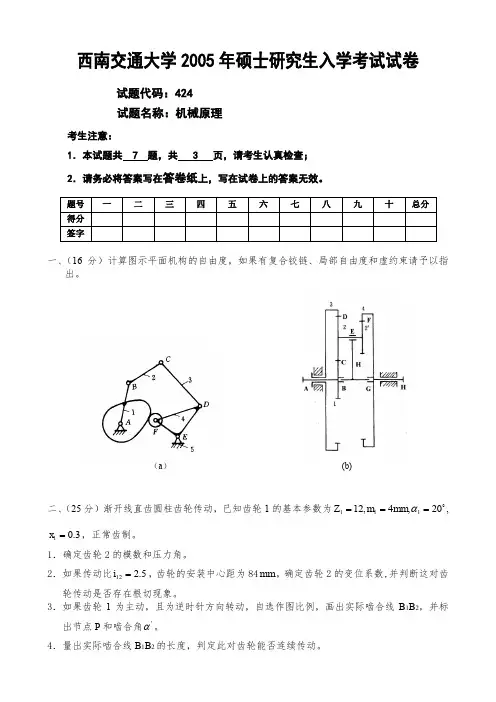
西南交通大学机械原理试题西南交通大学2003 年硕士研究生招生入学考试机械原理试题考试时间:2003年 1 月考生请注意:1.本试题共七题,共 3 页,考生请认真检查;2.答题时,直接将答题内容写在指定的答卷纸上(16 分)计算图示平面机构的自由度,如果有复合铰链、局部自由度和虚约束请予以指出。
(a) (b)word 文档可自由复制编辑24 分)渐开线直齿圆柱齿轮传动, 齿轮的基本参数如下表所示齿数齿顶高系数径向间隙系数模数压力角变位系数齿轮1 10 1 0.25 4mm 20°0.42齿轮2 45 1 0.25 4mm 20°-0.421.推证其瞬时传动比为i12z2,其中z2, z1分别为齿轮2,1 的z1齿数;2.说明这对齿轮是否存在根切现象?3.这对齿轮的标准中心距和正确安装中心距分别是多少?4.分析是否可以通过增大这对齿轮传动的模数来提高其重合度。
三、(15 分)图示机构,图中比例尺为0.002mm / m ,构件 2 为运动输入构件,构件7 为运动输出构件。
1.说出机构中所含基本机构的名称,并说明各个基本机构是由哪些构件组成的;2.分析该机构运动变换的功能,即:能将原动件 2 的什么样的运动转变为构件7 什么样的运动输出;3.设计另外一个机构,实现与图示机构相同的运动变换功能,并画出所设计机构的示意图。
四、(27 分)如图所示,word 文档可自由复制编辑1.设计一个机构能够实现当滑块 A 在力P 的作用下向右运动时,滑块 B 能够克服作用于其上的工作阻力Q 向上运动;2.分析当滑块 A 在任意位置时,以力P为主word 文档可自由复制编辑word 文档 可自由复制编辑动力,所设计机构各个运动副反力的方向(不考虑重力、惯性力 等,并设所有移动副、螺旋副、高副的摩擦角均为 V ,所有转 动副的摩擦圆半径为 V );3.分析在以力 P 为主动力时,所设计机构的自锁条件 五、 ( 27 分 ) 图示轮 系中, 已知各齿轮 的 齿数 z117,z 240,z 3 17, z 4 80, z 4' 60 z550,z5'55, z 6 65, z 6' 1, z 7 60n 1n 3 3000 r min ,转向如图所示1.试确定出蜗轮 7 的转速和转向; 2.若齿轮 5,4',5', 6 均为标准渐开线直齿 圆柱齿轮,模数为 3mm, 且为标注安装。
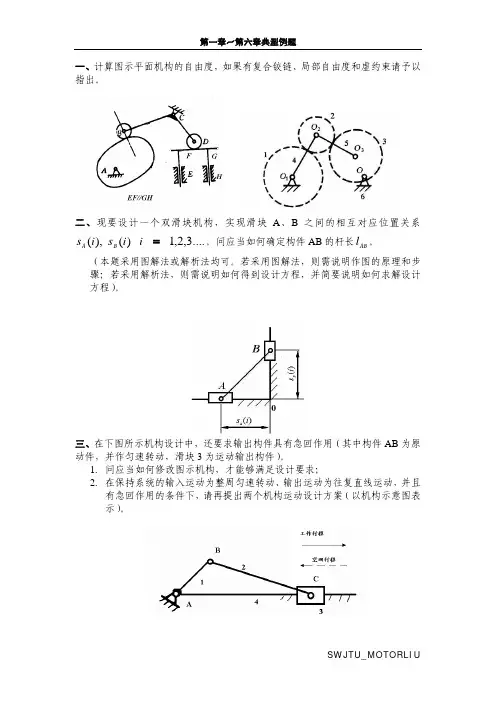
一、计算图示平面机构的自由度,如果有复合铰链、局部自由度和虚约束请予以指出。
二、现要设计一个双滑块机构,实现滑块A、B之间的相互对应位置关系....3,2,1)(),(=iisisBA 。
问应当如何确定构件AB的杆长。
ABl(本题采用图解法或解析法均可。
若采用图解法,则需说明作图的原理和步骤;若采用解析法,则需说明如何得到设计方程,并简要说明如何求解设计方程)。
三、AB为原动件,并作匀速转动,滑块3为运动输出构件)。
1.问应当如何修改图示机构,才能够满足设计要求;2.在保持系统的输入运动为整周匀速转动、输出运动为往复直线运动,并且有急回作用的条件下,请再提出两个机构运动设计方案(以机构示意图表示)。
四、(10分)现要设计一个曲柄摇杆机构。
曲柄AB 为主动件,并且是单向匀速转动。
摇杆CD 的长度为mm l CD 35=,设计要求:摇杆的一个极限位置与机架AD 之间的夹角,并在此位置时机构的传动角,机构的行程速比系数ο45=ϕο60=γ2.1=K 。
问应当如何确定构件AB 的杆长、连杆BC 的长度和铰链点A 、D 之间的距离。
AB l BC l (本题采用图解法或解析法均可。
若采用图解法,则需说明作图的原理和步骤;若采用解析法,则需说明如何得到设计方程,并简要说明如何求解设计方程)。
五、A (12分)图示为糖果包装机的凸轮连杆剪刀机构。
机构的主要功能是:在将糖果沿垂直于纸面的方向送进了一定长度的时候,上刀a 和下刀b 运动,将其剪断。
1、 画出机构的运动简图;2、 如果设计要求是剪断糖果时,上刀a 和下刀b 要在水平位置相重合。
问机构各个构件杆长应当满足的关系是什么?3、 请提出一个与现有机构不同的方案,并画出机构的示意图。
六、20分)题三图所示凸轮机构,凸轮为半径为R 的圆盘。
1、凸轮的基圆半径是多少?0r 2、确定在图示位置时构件1、2之间的速度瞬心;3、进行高副低代,画出机构的低副运动等效机构;4、从动件开始运动时,凸轮的对应点是B 0。
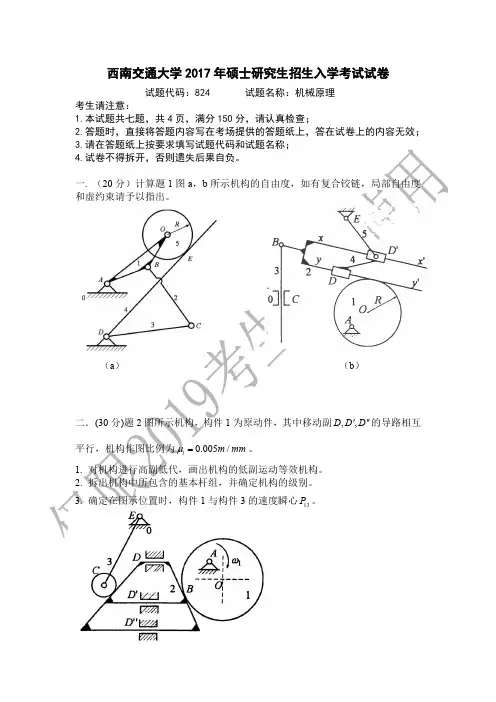
西南交通大学2017年硕士研究生招生入学考试试卷试题代码:824试题名称:机械原理考生请注意:1.本试题共七题,共4页,满分150分,请认真检查;2.答题时,直接将答题内容写在考场提供的答题纸上,答在试卷上的内容无效;3.请在答题纸上按要求填写试题代码和试题名称;4.试卷不得拆开,否则遗失后果自负。
一.(20分)计算题1图a ,b 所示机构的自由度,如有复合铰链,局部自由度和虚约束请予以指出。
(a )(b )二.(30分)题2图所示机构,构件1为原动件,其中移动副,,D D D '''的导路相互平行,机构作图比例为0.005/l m mm μ=。
1.对机构进行高副低代,画出机构的低副运动等效机构。
2.拆出机构中所包含的基本杆组,并确定机构的级别。
3.确定在图示位置时,构件1与构件3的速度瞬心13P 。
三.(25分)题3图所示凸轮机构。
凸轮1为原动件,其上受有驱动力矩1M ,从动件2上受有工作阻力Q F ,凸轮的轮廓半径为R ,偏心距为e 的圆盘,转动副和高副的摩擦角为ϕ,如图中所示,不考虑重力和惯性力。
1.确定凸轮的基圆半径0r 。
2.标出图示位置时从动件2的位移S 以及凸轮机构的压力角α。
3.试确定机构在图示位置时,各个运动副反力的作用线及其方向。
四.(17分)题4图所示为一个螺旋机构,螺旋副为单头右旋螺纹。
螺母上受有驱动力Q F ,方向如图所示。
螺旋副的参数设计可以使得机构在Q F 的作用下,与螺杆刚结的工作盘转动。
设螺旋副的升距为l 。
1.试确定在驱动力Q F 的作用下工作盘的转动方向,并用直线箭头的方法表示出来。
2.如果驱动力为Q F ,工作盘上受有工作阻力矩r M ,螺母的质量为m ,工作盘及螺杆对其轴心线的转动惯量为J ,不计所有运动副中的摩擦。
试以工作盘为等效构件,写出系统的运动方程,并确定工作盘的角速度从0增大到d ω所需要时间。
10,20AB BC BE l mm l l mm ===五.(25分)题5图为一个齿条的示意图。