基于LMS算法的天线波束方向图仿真研究
- 格式:pdf
- 大小:212.33 KB
- 文档页数:4

LMS 算法应用于波束形成的仿真分析1 实验原理LMS 最小均方误差的方法是由最速下降法推导而出。
最速下降法需要求出其梯度的精确值,要求输入信号和期望信号平稳,且 22j xx dx R W R ∇=- (R ak =抽头输入向量u(n)与期望响应d(n)的互相关向量;R xx =抽头输入向量u(n)的相关矩阵;W=抽头权向量)要首先估计xx R 和dx R ,这给具体实现带来很大困难,因此该算法还不是真正意义的自适应滤波算法,但讨论最陡下降法是有意义,由最陡下降法可以很直观地导出一类自适应滤波算法 --- LMS 算法。
LMS 算法的基本思想:调整滤波器自身参数,使滤波器能够自适应地跟踪这种输入信号的变化,实现最优滤波。
当横向滤波器运行在实数据的情况下,该算法大体上可描述为:抽头权向量更新值=老的抽头权向量值+学习速率参数*抽头输入向量*误差信号其中误差信号定义为期望向量与抽头输入向量所产生的横向滤波器的实际向量之差设输入信号为u (n ),LMS 算法理论推导过程如下:滤波器输出y(n)为:10()()N k k y n w u n k -==-∑ 0,1,2...n = (1)由误差定义得:()()-()e n d n y n = (2) 使用最小均方误差法,得代价函数为均方误差为:2[()]J E e n =(3)式(3)中J 是滤波器的系数k w (k = 0,1,2,…)的函数。
通过选择最优的系数,使J 达到最小值。
定义梯度向量为∇J ,∇2[()]()2[()]2[()()]k k k J E e n e n J E e n E u n k e n w w w ∂∂∂====--∂∂∂ 0,1,2...k = (4) 另外,最陡下降迭代方程为:()()()1w n w n J n μ+=-∇ (5) LMS 是直接利用单次采样数据获得的e 2(n )来代替均方误差J (n ),从而进行梯度估计,每次迭代时计梯度估计为:22()()[()()()()()2()()()]()()T T T e n J n d n w n u n u n w n d n u n w n w n w n ∂∂==+-∂∂ 2()()()2()()T u n u n w n d n u n =-2[()()()]()2()()T d n u n w n u n e n u n μ=--=-(6)式(6)代入式(5),得到系数向量自适应迭代法:()()()()()1()2w n w n J n w n e n u n μμ+=-∇=+ (7) 式(7)称最小均方自适应算法LMS 。

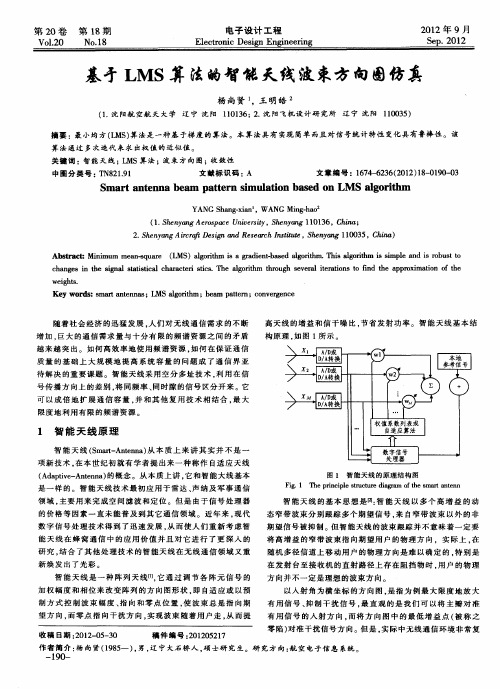
LMS算法波束形成的基础仿真分析LMS (Least Mean Squares) 算法是一种自适应滤波算法,广泛应用于波束形成(Beamforming)技术中。
波束形成是一种利用多个阵元接收或发送信号,通过调整各个阵元的权重来优化信号传输的技术。
在波束形成中,LMS 算法扮演着非常重要的角色,其基础仿真分析对深入理解LMS算法的性能和优缺点具有重要意义。
本文将对LMS算法波束形成进行基础的仿真分析。
首先,我们需要了解LMS算法的基本原理。
LMS算法的目的是通过调整各个阵元的权重,使得接收到的信号在期望方向上增强,而在其他方向上抑制。
LMS算法采用梯度下降法来调整权重,使得输出信号的均方误差最小化。
其迭代更新的公式为:W(n+1)=W(n)+α*e(n)*X(n)其中,W(n)是当前时刻的权重向量,e(n)是期望输出与实际输出之间的误差,X(n)是输入信号的向量。
α是学习率,用于控制权重调整的步幅。
在进行基础仿真分析前,我们需要确定仿真参数。
首先是阵元的数量和间距。
阵元的数量决定了波束的方向性,间距决定了波束的宽度。
接下来是仿真信号的特性,包括入射角度、信号强度等。
此外,还需要确定LMS算法的参数,如学习率等。
这些参数的选择将直接影响到算法的性能。
为了进行仿真分析,我们可以使用MATLAB等工具进行实现。
首先,我们需要生成输入信号。
可以选择不同的波形(如正弦波、方波等)以及不同的入射角度和信号强度。
接下来,我们需要实现LMS算法的迭代更新公式,并利用生成的输入信号进行仿真计算。
在仿真过程中,我们可以观察到LMS算法的收敛速度以及波束形成的性能。
收敛速度是指算法达到最优解所需的迭代次数或时间。
波束形成的性能可以使用波束指向性和波束宽度来衡量。
波束指向性表示波束的主瓣在期望方向上的增益,波束宽度表示波束的主瓣在其他方向上的抑制程度。
通过调整LMS算法的参数,我们可以观察到不同参数对波束形成性能的影响。


第3章 自适应波束形成及算法(3.2 自适应波束形成的几种典型算法)3.2 自适应波束形成的几种典型算法自适应波束形成技术的核心内容就是自适应算法。
目前已提出很多著名算法,非盲的算法中主要是基于期望信号和基于DOA 的算法。
常见的基于期望信号的算法有最小均方误差(MMSE )算法、小均方(LMS )算法、递归最小二乘(RLS )算法,基于DOA 算法中的最小方差无畸变响应(MVDR )算法、特征子空间(ESB )算法等[9]。
3.2.1 基于期望信号的波束形成算法自适应算法中要有期望信号的信息,对于通信系统来讲,这个信息通常是通过发送训练序列来实现的。
根据获得的期望信号的信息,再利用MMSE 算法、LMS 算法等进行最优波束形成。
1.最小均方误差算法(MMSE ) 最小均方误差准则就是滤波器的输出信号与需要信号之差的均方值最小,求得最佳线性滤波器的参数,是一种应用最为广泛的最佳准则。
阵输入矢量为: 1()[(),,()]TMx n x n x n =(3-24)对需要信号()d n 进行估计,并取线性组合器的输出信号()y n 为需要信号()d n 的估计值ˆ()dn ,即 *ˆ()()()()H T d n y n w x n x n w === (3-25) 估计误差为:ˆ()()()()()H e n d nd n d n w x n =-=-(3-26)最小均方误差准则的性能函数为:2{|()|}E e t ξ= (3-27)式中{}E 表示取统计平均值。
最佳处理器问题归结为,使阵列输出()()Ty n w X n =与参考信号()d t 的均方误差最小,即:2{|()|}M i n E e t式(3-28)也就是求最佳权的最小均方准则。
由式(3-26)~(3-28)得:2*{|()|}{()()}E e t E e n e n ξ==2{|()|}2R e []T Hxdxx E d nw r w R w =-+ (3-29)其中,Re 表示取实部,并且:[()()]H xx R E x n x n = (3-30)为输入矢量()x n 的自相关矩阵。
自适应调零天线卫星定位抗干扰算法仿真研究初明阳【摘要】自适应阵列天线是国内外GPS抗干扰研究的主要方向,自适应调零抗干扰算法是成功应用的抗干扰技术之一。
介绍了自适应调零抗干扰的原理,建立了天线阵列的数学模型,基于LMS算法介绍了4个天线单元的自适应调零算法的原理和实现过程,并对算法进行了仿真。
结果显示该算法对单干扰、双干扰及三干扰均有较强的抗干扰能力。
%Adaptive antenna array is the main research direction of GPS anti j-amming home and a -board, and adaptive nulling anti -jamming algorithm is one of the anti-jamming technologies which uses in practice successfully .This paper introduces the adaptive nulling anti-jamming theory and builds the math-ematical model of the antenna array .And based on LMS , the adaptive nulling algorithm for four antenna elements and its implementation are discussed as well .The algorithm is simulated and its results show that it features relatively strong anti-jamming capability to the mono-tone , dual-tone and triple-tone interfer-ence.【期刊名称】《航空兵器》【年(卷),期】2014(000)003【总页数】4页(P44-47)【关键词】卫星定位;抗干扰;自适应调零;LMS算法【作者】初明阳【作者单位】西北工业大学,西安 710072【正文语种】中文【中图分类】TP228.4抗干扰能力一直是制约GPS等卫星导航系统作用发挥的瓶颈,随着卫星定位技术在军事和民用领域的应用越来越广,对卫星定位抗干扰技术的研究也越来越多。