利用开环频率特性分析系统的性能
- 格式:ppt
- 大小:1.66 MB
- 文档页数:20
4.6 频率特性与系统的动态性能4.6 频率特性与系统的动态性能控制系统的频率特性与系统的动态性能之间有密切的关系。
分析控制系统的动态特性,可以利用开环频率特性,也可以利用闭环频率特性。
二阶系统的频率特性与动态性能的时域指标之间又确定的关系,而高阶系统则不存在确定的函数关系。
4.6.1 开环频率特性与系统的动态响应若把系统的开环对数频率特性划分为低频段,中频段和高频段,这三部分对控制系统动态过程的影响是不同的。
开环频率特性的低频段主要影响阶跃响应动态过程的最后阶段,而开环频率特性的高频段主要影响阶跃响应动态过程的起始阶段。
对动态性能影响最重要的是中频段。
所以,常用开环频率的低频段估计系统的稳态性能,而用中频段估计系统的动态响应。
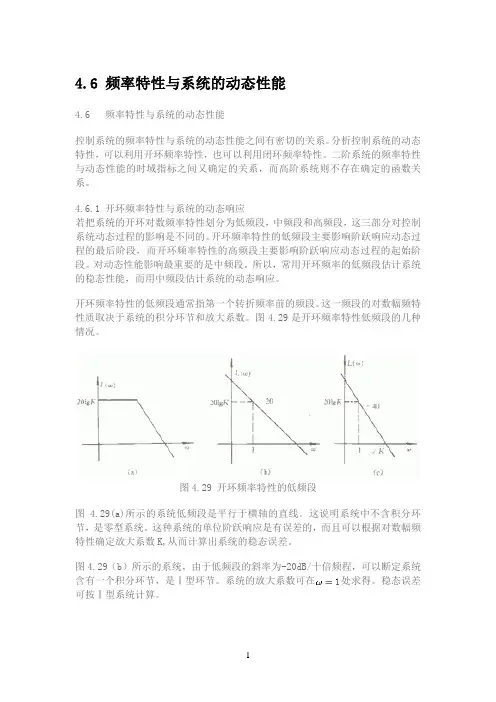
开环频率特性的低频段通常指第一个转折频率前的频段。
这一频段的对数幅频特性质取决于系统的积分环节和放大系数。
图4.29是开环频率特性低频段的几种情况。
图4.29 开环频率特性的低频段图 4.29(a)所示的系统低频段是平行于横轴的直线。
这说明系统中不含积分环节,是零型系统。
这种系统的单位阶跃响应是有误差的,而且可以根据对数幅频特性确定放大系数K,从而计算出系统的稳态误差。
图4.29(b)所示的系统,由于低频段的斜率为-20dB/十倍频程,可以断定系统含有一个积分环节,是Ⅰ型环节。
系统的放大系数可在处求得。
稳态误差可按Ⅰ型系统计算。
图4.29(c)所示的系统是Ⅱ型系统,系统的放大系数可按求取或在对数幅频特性曲线-40dB/十倍频程与轴的交点处求取,此时有。
系统的稳态误差按Ⅱ型系统的稳态误差计算。
开环频率特性曲线的中频段是截止频率附近的频段,截止频率就是使的频率。
即幅值曲线穿越零分贝线的频率。
这一频段,对数幅频特性的形状直接影响到系统的稳定裕量。
从而对系统动态响应过程的主要性能指标产生影响。
用开环频率特性中频段评价控制系统的动态性能,常用到的就是截止频率(穿越频率)和相位裕量。
5.6 利用开环频率特性分析系统的性能在频域中对系统进行分析、设计时,通常是以频域指标作为依据的,但是不如时域指标来得直接、准确。
因此,须进一步探讨频域指标与时域指标之间的关系。
考虑到对数频率特性在控制工程中应用的广泛性,本节将以Bode 图为基点,首先讨论开环对数幅频特性)(ωL 的形状与性能指标的关系,然后根据频域指标与时域指标的关系估算出系统的时域响应性能。
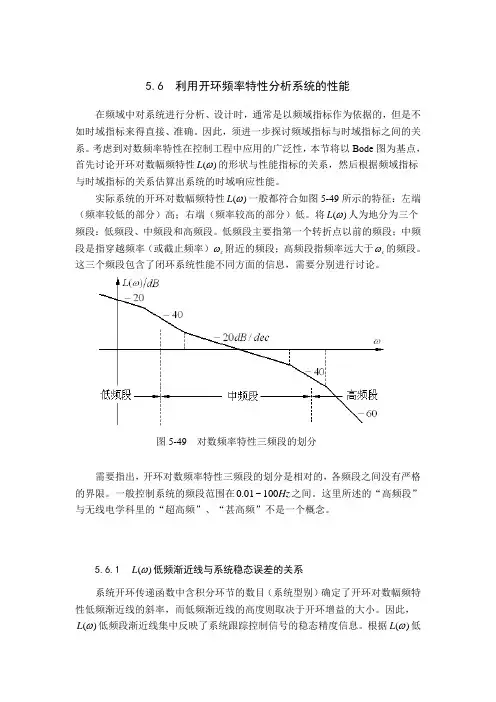
实际系统的开环对数幅频特性)(ωL 一般都符合如图5-49所示的特征:左端(频率较低的部分)高;右端(频率较高的部分)低。
将)(ωL 人为地分为三个频段:低频段、中频段和高频段。
低频段主要指第一个转折点以前的频段;中频段是指穿越频率(或截止频率)c ω附近的频段;高频段指频率远大于c ω的频段。
这三个频段包含了闭环系统性能不同方面的信息,需要分别进行讨论。
需要指出,开环对数频率特性三频段的划分是相对的,各频段之间没有严格的界限。
一般控制系统的频段范围在Hz 100~01.0之间。
这里所述的“高频段”与无线电学科里的“超高频”、“甚高频”不是一个概念。
5.6.1 )(ωL 低频渐近线与系统稳态误差的关系系统开环传递函数中含积分环节的数目(系统型别)确定了开环对数幅频特性低频渐近线的斜率,而低频渐近线的高度则取决于开环增益的大小。
因此,)(ωL 低频段渐近线集中反映了系统跟踪控制信号的稳态精度信息。
根据)(ωL 低图5-49 对数频率特性三频段的划分频段可以确定系统型别υ和开环增益K ,利用第3章中介绍的静态误差系数法可以确定系统在给定输入下的稳态误差。
5.6.2 )(ωL 中频段特性与系统动态性能的关系开环对数幅频特性的中频段是指穿越(或截止)频率c ω附近的频段。
设开环部分纯粹由积分环节构成,图5-50(a )所示的对数幅频特性对应一个积分环节,斜率为dec dB /20-,相角 90)(-=ωϕ,因而相角裕度 90=γ;图5-50(b )的对数幅频特性对应两个积分环节,斜率为dec dB /40-,相角 180)(-=ωϕ,因而相角裕度 0=γ。
8由开环频率特性分析闭环系统在频率特性分析中,我们可以通过开环频率特性来分析闭环系统的性质和性能。
闭环系统是由开环系统和反馈环路组成的,因此我们首先要了解开环系统的频率特性。
开环系统的频率特性主要有两种表示方法:Bode图和Nyquist图。
其中,Bode图将系统的增益和相位的频率响应以对数坐标的形式展示出来,Nyquist图则将系统的频率响应以复数形式表示。
Bode图是一种常用的分析频率特性的方法。
通过绘制系统的增益曲线和相位曲线,我们可以直观地了解系统在不同频率下的表现。
Bode图的横坐标是以对数形式表示的频率,在高频率时值较大,在低频率时值较小。
纵坐标分别表示增益和相位。
Nyquist图是由实部和虚部构成的复平面中的一个图形。
Nyquist图的横坐标是对应于扫频的频率,在频率趋近无穷大时,图形会逼近一个点。
纵坐标表示对应频率下的增益和相位。
通过分析开环系统的频率特性,我们可以得到以下信息:1. 增益裕度:增益裕度是指系统增益与稳定边界之间的差距。
稳定边界是系统增益曲线与-180°相位曲线交点的位置。
增益裕度越大,系统越稳定。
我们可以通过Bode图或Nyquist图来确定系统的增益裕度。
2. 相位裕度:相位裕度是指系统的相位曲线与-180°相位线之间的差距。
相位裕度越大,系统越稳定。
我们可以通过Bode图或Nyquist图来确定系统的相位裕度。
3. 截止频率:截止频率是指系统增益曲线与零增益线交点的频率。
截止频率决定了系统的带宽,即系统能够承载的最高频率。
通过Bode图可以直观地确定系统的截止频率。
4.相位裕度和增益裕度的关系:相位裕度和增益裕度之间存在一定的关系。
当增益裕度增加时,相位裕度通常会减小。
因此,在频率特性分析中,我们需要权衡增益裕度和相位裕度,以实现系统的稳定性和性能。
在闭环系统中,反馈环路能够通过将部分输出信号重新输入到系统中来调节系统的性能,因此闭环系统的频率特性与开环系统有所不同。
主要内容系统闭环频率特性通过频率特性曲线分析稳态性能指标频域动态性能指标频率域特性指标与时域瞬态指标的关系2)()(1)()()(1s H s G s H s G s H +⋅=4环幅频特性。
闭环幅频特性曲线闭环对数幅频曲线二、由闭环频率特性分析系统的时域响应频率特性分析法比时域性能分析简便,且有成熟的图解法可供使用,但频率特性分析是一种概略性的间接方法,在要求系统性能指标直接而具体时,还需从时域响应面进行讨论。
在已知闭环系统稳定的条件下,可根据系统的闭环幅频特性曲线,对系统的动态过程进行定性分析与定量估算。
51、通常的闭环频域有以下几个指标:V零频幅值:ω=0时闭环幅频特性的数值(反映系统静差(误差))V谐振频率ωr:闭环系统频率特性出现谐振峰值时的频率值V谐振峰值M r:系统闭环频率特性幅值的最大值,反映系统的平稳性,并非所有闭环频率特性的中频段有谐振峰值,若出现了谐振峰值,表明系统的阻尼比较小615M r、σ与ζ的关系曲线当相角裕量γ为30o ~60o 时,对应二阶系统的阻尼比ζ为0.3~0.6在ζ≤0.707时,二阶系统的相角裕量γ与阻尼比ζ之间的关系近似为:ζ=0.01γV谐振频率ωr表征系统瞬态响应的速度。
ωr值越大,响应时间越快。
对于弱阻尼系统(ζ较小),谐振频率ωr与阶跃响应的阻尼振荡频率ωd接近。
V截止频率(带宽频率)ωb当系统闭环幅频特性的幅值M(ω)降到零频率幅值的0.707(或零分贝值以下3dB)时,对应的频率ωb称为截止频率。
0~ωb的频率范围称为带宽它反映系统的快速性和低通滤波特性。
V剪切率ωc幅值=1时的频率ωc,称为剪切率,它既反映系统的相角裕度(相角裕度大,剪切率应较平缓),又表征系统从噪声中辨别信号的能力(剪切率平缓,带宽ωb大,对高频噪声的抑制不利)。
17应注意,剪切频率ωc处斜率平缓(如以-20dB/dec过0dB线)时,系统相角裕量大;而斜率陡峭时,说明具有负相角的环节集图5 剪切率中叠加于此,带来大的负相角,如图5所示,则易造成系统不稳定。
8由开环频率特性分析闭环系统开环频率特性分析是指对闭环控制系统的开环传递函数进行频率域分析,以了解系统在频率上的响应特性。
通过开环频率特性分析可以得到系统的幅频特性和相频特性,有助于设计和优化闭环控制系统。
一、开环传递函数的形式闭环系统的开环传递函数可以用分子多项式与分母多项式的比值表示。
设闭环系统的开环传递函数为G(s),则有:G(s)=K(s)/(1+K(s)H(s))其中,K(s)为控制器的传递函数,H(s)为被控对象的传递函数。
控制器可以采用比例、积分、微分等控制算法。
被控对象可以是线性或非线性系统。
二、幅频特性幅频特性是指开环传递函数G(s)的幅值与频率之间的关系。
为了分析幅频特性,可以将G(s)表示为幅度与相位的乘积形式:G(s)=A(s)e^jθ(s)其中,A(s)为幅值,θ(s)为相位。
1.幅频曲线幅频曲线是表示幅值与频率之间关系的曲线。
在频率为0时,幅值为A0;随着频率的增大,幅值逐渐下降,直到达到临界频率Fc,幅值下降到A0的1/√2倍;随着频率继续增大,幅值持续下降,最终趋近于0。
2.切斜率切斜率是指幅频曲线上两点之间的斜率。
在低频段,切斜率较小;在高频段,切斜率较大。
切斜率可以用于衡量系统的动态响应速度,切斜率越大,系统的动态响应越快。
三、相频特性相频特性是指相位与频率之间的关系。
相位是指输入信号与输出信号之间的相位差。
1.相频曲线相频曲线是表示相位与频率之间关系的曲线。
在低频段,相位变化较小,接近于0;在高频段,相位变化较大,最终趋近于-180度。
2.相移相移是指相位差的变化。
相移可以用来衡量系统的时滞情况,相位差越大,系统的时滞越大。
四、开环频率特性分析方法1. Bode图Bode图是一种常用的频率特性分析方法,可以直观地表示系统的幅频特性和相频特性。
Bode图采用对数坐标,将幅度(单位为dB)和相位(单位为度)作为纵坐标,频率(单位为Hz)作为横坐标。
2. Nyquist图Nyquist图是一种复平面上的频率特性分析方法,可以直观地显示系统的稳定性。
5.9 利用开环频率特性分析系统的性能(上)1.L(ω)低频渐近线与系统稳态误差的关系2. L(ω)中频段特性与系统动态性能的关系3. L(ω)高频段特性与系统抗高频干扰能力的关系在频域中对系统进行分析、设计时,通常是以频域指标为依据的,但是频域指标不如时域指标直观、准确,因此,需进一步讨论频域指标与时域指标之间的关系。
考虑到对数频率特性在控制工程中应用的广泛性,本节以伯德为基本形式,首先讨论开环对数幅频特性L(w)的形状与性能指标之间的关系,然后在下一节,根据频域指标与时域指标间的关系估计出系统的时域响应性能。
实际系统的开环对数幅频特性L(w)一般都符合如图所示的特征。
左端(频率较低的部分)高,右端(频率较高的部分)低。
将L(w)人为地分为三个频段:低频段、中频段和高频段。
三频段理论低频段:主要指第一个转折频率以左的频段。
中频段:指截止频率w c附近的频段。
高频段:指频率远大于w c的频段。
开环对数频率特性三频段的划分是相对的,各频段之间没有严格的界限。
1.L(ω)低频⇔系统稳态误差e ss低频段对应的传递函数:低频段特性可以确定系统型别v和开环增益K。
在闭环稳定的情况下,利用静态误差系数法可以计算稳态误差essv越高,K越大,e ss越小。
此时,对应的曲线位置相对较高,曲线的形状比较陡。
2. L(ω)中频段⇔系统动态性能(σ%, t)s最小相角系统L(ω) 曲线斜率与相频特性的对应关系希望L(w) 以-20dB/dec斜率穿越0dB线,并保持较宽的频段。
例1 对数频率特性和幅相特性曲线。
)254)(1()1.0(8)(22+++++=s s s s s s s G ⎥⎥⎦⎤⎢⎢⎣⎡+⋅+⎪⎭⎫ ⎝⎛+++=15545)1()11.0(032.022s s s s s s 对数幅频特性曲线的斜率越大,对应的对数相频特性的角度越大。
例2 最小相角系统j (w ) ~ L (w )之间的对应关系( K =1)]1)5()5([)1()(221+++=s s s s K s G ]1)20()20([)1()(223+++=s s s s K s G ]1)10()10([)1()(222+++=s s s s K s G 对数幅频特性曲线的斜率越大、频带越宽,对应的对数相频特性的角度越大。