行星齿轮传动机构在联合收割机割刀驱动上的应用
- 格式:pdf
- 大小:85.17 KB
- 文档页数:2



联合收割机收割台结构特点及常见故障的排除联合收割机收割台是联合收割机的核心部分之一,它通常由多个组件组成,包括刀片、驱动轮、切割螺栓、传动链、拉杆等。
下面是联合收割机收割台的结构特点:1. 刀片:联合收割机收割台通常采用一组可调整和可拆卸的刀片来进行切割工作。
刀片通常是由高强度的钢材制成,在切割过程中可以灵活地调整刀片的位置和角度,以适应不同农作物的收割需求。
2. 驱动轮:驱动轮是联合收割机收割台的核心部件之一。
它通常由多个齿轮组成,可以通过电机或液压系统驱动,以驱动刀片实现切割作业。
3. 切割螺栓:联合收割机收割台上的切割螺栓通常由高强度的合金钢材制成,可以承受高强度的切割力,并具有很高的耐磨性。
切割螺栓的结构和材料都需要经过精心的设计和测试,以确保其能够长期使用而不会发生损坏。
4. 传动链:传动链是联合收割机收割台上的另一个重要部分,它一般由多个链环组成,通过链轮来传动刀片和其他组件的运动。
传动链需要具有很高的强度和耐磨性,以承受高强度的切割力和运动力。
5. 拉杆:拉杆是用来支撑联合收割机收割台的重要部件,它通常由高强度钢材制成,可以有效地支撑收割台的运动和负载。
二、常见故障的排除联合收割机收割台在使用过程中,可能会遇到一些常见故障,这些故障常常会导致切割效率低下和设备损坏。
下面是几种常见故障及其解决方法:1. 切割螺栓损坏:切割螺栓是联合收割机收割台上最容易损坏的部件之一。
如果切割螺栓受到过多的切割力,或者材料质量不好,就会很容易发生损坏。
解决这个问题的方法是更换好质量的切割螺栓,并避免超负荷使用。
2. 刀片损坏:刀片在长时间的工作过程中,容易因为磨损或者因为碰撞损坏。
发生这种情况时,需要及时更换刀片,并且定期对刀片进行检查和维护。
3. 驱动系统故障:驱动系统故障通常是由于电机或液压系统出现故障导致的。
解决这个问题的方法是检查电机或液压系统的电路、传感器等部件,保证其正常工作。
4. 传动链断裂:传动链因为长期摩擦,容易出现断裂现象。
联合收割机割刀行星齿轮传动机构设计李陆俊;吕新民【摘要】通过行星齿轮传动机构和曲柄连杆、摆环传动机构的优缺点对比,针对曲柄迮杆、摆环传动机构使刀杆受到侧向的分力,容易导致刀杆断裂和故障率高等缺点,建立行星齿轮机构输出端运动方程,并进行运动分析.得到了割刀实现往复直线运动的条件.根据这个条件和实际情况,设计了东方红4LZ-2.5联合收割机的行星齿轮传动机构,经接触疲劳强度和弯曲疲劳强度校核,该传动机构安全可靠.为联合收割机传动机构的改进提供可行方案.【期刊名称】《农机化研究》【年(卷),期】2011(033)004【总页数】4页(P67-70)【关键词】行星齿轮机构;运动分析;东方红4LZ-2.5联合收割机【作者】李陆俊;吕新民【作者单位】西北农林科技大学机械与电子工程学院,陕西杨凌712100;西北农林科技大学机械与电子工程学院,陕西杨凌712100【正文语种】中文【中图分类】S225.30 引言联合收割机割刀做往复直线运动,可采用多种传动机构,常见的有曲柄连杆机构、摆环机构和行星齿轮机构等[1]。
这些传动机构的共同特点是把回转运动变成割刀的平面往复直线运动,其中曲柄连杆机构和摆环机构的共同缺点是刀杆受到垂直或水平方向的分力,导致刀杆易振动和断裂。
由于该结构上的缺陷,故障率居高不下。
行星齿轮式传动机构的主要特点是刀杆不受垂直或水平方向的侧向分力作用,因而磨损小,振动也小,同时结构紧凑,工作稳定可靠。
尽管由于制造精度高和结构复杂等特点,行星齿轮传动机构在联合收割机上应用较少,但由于其具有可靠性高的优点,近年来已受到联合收割机生产厂家的重视。
开发与应用渐开线行星齿轮机构代替传统摆环箱已成为一种发展趋势[2]。
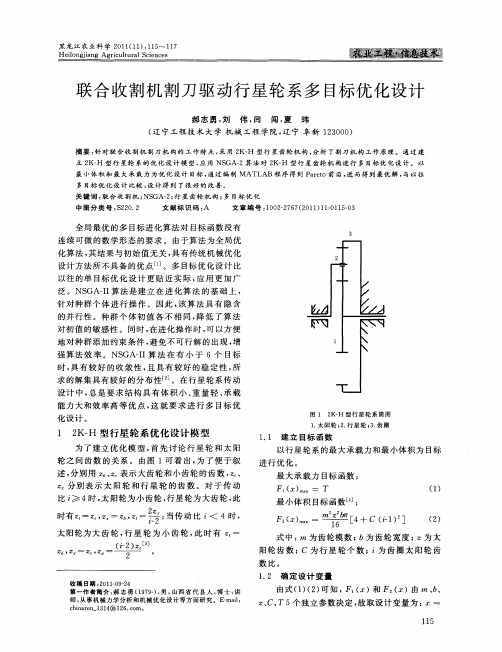
1 行星齿轮传动机构的运动分析行星齿轮式割刀传动机构由转臂(1)、行星齿轮(2)、曲柄(3)和固定齿圈(4)等组成,见图1所示。
当转臂绕轴心回转时,行星齿轮在固定齿圈上滚动,从而曲柄带动割刀做往复直线运动。
了解行星齿轮传动系统及其在机械设备中的应用行星齿轮传动系统是一种常用的机械传动装置,它具有结构紧凑、传动效率高、承载能力强等特点,广泛应用于各种机械设备中。
本文将介绍行星齿轮传动系统的原理、结构和在机械设备中的应用。
行星齿轮传动系统的原理基于行星齿轮副的工作原理。
行星齿轮副由太阳轮、行星轮和内齿圈组成。
太阳轮作为输入轴,通过输入转矩作用于行星轮上的行星齿轮,使之绕太阳轮自转。
行星轮与内齿圈啮合,通过行星轮的旋转驱动内齿圈旋转,从而将转矩输出到外部设备。
行星齿轮传动系统具有多级传动的能力,可以实现大范围的速比变换。
行星齿轮传动系统的结构紧凑,可以在有限的空间内实现较大的速比变换。
行星齿轮副的工作原理决定了其传动效率较高,通常可以达到95%以上。
此外,行星齿轮传动系统还具有传动稳定性好、传动承载能力强等优点。
由于其结构和性能的优势,行星齿轮传动系统被广泛应用于各种机械设备中。
首先,行星齿轮传动系统常用于汽车变速器中。
汽车变速器是用于改变汽车行驶速度的重要装置,而行星齿轮传动系统可以提供多种速比选择,满足汽车在不同行驶状态下的需求。
行星齿轮传动系统在汽车变速器中具有转矩传递平稳、可靠性好的特点,可以使汽车行驶更加顺畅。
其次,行星齿轮传动系统也广泛应用于工程机械中。
工程机械常常需要承受高强度的工作负荷,对传动系统的可靠性和承载能力提出较高要求。
行星齿轮传动系统由于其结构的特点,可以实现较高的承载能力,更好地适应工程机械的工作环境。
同时,行星齿轮传动系统还可以提供多级传动,实现更大范围的速比变换,满足工程机械在不同工作状态下的需求。
此外,行星齿轮传动系统还常常应用于航空航天设备中。
航空航天设备对传动系统的要求十分苛刻,需要传动系统具有低重量、高刚度和高可靠性等特点。
行星齿轮传动系统由于其结构紧凑、传动效率高等优点,可以满足航空航天设备对传动系统的要求。
行星齿轮传动系统广泛应用于航空航天设备中的电动机、减速器等部分,并取得了良好的应用效果。
联合收割机往复式割刀传动机构运动学分析1、机构的组成及工作原理联合收割机割刀的传动机构主要有三种,曲柄滑块机构、摆环机构和行星齿轮机构。
本设计采用曲柄滑块机构,结构简单,制造加工方便,机构的简图如图1所示。
该机构属于曲柄摇杆一播秆滑块机构,ABC是曲柄摇杆机构,DEF为摇杆滑块机构.当曲柄均匀回转时,割刀动刃片作往复运动,完成切割任务.该机构属于空间机构,推杆与摆块及摆块轴承座链接为球头铰链或球面轴承。
图1.割刀传统系统结构简化图2数学模型的建立2.1主要参数的确定查农业机械设计手册,选取要设计的往复式切割器主要技术参数如下: 切割行程76.2mm ,曲柄转速468r/min ,割刀平均速度1.19m/s 。
摇杆尺寸拟定为L1=100mm ,曲柄尺寸拟定为L2=300mm ,摆块尺寸拟定为R2=100mm ,推杆L2=300mm ,R1=90mm ,则α=25.05°,2α=50.10°,L0=42.333mm 。
2.2数学模型的建立2.2.1矢量方程OA +AB =OC +CB =OB (1)OC +CD =OD (2)OD +DE =OE (3)1.2.2位移方程)4(0sin cos ⎪⎩⎪⎨⎧=⋅=⋅=A O A O A z t L y tL x ωω由(1)式得)5(cos 0sin sin cos 32223222⎪⎩⎪⎨⎧⋅+==⋅+=⋅+=⋅+=βαβαR z z L y yR x L x x C B A B C A B由(5)得2222tan AAy L y -=α,2α在1、4象限,2α可求,将2α代入(5)得sin 3β=T R L x C A =⋅+-222cos x α由矢量方程(2)得⎪⎪⎩⎪⎪⎨⎧-⋅+==-⋅+=)2cos(0)2sin(x 3131πβπβR z z y R x C D D C D (6)由(3)得11311]cos )2[cos(sin L R απβγ--=(7) E 点坐标为 ⎪⎩⎪⎨⎧+==⋅+=1110cos L z z y R x x D EE C E α(8) 2.2.3速度方程⎪⎩⎪⎨⎧=⋅⋅=⋅⋅-=0cos sin x 00A A A z t L yt L ωωωω(9) ⎪⎩⎪⎨⎧⋅⋅-==⋅⋅+=⋅⋅=⋅⋅-=332222332222sin 0cos cos sin ββααββαα R z L y yR L x x B A B A B (10) 由(10)中的2式得222cos αα⋅-=L y A (11) 将(11)式代入(10)式得322322223cos tan cos sin βαβααβ⋅⋅+=⋅⋅⋅-=R y x R L x A AA (12) ⎪⎪⎩⎪⎪⎨⎧-⋅⋅-==-⋅⋅=)2sin(0)2cos(313313πββπββR z yR x D D D (13) 113311cos )2sin(γπββγ⋅-⋅=L R (14)⎪⎩⎪⎨⎧⋅⋅-===111sin 00γγ L zz yx D E E E (15) 1.2.4加速度方程⎪⎩⎪⎨⎧=⋅⋅-=⋅⋅-=0sin cos x 2020A AA z t L y t Lωωωω(16)⎪⎩⎪⎨⎧⋅⋅-⋅⋅-==⋅⋅-⋅⋅+=⋅⋅-⋅⋅=⋅⋅-⋅⋅-=323233222222223232332222222cos sin 0sin cos sin cos cos sin ββββααααββββααααR R z L L y y R R L L x x B A B A B (17) 由(17)得22322222cos sin αααα⋅-+⋅⋅=L y y L A B (18) 3232323cos sin ββββ⋅⋅⋅-=R R x B (19) ⎪⎪⎪⎩⎪⎪⎪⎨⎧-⋅⋅--⋅⋅-==-⋅⋅--⋅⋅=)2cos()2sin(0)2sin()2cos(32313133231313πββπββπββπββ&&&&&&&&&&&R R z y R R x D D D (20) 1112113313311cos sin )2sin()2sin(γγγπββπββγ⋅⋅⋅+-⋅⋅--⋅=L L L R (21)⎪⎩⎪⎨⎧⋅-⋅⋅-===1211111cos sin 00γγγγL L z z y x D E E E (22)。
行星齿轮传动机构在联合收割机割刀驱动上的应用
黄丙申1,刘丽影1,于占国2
(1.黑龙江省农垦科学院,佳木斯154007;2.黑龙江省江川农场)
摘要:从工作原理上分析了一种用于联合收割机割刀传动的新型渐开线行星齿轮传动机构,并与目前常用的摆环箱机构进行了对比。
关键词:联合收割机;割刀;传动;行星齿轮;机构
1 引言
联合收割机切割器作往复运动,可采用多种传动机构,常见的有曲柄连杆机构、摆环机构、曲柄滑槽机构等。
其中利用摆环机构生产的摆环箱由于运动平稳、传动功率大等优点已被广泛应用于大型联合收割机上,其工作原理是利用摆环、摆叉和偏心原理将圆周运动变成平面往复运动。
随着技术的不断发展,人们在追求联合收割机高性能的同时,更加关注产品的可靠性。
渐开线行星齿轮传动机构在可靠性方面的优势近年来已受到联合收割机生产厂家的重视,开发、应用渐开线行星齿轮传动机构代替传统摆环箱已纳入了收割机生产企业的日程。
2
工作原理
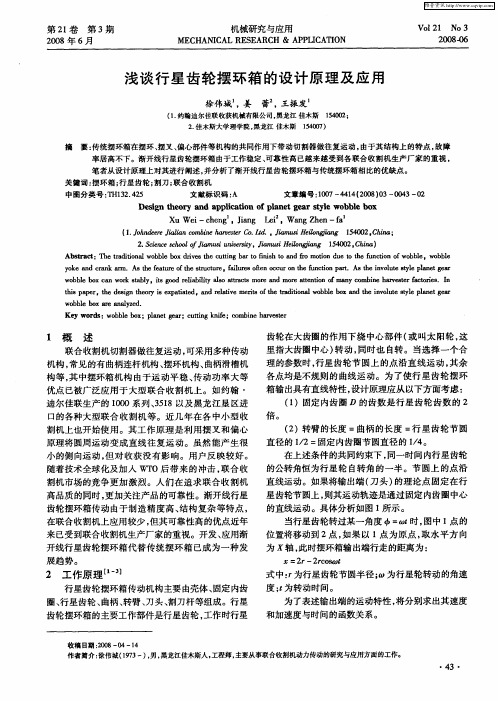
图1 割刀行星齿轮传动机构示意图
1.固定内齿圈
2.转臂
3.行星齿轮
4.曲柄
5.输出端
行星齿轮传动机构主要由壳体、固定内齿圈、行星齿轮、曲柄、转臂、刀头、割刀杆等组成(参见图1),其主要工作部件是行星齿轮。
工作时行星齿轮在大齿圈的作用下绕中心部件(或叫太阳轮,这里指大齿圈中心)转动,同时也自转。
当选择一个合理的参数时,行星齿轮节圆上的点沿直线运动,其余各点均是不规则的曲线运动。
为了使行星齿轮传动机构的
输出具有直线特性,必须保证两点:①固定内齿圈的齿数是行星齿轮齿数的2倍;②转臂的长度=曲柄的长度=行星齿轮节圆半径=固定内齿圈节圆半径的1/2。
在这两个条件的共同约束下,同一时间内行星齿轮的公转角恒为行星齿轮自转角的一半;节圆上的点沿直线运动。
如果将输出端(刀头)的理论点固定在行星齿轮节圆上,其运动轨迹则是通过固定内齿圈中心的直线运动。
当行星齿轮转过一角度O 时(O =k t ),行星齿轮中心由A 点转到B 点,图中a 点的位置将移动到b 点。
如果以a 点为原点,取水平方向为x 轴,此时该传动机构输出端移动的距离为:x =2r -2r cos k t 式中:r ——行星齿轮节圆半径
k ——行星轮转动的角速度t ——转动时间。
为了表述输出端的运动特性,我们分别求出其速度和加速度与时间的函数关系。
v =d x /d t =2r k sin k t
a =d v /d t =2r k 2
cos k
t 从速度和加速度与时间的函数关系上可以看出,其运动特性随时间呈正弦或余弦曲线规律运动。
这与偏置式曲柄连杆机构运动特性基本相同。
3 整体设计时应考虑的几个因素
3.1 割刀往复运动频率
该行星齿轮传动机构动力由皮带轮传给主动轴,主动轴通过一对锥齿轮把动力传递给行星齿轮,通过输出端将动力以直线运动的方式输出到割刀上。
为了保证切割器工作时的频率要求,设计时在充分考虑结构配置的同时,应严格计算输入皮带轮的传动比和锥齿轮的传动比。
3.2 装配要求
要想使输出具有水平直线特性,装配时应考虑
31
行星齿轮传动机构在联合收割机割刀驱动上的应用 黄丙申 刘丽影 于占国
2ZB4型杯式钵苗移栽机*
冯福海,陈东升,冯艳辉
(黑龙江省农垦科学院,佳木斯154007)
摘要:介绍了2ZB4型杯式钵苗移栽机的主要技术性能、主要技术参数、整机结构与工作原理和部件调整及使用维护要求。
关键词:玉米;移栽机;杯式;钵苗
2ZB4型杯式钵苗移栽机是根据农作物移植的农艺要求设计开发的一种多用途、悬挂式新型农具,可用于玉米、甜菜、烟草、蔬菜和花卉等移栽作业。
1 主要技术参数
作业效率:0.24~0.25hm2/h
作业幅宽:4行
栽植株距:20~32cm
栽植深度:4~7cm
施肥深度:10~15cm
直整度:>95%
喂苗方式:人工投入
栽植手:4人
配套动力:20.6kW以上拖拉机
牵引速度:0.9~ 1.8km/h
驱动方式:地轮驱动
开沟器形式:长划刀式
覆土器形式:平刮板式
收稿日期:20020325
* 农业部“九五”攻关项目
排肥器形式:外槽轮式
镇压器形式:倾斜圆柱轮式
栽植器形式:回转塑杯式
整机质量:1200kg
外形尺寸:1860mm×3200mm×1160mm
(长×宽×高)
2 整机结构及工作原理
2ZB4型杯式钵苗移栽机主要由悬挂机构、主梁、地轮、坐椅、肥箱、秧盘、喂入机构(苗杯)、送苗机构、施肥杆齿、栽苗开沟器、镇压器、覆土器等部件组成,其基本结构如图1所示。
2ZB4型杯式钵苗移栽机的4个移栽单组,结构原理完全相同,均平行地与主梁连接。
随着机器的前进,栽植手将钵苗分别连续地投入喂入杯中,每个杯中1棵。
钵苗随同苗杯做匀速圆周运动,当运动到送苗器上方时,闭合的苗杯在凸轮机构和拉伸弹簧的共同作用下快速打开,钵苗通过送苗筒自由落入开沟器底部。
在开沟器两侧壁板和底板的扶托下做暂短停留,然后由送苗器送出开沟器。
借助送苗器的推
以下两个条件:①输出端中心必须位于行星齿轮节圆上;②在传动机构整体与收割机整体配置固定的前提下,确保输出端运动方向与割刀运动方向一致,以便减少刀片的磨损。
3.3 齿轮
行星齿轮传动机构动力传递主要靠齿轮,从割刀的运动形式上可以看出,该传动机构所受的力主要是冲击载荷,这就要求齿轮工作过程中的啮合间隙要合理,而且齿轮要有相当高的承载能力。
实际上,由于零件加工中的误差、工作中的热变形、装配时的误差等,齿轮很难达到理想的啮合状态。
所以齿轮强度对该传动机构可靠性的影响尤为重要。
该设计中,齿轮精度均按国家标准8级要求,齿轮齿面硬度均要求HRC52~58。
4 应用效果
a.约翰迪尔公司几年前将渐开线行星齿轮传动机构做成传动箱体应用到联合收割机上,经实践证明,该种传动机构除具有传动功率大、可靠性高等明显优点外,与传统式摆环箱相比具有重量轻、体积小、利用空间小等特点,更便于与联合收割机配套。
b.渐开线行星齿轮传动机构输出端更能保证割刀作往复直线运动而无有害的侧向运动,因而振动小,能够减轻刀片的磨损,可以提高割刀运动速度,对切割粗茎秆植物更为有利。
(005)
32现代化农业 2002年第8期(总第277期)。