行星齿轮传动机构
- 格式:ppt
- 大小:14.49 MB
- 文档页数:112
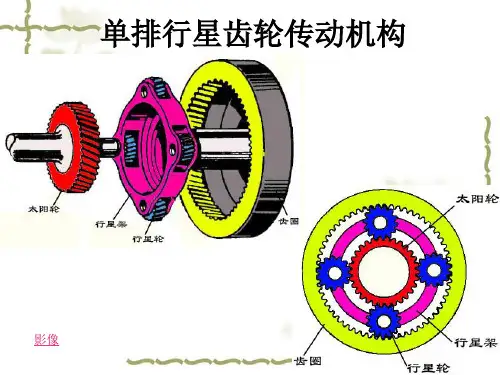
行星齿轮机构的三个基本元件
行星齿轮机构是一种常见的传动机构,由三个基本元件组成,分别是行星轮、太阳轮和内齿圈。
1. 行星轮:行星轮是行星齿轮机构中的一个轮子,通常固定在一个轴上并绕着太阳轮旋转。
行星轮通常有多个齿,与太阳轮和内齿圈相配合,实现传动。
2. 太阳轮:太阳轮是行星齿轮机构中的另一个轮子,通常位于中间,不旋转而是固定在机构的中心轴上。
太阳轮与行星轮和内齿圈相配合,实现传动。
3. 内齿圈:内齿圈是行星齿轮机构中的第三个轮子,通常是一个环形结构,内部有齿。
内齿圈不旋转而是固定在机构中,与太阳轮和行星轮相配合,实现传动。
这三个基本元件相互配合,构成了行星齿轮机构,可以实现高效的传动和变速。
行星齿轮机构广泛应用于各种机械和设备中,如汽车变速器、机床传动装置等。

双排行星齿轮工作原理
双排行星齿轮是一种常见的齿轮传动机构,它由两个行星齿轮和一个太阳齿轮组成。
它的工作原理主要包括以下几个方面:
1. 太阳齿轮:太阳齿轮位于两个行星齿轮之间,它与传动输入轴相连。
当太阳齿轮转动时,会产生动力输入。
2. 行星齿轮:行星齿轮是两个,并且它们的齿轮数相同。
行星齿轮上有多颗齿与太阳齿轮咬合,行星齿轮可以绕自身轴线旋转,并且可以绕太阳齿轮转动。
3. 轴:行星齿轮的轴即为输出轴,通过与齿轮连接,实现输出扭矩和转速。
工作原理如下:
1. 开始时,太阳齿轮和行星齿轮静止不动。
2. 动力输入:当太阳齿轮开始转动时,由于行星齿轮与太阳齿轮的咬合,行星齿轮也会开始绕太阳齿轮旋转。
3. 输出:行星齿轮的旋转会带动输出轴一起旋转,从而实现输出扭矩和转速。
4. 变速:通过改变太阳齿轮的转速和行星齿轮的咬合方式,可以实现不同的变速比。
需要注意的是,双排行星齿轮传动具有高效、扭矩稳定、结构紧凑等优点,广泛应用于各种机械传动系统中。
nwg型行星轮系的定义和特点NGW型行星轮系是一种常见的齿轮传动装置,它由两级行星齿轮机构组成。
NGW代表的含义是N(Planetary)G(Gear)W(Wheel),意为行星齿轮机构。
这种传动装置广泛用于各种重型机械设备中,如工程机械、矿山设备、冶金设备等。
NGW型行星轮系的特点如下:1.高承载能力:NGW型行星轮系采用多级行星齿轮机构,能够实现高传动比的同时保持较高的承载能力。
这使得它非常适合用于重载工况下的传动装置,如大型矿山机械等。
2.高传动效率:NGW型行星轮系的传动效率较高,一般在95%以上。
这是由于多级行星齿轮机构能够减小传动过程中的动力损耗,同时行星齿轮采用直接啮合,减少传动链条的摩擦损耗。
3.多级传动:NGW型行星轮系通常由两级行星齿轮机构组成,每个机构又包括一个太阳轮、多个行星轮和一个内齿轮。
每个机构的行星轮都与太阳轮和内齿轮啮合,形成一个独立的传动单元。
多级传动可以实现更大的传动比,并且能够分担承载能力,提高传动装置的可靠性。
4.结构紧凑:NGW型行星轮系的结构紧凑,体积小,重量轻。
这使得它在有限的空间内可以实现较大的传动比,适用于空间有限的设备。
5.平稳运行:NGW型行星轮系的传动过程中存在多个齿轮啮合,这可以分散传动过程中的动力冲击和振动,实现平稳的运行。
这使得NGW 型行星轮系在传动精度要求较高的装置中得到广泛应用。
6.可靠性高:NGW型行星轮系的结构简单,零部件较少,因此具有较高的可靠性和寿命。
它的内齿轮一般采用高强度、高硬度的材料制造,能够承受较大的载荷,不易磨损和变形。
总之,NGW型行星轮系是一种承载能力高、传动效率高、结构紧凑、运行平稳、可靠性高的传动装置。
它广泛应用于各种重型机械设备中,有效提高了机械设备的性能和可靠性。
2K—H型行星齿轮机构传动的啮合效率分析H型行星齿轮机构是一种新型的传动机构,具有许多优点,例如传动效率高、结构紧凑等。
啮合效率是评价传动机构性能的重要指标之一,本文将对2K—H型行星齿轮机构的啮合效率进行详细分析。
首先,我们需要了解2K—H型行星齿轮机构的结构。
2K—H型行星齿轮机构由一个太阳轮、两个行星轮和一个内啮合的外齿圈组成,其中每个行星轮上分别有两个齿轮。
当输入轴驱动太阳轮转动时,通过行星轮上的齿轮和外齿圈的啮合,实现输出轴的转动。
为了分析啮合效率,我们首先需要确定啮合损失。
啮合损失主要包括啮合瞬时速度失配损失、摩擦损失和轴向力损失。
啮合瞬时速度失配损失是由于齿轮啮合时速度不同导致的能量损失,摩擦损失是由于齿轮啮合摩擦产生的能量损失,轴向力损失是由于齿轮啮合时的轴向力引起的能量损失。
其次,我们需要计算2K—H型行星齿轮机构的传动效率。
传动效率可以通过下式计算得出:其中,\(P_{out}\)为输出轴功率,\(P_{in}\)为输入轴功率。
传动效率与啮合效率直接相关,啮合效率越高,传动效率也就越高。
最后,我们可以通过仿真软件对2K—H型行星齿轮机构的啮合效率进行分析。
通过建立相应模型,设定合适的工作参数,进行仿真计算得出啮合效率,进而评估传动效率。
通过不断调整参数,优化设计,可以提高传动效率,使其更加稳定可靠。
总之,对2K—H型行星齿轮机构的啮合效率进行分析是非常重要的。
通过深入研究,我们可以更好地了解其工作原理,找出影响啮合效率的关键因素,进一步提高传动效率,实现更好的性能表现。
希望本文的分析能够为相关领域的研究和工程实践提供参考和帮助。
行星齿轮传动设计行星齿轮传动是一种常用的传动机构,由太阳轮、行星轮和内齿圈组成。
下面是行星齿轮传动的设计步骤:1. 确定传动比:根据设计要求和所需的转速比,确定太阳轮的齿数、行星轮的齿数以及内齿圈的齿数。
2. 确定太阳轮的尺寸:根据传动比和所需的输出转矩,确定太阳轮的直径和宽度。
太阳轮的齿数可以由太阳轮的直径和齿宽来计算。
3. 确定行星轮的尺寸:根据传动比和所需的输出转矩,确定行星轮的直径和宽度。
行星轮的齿数可以由行星轮的直径和齿宽来计算。
4. 确定内齿圈的尺寸:根据传动比和所需的输出转矩,确定内齿圈的直径和宽度。
内齿圈的齿数可以由内齿圈的直径和齿宽来计算。
5. 确定行星架的尺寸:根据行星轮的直径和内齿圈的直径,确定行星架的长度,使得行星轮能够与内齿圈同时进行旋转。
6. 确定输入轴和输出轴的尺寸:根据太阳轮和内齿圈的尺寸,确定输入轴和输出轴的直径和长度。
7. 进行齿轮轮廓设计:根据太阳轮、行星轮和内齿圈的齿数和模数,进行齿轮轮廓的设计。
可以使用齿轮设计软件来辅助进行设计。
8. 进行齿轮强度计算:根据所选材料的强度和齿轮载荷,进行齿轮强度的计算。
可以使用齿轮强度计算软件来进行计算。
9. 进行动力学分析:通过动力学计算或者仿真,分析行星齿轮传动的动力学特性,包括扭矩输出、速度变化和振动等。
10. 优化设计:根据动力学分析的结果,对设计进行优化,使得传动效率和动力学性能达到最优。
以上是行星齿轮传动设计的一般步骤,实际设计过程中还需要考虑诸如润滑、材料选择、热量分析等因素。
设计过程中,可以借助软件工具进行辅助设计和分析。
行星齿轮特点
行星齿轮是一种常用于变速器、减速器、转换器等机械传动系统中的齿轮机构。
它的特点包括:
1. 构造紧凑:行星齿轮由一个太阳齿轮、若干个行星齿轮和一个内齿轮组成,整个装置的结构非常紧凑,体积小,重量轻。
2. 传动效率高:行星齿轮在传动过程中,由于行星齿轮的齿数较多,每个齿轮的负载相对较小,因此摩擦损失相对较小,传动效率高。
3. 承载能力强:行星齿轮由多个齿轮共同传动,每个齿轮的承载能力相对较小,但叠加在一起后,总的承载能力非常强,可以承受较大的负载。
4. 可靠性高:行星齿轮由多个齿轮组成,每个齿轮的运动状态相对稳定,故整个装置的运动状态较为平稳,可靠性高。
5. 变速比范围广:行星齿轮装置可以通过改变内齿轮和行星齿轮的组合方式,实现不同的变速比,变速比范围广,适应性强。
总的来说,行星齿轮具有结构紧凑、传动效率高、承载能力强、可靠性高、变速比范围广等特点,因此在机械传动系统中得到了广泛的应用。
行星齿轮的结构-概述说明以及解释1.引言行星齿轮是一种常见的传动装置,它由太阳轮、行星轮、行星架和内齿轮等组成,通过它们之间的联动来实现传动功效。
行星齿轮具有结构紧凑、传动比稳定、传动效率高等优点,因此在机械制造领域得到广泛应用。
本文将对行星齿轮的结构、工作原理、应用领域及未来发展趋势进行较为全面的阐述。
编写文章1.1 概述部分的内容1.2 文章结构文章结构部分应该包括以下内容:文章结构本文将分为引言、正文和结论三个部分来探讨行星齿轮的结构。
在引言部分,将对行星齿轮的概述进行介绍,说明本文的目的,并简要说明文章的结构安排。
在正文部分,将详细探讨行星齿轮的定义、工作原理和应用领域。
最后,在结论部分,将总结行星齿轮的优势,探讨其发展趋势,并给出结语。
整个文章结构清晰明了,旨在帮助读者全面了解行星齿轮的结构和应用。
1.3 目的:本文旨在深入探讨行星齿轮的结构,了解其定义、工作原理以及应用领域,通过对行星齿轮的优势进行总结,探讨其未来的发展趋势。
通过对行星齿轮的详细介绍,读者将能够更深入地了解行星齿轮在机械传动中的重要性和应用前景,为相关领域的研究和应用提供更多有益的参考。
} }}请编写文章1.3 目的部分的内容2.正文2.1 行星齿轮的定义行星齿轮是一种常见的齿轮传动机构,由一个中心太阳齿轮、多个行星轮和一个外围内齿圈组成。
它的结构类似于太阳系中行星绕着太阳运行的轨道,因此得名为行星齿轮。
中心的太阳齿轮通常是固定不动的,行星轮则围绕着太阳齿轮旋转,并通过齿轮之间的啮合传递动力。
内齿圈则起到固定行星轮的作用,同时也可通过外部力矩传递动力或实现反向旋转。
行星齿轮传动具有传动比可变、扭矩分配均匀、结构紧凑等优点,广泛应用于各种机械设备中,如汽车变速箱、风力发电机等。
其精密的齿轮啮合设计和可靠的传动性能,使得行星齿轮成为工程领域中不可或缺的重要部分。
2.2 行星齿轮的工作原理行星齿轮是一种用于传动动力的机械装置,其工作原理基于太阳轮、行星轮和太阳轮之间的互相啮合和运动。
拉维娜式行星齿轮机构工作原理引言:拉维娜式行星齿轮机构是一种常见的传动装置,广泛应用于各种机械设备中。
它由太阳轮、行星轮、内部齿圈和行星架等部件组成,通过它们之间的相互作用,实现动力的传递和转换。
本文将详细介绍拉维娜式行星齿轮机构的工作原理。
一、太阳轮的作用太阳轮是拉维娜式行星齿轮机构的主动轮,它通过输入的动力源(如电机)提供动力。
太阳轮的齿轮数通常为较大值,其齿轮与行星轮的齿轮相互啮合,从而传递动力。
二、行星轮的作用行星轮是拉维娜式行星齿轮机构的被动轮,它通过与太阳轮和内部齿圈的齿轮相互啮合,实现动力的传递。
行星轮由行星架支撑,可以绕着太阳轮的轴线旋转,并且自身也可以旋转。
三、内部齿圈的作用内部齿圈是拉维娜式行星齿轮机构的固定轮,它通过连接机械设备或输出轴,将动力输出。
内部齿圈与行星轮的齿轮相互啮合,形成闭合的传动回路。
四、行星架的作用行星架连接太阳轮和行星轮,使它们能够相对旋转,并且保持一定的间隙。
行星架上有若干个行星齿轮,它们与太阳轮和内部齿圈的齿轮相互啮合,实现动力的传递。
五、工作原理当太阳轮旋转时,太阳轮的齿轮将行星轮带动旋转。
由于行星架的存在,行星轮不仅绕着太阳轮的轴线旋转,而且自身也可以旋转。
行星轮的旋转使得行星齿轮与内部齿圈的齿轮发生啮合,从而将动力传递给内部齿圈。
由于内部齿圈是固定的,它将动力输出给连接的机械设备或输出轴。
六、优点和应用拉维娜式行星齿轮机构具有以下优点:1. 具有高传动比和高扭矩输出能力;2. 具有较好的传动效率和刚性;3. 可以实现多速比和逆向传动;4. 结构紧凑,体积小,重量轻。
由于其优越的性能特点,拉维娜式行星齿轮机构广泛应用于各种机械设备中,如工业机械、航空航天设备、汽车传动系统等。
结论:拉维娜式行星齿轮机构通过太阳轮、行星轮、内部齿圈和行星架之间的相互作用,实现动力的传递和转换。
它具有高传动比、高扭矩输出能力、高效率和紧凑的结构等优点,因此在各种机械设备中得到广泛应用。