并联机器人(机械手)模板
- 格式:ppt
- 大小:2.52 MB
- 文档页数:20
1 毕业实习报告学院:机械工程学院专业:机械设计制造及其自动化班级:机自XXX班学号: 1108030454学生姓名: XXXXXX指导教师: XXXXXX2015年5月25日2目录一、实习目的及意义 0二、实习时间和地点 0三、实习内容 03。
1 Delta型并联机器人简介 03。
2 并联机器人公司及产品 (1)3.3 Delta型并联机器人工作原理 (7)3.4 Delta型并联机器人组成 (8)3.4.1硬件结构 (8)3。
4。
2驱动控制系统 (9)3。
4。
3视觉识别系统 (10)3.4。
4软件控制系统 (11)四、实习体会与总结 (12)一、实习目的及意义本次实习在毕业设计过程中进行,目的是为了更加进一步的了解Delta型并联机器人,以便对本次设计有更多的了解,帮助解决设计遇到的一些方案、结构设计上的一些问题。
本次实习的意义是对并联机构有了足够的认识,了解到了当前Delta型并联机器人技术的发展状况,机器人的应用领域及其给工业上带来的益处。
通过这些了解使我对机器人技术更加痴迷,愿意研究该型机器人的一些相关技术使该技术更加成熟能够更广泛应用于生产实践当中。
二、实习时间和地点因为本次实习条件的限制,本地区内无Delta型并联机器人实物可供实习,故本次实习的地点可选择为网上调研的形式,一方面通过大量查阅相关机器人公司的产品简介和说明书了解机器人的研究状况;另外,通过观看Delta型并联机器人的工作视频,深入了解其工作原理。
最终选择了以下十家公司的产品进行了解.本次实习时间不限定,具体的时间从3月初至四月月底。
实习进度随设计进度而定。
三、实习内容3.1Delta型并联机器人简介Delta型并联机器人在1985年诞生在瑞士的洛桑联邦理工学院,是由R。
clavel提出的,因其基座平台和运动平台都呈现三角形形状而得名.当时工业生产中迫切需要一种小型机器人,用于实现对轻小物件的快速抓取和放置。
直到1999年,ABB 开始推广自己的Delta型并联机器人——FlexPicker.近些年来,日本Fanuc公司亦在推广其Delta高速并联机器人-—M-3iA。
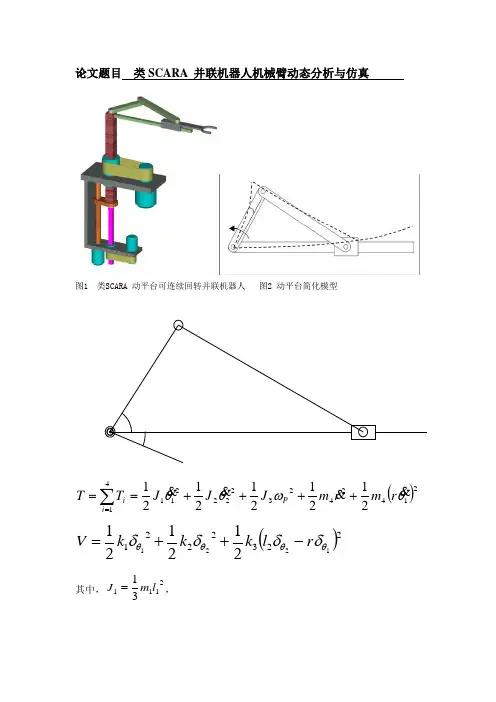
论文题目 类SCARA 并联机器人机械臂动态分析与仿真图1 类SCARA 动平台可连续回转并联机器人 图2 动平台简化模型()2142423222211412121212121θωθθ r m r m J J J T T P i i ++++==∑=()22322211221212121θθθθδδδδr l k k k V -++=其中,211131l m J =,222231l m J =,232333121OP l m l m J +=,BPp l l 22θω =,()()1243212cos cos cos θθθθθ-=--=l l rl BP,()431223323322cos cos cos 2θθθθl l l l l l r +-=-+=,()33232cos 222θπ-⋅⋅-⎪⎭⎫⎝⎛+=l l l l l BP BPOP ()1243θθθθπ-+=-,()12324sin sin θθθ-=l l代入拉氏方程:i i i i q Vq T q T dt d τ=∂∂+∂∂-⎪⎪⎭⎫ ⎝⎛∂∂ 解得:()123123121414222212412111211θδδθδθθθθθθθθθτθθθ∂∂-∂∂+∂∂-∂∂-+-+--=r l k r r k r r m r rm C B r m A J ()22322322142422221241222223222211θδδθδθθθθθθθθθθτθθθ∂∂-∂∂+∂∂-∂∂--++-++=r l k r r k r r m r r m C B r m A l l J J BP211232311θθθδδδτr l k r k k -+='1222322322θθθδδδτr l k l k k -+='其中,()()[]212124224sin cos tan θθθθθ-+-=l m A()()⎥⎦⎤⎢⎣⎡---=433123424212223cos cos tan cos 22sin 3θθθθθθθl l l m B ()()()()⎥⎦⎤⎢⎣⎡--+-+-=4331212212412223cos 2cos 2sin 2cos tan 2sin 21θθθθθθθθθθl l l m C ()()[]()12121242sin cos tan θθθθθθθ --+--=l r()()()()1212124433122221cos sin tan cos cos θθθθθθθθθθθ -⎥⎦⎤⎢⎣⎡---+---=∂∂l l l r()()()()1212124433122222cos sin tan cos cos θθθθθθθθθθθ -⎥⎦⎤⎢⎣⎡-+----=∂∂l l l r ()43122cos cos θθθl l r +-=()()12421221cos tan sin θθθθθθ-+-=∂∂l l r()()12421222cos tan sin θθθθθθ----=∂∂l l r再令()121θθθ-=∂∂a r ,()122θθθ--=∂∂a r ,b r -=∂∂1θ,b r=∂∂2θ,()12θθ-=b r整理成为矩阵格式:,⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+---+-+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+--+++--++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡''0000000000002002000000000000000212123423422212221344244344421212232232323122232242412121θθθθθθδδθθδδθθδδθθττττ b l k abmbl k abm br k abm C B brmr m abm br k abm B C brm abm l k k r l k r l k r k k A l l J J Ar m A r m A J BP 本学期论文进度计划1.对已经建好的系统动力学微分方程整理推敲,讨论振动性质、初始条件和约束条件。
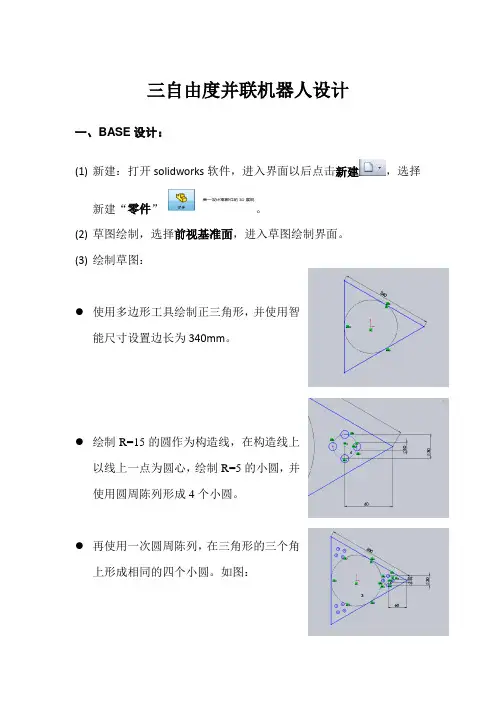
三自由度并联机器人设计一、BASE设计:(1)新建:打开solidworks软件,进入界面以后点击新建,选择新建“零件”。
(2)草图绘制,选择前视基准面,进入草图绘制界面。
(3)绘制草图:●使用多边形工具绘制正三角形,并使用智能尺寸设置边长为340mm。
●绘制R=15的圆作为构造线,在构造线上以线上一点为圆心,绘制R=5的小圆,并使用圆周陈列形成4个小圆。
●再使用一次圆周陈列,在三角形的三个角上形成相同的四个小圆。
如图:(4)使用特征工具栏中的拉伸,拉伸后形成的实体如图:(5)在拉伸后的实体上的一个面上画一个R=10的小圆,并拉伸20mm,形成一个凸台。
二、杆件1设计:草图绘制正三角形时,设置边长为280mm,其他做法同BASE 的做法。
三、杆件2设计(1)在草图中绘制R=12的圆。
(2)拉伸成,深度350,形成圆柱体。
(3)在圆柱的一个底面上绘制R=8的圆,拉伸,深度为30mm。
(4)使用特征——圆顶,选择小圆柱凸台的底面进行添加圆顶,长度为20mm。
(5)使用抽壳工具,厚度选择 3.00mm使圆柱形成薄壁。
四、杆件2设计:(1)草图上绘制R=9mm的圆,并拉伸,深度为300mm,形成圆柱如图:(2)使用草图工具中的矩形工具,在拉伸后的圆柱的一个底面上绘制如图所示的矩形,尺寸约束如图所示。
(4)拉伸切除,深度设置为20mm。
(5)在截面上画R=5的圆。
(6)拉伸,选择方式为两侧对称,深度为30mm。
完成的杆件2的轴测图如下:四、球副座设计(1)在草图上绘制如下草图:(2)使用线性阵列中的圆周阵列,形成其他三个小圆。
(3)拉伸,深度设为10mm。
(4)在圆柱一表面绘制草图:并拉伸形成如下(5)在凸台表面绘制R=11.6的半圆。
(6)使用扫描切除工具,形成半球凹曲面。
五、转动副底座设计:(1)方法同球副座设计,形成如下:(2) 使用矩形工具在底面上绘制的草图如下:(3)使用拉伸切除命令,深度设为20mm。
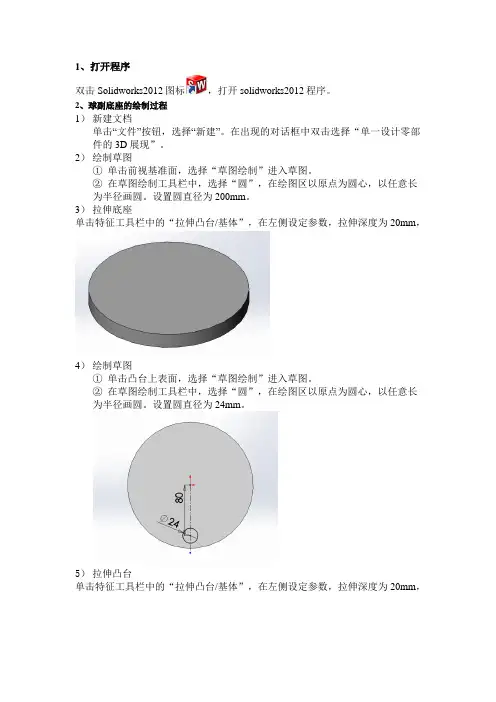
1、打开程序双击Solidworks2012图标,打开solidworks2012程序。
2、球副底座的绘制过程1)新建文档单击“文件”按钮,选择“新建”。
在出现的对话框中双击选择“单一设计零部件的3D展现”。
2)绘制草图①单击前视基准面,选择“草图绘制”进入草图。
②在草图绘制工具栏中,选择“圆”,在绘图区以原点为圆心,以任意长为半径画圆。
设置圆直径为200mm。
3)拉伸底座单击特征工具栏中的“拉伸凸台/基体”,在左侧设定参数,拉伸深度为20mm,4)绘制草图①单击凸台上表面,选择“草图绘制”进入草图。
②在草图绘制工具栏中,选择“圆”,在绘图区以原点为圆心,以任意长为半径画圆。
设置圆直径为24mm。
5)拉伸凸台单击特征工具栏中的“拉伸凸台/基体”,在左侧设定参数,拉伸深度为20mm,6)绘制草图①单击凸台上表面,选择“草图绘制”进入草图。
②在草图绘制工具栏中,绘制草图如图。
7)旋转切除单击特征工具栏中的“旋转切除”,旋转中心线为直线。
8)圆周阵列单击“工具”→“草图工具”→“圆周阵列”,进入圆周阵列。
在左侧设定要阵列的数量为3,从草图中选择要阵列的实体为步骤7)所得实体。
单击“确认”,退出阵列。
效果如图。
4)保存保存文档为“球副底座”。
3、球副杆的绘制过程1)新建文档单击“文件”按钮,选择“新建”。
在出现的对话框中双击选择“单一设计零部件的3D展现”。
2)绘制草图1①单击前视基准面,选择“草图绘制”进入草图。
②在草图绘制工具栏中选择“圆”,以原点为圆心,任意长为半径绘制一个圆形。
③选择“智能尺寸”为圆形添加尺寸,直径为30mm。
④单击“退出草图”完成草图绘制。
3)拉伸在特征工具栏中选择“拉伸凸台/基体”,在左侧设定拉伸长度为90mm。
单击“确认”,退出特征编辑。
4)绘制草图2①单击上一步拉伸出的圆柱的一个端面,选择“草图绘制”,进入草图编辑。
②在草图绘制工具栏中,选择“圆”,以原点为圆心,以任意长为半径画圆。