并联机器人(机械手)..
- 格式:ppt
- 大小:2.52 MB
- 文档页数:20
并联背景介绍并联背景介绍一、引言在现代制造业中,已经成为重要的工具和装备。
随着技术的不断发展,的功能日益增强,也越来越多地用于处理复杂的任务。
并联作为一种新型,具有很大的潜力和前景。
本文将介绍并联的背景和相关信息。
二、并联的定义并联,也被称为并联机械手,是一种由多个连接在一起的运动装置组成的。
每个连接点都有一个自由度,使得能够执行复杂的运动和操作。
并联一般由基座、连接点、末端执行器等组成。
三、并联的优势1、高刚性:并联结构使得具有较高的刚性,能够完成更精确的任务。
2、高稳定性:由于并联的连接点都能够自由运动,使得在执行任务时更为稳定。
3、高精度:并联的各个连接点均配备传感器,能够实时感知环境,提供更高的定位精度。
4、多功能:并联具有多个自由度,能够同时执行多种任务,提高工作效率。
四、并联的应用领域1、制造业:并联广泛应用于汽车制造、电子产品组装等领域,能够提高生产效率和产品质量。
2、医疗领域:并联用于手术操作,能够提高手术精度和减少手术风险。
3、建筑领域:并联可用于高空作业、搬运重物等任务,提高施工效率和安全性。
4、食品行业:并联可用于食品包装、烹饪等任务,能够实现自动化生产。
五、并联的发展趋势1、更高的运动速度和精度:随着传感器和控制技术的不断进步,未来的并联将具有更高的运动速度和精度。
2、更智能化的控制系统:技术的发展将使得并联具备更强的自主学习和决策能力。
3、更广泛的应用领域:并联将进一步应用于更多领域,如农业、航天等。
六、附件本文档涉及附件如下:1、并联的示意图2、并联在制造业中的应用案例研究七、法律名词及注释1、:根据《技术标准定义》(GB/T 37607-2016)的规定,是一种能够通过计算机编程和自动化设备控制实现复杂任务的机械设备。
2、自由度:执行任务时能够自由运动的方向和程度,表示的运动自由度的数量。
两轴并联机械手算法
【原创版】
目录
1.引言
2.两轴并联机械手的定义和特点
3.两轴并联机械手的运动学模型
4.两轴并联机械手的算法设计
5.结论
正文
【引言】
随着科技的发展,机器人技术在各行各业中得到了广泛的应用。
其中,两轴并联机械手以其独特的结构和优越的性能,在许多领域中都有着重要的作用。
本文将介绍两轴并联机械手的算法设计,以期为相关领域的研究和应用提供参考。
【两轴并联机械手的定义和特点】
两轴并联机械手是一种具有两个旋转自由度的机器人手臂,其结构简单,运动灵活,可实现空间的直线运动和曲线运动。
相较于其他类型的机器人手臂,两轴并联机械手具有运动精度高、运动速度快、承载能力大等特点。
【两轴并联机械手的运动学模型】
两轴并联机械手的运动学模型主要包括手臂的姿态和位置。
为了描述这两个方面,需要建立相应的坐标系和旋转矩阵。
在此基础上,通过求解运动学方程,可以得到两轴并联机械手的运动轨迹。
【两轴并联机械手的算法设计】
两轴并联机械手的算法设计主要包括运动规划和轨迹跟踪两部分。
运动规划是指根据给定的任务,确定机械手的运动轨迹和运动参数。
轨迹跟踪是指根据运动规划的结果,控制机械手按照预定轨迹进行运动。
【结论】
两轴并联机械手算法设计是机器人领域的重要研究内容。
合理的算法设计可以提高机械手的运动精度和运动速度,从而提高工作效率和质量。
delta 并联机械手最优控制曲线一、背景介绍Delta并联机械手是一种常用于工业生产线上的机械手,具有高速度、高精度和高稳定性等优点。
在实际应用中,如何控制Delta并联机械手的运动轨迹以达到最优效果是一个重要问题。
二、控制曲线的概念控制曲线是指在机器人运动过程中,规划出的一条描述机器人轨迹的曲线。
控制曲线可以通过数学模型计算出来,也可以通过实验测量得到。
三、Delta并联机械手运动学模型为了控制Delta并联机械手的运动轨迹,需要先建立其运动学模型。
Delta并联机械手的运动学模型可以用三个位移变量描述,分别为x,y,z。
其中x、y、z分别表示末端执行器在三个平面上的位移。
四、最优控制曲线求解方法1.基于逆向算法:该方法需要先确定末端执行器所需达到的位置和姿态信息,然后通过逆向算法计算出每个关节角度及其变化率,从而得到最优控制曲线。
2.基于PID控制:该方法利用PID控制器对机器人的运动进行调节,从而得到最优控制曲线。
3.基于遗传算法:该方法通过遗传算法对机器人的运动进行优化,从而得到最优控制曲线。
五、Delta并联机械手最优控制曲线实现1.确定末端执行器所需达到的位置和姿态信息;2.根据机械手的运动学模型计算出每个关节角度及其变化率;3.通过控制曲线求解方法得到最优控制曲线;4.将最优控制曲线输入到机械手的控制系统中,实现机械手的运动轨迹控制。
六、Delta并联机械手最优控制曲线应用案例Delta并联机械手在工业生产线上应用广泛。
在汽车生产线上,Delta 并联机械手可以用于安装车身零部件;在电子产品生产线上,Delta并联机械手可以用于组装电子产品等。
七、总结通过建立运动学模型和采用合适的求解方法,可以得到Delta并联机械手的最优控制曲线。
这对提高生产效率和产品质量具有重要意义。

Delta并联机器人目标识别与抓取技术研究共3篇Delta并联机器人目标识别与抓取技术研究1Delta并联机器人目标识别与抓取技术研究随着机器人技术的发展,越来越多的机器人进入到工业生产领域中,人们不断尝试将机器人的应用范围拓展到更多的领域。
其中,机器人的目标识别和抓取技术是机器人应用的重要研究方向之一。
Delta并联机器人作为一种高速、高精度的机器人,已经在工业生产中得到了广泛的应用。
本文将从Delta并联机器人目标识别和抓取技术两个方面出发,探讨Delta并联机器人在生产领域中的应用。
一、Delta并联机器人目标识别技术Delta并联机器人的目标识别技术包括三个主要部分:图像采集、图像处理和目标识别。
1. 图像采集:Delta并联机器人的图像采集主要是通过机器视觉系统实现的。
机器视觉系统一般由摄像头、图像采集卡和图像处理软件组成。
摄像头负责对被检测物体进行拍摄,图像采集卡将拍摄的图像信号输出给计算机,图像处理软件对图像进行处理,提取目标物体的特征。
2. 图像处理:图像处理主要是对图像进行预处理,包括图像去噪、图像滤波、边缘检测、二值化等操作。
预处理之后,可以将图像转化为特征向量,用来进行目标检测。
3. 目标识别:目标识别是基于特征向量对目标物体进行分类的过程。
目前,目标识别技术主要有两种方法:模板匹配和机器学习。
模板匹配是一种传统的目标识别方法,它通过对事先制作好的模板与图像进行匹配,从而识别目标物体。
机器学习是一种更加高效的目标识别方法,它将大量的样本数据输入到计算机中,通过机器学习算法从中提取特征,从而实现目标分类。
二、Delta并联机器人抓取技术Delta并联机器人的抓取技术包括两个主要部分:手眼协调和抓取控制。
1. 手眼协调:手眼协调是指机器人手臂和视觉系统之间的协作。
在抓取之前,机器人要对目标进行定位,然后根据目标的位置、姿态等信息,确定机器人手臂的运动轨迹。
因此,手眼协调技术是Delta并联机器人实现自动抓取的关键技术之一。
桁架机械手工作原理
桁架机械手是一种多关节并联机器人,由支架、执行器、关节和末端执行器等组成。
工作原理如下:
1. 结构:桁架机械手采用类似桥梁桁架结构,通过众多连接件和连接杆件组成支架,形成一个空间框架结构。
2. 关节:桁架机械手通常有多个关节,在每个关节处设置执行器,可以控制关节的转动。
关节的旋转在三维空间内构建出机械手的工作区域。
3. 传动:执行器通过传动装置将动力传递给关节,使关节能够做出相应的运动。
传动方式可以有齿轮传动、链条传动、皮带传动等多种方式。
4. 控制系统:桁架机械手的关节运动由控制系统控制。
控制系统接收输入信号,经过处理后,将控制信号发送给执行器,从而实现机械手的运动。
控制系统可以采用编程控制、传感器反馈控制等方式。
5. 末端执行器:桁架机械手的末端通常安装有执行器,可以用于抓取、搬运、装配等操作。
末端执行器可以是夹具、机械手爪、吸盘等。
总体来说,桁架机械手通过关节的连续旋转和末端执行器的操作,完成各种工业生产任务。
工作原理是通过控制系统控制关节运动,从而实现末端执行器对物体的操作。
桁架机械手具有结构简单、运动灵活和可扩展性强等特点,广泛应用于物流、装配、焊接、喷涂等领域。
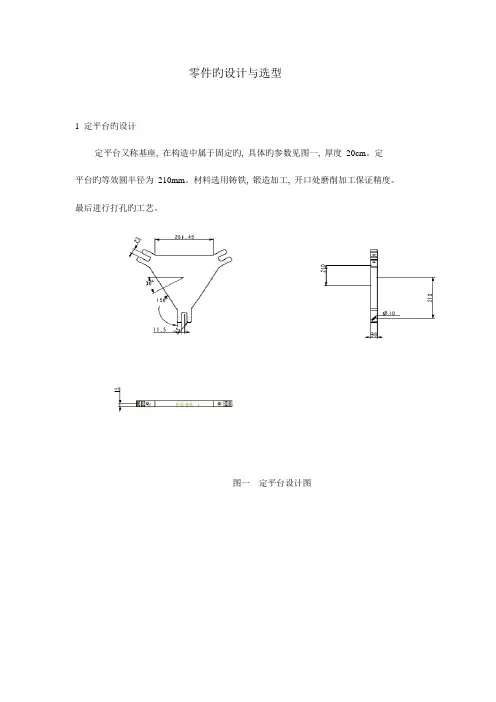
零件旳设计与选型1 定平台旳设计定平台又称基座, 在构造中属于固定旳, 具体旳参数见图一, 厚度20cm。
定平台旳等效圆半径为210mm。
材料选用铸铁, 锻造加工, 开口处磨削加工保证精度。
最后进行打孔旳工艺。
图一定平台设计图2 驱动杆旳设计具体参数为长* 厚* 宽: 880mm*10mm*20mm。
孔旳参数为φ10*10mm。
材料用铝合金, 设计为杆式, 质量小, 经济, 同步也满足载荷条件。
图二驱动杆旳设计图3 从动杆旳设计具体参数为长* 宽* 高: 620*20*10mm。
孔参数为φ10*10mm。
材料选用铝合金。
图三从动杆旳设计图4 动平台旳设计参数如下图, 考虑到重量因素, 采用铝合金, 切削加工。
动平台旳等效圆半径为50mm, 分布角为21.5°。
图四动平台旳设计图5 链接销旳设计45号钢, 为积极杆和定平台旳连接销: φ9*66mm。
6 球铰链旳选型目前, 大多数旳Delta机构旳积极杆与从动杆旳链接方式为球铰链旳链接。
球型连接铰链是用于自动控制中旳执行器与调节机构旳连接附件。
它采用了球型轴承构造具有控制灵活、精确、扭转角度大旳长处, 由于该铰链安装、调节以便、安全可靠。
因此, 它广泛地应用在电力、石油化工、冶金、矿山、轻纺等工业旳自动控制系统中。
球铰链由于选用了球型轴承构造, 能灵活旳承受来自各异面旳压力。
本文选用球铰链设计, 是重要由于球铰链旳可控性, 以及构造简朴, 易于装配。
且有较好旳可维护性。
本文选用了伯纳德旳SD 系列球铰链, 相对运动角为60°。
7 垫圈旳选型此处我们选用原则件。
GB/T 97.1 10‐140HV , 10.5*1.6mm。
8 电机旳选型本设计旳Delta 机器人, 重要面向工业中轻载旳场合, 例如封装饼干等。
因此, 如下做电动机旳选型解决。
由于需要对角度旳精确控制, 因此决定选用伺服电机。
交流伺服电机有如下特点: 启动转矩大, 运营范畴广, 无自转现象, 正常运转旳伺服电动机, 只要失去控制电压, 电机立即停止运转, 这也是Delta 机构需要旳。

两轴并联机械手算法一、引言随着科技的不断发展,机器人技术在我国得到了广泛的关注与应用。
其中,两轴并联机械手作为一种具有较高灵活性和精确度的机器人系统,在众多领域发挥着重要作用。
本文将探讨两轴并联机械手算法的研究意义、基本原理及应用领域,并对未来发展进行展望。
二、两轴并联机械手的结构和工作原理两轴并联机械手主要由基座、臂部、手腕和末端执行器等部分组成。
其工作原理是通过两个旋转轴实现臂部的旋转运动,从而使手腕和末端执行器到达指定的位置,完成各种工作任务。
三、两轴并联机械手算法的研究意义研究两轴并联机械手算法对于提高机器人的控制性能、精度和速度等方面具有重要意义。
通过对不同算法的分析和比较,可以为机器人工程师在实际应用中选择更适合的算法提供理论依据。
四、两轴并联机械手算法的基本原理两轴并联机械手算法主要基于逆运动学求解和正运动学求解。
逆运动学求解是通过设定末端执行器的位姿目标,求解机器人各关节的运动轨迹;正运动学求解则是根据机器人各关节的运动轨迹,计算末端执行器的位姿。
五、常见两轴并联机械手算法介绍1.欧拉变换法:通过欧拉变换将旋转矩阵转换为关节角度,实现对两轴并联机械手的控制。
2.螺旋理论法:利用螺旋理论将手腕部的运动分解为旋转和平移两个方向,实现对两轴并联机械手的控制。
3.神经网络法:通过训练神经网络实现对两轴并联机械手的控制,具有较高的学习能力和自适应性。
六、两轴并联机械手算法的应用领域1.工业生产:用于组装、搬运、焊接等工序,提高生产效率和产品质量。
2.医疗领域:用于手术操作、康复训练等,减轻医护人员的工作负担。
3.服务业:如智能家居、无人驾驶等领域,为人们提供便捷的生活服务。
七、发展趋势与展望1.高性能计算能力的不断提升,将有助于提高两轴并联机械手的控制精度和速度。
2.传感器技术的不断发展,将为两轴并联机械手提供更加精确的实时数据。
3.人工智能技术的融合,将使两轴并联机械手具有更强的自主学习和决策能力。
282机械设计与制造Machinery Design&M anufacture第4期2021年4月并联机器人正运动学与NURBS轨迹规划张皓宇\刘晓伟、任川、赵彬w(1.辽宁省气象信息中心,辽宁沈阳110168:2.沈阳新松系统自动化股份有限公司,辽宁沈阳110168;3.东北大学信息科学与工程学院,辽宁沈阳110819)摘要:并联机器人是一种具有高栽荷自重比的封闭式运动结构,针对并联机器人运动控制和N U R B S轨迹问题进行了深入的研究,首先从并联机器人的逆运动学问题进行了解析方法的求解其次,针对正运动学(F KP)在教学上是难以解决问题,提出了一种多层感知器进行反向传播学习的神经网络进行实时求解。
再次,开发了基于N U R B S的通用插补器,它可以处理任何类型的几何图形使得机器人运动轨迹平滑。
最后利用实验验证了运动学和N U R B S曲线求解并联机器人模型的正确性。
该策略在少数迭代和很少执行时间内,位置和方向参数的精度分别接近0.01m m和0.01。
,验证了算法的有效性和正确性。
关键词:并联机器人;N U R B S曲线;运动学;神经网络中图分类号:T H16;TP242.3文献标识码:A文章编号:1001-3997(2021 )04-0282-05Forward Kinematics Control and NURBS Trajectory Planning for Parallel RobotsZHANG Hao-yu1,UU Xiao-wei1,REN Chuan1,ZHAO Bin2.3(1.R e s e a r c h e r L e v e l S e n i o r E n g i n e e r o f M e t e o r o l o g i c a l I n f o r m a t i o n Ce nt er,L i a o n i n g Shenyang110168,China;2.SIASUNRo bot&Aut om at io n Co.,L t d.,L i a o n i n g Shenyang110168,China;3.S c h o o l o f I n f o r m a t i o n S c i e n c e&E n g i n e e r i n g,N o r t h e a s t e r n U n i v e r s i t y,L i a o n i n g Shenyang110819,China)A b s tr a c t:Parallel robot is a closed motion structure with a high load to weight ratio.In this paper^the motion control of parallel robot and NURBS trajectory are studied in depth.Firstly,the inverse kinematics o f parallel robot is solved by analytical method.Secondly,the forward kinematics(FKP)is difficult to solve mathematically9this paper proposes a multilayer perceptron back-propagation learning neural network for real-time solution.Thirdly y a universal interpolator based on NURBS is developedy which can handle any type of geometric shapes to make the robot's trajectory smooth.Finally,the correctness of kinematics and NURBS curves for solving parallel robot model is verified by experiments.The accuracy of position and direction parameters of this strategy is close to O.Q\mm and0.Q\o respectively in few iterations and f ew execution time,which verifies the effectiveness and correctness of the algorithm.Key Words-.Parallel Robot;NURBS Curve;Kinematics;Neural Networkl引言并联机构学理论研究蓬勃发展,并联机器人的运动学理论 也不断得到丰富"-31。
并联机器人-定义并联机构(Parallel Mechanism,简称PM),可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
并联机器人-特点并联机器人和传统工业用串联机器人在哲学上呈对立统一的关系,和串联机器人相比较,并联机器人具有以下特点:无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;结构紧凑,刚度高,承载能力大;完全对称的并联机构具有较好的各向同性;工作空间较小;根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用并联机器人-背景及应用并联机构的出现可以回溯至20世纪30年代。
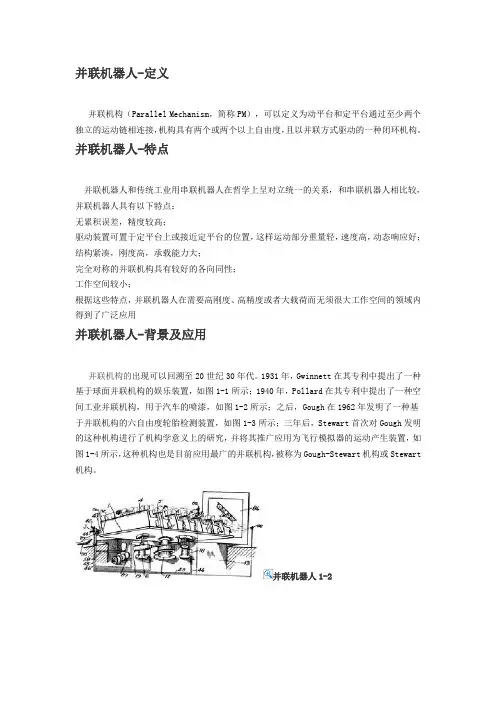
1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置,如图1-1所示;1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆,如图1-2所示;之后,Gough在1962年发明了一种基于并联机构的六自由度轮胎检测装置,如图1-3所示;三年后,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,如图1-4所示,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart 机构。
并联机器人1-2并联机器人1-2图1-1 并联娱乐装置图1-2 Pollard的并联机构并联机器人1-3并联机器人1-4图1-3 Gough并联机构图1-4 Stewart并联机构应用方面:(1)运动模拟器并联机器人并联机器人图1-7 波音737-400飞行模拟器图1-8 CAE 飞行模拟器(2)并联机床(3)微操作机器人(4)力传感器其他:军事领域中的潜艇、坦克驾驶运动模拟器,下一代战斗机的矢量喷管、潜艇及空间飞行器的对接装置、姿态控制器等;生物医学工程中的细胞操作机器人、可实现细胞的注射和分割;微外科手术机器人;大型射电天文望远镜的姿态调整装置;混联装备等,如SMT公司的Tricept混联机械手模块是基于并联机构单元的模块化设计的成功典范。
并联机器人历史并联机器人历史、应用及发展浙江理工大学机电研究所李秦川并联机构英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构,它的出现可以回溯至20世纪30年代。
1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置,如图1-1所示;1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆,如图1-2所示;之后,Gough在1962年发明了一种基于并联机构的六自由度轮胎检测装置,如图1-3所示;三年后,Stewart图1-1 并联娱乐装置图1-2 Pollard的并联机构Figure 1-1 Parallel amusement device Figure 1-2 Pollard’s PM 首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,如图1-4所示,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart机构。
从结构上看,Stewart机构的动平台通过六个相同的独立分支与定平台相联接,每个分支中含有一个联接动平台的球铰、一个移动副和一个连接定平台的球铰,为避免绕两个球铰中心连线的自传运动,通常也用一个万向铰来代替其中一个球铰。
1978年,Hunt首次提出把六自由度并联机构作为机器人操作器,由此拉开并联机器人研究的序幕,但在随后的近10年里,并联机器人研究似乎停滞不前。
直到80年代末90年代初,并联机器人才引起了广泛注意,成为国际研究的热点。
在国内,黄真教授在1991年研制出我国第一台六自由度并联机器人样机(图1-5),在1994年研制出一台柔性铰链并联式六自由度机器人误差补偿器 (图1-6),在1997年出版了我国第一部关于并联机器人理论及技术的专著。
并联运动机器人应用背景略谈并联构型装备已成为制造业目前的研究热点之一。
与串联构型相比, 并联构型具有刚度好、精度高、高速和高加速度等特点, 众多研究机构和制造企业都看好其在制造领域的应用前景。
目前多种并联构型装备已经被设计和开发出来, 应用的领域涉及机床、机器人、定位装置、娱乐、医疗卫生等。
研究人员正试图开发出在速度、刚度、精度和费用等方面更优的并联构型装备, 以便在与传统制造装备的竞争中占据更有利的地位。
1. 早期的并联构型装备及特点[1]结构中包含一个或多个并联机构的机器称为并联构型装备。
只要是多自由度, 驱动器分配在不同环路上的闭式多环机构均可称为并联机构。
20 世纪中叶, 罗马尼亚人Gough 采用并联机构设计了一种六自由度的轮胎测试机(见图1) , 这种结构被称为六足结构(Hexapod) 。
1965 年, Stewart 将一种并联机构用于飞行模拟器, 它包含三个支链, 每个支链上分别通过一个固定平台上的旋转关节和一个可伸缩连杆来控制。
这种机构具有六自由度, 被称为Stewart 平台。
1978年, 澳大利亚机构学家Hunt 提出并联机构可以应用于机器人操作。
此后若干年, 并联构型装备的研究进展缓慢, 主要是受到计算机和伺服控制技术的限制, 计算6 个支链运动的时间和物质花费太大。
但一些经济实力雄厚的部门已开始使用并联机构, 主要应用于航空、航天等领域。
随着计算机技术的发展, 尤其是计算快速、功能强大的工业PC 出现之后, 促进了并联机构的应用和发展。
80 年代后期, 几种基于并联结构的机器人相继出现, 它们普遍具有较高的速度和加速度, 动态特性好, 在装配行业得到很好的应用。
但真正引起轰动是在1994 年的芝加哥机床展览会上, Giddings & Lewis 和Ingersoll 分别推出了基于并联机构的六足机床, 被媒体誉为“机床结构的重大革命”、“二十一世纪的数控加工装备”。
96研究与探索Research and Exploration ·工艺流程与应用中国设备工程 2020.11 (上)2 工作原理如图4所示,使用该擦鞋器时,将脚从外壳踩踏口向下踩踏直至接触到踏板,此时,大小不一的多个擦鞋滚轮包裹住鞋子;然后,继续向下踩踏踏板,踏板向后下方运动由推杆2带动齿条向前移动,齿条带动齿轮组,齿轮组又带动同轴的滚轮组转动。
当脚回缩时,弹簧回弹,踏板受到弹簧的回弹力向前上方运动带动齿条向后移动,因单向齿轮只能单向旋转,所以这个过程传动装置组不运动。
脚踩踏和回缩过程循环,使滚轮持续运动,滚轮接触鞋子,达到清洁目的。
图4 工作原理3 产品特点该产品结构简单,仅使用齿轮组、滚轮组等机械结构,用简单的踩踏操作就可以实现鞋面的清洁,无须电力驱动,使用安全,不消耗能源,且成本低廉,仅使用标准的常用零件即可加工组装。
分拣机器人在各种加工工厂的生产线中,担当着非常重要的任务,随着市场需求的不断的扩大,再加上相关行业,比如快递行业的快速发展,分拣机器人正在朝着多元化、精准化、大众化的方向发展。
传统的分拣机器人多为全铰链平面并联机构,在利用滚珠丝杠和杆组成的分拣机器人方面研究较少。
因此,本文尝试将由两个移动副和三个转动副组成的平面五杆并联机构应用到分拣系统中,并具备初步的定点抓取和堆放能力。
1 平面并联分拣机的原理对于并联机构的家族中,平面五杆并联机构是自由度最少的机构,其中本文选择平面3R+2P 机构,其可在平面内定位一点。
平面3R+2P 机构有以下优点。
(1)采用两个螺旋副加三个铰链结构,转动副和滚珠丝杠的制造技术相对比较成熟,并且易达到较高的精度。
(2)采用螺旋副作为驱动副,结构比较简单,步进电平面并联分拣机器人的原理和机械结构设计黄泽浩(华中科技大学,湖北 武汉 430074)摘要:当前,并联机器人在3D 打印、切削、运动仿真等领域都有较广泛的应用,且当前的生产制造业发展迅速,用人力来分拣包装已经越来越显得力不从心、劳动力供应不足。
本科毕业设计(论文)Delta并联机器人系统总体设计燕山大学本科生毕业设计(论文)摘要近些年,delta机器人越来越得到大多数人的关注,并逐渐开始在工业上得到成熟的应用。
与串联机器人相比,并联机器人有很大优势。
其中之一就是可以把电机固定在基座上,这样就可以减轻机器机构上的重量。
当需要直接驱动时,把电机固定在基座上是一个必要的田间。
因此,并联机器人非常适合直接驱动的情况。
并联机器人的另一个优点就是他的刚度很高,这些特征可以得到更多的精准度和更快的操作。
Delta机器人是其中非常重要的一种。
在本书中,介绍了并联机器人的产生特点及应用。
计算了机器人的自由度,位置正反解,并分析了它的空间奇异形位。
还通过分析比较几种控制器和方案,选择其中最适合的方案。
并设计了delta机器人的控制电路,并详细介绍它的控制器功能。
关键词:并联机构位置反解步进电机结构设计II燕山大学本科生毕业设计(论文)AbstractIn recent years ,increased interest in parallel robots has been observed..Parallel robots possess a number of advantages when compored to serial arms, The most importantone is certainly the possibility to keep the motors fixed into the base ,thus allowing a large reduction of the robot structure’s active mobile mass.keeping the motors on the robot base is a requairment when direct-drive is used ,thus ,parallel robots are well suited to direct-drive actuation.Another advantage of parallel robots is their high rigiditg.these features allow more precise and much faster mani pulations. The delta parallel robot is very famous among them.In this paper,the historyapplication character of the parallel robots are introduced .And I compted the degree of free of the parallel robot,analysis the singular position. The position solution and position inverse solution too. At last, there are several methords of controlling. And I choice one of then which is better suited to this robot. This method will be introduced latter.Key word:parallel delta, position inverse solution , singular positionII目录摘要.................................................................................... 错误!未定义书签。