并联机械手式三维打印机结构设计
- 格式:doc
- 大小:2.23 MB
- 文档页数:43
《基于并联机构的3D打印关键技术研究》篇一一、引言随着科技的飞速发展,3D打印技术已经逐渐成为制造业、航空航天、医疗等多个领域的重要技术。
并联机构作为一种新型的机械结构,其具有高精度、高效率、高稳定性的特点,为3D打印技术提供了新的发展方向。
本文旨在探讨基于并联机构的3D 打印关键技术的研究,以提高3D打印的效率、精度和稳定性。
二、并联机构在3D打印中的应用并联机构是一种新型的机械结构,其通过多个驱动器同时驱动多个运动副,实现高精度、高效率的运动。
在3D打印中,并联机构可以用于支撑打印平台、移动打印头等关键部件,提高打印的效率和精度。
此外,并联机构还可以通过优化设计,实现更稳定的打印过程,提高打印件的质量。
三、基于并联机构的3D打印关键技术研究1. 打印头设计打印头是3D打印的关键部件之一,其性能直接影响打印件的精度和质量。
基于并联机构的打印头设计,可以通过优化驱动器和运动副的设计,实现更精确的控制和更高的打印速度。
此外,还可以通过改进喷嘴结构和材料供应方式,提高打印头的稳定性和耐用性。
2. 支撑平台设计支撑平台是3D打印中另一个重要的部件,其稳定性直接影响到打印件的质量。
基于并联机构的支撑平台设计,可以通过优化平台结构和驱动方式,实现更平稳、更精确的移动,从而提高打印件的精度和稳定性。
3. 路径规划与控制路径规划与控制是3D打印过程中的关键技术之一。
基于并联机构的3D打印需要采用高效的路径规划算法和控制策略,以确保打印过程的稳定性和打印件的精度。
这包括对打印头移动路径的规划、速度和加速度的控制、以及打印过程中的实时监控和调整等。
四、实验与分析为了验证基于并联机构的3D打印关键技术的有效性,我们进行了多组实验。
实验结果表明,基于并联机构的3D打印技术具有高精度、高效率、高稳定性的特点,可以显著提高打印件的精度和质量。
同时,我们还对不同参数对打印过程和结果的影响进行了分析,为进一步优化设计和提高性能提供了依据。
摘要3D熔融打印是最近两年开始流行的一种成形技术。
它以数字模型文件为基础,通过逐层熔融打印的方式来构造物体。
我们日常生活中的熔融打印机能熔融打印一些平面纸张材料。
而3D熔融打印机熔融打印出的是立体产品。
本文章对3D熔融打印的技术体系和国内外产业发展现状、发展态势作了综合介绍,综述3D熔融打印技术的基本概念、发展简史、熔融打印过程原理、应用领域、广泛影响以及面临的问题等。
在介绍3D 技术的发展历程、3D熔融打印技术的工作原理流程及特点的基础上,分析了3D熔融打印技术的创新点和存在的问题,展望了3D熔融打印技术的未来发展趋势。
根据相应的指标、参数在满足标准化型材的前提下对3D熔融打印机进行整体结构设计,对某些重要的零部件详细分析它的参数和原理作用。
3D熔融打印机在工作过程中因受应力的影响可能会发生变形,所以接下来应用材料力学的知识对X方向运动的光杆进行受力分析校核,以确保三维熔融打印机能熔融打印出精度比较高的产品。
3D熔融打印机工作的时候是三个方向一起运动,而熔融打印机要精准稳定地做X、Y、Z方向的运动,必须要有精确平稳的轨道承载,能否在这三个方向上自由地运动是我对熔融打印机研究的非常重要的部分,而3D熔融打印机要求的是在最小的尺寸空间里实现三个运动方向运动范围的最大化。
设计中主要使用了Solidworks三维制图软件,受力方面结合材料力学力的知识对3D熔融打印机的主要部件进行了受力分析。
关键词:3D熔融打印技术;结构设计;SolidworksAbstract3D printing is the beginning of the last two years a popular rapid prototyping technology. It is based on a digital model file, by the way printed layer by layer construct objects. Our daily lives printer can print some paper material plane. The 3D printer to print out the three-dimensional product. This article is for 3D printing technology system and domestic and foreign industry development status, development trend made a comprehensive presentation, review the basic concepts of 3D printing technology, development history, the printing process principles, applications, and the problems faced by a broad impact and so on. On the basis of the development process of introduction of 3D technology, 3D printing technologies work processes and characteristics, analyzes the innovation of 3D printing technology and problems, look to the future development trend of 3D printing technology.According to relevant indicators, parameters in meeting the standardization of 3D printer profiles premise overall structural design, some important parts of a detailed analysis of its parameters and principles of action. 3D printer due to the impact of stress may be deformed in the course of their work, so the next application of knowledge of the mechanical movement of the light pole X direction stress analysis check to make sure that the 3D printer can print out high precision products.When the 3D printer to work together is a motion in three directions, and the printer you want to do accurate and stable movement X, Y, Z direction, there must be a stable orbit precise bearing, can freely move in three directions my printer is a very important part of the research, and 3D printers achieve the required range of motion in three directions of movement in the smallest size to maximize space. The main use of Solidworks designthree-dimensional mapping software, by combining the mechanical aspects of knowledge force strength of the main components were stress analysis 3D printer.Keywords:3D printing; design; stress analysis; Solidworks目录Abstract (2)绪论 (1)第一章熔融打印的背景 (2)1.1熔融打印技术概论 (2)1.2熔融打印技术的特点 (2)1.3熔融打印技术- 工艺过程 (3)1.4熔融打印技术的应用 (4)第二章总体方案及结构设计 (6)2.1总体设计要求 (6)2.2 熔融打印机床的结构运动方案 (6)第三章电机方案的选择及选型 (6)3.1 电机方案的比较 (6)3.2 步进电机的选型 (7)第四章丝杆的计算 (10)4.1 电机选型 (10)4.2 丝杆轴的刚性计算 (11)4.3丝杆扭矩计算: (12)4.4 X向轴的校核 (14)4.5 Y向轴的校核 (16)第五章打印头挤压装置的设计 (18)5.1 打印头挤压装置的基本原理及功能 (18)5.2 打印头挤压装置的组成 (19)第六章控制系统的设计 (20)6.1控制系统有几种分类方法 (20)6.2控制方案设计 (21)总结 (25)致谢 (26)参考文献 (27)绪论美国Stratasys公司推出的FDM设备是由Scott Crump于1988年最早开发出来打印技术。
3D打印机的机械结构设计摘要:近年来,制造业为了不断提高自身产品的质量水平,大量应用3D打印机设备进行产品制造,这种设备的应用,使得一些结构复杂的零件加工效率和质量显著提升,也在一定程度上突破了传统工艺的局限性。
在3D打印机中,基于FDM工艺的3D打印机是一个重要的品类,但这类设备中,进口比例仍然较高,这就需要加强对其机械结构设计进行研究,推动其国产化进程,以解决技术依赖问题。
关键词:3D打印机;机械结构;设计引言自2008年起,桌面式3D打印机进入了飞速发展的阶段,这主要是因为reprap的开源技术得到了极大的推广应用,从而产生了多个制造桌面3D打印机的知名企业。
经过不断改进,在开源3D打印机的基础上逐渐出现了SLS、SLA、DLP、3DP等多种打印技术,对制造业的进步发展产生了重大意义。
而3D打印机的结构也出现了门架体系结构、双光轴结构、并联式结构等多种形式。
1基本结构的设计结合实际需要,本次设计中设计人员的基本思路如下:首先,基于直角坐标系的x轴和y轴,组成平面扫描运动框架;其次,在机构选用方面,x轴和y轴的导轨均采用丝杠机构,z轴光杆则采用丝杆机构;最后,整体工作台选择三回旋轴机构,该机构主要由伺服电机和转轴组成,作为3D打印机设备的驱动。
基于此设计可知,x、y、z3个方向的移动均通过丝杆加以控制,电机则为其各方向的移动提供动力。
其在实际加工部件的过程中,与普通打印机类似,均由系统控制工作台的3个自由度旋转相应角度,以实现预期的3D打印环节。
2工作原理3D打印机主要工作原理是通过电脑的切片软件将三维模型按照设置的层厚切成一层一层,再根据切片算法,把面化成线的填充,再转化为G代码。
3D打印机控制软件通过串口通信的方式,把数据传送到3D打印机的主控板,主控板上的固件主要由G代码解释器组成,G代码解释器把数据流解释为3个驱动喷头运动的步进电机和1个挤料电机的运动,通过A4988驱动步进电机的运动。
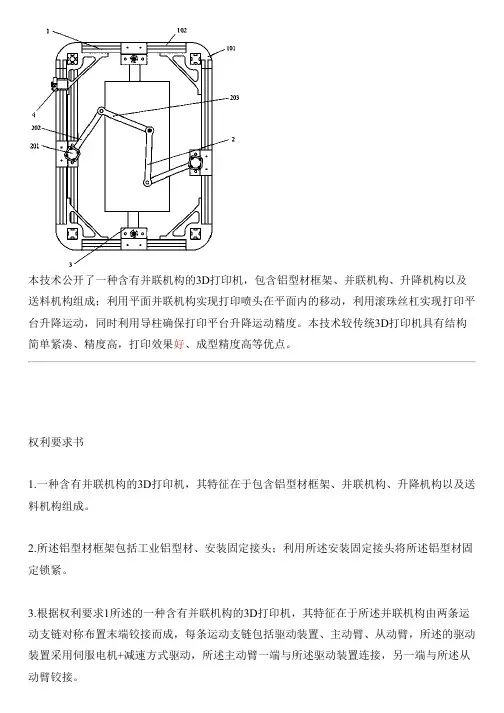
本技术公开了一种含有并联机构的3D打印机,包含铝型材框架、并联机构、升降机构以及送料机构组成;利用平面并联机构实现打印喷头在平面内的移动,利用滚珠丝杠实现打印平台升降运动,同时利用导柱确保打印平台升降运动精度。
本技术较传统3D打印机具有结构简单紧凑、精度高,打印效果好、成型精度高等优点。
权利要求书1.一种含有并联机构的3D打印机,其特征在于包含铝型材框架、并联机构、升降机构以及送料机构组成。
2.所述铝型材框架包括工业铝型材、安装固定接头;利用所述安装固定接头将所述铝型材固定锁紧。
3.根据权利要求1所述的一种含有并联机构的3D打印机,其特征在于所述并联机构由两条运动支链对称布置末端铰接而成,每条运动支链包括驱动装置、主动臂、从动臂,所述的驱动装置采用伺服电机+减速方式驱动,所述主动臂一端与所述驱动装置连接,另一端与所述从动臂铰接。
4.根据权利要求1所述的一种含有并联机构的3D打印机,其特征在于所述升降机构包括驱动电机、同步带传动装置、滚珠丝杠副、光轴、直线轴承、打印床,所述驱动电机设在所述铝型材框架的底下中部,所述滚珠丝杠副的螺杆与所述驱动电机通过所述同步带传动装置连接;所述滚珠丝杠副的螺母与所述打印床固接,所述光轴对称布置在所述滚珠丝杠副螺杆的两侧,通过所述直线轴承固定在所述打印床上。
5.根据权利要求1所述的一种含有并联机构的3D打印机,其特征在于所述送料机构包括送丝安装座、紧定螺钉、送丝轮、紧固螺栓、送料电机、丝料压紧轴承、锁紧螺栓以及弹簧;所述送料电机与所述送丝安装座螺纹连接,所述送丝安装座上部开有缺口;所述送丝轮固接在所述送料电机轴端,并通过所述紧定螺钉紧固,所述丝料压紧轴承通过所述紧固螺栓固接在所述送丝安装座上;所述锁紧螺栓与所述送丝安装座缺口螺纹连接,用以调节所述送丝轮和所述丝料压紧轴承之间松紧度。
技术说明书一种含有并联机构的3D打印机技术领域本技术属于3D打印技术领域,更具体涉及一种含有并联机构的3D打印机。
《基于并联机构的3D打印关键技术研究》篇一一、引言随着科技的不断发展,3D打印技术已经成为现代制造业的重要分支。
在众多3D打印技术中,基于并联机构的3D打印技术因其高精度、高效率、高稳定性的特点,得到了广泛的应用和关注。
本文将重点研究基于并联机构的3D打印关键技术,分析其技术原理、研究现状、发展趋势以及应用前景。
二、并联机构3D打印技术原理并联机构3D打印技术是一种基于并联机器人的3D打印技术。
其工作原理是利用并联机构的多轴联动,实现对打印模型的精确控制。
具体而言,该技术通过控制多组并联的运动轴(如水平运动轴、垂直运动轴等),实现对打印模型的全方位运动和位置控制。
在此基础上,结合特定算法,可以精确地控制喷头在三维空间中的运动轨迹,从而完成复杂的3D打印任务。
三、关键技术研究(一)高精度控制技术高精度控制技术是并联机构3D打印技术的核心之一。
为了实现高精度的打印效果,需要采用先进的控制算法和传感器技术。
例如,可以采用PID控制算法、模糊控制算法等,对并联机构的运动进行精确控制。
同时,通过使用高精度的传感器(如激光位移传感器、视觉传感器等),实现对打印过程的实时监测和反馈控制。
(二)多材料打印技术多材料打印技术是实现复杂结构、多功能材料的重要手段。
在并联机构3D打印中,可以通过更换不同材料的喷头或使用多喷头系统,实现多种材料的同步或顺序打印。
此外,还可以通过优化材料配比和打印工艺,实现材料性能的优化和提升。
(三)智能优化技术智能优化技术是实现并联机构3D打印高效率、高稳定性的关键。
通过采用人工智能算法、机器学习等技术,实现对打印过程的智能控制和优化。
例如,可以通过对历史数据的分析和学习,预测并优化喷头的运动轨迹和速度,从而提高打印效率和稳定性。
此外,还可以利用智能诊断技术,对打印过程中的异常情况进行实时诊断和处理。
四、研究现状与展望目前,基于并联机构的3D打印技术在国内外均得到了广泛的研究和应用。
国内外众多科研机构和企业纷纷投入大量资源进行技术研发和产品开发,推动该技术的不断创新和发展。
《基于并联机构的3D打印关键技术研究》篇一一、引言随着科技的不断发展,3D打印技术逐渐成为制造领域的一种革命性技术。
并联机构作为3D打印设备中关键的支撑结构,对提高打印效率、打印精度以及打印对象的多样性具有重要意义。
本文旨在深入探讨基于并联机构的3D打印关键技术,为相关研究与应用提供理论支持和实践指导。
二、并联机构在3D打印中的应用并联机构以其高精度、高刚度、高效率等特点,在3D打印设备中得到了广泛应用。
并联机构能够为3D打印提供稳定的运动平台,有效减小因设备振动带来的打印误差。
同时,通过控制并联机构的运动轨迹,可以实现复杂的3D打印过程,如多材料打印、大型复杂构件的制造等。
三、关键技术研究(一)高精度并联机构设计高精度是3D打印技术的核心要求之一。
为提高并联机构的打印精度,需要从机构设计、材料选择、加工工艺等方面进行优化。
例如,采用高精度导轨、高刚性材料等提高机构的整体性能;优化并联机构的运动学参数,以减小误差传递;通过先进的加工工艺,提高机构的装配精度等。
(二)多材料3D打印技术多材料3D打印技术能够提高打印对象的性能和多样性。
基于并联机构的3D打印设备,需要研究不同材料的兼容性、材料切换的精确控制以及多材料融合的工艺参数等关键技术。
此外,还需要开发相应的软件系统,实现多材料的自动分层和路径规划。
(三)大型复杂构件的制造技术大型复杂构件的制造是3D打印技术的重要应用领域。
针对这一领域,需要研究并联机构的运动范围、刚度以及承载能力等关键技术。
同时,还需要优化打印策略,如分层厚度、填充率、支撑结构等,以提高打印效率和精度。
四、实验与结果分析为验证基于并联机构的3D打印关键技术的有效性,我们进行了多组实验。
实验结果表明,高精度并联机构设计能够有效提高打印精度;多材料3D打印技术能够实现不同材料的融合和切换;大型复杂构件的制造技术能够成功制造出具有复杂结构和功能的构件。
此外,我们还对不同工艺参数对打印效果的影响进行了分析,为实际应用提供了理论依据。
本科毕业设计(论文)说明书并联机械手式三维打印机结构设计学院机电工程学院专业班级机械工程及自动化五班学生姓名学生学号指导教师提交日期2014年5月28日毕业设计(论文)评语:毕业设计(论文)总评成绩:毕业设计(论文)答辩小组负责人签字:年月日摘要三维打印技术是集机械、自动控制、计算机科学、材料学等为一体的先进制造技术。
本文首先介绍了三维打印技术的基本原理和特点,以及三维打印技术的发展现状和关键技术。
接着阐述并联机器人的机构原理和特点,还有它的发展国内外发展情况。
然后通过选题背景及设计目的引出如今三维打印机存在的问题,比如成型精度和速度等。
本文是对并联机械手式三维打印的整体结构设计。
着重于机械手的机构的设计,简单性地说明打印机的整体设计。
在机械手的机构设计部分,需要建立运动学模型。
对于机器人的控制系统来说,运动学正解和运动学反解都是不可避免的。
还有一个重要点是并联机器人的尺度综合。
尺度综合是并联机械手设计的重要内容,速度、精度、刚度、工作空间是评价并联机械手系统性能的重要指标。
机械手的机构设计完成后,因为是基于并联机械手的三维打印机,还需要讨论三维打印机的整体设计,这也是为了能将并联机械手和三维打印机很好地结合为一体。
对于部分结构,本文会予以重点讨论。
关键词:三维打印技术,并联机械手,运动学模型,尺度综合AbstractThree-dimensional printing technology is one of the advanced manufacturing technology of machinery, automatic control, computer science, material science etc.. This paper first introduces the basic principle and characteristics of 3D printing technology, as well as 3D printing technology development status and key technology. Then it elaborates the mechanism principle and the characteristic of the parallel robot, and the development of its domestic and foreign development. And then through the background and the design objective leads now 3D printer problems, such as molding speed and precision.This paper is the overall structure design of parallel manipulator type of three-dimensional printing. The design focuses on the manipulator mechanism, the simple description of the overall design of the printer.In the design of manipulator mechanism part, needs to establish the kinematics model. For the control system of robot, kinematics and inverse kinematics is inevitable. Another important point is the synthesis of parallel robot. Synthesis is an important content of design parallel machine, speed, precision, rigidity, the working space is an important index for evaluating the performance of parallel manipulator system.The mechanism of robot design, because it is a 3D printer parallel manipulator based on, also need to discuss the overall design of 3D printers, this is to be the good combination of parallel manipulator and a 3D printer as a whole. For part of the structure, this paper will be focused on.Keywords: 3D printing technology, parallel manipulator, kinematics model, dimension synthesisKey words: Multivariable system, Predictive control, Environmental test device目录摘要................................................................................................................................................ I Abstract .......................................................................................................................................... I I 目录............................................................................................................................................. III 第一章绪论 (1)1.1三维打印机概述 (1)1.1.1桥梁检修的概述 (1)1.1.2应用前景 (1)1.1.3存在的问题 (2)1.2并联机械手综述 (4)1.2.1并联机构的特点 (4)1.2.2并联机构的分类 (5)1.2.3并联机器人的应用 (9)1.2.4发展展望 (11)1.3选题背景及设计目的 (11)1.4选题背景及设计目的 (12)第二章机械手的设计 (13)2.1 设计前分析 (13)2.2 Delta机器人结构分析 (13)2.3动平台位置反解 (15)2.3.1坐标系建立 (15)2.3.2位置反解分析 (16)2.4动平台位置正解 (18)2.5机械手的工作空间 (18)2.6机械手的驱动部分 (20)2.6.1电机选型 (20)2.6.2扭力校验 (20)2.7机械手材料选择 (21)2.7.1主动臂材料选择 (22)2.7.2动平台材料选择 (23)2.7.3静平台材料选择 (24)2.7.4其他部分确定 (25)2.8本章小结 (27)第三章三维打印机其他部分的设计 (28)3.1 支架的设计 (28)3.2送料机构 (29)3.3热平台固定 (30)3.4料架设计 (30)3.5喷头清理设计 (32)3.6防护板设计 (32)3.7本章小结 (34)结论 (35)参考文献 (36)附录.............................................................................................................. 错误!未定义书签。
致谢.............................................................................................................. 错误!未定义书签。
第一章绪论第一章绪论1.1三维打印机概述三维打印机(Three Dimension Printers),又称3DP。
是一位名为恩里科·迪尼(Enrico Dini)的发明家设计的一种神奇的打印机,它甚至可以“打印”出一幢完整的建筑1.1.1桥梁检修的概述三维打印机在过去通常又被称为“快速成型机”,它是添加制造技术的一种形式。
工作原理类似打印机的打印头,不同点在于除了喷头在做X-Y平面运动外,工作台还沿着Z轴方向进行垂直运动;并且喷头喷出的材料不是油墨或打印机用的粉末,而是一种特殊的粘结剂或者熔融状态下的塑料、金属。
[1]它通过对电脑中三维软件的识别,进行STL格式(也是三角网格格式)转换,再结合切层软件确定摆放方位和切层路径,并进行切层工作和相关支撑材料的构造。
最后使用喷头将固态的线型成型材料加热成半熔融状态之后挤出来(采用粘结剂的就直接挤出),和支撑材料自下而上,一次一层的构铸成最终实体。
简单点说,可以理解为软件把物体分成若干个横截面,而三维打印机将这些横截面一次一层的沉淀、堆积。
整个过程就像是普通的二维打印机再加个Z轴,一层叠一层地打印,最终形成我们所需的实体。
从它整个成像的过程来看,我们知道三维打印机至少要由软件控制系统、成型材料、支撑材料、成型材料匣、支撑材料匣、喷头、加热模组、成型空间等几大部份构成。
其中成型材料和支撑材料就相当于我们普通打印机的耗材,也有的机型不需要支撑材料,大大降低了用户的后期使用成本,如美国Z Corperation公司的Z系列机型。
1.1.2应用前景3D打印已经成为一种潮流,三维打印机除了能够在制造业中生成各种模型外,由于它的占地空间和环保理念都逐步适应了现代商务区的要求,也开始应用于教育、建筑、设计等多个行业,尤其是工业设计,数码产品开模等,可以在数小时内完成一个模具的打印,节约了很多产品到市场的开发时间。
3D 打印机可以使用各种原料打印三维模型。
使用三维铺助设计软件,工程师设计出一个模型或原型之后,无论设计的是一所房子还是人工心脏瓣膜,之后通过相关公司生产的3D打印机进行打印,打印的原料可以是有机或者无机的的材料,例如橡胶、塑料、甚至是人体器官,不同的打印机厂商所提供的打印材质不同。