并联机器人(机械手)
- 格式:ppt
- 大小:1.93 MB
- 文档页数:21

并联机器人机构构型创新设计研究汪劲松.关立文.王立平.李铁民.提出一种并联机器人机构构型创新设计新方法——桁架推演法,该方法包括三个主要步骤:根据具体设计需求选择自由度为0的并联机构桁架,并选择适当的推演规则;在一定的约束条件下对桁架进行推演;对推演结果分析、判断和决策,得到新并联机构构型。
最后举例说明了桁架和推演规则等对并联机器人机构构型创新设计具有决定性影响的关键技术问题。
MATLAB 在并联机器人机构仿真中的应用运用Matlab语言给出了平面3RRR并联机构三维仿真实体模型的简单画法及三维实体模型的运动仿真,同时又运用微分法和影响系数两种算法仿真了机构的速度及加速度曲线,最后从仿真图中直接分析了机构的奇异位型点,并说明了文献[7]中运用新的性能分析方法所得出的机构尺寸变化对机构性能影响的结论的实用性。
这充分展现了Matlab的科学计算可视化技术在机器人领域的应用及发展前景。
一种6-6UHU并联机器人的设计和实验研究研制了一种新型结构的大工作空间6 6UHU并联机器人。
通过对虎克铰摆角极限对机器人工作空间的影响研究,在机构设计上解决了杆间干涉和下关节极限问题,简化了干涉检测算法,降低了运动控制算法的复杂性,并且增大了工作空间。
研制出基于DSP的多轴控制器PMAC卡的交流伺服电机控制系统和实验系统,并进行了实验。
给出了不同姿态下该机器人的工作空间分析。
仿真数据和实验结果表明,所研制的新型6 6UHU 并联机器人,结构精巧,工作空间大,动平台的倾斜角达到4 5°;同时具有高刚度、高精度、操作性能好等特点。
干涉防护系统能保证机器人在大工作空间机动运行情况3转动1移动并联机器人机构的结构综合房海蓉.方跃法.胡明.利用螺旋和反螺旋之间的互易关系,分析了给定机构运动自由度与支链约束之间的关系,提出了基于螺旋理论的4自由度并联机器人机构结构综合的一种方法.据此构造了3转动1移动4自由度并联机器人机构的可能支链类型,列举了多种新型对称机构和非对称机构.所提方法对其它少自由度并联机器人机构的结构综合具有普遍意义.并联机构激光加工系统创新设计孙会来.林树忠.李洪来.高铁红.提出了一种新型的两自由度并联平动机构 ,并将其成功的应用到YAG激光加工平台当中。
52
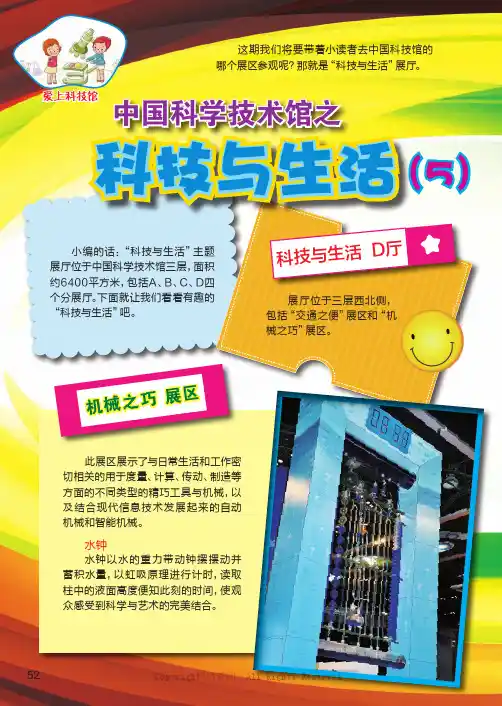
展厅位于三层西北侧,
包括“交通之便”展区和“机
械之巧”展区。
中国科学技术馆之
这期我们将要带着小读者去中国科技馆的
哪个展区参观呢?那就是“科技与生活”展厅。
小编的话:“科技与生活”主题
展厅位于中国科学技术馆三层,面积
约6400平方米,包括A、B、C、D四
个分展厅。
下面就让我们看看有趣的
“科技与生活”吧。
此展区展示了与日常生活和工作密
切相关的用于度量、计算、传动、制造等
方面的不同类型的精巧工具与机械,以
及结合现代信息技术发展起来的自动
机械和智能机械。
科技与生活(5)
水钟
水钟以水的重力带动钟摆摆动并
蓄积水量,以虹吸原理进行计时,读取
柱中的液面高度便知此刻的时间,使观
众感受到科学与艺术的完美结合。
爱上科技馆
机械之巧
展区
科技与生活D
厅
Copyright©博看网. All Rights Reserved.
53并联机械手
展示了新型并联机器人的高速
性和智能特性。
观众可以输入简单的
文字或图形,由并联机械手迅速抓放
拼图,拼成当初输入的文字或图形。
(本栏目合作单位:中国科学技术馆 图/文提供:陈明晖)“我”的生产线
由三台工业机器人和影视屏幕
组成一条趣味“生产线”,让观众感
受工业机器人的高超本领和现代工
业生产的过程。
Copyright©博看网. All Rights Reserved.。
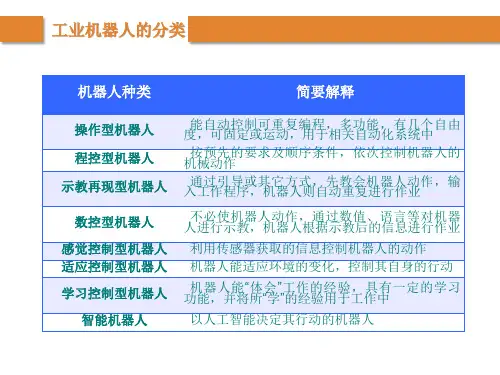
《机器人基础》第5章串/并联机器人5.1串联机器人简介5.1.1串联机器人的结构组成5.1.2串联机器人的运动控制5.2并联机器人简介5.2.1并联机器人的结构组成5.2.2并联机器人的运动控制5.3经典应用案例5.3.1串联机器人应用案例5.3.2并联机器人应用案例5.1串联机器人简介(1P2)在智能制造蓬勃发展的同时工业机器人的发展越来越快速,各行各业对机器人机械学的发展也越来越重视,从大范围来分机器人机械学可分为串联机器人、并联机器人和串并联混合的混联机器人这三大类型。
串联机器人一般是由基座、腰关节、腰部、肩关节、大臂、小臂、腕关节、手腕以串联的形式连接而形成的开链式结构。
开链是指一种不含回路的运动链,也称为开式运动链。
如图5.1所示,由运动副和构件以串联的形式组成的开链称之为单个开式链,即单开链(single pended chain,SOC)。
一般而言串联机器人通常是由单开链组成的。
该类机器人结构简单,灵活性大,易控制、且具有很好的规避功能。
常被应用各种领域,如工业中的机械手夹具、航天领域中导航陀螺仪和生活中的雷达天线等。
如果多个单开链互相结合在一起,就形成了树状开链,如图5.2所示。
除了线性方面,在平面和空间上,单开链有平面开链和空间开链之分。
平面单开链是指所有运动副都在同一个平面内运动,平面串联机器人就是平面单开链组成的串联机器人;而空间单开链式指运动副在不同的平面内运动,则空间串联机器人就是由空间单开链组成的串联机器人。
(1P15)近年来研究人员对机器人的各个部件以及各个部件的性能进行了特殊研究,改进了机器人各部件的结构使其获得更好的运动性能,这些研究对推广串联机器人的广泛运用有重要的意义。
图 5.1单开链图 5.2树状开链除了上述串联机器人的优点,也有明显的不足,如各关节均为悬臂结构,这就意味着在相同的自重条件或者体积下与并联机器人相比,串联机器人的承重能力更低,刚度也下降,这就使得串联机器人的各个关节误差的累计与放大,在误差大的同时它的精度就会减低。

1.机器人的定义:1)美国机器人工业协会给出的定义:机器人是一种用于移动各种材料,零件,工具或专用装置,通过可编程序动作来执行各种任务并具有编程能力的多功能机械手。
2)日本工业机器人协会给出的定义:一种带有存储器件和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动。
3)我国科学家对机器人的定义:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力,规划能力,动作能力和协同能力,是一种具有高度灵活性的自动化机器。
2.PID工作原理,作用:PID控制是自动化中广泛使用的一种反馈控制,其控制器由比例单元,积分单元和微分单元组成,利用信号的偏差值,偏差的积分值,偏差的微分值的组合来构成操作量,操作量中包含了偏差信号的现在,过去,未来三方面的信息,所以是一种经典控制方式。
1)P-比例控制:作用:提高快捷性,灵敏度;不足:系统不稳定,易振荡2)I-积分控制:作用:消除误差,提高稳态精度;不足:输出缓慢,系统稳定性下降;3)微分控制:提高抗扰能力;不足:不稳定。
3.简述滚珠丝杠工作原理:在丝杆和螺母上加工有弧行螺旋槽,当它们套装在一起时便形成螺旋滚道,并在滚道内装满滚珠。
而滚珠则沿滚道滚动,并经回珠管作周而复始的循环运动。
回珠管两端还起挡珠的作用,以防滚珠沿滚道掉出。
4. 机器人工作原理:工业机器人系统组成1)机械系统作用相当于人的身体(骨骼,手,臂,腿等);2)驱动系统相当于人的肌肉;3)控制系统相当于人的大脑;4)感知系统相当于人的五官。
机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。
末端操作器在空间的实时位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止。
1机械人技术集中了机械工程、电子技术、计算机技术、自动控制理论及人工智能等学科的最新研究成果。
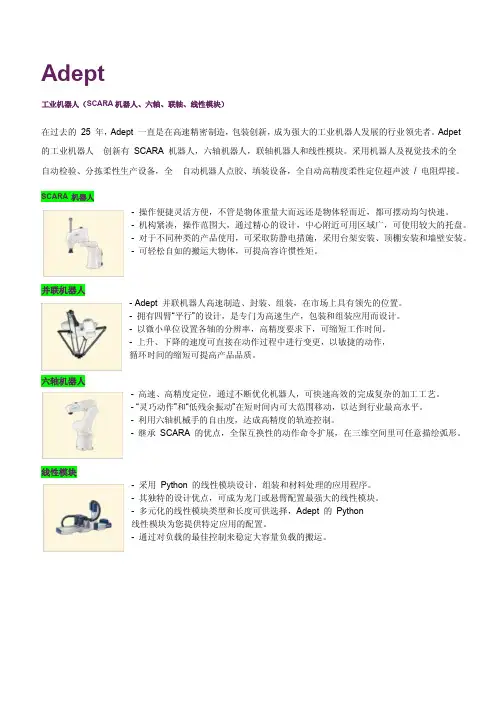
Adept工业机器人(SCARA机器人、六轴、联轴、线性模块)在过去的25 年,Adept 一直是在高速精密制造,包装创新,成为强大的工业机器人发展的行业领先者。
Adpet 的工业机器人创新有SCARA 机器人,六轴机器人,联轴机器人和线性模块。
采用机器人及视觉技术的全自动检验、分拣柔性生产设备,全自动机器人点胶、填装设备,全自动高精度柔性定位超声波/ 电阻焊接。
SCARA 机器人- 操作便捷灵活方便,不管是物体重量大而远还是物体轻而近,都可摆动均匀快速。
- 机构紧凑,操作范围大,通过精心的设计,中心附近可用区域广,可使用较大的托盘。
- 对于不同种类的产品使用,可采取防静电措施,采用台架安装、顶棚安装和墙壁安装。
- 可轻松自如的搬运大物体,可提高容许惯性矩。
并联机器人- Adept 并联机器人高速制造、封装、组装,在市场上具有领先的位置。
- 拥有四臂“平行”的设计,是专门为高速生产,包装和组装应用而设计。
- 以微小单位设置各轴的分辨率,高精度要求下,可缩短工作时间。
- 上升、下降的速度可直接在动作过程中进行变更,以敏捷的动作,循环时间的缩短可提高产品品质。
六轴机器人- 高速、高精度定位,通过不断优化机器人,可快速高效的完成复杂的加工工艺。
- “灵巧动作”和“低残余振动”在短时间内可大范围移动,以达到行业最高水平。
- 利用六轴机械手的自由度,达成高精度的轨迹控制。
- 继承SCARA 的优点,全保互换性的动作命令扩展,在三维空间里可任意描绘弧形。
线性模块- 采用Python 的线性模块设计,组装和材料处理的应用程序。
- 其独特的设计优点,可成为龙门或悬臂配置最强大的线性模块。
- 多元化的线性模块类型和长度可供选择,Adept 的Python线性模块为您提供特定应用的配置。
- 通过对负载的最佳控制来稳定大容量负载的搬运。
2024年第48卷第4期Journal of Mechanical Transmission一种基于3-UU并联机构的腕关节康复机器人研制田培良刘智飞王炜博马晓宝兰媛(太原理工大学机械与运载工程学院,山西太原030024)摘要在3-UU并联机构基础上研制腕关节康复机器人样机,辅助中风患者进行腕关节康复训练。
回顾了3-UU机构演化过程和自由度,根据3-UU机构的约束关系和几何特性,采用球坐标法和滚动-俯仰-偏航(Roll-Pitch-Yaw,RPY)法分析机构逆运动学,得到机构平台和驱动的关系式;将研制的样机与经典的3-RRR腕关节康复机构进行对比,得出本机构不存在多解和奇异值等优点;对样机运动性能以及前臂两大肌群的肌电信号进行了测试。
实验表明,该机构的最大横滚角度为-90°~90°,俯仰角度为-90°~90°,虚拟偏航角度为-180°~180°,最高能产生950 mV的肌电信号。
上述结果表明,所研制的样机能满足腕关节运动需求,对前臂肌群进行训练。
关键词腕关节训练并联机构逆运动学康复机器人Research and Manufacturing of Wrist Joint Rehabilitation Robots Based onthe 3-UU Parallel MechanismTian Peiliang Liu Zhifei Wang Weibo Ma Xiaobao Lan Yuan(College of Mechanical and Vehicle Engineering, Taiyuan University of Technology, Taiyuan 030024, China)Abstract Based on the 3-UU parallel mechanism, a prototype robot for wrist joint rehabilitation is devel⁃oped to assist stroke patients in wrist joint rehabilitation training. Based on the constraint relation and geometric characteristics of the 3-UU mechanism, the inverse kinematics of 3-UU mechanism is analyzed by spherical co⁃ordinate method and roll-pitch-yaw (RPY) method, and the relation between the platform and the driver is ob⁃tained. Compared with the classic 3-RRR wrist joint rehabilitation mechanism, the developed prototype has no advantages such as multi-solution and singular value. The motion performance of the prototype and the electro⁃myographic signals of the two major muscle groups in the forearm are measured. The experimental results show that the maximum roll angle is -90° to 90°, the pitch angle is -90° to 90°, and the virtual yaw angle is -180° to 180°. The maximum electromyogram (EMG) signal can be generated at 950 mV. The results show that the devel⁃oped model can meet the requirements of the wrist motion and train the forearm muscle group.Key words Wrist joint training Parallel mechanism Inverse kinematics Rehabilitation robot0 引言中风是一种很常见的疾病,会使大部分患者有不同程度的大脑受损,最终导致肢体僵硬。
body dynamic and yields the input current vector of the servovalve, the dynamic gravity term including the gravity of platform, load and hydraulic cylinders is used to compensate the influence of gravity of parallel manipulator platform. 入电流矢量的伺服阀,动态重力项包括重力平台,负载和液压缸,用于补偿重力的影响,对并联机器人平台。
In analytical, the steady state errors converge asymptotically to zero, independent of load variation. 在分析,稳态误差渐近收敛于零,独立的负载变化。
The model-based controller, PD control with gravity compensation, is developed to reduce the effect of load variety of platform and eliminate steady state error of hydraulic driven parallel manipulator. 基于模型的控制器,控制重力补偿,以减少开发影响负载多种平台和消除稳态误差的液压驱动并联机器人。
MATHEMATICAL MODEL 数学模型The 6-DOF hydraulic driven parallel manipulator consist of a fixed base (down platform) and a moveable platform (upper platform) with six cylinders supporting it, all the cylinders are connected with movement platform and base with Hooke joints, as shown in Fig.1. 六自由度液压驱动并联机器人包括一个固定基地(下)和一个可移动的平台(平台)六缸支持它,所有气缸的运动平台和基地连接万向接头,如图1所示。
本科毕业设计(论文)Delta并联机器人系统总体设计燕山大学本科生毕业设计(论文)摘要近些年,delta机器人越来越得到大多数人的关注,并逐渐开始在工业上得到成熟的应用。
与串联机器人相比,并联机器人有很大优势。
其中之一就是可以把电机固定在基座上,这样就可以减轻机器机构上的重量。
当需要直接驱动时,把电机固定在基座上是一个必要的田间。
因此,并联机器人非常适合直接驱动的情况。
并联机器人的另一个优点就是他的刚度很高,这些特征可以得到更多的精准度和更快的操作。
Delta机器人是其中非常重要的一种。
在本书中,介绍了并联机器人的产生特点及应用。
计算了机器人的自由度,位置正反解,并分析了它的空间奇异形位。
还通过分析比较几种控制器和方案,选择其中最适合的方案。
并设计了delta机器人的控制电路,并详细介绍它的控制器功能。
关键词:并联机构位置反解步进电机结构设计II燕山大学本科生毕业设计(论文)AbstractIn recent years ,increased interest in parallel robots has been observed..Parallel robots possess a number of advantages when compored to serial arms, The most importantone is certainly the possibility to keep the motors fixed into the base ,thus allowing a large reduction of the robot structure’s active mobile mass.keeping the motors on the robot base is a requairment when direct-drive is used ,thus ,parallel robots are well suited to direct-drive actuation.Another advantage of parallel robots is their high rigiditg.these features allow more precise and much faster mani pulations. The delta parallel robot is very famous among them.In this paper,the historyapplication character of the parallel robots are introduced .And I compted the degree of free of the parallel robot,analysis the singular position. The position solution and position inverse solution too. At last, there are several methords of controlling. And I choice one of then which is better suited to this robot. This method will be introduced latter.Key word:parallel delta, position inverse solution , singular positionII目录摘要.................................................................................... 错误!未定义书签。
动态优化的一种新型高速,高精度的三自由度机械手①彭兰(兰朋)②,鲁南立,孙立宁,丁倾永(机械电子工程学院,哈尔滨理工学院,哈尔滨 150001,中国)( Robotics Institute。
Harbin Institute of Technology,Harbin 150001,P。
R。
China)摘要介绍了一种动态优化三自由度高速、高精度相结合,直接驱动臂平面并联机构和线性驱动器,它可以提高其刚度进行了动力学分析软件ADAMS仿真模拟环境中,进行仿真模拟实验.设计调查是由参数分析工具完成处理的,分析了设计变量的近似的敏感性,包括影响参数的每道光束截面和相对位置的线性驱动器上的性能.在适当的方式下,模型可以获得一个轻量级动态优化和小变形的参数。
一个平面并联机构不同截面是用来改进机械手的.结果发生明显的改进后的系统动力学仿真分析和另一个未精制一个几乎是几乎相等.但刚度的改进的质量大大降低,说明这种方法更为有效的。
关键词: 机械手、 ADAMS、优化、动力学仿真0 简介并联结构机械手(PKM)是一个很有前途的机器操作和装配的电子装置,因为他们有一些明显的优势,例如:串行机械手的高负荷承载能力,良好的动态性能和精确定位的优点等. 一种新型复合3一DOF臂的优点和串行机械手,也是并联机构为研究对象,三自由度并联机器人是少自由度并联机器人的重要类型。
三自由度并联机器人由于结构简单,控制相对容易,价格便宜等优点,具有很好的应用前景。
但由于它们比六自由度并联机器人更复杂的运动特性,增加了这类机构型综合的难度,因此对三自由度并联机器人进行型综合具有理论意义和实际价值。
本文利用螺旋理论对三自由度并联机器人进行型综合,以总结某些规律,进一步丰富型综合理论,并为新机型的选型提供理论依据,以下对其进行阐述。
如图-1所示机械手组成的平面并联机构(PPM)包括平行四边形结构和线性驱动器安装在PPM.两直接驱动电机c整合交流电高分辨率编码器的一部分作为驱动平面并联机械装置.线型致动器驱动的声音线圈发动机.这被认为是理想的驱动短行程的一部分.作为一个非换直接驱动类,音圈电机可以提供高位置敏感和完美的力量与中风的角色,高精密线性编码作为回馈部分保证在垂直方向可重复性。