复数与拉氏变换
- 格式:ppt
- 大小:621.00 KB
- 文档页数:49
拉氏变换的物理意义
拉氏变换是将时间函数f(t)变换为复变函数F(s),或作相反变换。
时域(t)变量t是实数,复频域F(s)变量s是复数。
变量s又称“复频率”。
拉氏变换建立了时域与复频域(s域)之间的联系。
s=jw,当中的j是复数单位,所以使用的是复频域。
通俗的解释方法是,因为系统中有电感X=jwL、电容X=1/jwC,物理意义是,系统H(s)对不同的频率分量有不同的衰减,即这种衰减是发生在频域的,所以为了与时域区别,引入复数的运算。
但是在复频域计算的形式仍然满足欧姆定理、KCL、KVL、叠加法
Laplace变换是工程数学里的重要变换,主要是实现微分积分电路的代数运算,建议参看《积分变换》这书.在一阶和高阶电路中,有一些问题在频域中分析比在时域中分析要方便的多,而拉氏变换就是一个很好的分析工具。
它将时域中的信号输入,变换成S域中的信频输入,再由S域的输出,转换成时频的输出,很简洁明了,又可以分析出信号的多种变化.工程数学或者积分变换都可以解决你所提的问题.好吧
在一阶和高阶电路中,有一些问题在频域中分析比在时域中分析要方便的多,而拉氏变换就是一个很好的分析工具。
它将时域中的信号输入,变换成S域中的信频输入,再由S域的输出,转换成时频的输出,很简洁明了,又可以分析出信号的多种变化。
工程数学或者积分变换都可以解决你所提的问题。
第2+章 拉普拉斯变换的数学方法拉普拉斯变换简称拉氏变换,是分析研究线性动态系统的有力数学工具。
通过拉氏变换将时域的微分方程变换为复数域的代数方程,这不仅运算方便,使系统的分析大为简化,而且在经典控制论范畴,直接在频域中研究系统的动态特性,对系统进行分析、综合和校正,具有很广泛的实际意义。
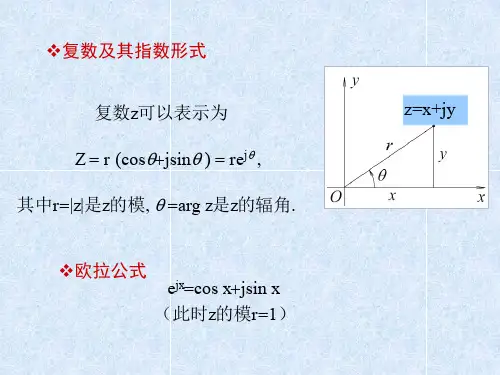
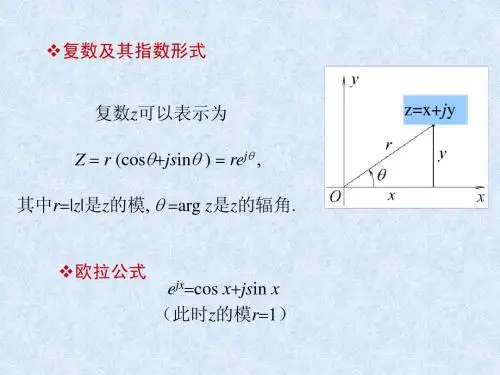
2-1 复数和复变函数1.复数的概念复数,ωσj s +=其中σ、ω均为实数,分别称为S 的实部和虚部,记做Re()s σ=,)Im(s =ωj =虚部分别相等,一个复数为零,它的实部和虚部均必须为零。
2.复数的表示方法:表达复数的直角坐标系平面称为复平面或S 平面。
(1)点表示法(2)向量表示法复数S 用从原点指向点(ωσ,)的向量来表示。
向量的长度称为复数S 的模或绝对值。
22ωσ+==r s向量与σ轴(横轴)的夹角θ称为复数的幅角,即σωθarctan =。
(3)三角表示法:由上图可看出:cos r σθ=⋅,θωsin ⋅=r 因此复数的三角表示法为:(cos sin )s r j θθ=+(4)指数表示法:利用欧拉公式:cos sin j e j θθθ=+,复数S 也可用指数表示为:j s r e θ=⋅3.复变函数、极点与零点的概念以复数ωσj s +=为自变量,按某一确定法则构成的函数G(s)称为复变函数,G(s)可写成:()G s u jv =+,在线性控制系统中,通常遇到的复变函数G(s)是S 的一个给定值,G(s)就唯一被确定。
若有复变函数 1212()()()()()()()m n k s z s z s z G s s s p s p s p ---=---当12,m s z z z =时,()0G s =,称12,z z ,·,m Z 为G(s)的零点; 当120,,n s p p p =时,()G s =∞,称120,,p p ,·,m P 为G(s)的极点。
2-2 拉氏变换与拉氏反变换的定义一、拉氏变换设有时间函数()f t ,0t ≥,则()f t 的拉氏变换记做[]()L f t 或()F s ,并定义为:[]0()()()st L f t F s f t e dt ∞-==⋅⎰ 式(2—1) 式中s 为复数,称()f t 为原函数,()F s 为象函数。
拉氏变换复数位移定理-回复拉氏变换是一种重要的数学工具,广泛应用于信号处理、控制系统分析、电路分析等领域。
在拉氏变换中,有一个重要的定理被称为拉氏变换复数位移定理。
拉氏变换复数位移定理是指函数在复平面上的位移对其拉氏变换的影响。
具体而言,如果一个函数在时域上进行了复数位移,那么在频域上,其拉氏变换会发生相应的复数尺度的压缩或拉伸。
要理解拉氏变换复数位移定理,我们首先需要了解拉氏变换的基本概念。
拉氏变换是指将一个在时域上的函数转换为在频域上的函数。
拉氏变换的数学表达式为:F(s) = L[f(t)] = ∫[0,∞] f(t)e^(-st) dt其中,F(s)表示拉氏变换后的函数,f(t)表示原始函数,s为复数变量。
通过对原始函数进行积分,利用指数衰减的特性,将函数从时域转换到频域。
现在,我们来讨论拉氏变换复数位移定理。
拉氏变换复数位移定理是指,对于一个函数f(t),如果它在时域上发生了复数位移t0,那么在频域上,其拉氏变换会发生尺度的压缩或拉伸,具体的变换关系可以通过如下公式描述:L[f(t - t0)] = e^(-st0)F(s)这里,L[f(t - t0)]表示对函数f(t)进行复数位移t0后的拉氏变换;F(s)表示函数f(t)的拉氏变换;e^(-st0)表示复数位移t0产生的衰减因子。
应用拉氏变换复数位移定理可以得到以下结论:1. 对于函数f(t - t0)的拉氏变换,在频域上会出现以e^(-st0)为因子的尺度压缩或拉伸。
如果t0大于零,那么函数在时域上发生了右移,对应的,在频域上会发生左压缩,即频率增大。
反之,如果t0小于零,函数在时域上发生了左移,对应的,在频域上会发生右拉伸,即频率减小。
2. 拉氏变换复数位移定理适用于时域上存在函数位移的情况,不仅限于实数位移,还包括复数位移。
复数位移可以看作实数位移在复平面上的推广,具有更广泛的适用性。
3. 拉氏变换复数位移定理与拉氏变换的线性性质结合起来,可以方便地分析和求解各种复杂的信号和系统。
拉氏变换复数位移定理-回复拉氏变换复数位移定理(Complex Shifting Theorem in Laplace Transform)是拉氏变换中的一个重要定理,它描述了在拉氏域中对原函数进行位移操作后其拉氏变换的相应关系。
本文将以拉氏变换复数位移定理为主题,深入介绍该定理的数学原理、应用场景以及具体的推导过程。
【引言】在探讨拉氏变换复数位移定理之前,我们先来回顾一下拉氏变换的基本概念。
拉氏变换是一种重要的数学工具,用于将一个函数从时域转换到复频域。
通过拉氏变换,我们可以将时域中的微分方程或积分方程转化为复频域中的代数方程,从而更便于求解。
【数学原理】1. 拉氏变换的定义设函数f(t)在区间[0, ∞)上可积,并满足某些充分条件,那么它的拉氏变换F(s)定义为:F(s) = L{f(t)} = ∫[0, ∞) f(t)e^(-st)dt其中,s为复变量。
2. 拉氏变换复数位移定理的表述设函数f(t)在区间[0, ∞)上可积,并满足拉氏变换的充分条件。
对任意复数a≥0,有如下关系成立:L{e^(at)f(t)} = F(s-a)其中,F(s)为f(t)的拉氏变换。
【应用场景】拉氏变换复数位移定理在信号与系统、电路分析、控制理论等领域具有广泛的应用。
下面以几个典型的应用场景为例,展示该定理的实际运用。
1. 系统响应计算在信号与系统分析中,我们经常需要计算线性时不变系统的响应。
通过使用拉氏变换复数位移定理,我们可以将输入信号的变换函数移动到系统函数的位置,从而直接得到系统的输出函数。
2. 瞬态响应分析在电路分析中,我们常常需要研究电路的瞬态响应,即在电路中加入一个初始条件或一个瞬时激励信号后,电路的暂态行为。
利用拉氏变换复数位移定理,我们可以很方便地将初始条件或瞬时激励信号的影响考虑在内,从而得到电路的瞬态响应。
3. 跨越频率边界当我们需要跨越频率边界进行信号处理时,拉氏变换复数位移定理也发挥了重要作用。
复习拉普拉斯变换的有关内容1 复数有关概念 (1)复数、复函数 复数 ωσj s += 复函数 ()y x jF F s F += 例:()ωσj 22s s F ++=+= (2)复函数模、相角()()xy 2y 2x F F arctgs F F F s F =∠+= (3)复数的共轭 ()y x jF F s F -=(4)解析:若F(s)在s 点的各阶导数都存在,称F(s)在s 点解析。
2 拉氏变换定义:()()[]()dt e t f t f L s F st0-∞⋅==⎰⎩⎨⎧:像:原F(s))(t f 3 几种常见函数的拉氏变换⑴ 单位阶跃:()⎩⎨⎧≥<=0t 10t 0t 1()[][]()s110s 1e s1dt e 1t 1L 0stst =--=-=⋅=∞-∞-⎰ ⑵ 指数函数:⎩⎨⎧≥<=0t e 0t 0)t (f at()[]as 1)10(a s 1eas 1 dte dt e e )]t (f [L 0t)a s (0t a s st 0at -=---=--==⋅=∞--∞---∞⎰⎰⑶ 正弦函数:⎩⎨⎧≥<=0t t sin 0 t 0)t (f ω (欧拉公式j e e t tj t j 2sin ωωω--=)[][][]22220t )j s (0t )j s (0)t j s ()tj -(s -st 0t j tj 0st s s 2j 2j 1 j s 1j s 12j 1 e j s 1e j s 12j 1 dt e e 2j 1 dt e e e 2j 1 dte t sin )t (f L ωωωωωωωωωωωωωωω+=+⋅=⎥⎦⎤⎢⎣⎡+--=⎥⎦⎤⎢⎣⎡+----=-=⋅-=⋅=∞+-∞--∞+--∞-∞-⎰⎰⎰4 拉氏变换的几个重要定理(1)线性性质: [])s (bF )s (aF )t (bf )t (af L 2121+=+ (2)微分定理: ()[]()()0f s F s t f L -⋅='()()()()()()()()stst 0-ststst 0f t e dt e df t e f t f t de0-f 0s f t e dt sF s f 0 ∞∞--∞∞-∞-'=⋅=⎡⎤=-⎣⎦=+⎡⎤⎣⎦=-=⎰⎰⎰⎰证明:左右()()()()()()()()()n n-2n 1n n-1n-2 L f t s F s s f 0s f 0sf 0f 0-⎡⎤'=-----⎣⎦进一步: 零初始条件下有:()()[]()s F s t f L n n ⋅=例:求[]t cos L ω 解:[]2222s ss s 1t n si L 1t cos ωωωωωωω+=+⋅⋅='=(3)积分定理:()[]()()()0f s1s F s1dt t f L 1-+⋅=⎰ (证略) 零初始条件下有:()[]()s F s1dt t f L ⋅=⎰ 进一步有:()()()()()()()()0f s 10f s 10f s 1s F s1dt t f L n 21n 1n n nn ----++++=⎥⎥⎦⎤⎢⎢⎣⎡⎰⎰⎰【重积分的表示n f f n )0()0()(-】● 例:求L[t]=? 解:()dt t 1t ⎰=[]()[]2t s 1ts1s 1s 1dt t 1L t L =+⋅==∴=⎰ ● 例:求⎥⎦⎤⎢⎣⎡2t L 2解:⎰=tdt 2t 2[]30t 222s12t s 1s 1s 1tdt L 2t L =⋅+⋅==⎥⎦⎤⎢⎣⎡∴=⎰ (4)位移定理实位移定理:()[]()s F e-t f L s⋅=-ττ ● 例:()()s F 0 t 01 t 0 10t 0t f 求⎪⎩⎪⎨⎧><<<=解:)1t (1)t (1)t (f --= ()()s s e 1s1e s1s1s F ---=⋅-=∴(5)复位移定理:()[]()a -s F t f e L at =⋅(证略) ● 例:求[]ate L:解[]()[]as 1e t 1L e L atat-=⋅= ● 例:[]()223s s 223t -53s 3s 5s s cos5t e L +++=+=⋅+→● 例:⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---)15t (5cos e L )35t (cos e L 2t2t ππ ()()222s 152s s 22s 15-52s 2s e 5s s e +++⋅=⎭⎬⎫⎩⎨⎧+=+-+→ππ (6)终值定理(极限确实存在时)()()()s F s lim f t f lim 0s t ⋅=∞=→∞→证明:由微分定理()()()0f s sF dt e t f st 0-='-∞⎰取极限:()()()0f s sF lim dt e t f lim 0s st 0s -='→-∞→⎰()[]()()()()()()0f s sF lim 0f f t f dt 1t f dt limet f 0s 000s st-==-∞==⋅⋅'='=→∞∞→-∞⎰⎰右左∴有:()() s sF lim f 0s →=∞证毕 ● 例:()()()b s a s s 1s F ++=求()f ∞解:()()()ab1b s a s s 1s lim f 0s =++=∞→● 例:()0s s limt sin f 220s t =+≠=∞→∞→ωωω拉氏变换附加作业 一. 已知f(t),求F(s)=?()1-t T111T1).f(t)1-eF s 11s s s s T T ==-=⎛⎫++ ⎪⎝⎭()22221s 0.122).f (t)0.03(1cos2t) F(s)0.03s s 2s s 2⎡⎤=-=-=⎢⎥++⎣⎦ s 15222250.866s 2.53).f (t)sin(5t ) F(s)e 3s 5s 5ππ+=+==++()0.4t 222s 0.4s 0.44).f (t)e cos12t F(s)s 0.8s 144.16s 0.412-++===++++[]05).f (t)t 11t t ⎡⎤=⋅--⎣⎦()()0t s0211t s e F s s --+=()()()223s 2s 86).F(s) f ? f(0)? f()1, f(0)0s s 2s 2s 4++=∞==∞==+++已知求 二.已知F(s),求f(t)=?()222s 5s 11).F(s) f(t)1cost-5sint s s 1-+==++()4t 24t s2).F(s) f(t)cos(t 14)s 8s 17 e cost 4sint --==+++=-t 10t321119t 3).F(s) f(t)e e s 21s 120s 1008181--+==-+++()2-2t t23s 2s 84).F(s) f(t)1-2e e s s 2(24)s s -++==+⋅+++ ()()t 3t 2s 221315).F(s) f(t)(t )e e 32412s s 1s 3--+==-++++5. 拉氏反变换 (1) 反变换公式:⎰∞+∞-=j j stds e ).s (F j 21)t (f σσπ (2) 查表法——分解部分分式(留数法,待定系数法,试凑法)f(t),)a s (s 1)s (F 1.求例+=⎥⎦⎤⎢⎣⎡+-=++=a s 1s 1a 1)a s (s s -a)(s a 1)s (.F 解 []at e 1a1)t (f --=∴ 微分方程一般形式:r b r b r b r b C C a C a C m 1-m )1-m (1)m (01-n )1-n (1)n (+'+++=+'+++ )0(:L 设初条件为[][]R(s)b s b s b s b )s (C a s a s a s a sm 1-m 1m 1m 0n 1-n 2-n 21-n 1n++++=+++++-)s (A )s (R ).s (B a s a s a s a s )R(s)b s b s b s (b C(s)n1-n 2-n 21-n 1n m 1-m 1m 1m 0=+++++++++=∴- )p s ()p s )(p s ()s (R ).s (B n 21---=∑=-=-++-+-+-=n1i ii n n 332211 p s cp s c p s c p s c p s c )s (C 特征根:p i∑==++++=∴n1i t p i tp n tp 3tp 2tp 1i n 321e c ec ec ec ec )t (f 模态:e t p i)s (F 的一般表达式为:[]r b r b r b r b C C a C a C m 1-m )1-m (1)m (01-n )1-n (1)n (+'+++=+'+++ 来自:(I ))m n (a s a s a s a s b s b s b s b )s (A )s (B )s (F n1-n 2-n 21-n 1n m 1-m 1m 1m 0>+++++++++==- 其中分母多项式可以分解因式为:)p s ()p s )(p s ()s (A n 21---= (II))s (A p i 为的根(特征根),分两种情形讨论:⑴:0)s (A =无重根时:(依代数定理可以把)s (F 表示为:)∑=-=-++-+-+-=n1i ii n n 332211p s cp s c p s c p s c p s c )s (F∑==++++=∴n1i t p i tp n tp 3tp 2tp 1i n 321e c ec ec ec ec )t (f即:若i c 可以定出来,则可得解:而i c 计算公式: )s (F ).p s (lim c i p s i i-=→(Ⅲ)ip s 'i )s (A )s (B c ==(Ⅲ′)(说明(Ⅲ)的原理,推导(Ⅲ′) ) ● 例2:34s s 2s )s (F 2+++= 求?)t (f = 解:3s c1s c 3)1)(s (s 2s )s (F 21+++=+++=2131213)1)(s (s 2s )1s (lim c 1s III1=+-+-=++++=-→2113233)1)(s (s 2s )3s (lim c 3s III2=+-+-=++++=-→3s 211s 21)s (F +++=∴ 3t t e 21e 21)t (f --+=∴ ● 例3:34s s 55s s )s (F 22++++= ,求?)t (f =解:不是真分式,必须先分解:(可以用长除法)3)1)(s (s 2s 134s s 2s 3)4s (s )s (F 22++++=++++++= 3t t e 21e 21)t ()t (f --++=∴δ● 例4:j1s c j -1s c j)1j)(s -1(s 3s 22s s 3s )s (F 212++++=++++=+++=解法一:2j j2j)1j)(s -1(s 3s )j -1s (lim c j1s 1+=+++++=+-→ 2jj-2j)1j)(s -1(s 3s )j 1s (lim c j-1s 2-=++++++=-→ j)t1(t )j 1(e2jj -2e 2j j 2)t (f --+--+=∴ []jt-jt t e )j 2(e )j 2(e 2j 1--+=- (t e e t j e e jt jt jt jt cos 2,sin 2=+=--- ) [])2sint cost (e j 4sint 2cost e 2j1t t+=+=-- 1)1s (21)1s (1s 1)1s (21s 1)1s (3s )s (F 2222++++++=++++=+++=t t e .2sint e .cost )t (f --+=∴虚位移定理解法二:)( sint .2e cost .e )t (f 11)(s 1211)(s 1s 11)(s 21s 11)(s 3s )s (F t t 22222222复位移定理--+=++++++=++++=+++=⑵:0)s (A =有重根时:设1p 为m 阶重根,n 1m s ,s +为单根 .则)s (F 可表示为:nn1m 1m 111-m 11-m m 1m p -s c p -s c p -s c )p -(s c )p -(s c )s (F ++++++=++ 其中单根n 1m c ,c +的计算仍由(1)中公式(Ⅲ) (Ⅲ′)来计算. 重根项系数的计算公式:(说明原理)[][][]⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧-=-=-=-=→→→→)s (F .)p s (ds d lim 1)!-(m 1c )s (F .)p s (ds d lim j!1c (IV) )s (F .)p s (ds d lim c )s (F .)p s (lim c m 1p s 1-m 1)-(m 1m1p s j (j)j -m m 1p s 1-m m 1p s m 1111[]V)( e c e .c t c t )!2m (c t )!1m (c p -s c p -s c p -s c )p -(s c )p -(s c L )s (F L )t (f t p n1m i i t p 122m 1-m 1m m n n 1m 1m 111-m 11-m m 1m 11i 1∑+=--++--+⎥⎦⎤⎢⎣⎡+++-+-=⎥⎦⎤⎢⎣⎡++++++==∴ ●例5 3)(s 1)s(s 2s )s (F 2+++= 求?)t (f =解:3s c s c 1s c 1)(s c )s (F 43122++++++=21)31)(1(213)(s 1)s(s 2s 1)(s lim c 221s IV2-=+--+-=++++=-→ 43)3(])3)[(2()3(lim 3)(s 1)s(s 2s 1)(s ds d limc 221221s IV1-=++++-+=⎥⎦⎤⎢⎣⎡++++=-→-→s s s s s s s s 323)(s 1)s(s 2s s.lim c 20s 3=+++=→1213)(s 1)s(s 2s 3).(s lim c 2-3s 4=++++=→ 3s 1.121s 1.321s 1.431)(s 1.21)s (F 2++++-+-=∴3t t t e 12132e 43te 21)t (f ---++--=∴。