运动分析模型
- 格式:doc
- 大小:388.03 KB
- 文档页数:8
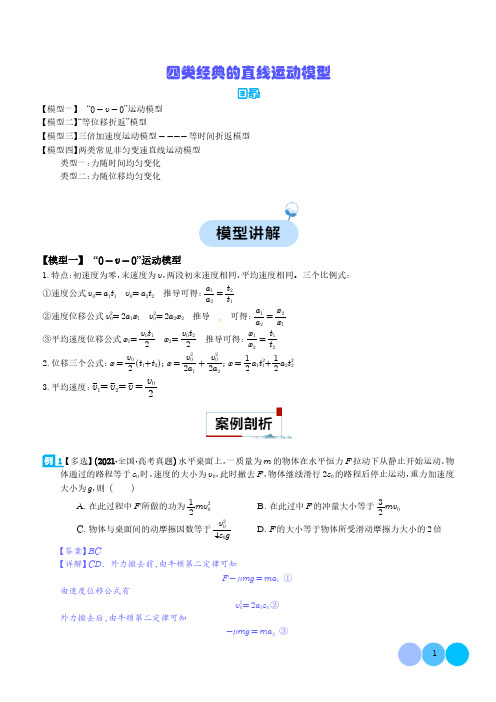
四类经典的直线运动模型目录【模型一】“0-v -0”运动模型【模型二】“等位移折返”模型【模型三】三倍加速度运动模型----等时间折返模型【模型四】两类常见非匀变速直线运动模型类型一:力随时间均匀变化类型二:力随位移均匀变化【模型一】“0-v -0”运动模型1.特点:初速度为零,末速度为v ,两段初末速度相同,平均速度相同。
三个比例式:①速度公式v 0=a 1t 1v 0=a 2t 2推导可得:a1a 2=t 2t 1②速度位移公式v 20=2a 1x 1v 20=2a 2x 2推导可得:a1a 2=x 2x 1③平均速度位移公式x 1=v 0t 12x 2=v 0t 22推导可得:x 1x 2=t1t 22.位移三个公式:x =v 02(t 1+t 2);x =v 202a 1+v 202a 2;x =12a 1t 21+12a 2t 223.平均速度:v 1=v 2=v=v 021【多选】(2021·全国·高考真题)水平桌面上,一质量为m 的物体在水平恒力F 拉动下从静止开始运动,物体通过的路程等于s 0时,速度的大小为v 0,此时撤去F ,物体继续滑行2s 0的路程后停止运动,重力加速度大小为g ,则()A.在此过程中F 所做的功为12mv 20 B.在此过中F 的冲量大小等于32mv 0C.物体与桌面间的动摩擦因数等于v 24s 0g D.F 的大小等于物体所受滑动摩擦力大小的2倍【答案】BC【详解】CD .外力撤去前,由牛顿第二定律可知F -μmg =ma 1 ①由速度位移公式有v 20=2a 1s 0②外力撤去后,由牛顿第二定律可知-μmg =ma 2 ③由速度位移公式有-v20=2a2(2s0) ④由①②③④可得,水平恒力F=3mv20 4s0动摩擦因数μ=v20 4gs0滑动摩擦力F f=μmg=mv20 4s0可知F的大小等于物体所受滑动摩擦力大小的3倍,故C正确,D错误;A.在此过程中,外力F做功为W=Fs0=34mv20故A错误;B.由平均速度公式可知,外力F作用时间t1=s00+v02=2s0v0在此过程中,F的冲量大小是I=Ft1=32mv0故B正确。

数学建模-单摆的运动分析(总5页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--对大幅度单摆运动周期公式的研究\摘要单摆作为经典的力学模型,已被众多学者加以研究。
多数关于单摆的研究都以摆角小于5度为限,将单摆运动周期近似拟合为在重力和绳拉力下合力的简谐运动的周期。
这阻碍了我们对单摆运动周期的进一步探索。
此次我们先用力学原理对单摆运动做一般性分析,再通过数学手法简化运动公式,从而得出一般情况下单摆的周期公式,并使用插值法求解出最终结果。
关键字大幅度单摆运动周期公式一问题重述通常对于小幅度(θ≤5。
)的单摆运动周期可以近似拟用简谐运动周期公式求解。
现在我们试图探究如何求解大幅度单摆运动的周期,并推导出近似公式。
二问题分析单摆的摆球在重力,摆线拉力的联合作用下做大幅度摆动(θ≥5。
)。
其运动轨迹可以通过力学分析得到基本运动公式,并以此推导出周期公式。
最后通过数学手段简化得出数学解析式。
三基本假设1空气对单摆运动的阻力和浮力是如此之小,以至于可以忽略且并不对问题的研究产生交大影响。
2摆线是一根柔软且无弹性的轻线。
四符号说明角速度ωrad/s五模型建立和求解1.模型建立一个质量为m的小球由一根轻质的长度为L的刚性细绳悬挂在一个固定的支架上(小球半球远远小于细绳长度),小球在重力的作用下可在垂直平面内来回摆动(不考虑空气阻力),单摆的受力分析图如下:2.模型的求解(即求解大幅摆角单摆运动周期的解析式)由牛顿第二定律:(1)式(1)是关于θ(角位移)、g(重力加速度)、l(摆长)的一般普遍公式。
若给定初始条件,式(1)的任意精度的数值解是可以求出来的.当5。
式可由近似求解。
但是当。
由于误差增大,不能再由上述近似条件求解。
通过数值模拟求解的方法可得。
当单摆的摆动角度>5°,由于系统的机械能守恒,从能量的观点出发也可以求解单摆周期的精确解,这样就不需要详细讨论式(1)非线性微分方程。

2024版新课标高中物理模型与方法竖直面内的圆周运动模型目录一.一般圆周运动的动力学分析二.竖直面内“绳、杆(单、双轨道)”模型对比分析三.竖直面内圆周运动常见问题与二级结论三.过拱凹形桥模型一.一般圆周运动的动力学分析如图所示,做圆周运动的物体,所受合外力与速度成一般夹角时,可将合外力沿速度和垂直速度分解,则由牛顿第二定律,有:Fτ=maτ,aτ改变速度v的大小F n=ma n,a n改变速度v的方向,a n=v2r作一般曲线运动的物体,处理轨迹线上某一点的动力学时,可先以该点附近的一小段曲线为圆周的一部分作曲率圆,然后即可按一般圆周运动动力学处理。
Fτ=maτ,aτ改变速度v的大小F n=ma n,a n改变速度v的方向,a n=v2ρ,ρ为曲率圆半径。
二.竖直面内“绳、杆(单、双轨道)”模型对比分析轻绳模型(没有支撑)轻杆模型(有支撑)常见类型过最高点的临界条件由mg=mv2r得v临=gr由小球能运动即可得v临=0对应最低点速度v低≥5gr对应最低点速度v低≥4gr绳不松不脱轨条件v低≥5gr或v低≤2gr不脱轨最低点弹力F低-mg=mv低2/rF低=mg+mv低2/r,向上拉力F低-mg=mv低2/rF低=mg+mv低2/r,向上拉力最高点弹力过最高点时,v≥gr,F N+mg=mv2r,绳、轨道对球产生弹力F N=mv2r-mg向下压力(1)当v=0时,F N=mg,F N为向上支持力(2)当0<v<gr时,-F N+mg=m v2r,F N向上支持力,随v的增大而减小(3)当v=gr时,F N=0(4)当v>gr时,F N+mg=m v2r,F N为向下压力并随v的增大而增大在最高点的F N 图线取竖直向下为正方向取竖直向下为正方向三.竖直面内圆周运动常见问题与二级结论【问题1】一个小球沿一竖直放置的光滑圆轨道内侧做完整的圆周运动,轨道的最高点记为A 和最低点记为C ,与原点等高的位置记为B 。

专题01几种匀变速直线运动模型1.[模型导航]【模型一】刹车模型1【模型二】“0-v-0”运动模型2【模型三】反应时间与限速模型61.先匀速,后减速运动模型--反应时间问题82.先加速后匀速运动模型--限速问题83.先加速后匀速在减速运动模型--最短时间问题9【模型四】双向可逆类运动模型10【模型五】等位移折返模型13【模型六】等时间折返模型152.[模型分析]【模型一】刹车模型【概述】指匀减速到速度为零后即停止运动,加速度a突然消失,求解时要注意确定其实际运动时间【模型要点】(1)刹车问题在实际生活中,汽车刹车停止后,不会做反向加速运动,而是保持静止。
(2)题目给出的时间比刹车时间长还是短?若比刹车时间长,汽车速度为零.若比刹车时间短,可利用公式v= v0+at直接计算,因此解题前先求出刹车时间t0。
(3)刹车时间t0的求法.由v=v0+at,令v=0,求出t0便为刹车时间,即t0=-v0 a。
(4)比较t与t0,若t≥t0,则v=0;若t<t0,则v=v0+at。
(5)若t≥t0,则v=0,车已经停止,求刹车距离的方法有三种:①根据位移公式x=v0t+12at2,注意式中t只能取t;②根据速度位移公式-v20=2ax;③根据平均速度位移公式x=v0 2t.1据了解,CR300AF型复兴号动车组是拥有完全自主国产研发的中国标准动车组体系中的新车型。
该车型设计时速为300千米每小时,外观呈淡蓝色,运行平稳舒适、乘坐环境宽敞明亮、列车噪音低、振动小,除此之外复兴号动车组全车覆盖免费wifi,且每两个座椅有一个插座。
假设一列复兴号动车进站时从某时刻起做匀减速直线运动,分别用时3s、2s、1s连续通过三段位移后停下,则这三段位移的平均速度之比是()A.9:4:1B.27:8:1C.5:3:1D.3:2:1【解答】解:可将动车减速过程看作初速度为0的加速过程,根据匀变速直线运动规律可知最后3s、2s、1s连续通过三段位移的比为27:8:1,根据平均速度的计算公式v =x t,可知这三段位移的平均速度之比是9:4:1,故A正确,BCD错误;故选:A。

物体自由落体运动模型推导步骤解析物体自由落体运动是指物体仅受重力作用,没有空气阻力等其他外力的情况下进行的运动。
在物理学中,我们可以通过推导来建立物体自由落体运动的模型,以便更好地理解和描述这种运动。
1. 初步分析首先,我们需要明确物体自由落体运动的特点以及相关概念。
自由落体意味着物体的运动只受到重力的作用,无其他外力干扰。
在地球表面附近,重力可近似视为与物体质量成正比的恒定力。
我们可以用重力加速度g来表示重力的大小,通常取9.8 m/s²。
2. 建立坐标系为了对物体的自由落体运动进行详细描述,我们需要建立一个适当的坐标系。
我们可以选择建立一个竖直向上为正方向的坐标系,其中物体的初始位置设为原点,向上为正方向,向下为负方向。
这样的坐标系便于我们对物体的位移与速度进行符号化的描述。
3. 描述物体的位移接下来,我们通过对物体的位移进行分析来推导出自由落体运动的模型。
位移是指物体从初始位置到末位置的距离及方向。
根据坐标系的选择,自由落体运动的位移可以表示为负值,因为物体的运动方向是向下的。
物体自由落体运动的位移可以用以下公式进行描述:S = v₀t + 1/2gt²其中S表示位移,v₀为物体的初始速度,t为时间,g为重力加速度。
4. 推导物体的速度由于物体自由落体运动的特点是重力是恒定的,因此物体的速度也在不断地变化。
我们可以通过对速度进行推导得到自由落体运动的速度模型。
物体的速度是指物体的位移随时间的变化率。
根据位移公式,我们可以对其进行微分,得到速度的表达式:v = ds/dt = v₀ + gt其中v表示速度。
5. 推导物体的加速度在自由落体运动中,物体受到的控制性力只有重力,不受其他力的干扰。
根据牛顿第二定律,物体的加速度可以表示为受到的控制性力除以物体的质量。
由于物体的质量在自由落体运动中保持不变,因此物体的加速度只与重力有关。
根据重力加速度的定义与牛顿第二定律,我们可以得到自由落体运动的加速度模型:a = F/m = g其中a表示加速度,F表示力,m表示物体的质量,g表示重力加速度。
高中物理力学44个模型物理力学是高中物理学习的一个重要组成部分,通过学习力学,我们可以了解物体运动的规律和力的作用。
在学习力学的过程中,模型是非常重要的工具,可以帮助我们更好地理解抽象的物理概念。
下面将介绍高中物理力学中的44个模型,帮助大家深入了解力学知识。
1.质点模型:假设物体的大小可以忽略不计,只考虑物体的质量和位置。
2.运动学模型:研究物体运动的基本规律,包括位移、速度、加速度等。
3.匀速直线运动模型:物体在力的作用下保持匀速直线运动。
4.变速直线运动模型:物体在力的作用下速度不断改变的直线运动。
5.抛体模型:研究物体抛出后在重力作用下的轨迹运动。
6.牛顿第一定律模型:物体静止或匀速直线运动状态保持不变的定律。
7.牛顿第二定律模型:物体的加速度与作用力成正比,与物体质量成反比的定律。
8.牛顿第三定律模型:任何两个物体间的相互作用力大小相等,但方向相反。
9.惯性系模型:描述物体的力学规律需要建立的参考系。
10.非惯性系模型:在非惯性系中描述物体的力学规律需要引入惯性力。
11.作图模型:通过绘制物体受力情况的示意图来帮助分析解题。
12.叠加原理模型:将多个力合成一个合力来简化分析。
13.平衡模型:研究物体所受力使合力为零的情况,包括静平衡和动平衡。
14.弹簧模型:弹簧的伸长或压缩与受力大小成正比的物理模型。
15.胡克定律模型:描述弹簧弹性力与伸长(压缩)长度成正比的定律。
16.重力模型:物体受重力作用下的运动规律,包括自由落体和斜抛运动。
17.动力学模型:研究物体受到的力对其运动状态的影响。
18.动能模型:物体由于运动而具有的能量。
19.势能模型:物体由于位置或形状而具有的能量。
20.机械能守恒模型:封闭系统机械能总量在没有非弹性碰撞的条件下保持不变。
21.动量模型:描述物体运动状态的物理量,是质量与速度的乘积。
22.动量守恒模型:封闭系统内动量总量在无外力作用下保持不变。
23.质心模型:多个物体的质心位置与各物体质量与位置的加权平均值。
行星运动的数学模型及轨道分析引言:行星运动一直以来都是人们关注和研究的话题之一。
通过数学建模和轨道分析,我们可以更深入地了解行星运动的规律和特性。
本文将探讨行星运动的数学模型以及轨道分析的方法。
一、行星运动的数学模型行星运动的数学模型是基于牛顿万有引力定律的。
该定律表明,两个物体之间的引力与它们的质量成正比,与它们之间的距离的平方成反比。
根据这一定律,我们可以用以下公式表示行星的运动:F =G * (m1 * m2) / r^2其中,F表示两个物体之间的引力,G是万有引力常数,m1和m2分别是行星和太阳的质量,r是行星和太阳之间的距离。
数学模型的关键是求解行星的运动轨迹,通常使用数值模拟的方法。
将行星的质量、初始位置和速度输入计算机程序,利用欧拉法或其他数值计算方法,我们可以得到行星在各个时间点上的位置和速度,并通过连续的计算得到整个行星运动轨迹。
二、行星轨道的分析行星轨道分析的目的是了解行星运动的规律和特性。
通过分析行星的轨道,我们可以研究行星的运动周期、轨道形状以及行星之间的相互影响。
1. 运动周期行星的运动周期是指行星绕太阳完成一次运动所需的时间。
根据开普勒第三定律,行星的运动周期与它的轨道半长轴的立方成正比。
因此,通过观测行星的运动轨迹,我们可以计算出它的运动周期,并进一步了解行星运动的规律。
2. 轨道形状行星的轨道形状通常是椭圆。
根据开普勒第一定律,行星绕太阳运动的轨道是一个椭圆,太阳位于椭圆的一个焦点上。
通过测量行星在不同时刻的位置和速度,利用椭圆的方程,我们可以确定行星的轨道参数,如椭圆的长轴、短轴以及离心率等,从而推测行星的轨道形状。
3. 相互影响行星之间的相互影响是行星运动的另一个重要方面。
根据牛顿引力定律,行星之间的引力会影响它们的运动轨道。
特别是在行星相互靠近的时候,它们的轨道可能会发生变化。
通过数值模拟和轨道计算,我们可以研究行星之间的相互作用,进一步了解行星运动的规律。
模型07 板块相对运动模型(解析版)两种类型 类型图示 规律分析木板B 带动物块A ,物块恰好不从木板上掉下的临界条件是物块恰好滑到木板左端时二者速度相等,则位移关系为x B =x A +L物块A 带动木板B ,物块恰好不从木板上掉下的临界条件是物块恰好滑到木板右端时二者速度相等,则位移关系为x B +L=x A此类问题涉及两个物体、多个运动过程,并且物体间还存在相对运动,所以应准确求出各物体在各运动过程的加速度(注意两过程的连接处加速度可能突变),找出物体之间的位移(路程)关系或速度关系是解题的突破口。
求解中更应注意联系两个过程的纽带,每一个过程的末速度是下一个过程的初速度。
【典例1】如图所示,将小砝码置于桌面上的薄纸板上,用水平向右的拉力将纸板迅速抽出,砝码的移动很小,几乎观察不到,这就是大家熟悉的惯性演示实验。
若砝码和纸板的质量分别为1m 和2m ,各接触面间的动摩擦因数均为μ。
重力加速度为g 。
(1)当纸板相对砝码运动时,求纸板所受摩擦力的大小;(2)要使纸板相对砝码运动,求所需拉力的大小;(3)本实验中, 1m =0。
5kg , 2m =0。
1kg , μ=0。
2,砝码与纸板左端的距离d=0。
1m ,取g=102/m s 。
若砝码移动的距离超过l =0。
002m ,人眼就能感知。
为确保实验成功,纸板所需的拉力至少多大?【答案】(1) 12(2)f m m g μ=+ (2) 122()F m m g μ>+ (3) 22.4F N =【解析】(1)砝码对纸板的摩擦力 11f m g μ= 桌面对纸板的摩擦力 212()f m m g μ=+ 12f f f =+ 解得 12(2)f m m g μ=+(2)设砝码的加速度为1a ,纸板的加速度为2a ,则111f m a = 1222F f f m a --= 发生相对运动 21a a >解得 122()F m m g μ>+(3)纸板抽出前,砝码运动的距离121112x a t =纸板运动的距离212112d x a t += 纸板抽出后,砝码在桌面上运动的距离 223212x a t = 12l x x =+ 由题意知 131132,a a a t a t == 解得 122[(1)]d F m m g l μ=++ 代入数据得 22.4F N =【变式训练1】(多选)如图所示,一足够长的木板静止在粗糙的水平面上,t=0时刻滑块从木板的左端以速度v 0水平向右滑行,木板与滑块间存在摩擦,且最大静摩擦力等于滑动摩擦力。
天体运动模型分析(四大类)中星模型1. 为研究太阳系内行星的运动,需要知道太阳的质量,已知地球半径为R ,地球质量为m ,太阳与地球中心间距为r ,地球表面的重力加速度为g ,地球绕太阳公转的周期为T 。
则太阳的质量为( ) A.4π2r 3T 2R 2g B.T 2R 2g4π2mr 3 C.4π2mgr 2r 3T 2 D.4π2mr 3T 2R 2g 2. 为了测量某行星的质量和半径,宇航员记录了登陆舱在该行星表面做圆周运动的周期T ,登陆舱在行星表面着陆后,用弹簧称称量一个质量为m 的砝码读数为N 。
已知引力常量为G 。
则下列计算中错误的是:( )A .该行星的质量为B .该行星的半径为C .该行星的密度为D .在该行星的第一宇宙速度为3. 过去几千年来,人类对行星的认识与研究仅限于太阳系内,行星“51 peg b”的发现拉开了研究太阳系外行星的序幕。
“51 peg b”绕其中心恒星做匀速圆周运动,周期约为4天,轨道半径约为地球绕太阳运动半径的,该中心恒星与太阳的质量比约为( ) (A ).(B ).1 (C ).5 (D ).104. 采用不同的方法来估算银河系的质量,会得出不同的结果。
例如按照目侧估算,在离恨河系中心距离R=3109R 0的范围内聚集的质量M=1.51011M 0,其中R 0是地球轨道半径,M 0是太阳质量。
假设银河系的质量聚集在中心,如果观测到离银河系中心距离R 处的一颗恒星的周期为T=3. 75108年,那么银河系中半径为R 的球体内部未被发现的天体的质量约为( ) A 、4.01010 M 0 B 、1.91011M 0 C 、4.01011 M 0 D 、5.51011 M 05. 最近美国宇航局公布了开普勒探测器最新发现的一个奇特的行星系统,命名为“开普勒-11行星系统”,该系统拥有6颗由岩石和气体构成的行星围绕一颗叫做“kepler -11”的类太阳恒星运行。
简单机构的建模和分析
机构是由多个构件组成,各个构件之间通过运动副连接起来。
各个构件之间按照运动关系进行装配,施加驱动以及力的边界条件,对该机构进行动力学求解。
通过求解可以得到各个构件的位置、速度、加速度以及构件上的受力。
在这个实例中,机构由两个构件组成。
通过在滑动体和大地之间建立一个运动副,再在机构上定义一个驱动,求解后可以察看整个机构的运动情况。
机构组成如下图所示,红色的套筒代表与大地固定的体,绿色的圆柱代表滑动体。
一、启动b motion模块
在桌面上双击你的b图标,选择File Open,找到你保存模型文件的位置,出现如下界面。
二、定义圆柱运动副
在定义一个多体运动模型时,有许多可选单元。
每个单元都有相关的图标快捷方式,在机构设计平台上都可一一找到。
选择哪个单元,相应的按钮就会变亮。
在b motion中定义一个圆柱副需要选择两根轴,定义的旋转轴都属于相应的体,通过圆柱副相连的两个体能沿轴相互滑动和转动。
1、在特征树上双击Analysis Model激活机构设计平台。
2、点击固定副(Bracket Joint)右下角的下拉箭头,在下拉
出的运动副库中选择圆柱副(Cylindrical Joint),弹出如
下所示的圆柱运动副定义对话框。
对话框说明要完成圆柱副的定义,需要选择两个体,每个体用一根轴代替。
在选轴之前我们看到每个选框里都是No Selection,一旦选择了体,选框会有对应的显示。
3、将鼠标指向代表与大地固连的红色套筒,当鼠标移到几何体附
近时就会出现一根轴,如下所示当套筒的中心轴高亮度显示时就按下鼠标键选定。
马上可以看到在圆柱副定义对话框的Body1后面的轴选框就变了。
4、将鼠标指向代表滑动体的绿色实体附近,等中心轴高亮度显示
后按下鼠标键选定,看到在圆柱副定义对话框的Body2后面
的轴选框也变了。
选择OK关闭轴运动副定义对话框,两个构件同时也装配到了一起。
三、在圆柱副上施加一个运动副驱动
在圆柱副上施加的运动副驱动,定义这两个用圆柱副装配起来的体的相互之间的轴向运动和绕轴的转动。
1、点击Create Difference Constraint 右下角的箭头,在下拉出
的约束库中选择Create Joint Driver 图标,弹出如下对话框。
2、在Joint后面的选框里选择Cylindrical Joint,在TYPE后面的选
框里选择REL.TRANS。
3、在Function后面的选框里点击右键,在下拉菜单中选择New,弹
出如下所示的TimeLength Function定义对话框。
在Function Type 选框选择HARMONIC。
这时在详细的模型子结构中Analysis Model Data下出现一个新的分支TimeLength Function.1。
4、为完成这个函数,需要确定四个参数,其中第一个是系统默认的,
它代表两个通过圆柱运动副连接的体在连接点的初始偏移量。
第二个参数填20mm,代表这两个体在轴向有20mm的振动位移,第三个参数填45turn_mn,代表转速。
点击OK关闭TimeAngle Function对话框,再点击OK关闭Joint Driver Definition对话框。
四、求解
1、双击Analysis Model → AnalysisCase.1下的Solution Set,弹
出Solution Set对话框,对各求解参数进行设置。
点击OK
关闭Solution Set对话框。
2、选择Compute Solution 按钮进行求解。
五、结果仿真
在Analysis Model → AnalysisCase.1下面选择Solution Set,
点击Animate 按钮,弹出仿真对话框。
点击Parameters
按钮,在采样步长Sampling Step填0.05s,关闭player
parameters设置对话框,点击Play Forward 按钮。
通过仿
真我们可以看到滑动体将沿轴向与套筒(代表大地)发生相对位移。
六、在圆柱副上重新施加一个运动副驱动
1、在Analysis Model → Constraints下双击Joint Driver.1,弹出Joint
Driver对话框,在TYPE选框选择REL.ANGLE.
2、在Function后面的选框里点击右键,在下拉菜单中选择New,
弹出TimeAngle Function定义对话框,在Function Type选框选择HARMONIC.这时在详细的模型子结构中Analysis Model →Data下出现一个新的分支TimeAngle Function.1。
3、和上面施加第一个运动副驱动一样,函数的第一个参数为系统
默认,第二个参数填20deg,第三个参数填45turn_mn.
4、点击OK关闭TimeAngle Function对话框,再点击OK关闭Joint
Driver Definition对话框。
七、插入一个新的分析
从主菜单选择Insert →New Analysis Case,点击OK关闭Analysis Case对话框,这时在Analysis Model下应出现一个新的分支AnalysisCase.2。
八、运行新的分析
双击Analysis Model →AnalysisCase.1下的Solution Set,弹出
Solution Set对话框,可以对各求解参数进行设置。
点击OK关闭
Solution Set对话框。
选择Compute Solution 按钮进行求解。
九、仿真新的分析结果
在Analysis Model AnalysisCase.1下面选择Solution Set,点击
Animate 按钮,弹出仿真对话框。
点击Parameters 按钮,在采样步长Sampling Step填0.05s。
关闭player parameters设置对话框,
点击Play Forward 按钮仿真模型。
十、分析结果后处理
从机构设计平台中点击运动曲线绘制按钮,会弹出如下所示的曲线绘制窗口。
在左上角Analysis Case后面选择AnalysisCase.2,在曲线图绘制中,X轴系统自动设为仿真时间,Y轴自己选择所需结果。
在这里Element后的Type项下拉选择Body,Viriable后的Type项下拉选择Length,在下面就过滤出分析中的可选项。
选择part2(2.1):z,就能在曲线图的Y轴上绘出滑动体slider在全球坐标中z方向(轴向)的任一时刻的位置。
完成曲线绘制的设置后,点击曲线创建按钮,在右边的plots manager中我们就可以看到出现了一个新的分支。
点击新曲线展示按钮,在弹出的New Function Display对话框中选择2D Plots,点击Finish。
在弹出的窗口中右击选择Select Data,弹出Select Data窗口,选择***AnalysisCase*** SYSTEM:Time_Slider:x option,出现如下所示的曲线图,代表滑动体slider在全球坐标中z方向(轴向)的任一时刻的位置。
保存模型。