基于结构光和双目视觉的三维重构(150510)PPT课件
- 格式:ppt
- 大小:2.36 MB
- 文档页数:22
双目视觉三维重建技术方法双目视觉三维重建技术可有趣啦。
双目视觉呢,就好比我们的两只眼睛看东西一样。
它主要是利用两个摄像机从不同的角度去拍摄同一个场景。
这两个摄像机的位置就像我们的两只眼睛,有一定的间距哦。
那它是怎么实现三维重建的呢?其中一个关键的部分就是特征提取。
就像是在一幅画里找到那些特别的标记点。
比如说在一幅风景图里,那些独特的石头轮廓、树的形状特别的部分,这些就可以被当作特征点。
从两个摄像机拍摄的图像里找到对应的特征点,这就像玩一个找相同但是又有点不同的游戏呢。
接下来就是计算视差啦。
视差这个词听起来有点高大上,其实简单理解就是因为两个摄像机位置不同,同一个特征点在两张图像里的位置有差异。
这个差异就包含着很重要的信息。
通过这个视差,我们就能大概知道这个特征点离我们有多远。
就好像我们的眼睛看东西,近的东西在两只眼睛里的位置差异大,远的东西位置差异小。
然后呢,根据这些视差信息和摄像机的一些参数,像是焦距啊之类的,就可以计算出这个点在三维空间里的坐标啦。
这就像是把平面的东西,一下子变得立体起来。
在实际应用里,双目视觉三维重建技术用处可大啦。
在机器人领域,机器人可以通过这个技术更好地感知周围的环境,就像给机器人装上了一双智能的眼睛。
它能知道前面有什么东西,是障碍物还是它要寻找的目标,还能知道这些东西离自己有多远,这样机器人就能更灵活地行动啦。
在虚拟现实和增强现实方面,也离不开它。
可以让虚拟的东西更好地和现实场景融合,让我们感觉那些虚拟的物体就像是真实存在于我们周围的环境里一样。
不过呢,双目视觉三维重建技术也有它的小烦恼。
比如说在光线不好的情况下,提取特征点就会变得困难,就像我们在黑暗里看东西看不太清那些特别的地方一样。
还有,如果两个摄像机的标定不准确,就像我们的两只眼睛看东西不协调了,那计算出来的三维信息可能就会有偏差呢。
但是随着技术的不断发展,这些小问题也在慢慢地被解决啦。
基于双目立体视觉的三维重构研究一、本文概述随着科技的不断发展,三维重构技术在许多领域,如机器人导航、自动驾驶、虚拟现实、增强现实、医疗诊断以及工业检测等,都发挥着越来越重要的作用。
在众多三维重构技术中,基于双目立体视觉的三维重构方法因其设备简单、成本低廉、实时性强等特点而备受关注。
本文旨在探讨基于双目立体视觉的三维重构技术的研究现状、基本原理、关键技术和应用前景,以期对这一领域的研究者和实践者提供有益的参考和启示。
本文将首先介绍双目立体视觉三维重构的基本原理,包括双目视觉的成像模型、立体匹配算法以及三维坐标计算等。
接着,将详细分析当前双目立体视觉三维重构技术中的关键问题,如视差计算、图像预处理、遮挡和纹理映射等,并探讨相应的解决方法和技术。
本文还将对双目立体视觉三维重构技术在不同领域的应用案例进行介绍,分析其优势和局限性,并展望未来的发展趋势和应用前景。
通过本文的研究,我们希望能够为基于双目立体视觉的三维重构技术的发展提供新的思路和方法,推动这一领域的技术进步和应用发展。
我们也希望本文能够为相关领域的学者和工程师提供有益的参考和借鉴,共同推动三维重构技术的发展和应用。
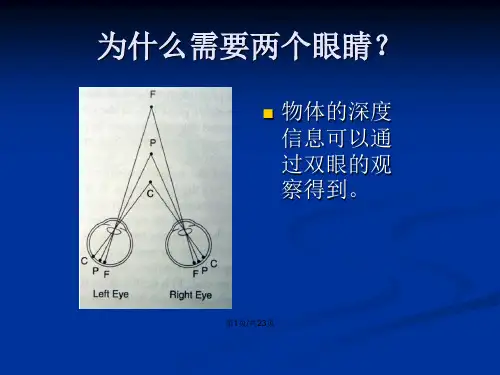
二、双目立体视觉原理双目立体视觉是人类和许多动物天生具备的一种空间感知能力,通过两只眼睛从稍微不同的角度观察物体,然后大脑综合这两个不同的视觉信号,形成立体视觉。
这种视觉原理为三维重构提供了重要的理论基础。
在双目立体视觉系统中,两个相机(模拟双眼)从不同的位置观察同一物体,得到两幅具有视差的图像。
视差是指同一物体在左右两幅图像中的像素坐标之差。
视差的大小取决于相机的基线距离(两个相机光心之间的距离)和物体到相机的距离。
物体距离相机越近,视差越大;物体距离相机越远,视差越小。
为了从这两幅图像中恢复物体的三维形状,我们需要利用三角测量的方法。
在三角测量中,我们知道相机的内外参数(包括相机的内参矩阵、畸变系数、旋转矩阵和平移向量等),通过匹配两幅图像中的同名点(即同一物体在两个图像中的像素坐标),可以计算出这些点在世界坐标系中的三维坐标。
基于双目线结构光的三维重建及其关键技术研究基于双目线结构光的三维重建是一种常见的三维重建方法,在计算机视觉和图像处理领域有广泛应用。
本文将探讨双目线结构光三维重建的基本原理和关键技术。
一、基本原理双目线结构光的三维重建基于以下原理:通过投射具有特定空间编码的光线,利用摄像机捕捉图像,并对图像进行处理和分析,可以推断出场景中物体的三维形状和深度信息。
二、关键技术1. 双目成像双目成像是双目线结构光重建的基础。
通过使用两个物理上分开的相机,可以获取场景的不同视角,从而获得更多的信息,提高重建的精度和稳定性。
2. 线结构光投影线结构光投影是双目线结构光重建的核心技术。
通过投射特定编码的结构光,可以在场景中形成一系列光条或光带,从而在摄像机中产生对应的图像。
这样,可以通过分析图像中结构光的失真或形状变化,来推断物体表面的深度信息。
3. 结构光编码结构光编码是双目线结构光重建的重要组成部分。
通过在结构光中引入编码,可以增加光条或光带的区分度,从而提高重建的精度。
常见的编码方法包括灰度编码、正弦编码、校正编码等。
4. 影像获取与处理双目线结构光重建需要获取并处理图像数据。
影像获取涉及到摄像机的标定、同步和触发等技术,以确保双目系统的准确性和稳定性。
影像处理包括去噪、校准、纹理映射等步骤,以提取出有效的结构光信息,并进行后续的三维重建处理。
5. 三维重建算法三维重建算法是双目线结构光重建的核心内容。
常见的算法包括三角测量、立体匹配、点云拼接等。
这些算法通过分析不同视角的结构光图像,通过匹配和计算来推断物体的三维形状和深度信息。
6. 点云处理与可视化三维重建通常最终呈现为点云模型。
点云处理涉及到点云滤波、配准、分割等技术,以去除噪声、合并重叠点云、提取物体表面等。
点云可视化则将点云数据以直观的形式呈现,便于人们观察和理解。
综上所述,基于双目线结构光的三维重建是一种常见的三维重建方法。
它利用投射特定编码的结构光,结合双目成像和影像处理技术,通过分析图像中的结构光信息,推断物体的三维形状和深度信息。