摆动导杆机构
- 格式:pps
- 大小:106.50 KB
- 文档页数:22
摆动导杆机构课程设计一、课程目标知识目标:1. 学生能理解并掌握摆动导杆机构的基本概念、工作原理及其在工程中的应用。
2. 学生能够描述摆动导杆机构的运动特性,包括运动轨迹、速度和加速度的变化规律。
3. 学生能够运用相关的数学知识,分析摆动导杆机构的几何关系,并解决实际问题。
技能目标:1. 学生能够运用CAD软件绘制摆动导杆机构的三维模型,并进行简单的运动仿真。
2. 学生能够通过实验或模拟,观察和分析摆动导杆机构的运动状态,提出并解决问题。
3. 学生能够运用所学知识,设计简单的摆动导杆机构,实现特定的运动要求。
情感态度价值观目标:1. 学生能够培养对机械运动的兴趣,增强对机械设计、制造等相关专业的认识和认同。
2. 学生通过小组合作完成课程任务,培养团队协作精神和沟通能力。
3. 学生能够认识到摆动导杆机构在生活中的应用,提高对科学技术的认识和尊重,激发创新意识。
课程性质:本课程为机械设计基础课程,旨在帮助学生建立摆动导杆机构的基本理论,培养其运用CAD软件进行设计和分析的能力。
学生特点:学生为高中二年级学生,具备一定的物理、数学基础,对机械运动有一定了解,但对摆动导杆机构的认识有限。
教学要求:结合学生特点,注重理论与实践相结合,充分运用现代教学手段,激发学生的学习兴趣,提高其动手能力和解决问题的能力。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容本课程教学内容主要包括以下几部分:1. 摆动导杆机构的基本概念:介绍摆动导杆机构的定义、分类及其在工程中的应用。
- 教材章节:第二章第一、二节- 内容:摆动导杆机构的类型、特点及应用实例。
2. 摆动导杆机构的工作原理:讲解摆动导杆机构的运动原理、运动关系及运动特性。
- 教材章节:第二章第三节- 内容:摆动导杆机构的运动分析、几何关系、速度和加速度的计算。
3. 摆动导杆机构的设计与CAD软件应用:学习如何使用CAD软件进行摆动导杆机构的设计与运动分析。

摆动导杆机构转速计算
摆动导杆机构是一种常见的机械机构,广泛应用于各种机械运动中。
它的转速是指机构在单位时间内转动的圈数或次数,是机构运动的重要参数之一。
下面将介绍如何计算摆动导杆机构的转速。
首先,我们需要了解摆动导杆机构的运动规律。
摆动导杆机构通常由一个固定导杆、一个活动导杆和一个原动机组成。
当原动机转动时,通过连杆将动力传递给活动导杆,使其在一定范围内摆动。
计算摆动导杆机构的转速,需要先了解其运动周期和运动角速度。
一个运动周期是指机构完成一次完整运动所需要的时间,而运动角速度则是机构在单位时间内转动的角度。
假设摆动导杆机构的运动周期为T,运动角速度为ω,那么机构的转速n可以通过以下公式计算:
n = ω / (2π)
其中,π为圆周率,约等于3.14159。
如果要计算摆动导杆机构的实际转速,还需要考虑机构的减速比和齿轮的传动比等因素。
减速比是指减速器中各级齿轮的传动比之和,而齿轮的传动比则是指主动齿轮与从动齿轮的齿数比。
通过上述公式,我们可以计算出摆动导杆机构的转速。
然而,在实际应用中,还需要考虑机构的负载、运动精度、噪音等因素,以及
机构的尺寸、材料、寿命等设计因素,进行综合分析和优化设计。
总之,计算摆动导杆机构的转速是机构设计和运动控制的重要一环。
通过准确的计算和应用合理的设计因素,可以提高机构的工作效率、稳定性和使用寿命,从而提高机械设备的整体性能。
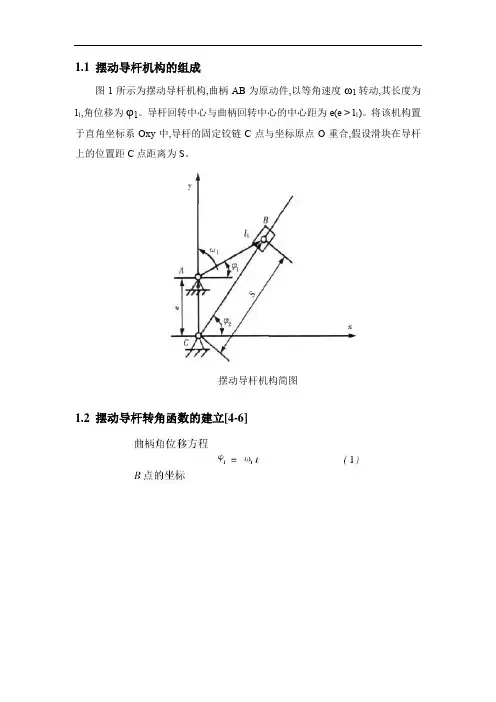
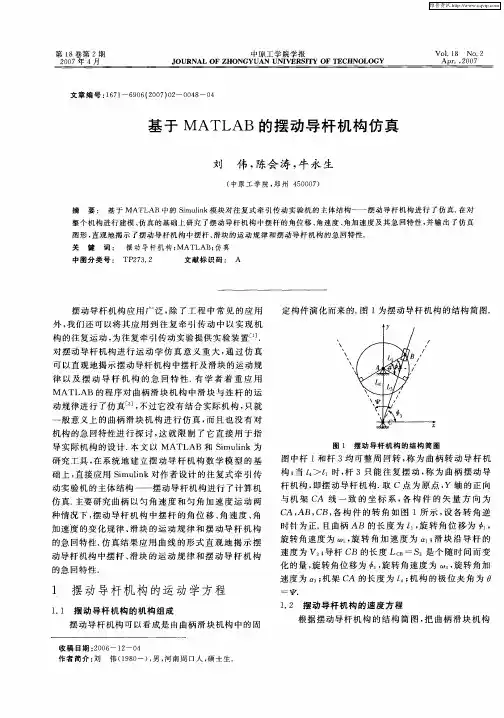
1.1 摆动导杆机构的组成
图1所示为摆动导杆机构,曲柄AB为原动件,以等角速度ω1转动,其长度为l1,角位移为φ1。
导杆回转中心与曲柄回转中心的中心距为e(e > l1)。
将该机构置于直角坐标系Oxy中,导杆的固定铰链C点与坐标原点O重合,假设滑块在导杆上的位置距C点距离为S。
摆动导杆机构简图
1.2 摆动导杆转角函数的建立[4-6]
(7)
式(7)为摆动导杆BC一个周期内转角函数ω2的表达式。
1.3 摆动导杆角速度函数的建立
式(11)为摆动导杆BC一个周期内角速度函数ω2的表达式。
1.4 摆动导杆角加速度函数的建立
式(13)为摆动导杆BC一个周期内角加速度函数ε2的表达式。
摆动导杆机构杆长条件一、摆动导杆机构的基本结构和原理摆动导杆机构由导杆、摆杆、连杆和固定杆组成。
导杆通过摆杆与连杆相连,连杆又与固定杆相连。
当导杆绕固定杆旋转时,摆杆和连杆就会发生相应的运动,实现输入旋转运动到输出直线运动的转换。
二、摆动导杆机构杆长的定义和影响摆动导杆机构杆长指的是导杆的长度,记为L。
杆长的选择对机构的运动特性和性能有着重要影响。
1. 运动范围:杆长的不同会导致机构的运动范围不同。
当杆长较短时,机构的运动范围较小;当杆长较长时,机构的运动范围较大。
因此,在实际应用中,需要根据需要选择合适的杆长,以满足机构的运动要求。
2. 运动平稳性:杆长的选择还会影响机构的运动平稳性。
当杆长较短时,机构的运动会比较剧烈,容易产生震动和冲击;当杆长较长时,机构的运动相对平稳。
因此,在设计机构时,需要考虑杆长对运动平稳性的影响,选择合适的杆长以保证机构的工作稳定性。
3. 动力传递效率:杆长的选择还会对机构的动力传递效率产生影响。
一般来说,杆长越短,动力传递效率越高;杆长越长,动力传递效率越低。
因此,在设计机构时,需要根据实际需求选择合适的杆长,以保证动力传递的效率。
4. 结构紧凑性:杆长的选择还会影响机构的结构紧凑性。
当杆长较短时,机构的结构相对紧凑;当杆长较长时,机构的结构相对松散。
因此,在设计机构时,需要根据实际需求选择合适的杆长,以保证机构的结构紧凑性。
三、摆动导杆机构杆长的确定方法确定摆动导杆机构的杆长需要考虑多个因素,包括机构的运动要求、工作环境和结构限制等。
1. 运动要求:根据机构的运动要求确定杆长的范围。
根据机构的运动范围和运动平稳性要求,确定最小和最大杆长。
2. 工作环境:考虑机构的工作环境,包括机构所处的空间限制和工作位置要求等。
根据实际情况,确定机构的杆长范围。
3. 结构限制:考虑机构的结构限制,包括导杆、摆杆和连杆的材料和制造工艺等。
根据结构限制,确定机构的杆长范围。
根据以上几个因素,可以确定摆动导杆机构的杆长范围。
《机械设计基础》第五版摆动导杆机构设计课件
摆动导杆机构是一种用来传递动力和运动的机构。
在机械设计中,摆动导杆机构是经常用来设计滑块机构和曲柄机构的重要组成部分。
摆动导杆机构通常由下面几个部分组成:
1.导杆:导杆是机构的最主要的构成部分,通常由一条杆件构成,其作用是引导滑块或连杆的运动。
2.摆杆:摆杆是导杆机构的另一个重要部分,通常被用来连接导杆和其他部分。
摆杆的长度和角度通常被用来影响机构的运动状态。
3.滑块:滑块是机构中一个常用的部分,通常被用来将动力从曲柄传递给导杆,进而让导杆带动滑块和其他部分的运动。
4.曲柄:曲柄是机构的主要动力来源之一,通常被用来提供旋转动力,用来带动其他部分的运动。
设计摆动导杆机构需要考虑以下几个方面:
1.机构的应用场景和需要:设计摆动导杆机构需要首先考虑机构应用的场景和需要,例如机构所需要承受的载荷大小、运动速度要求等。
2.机构的运动状态和限制:设计摆动导杆机构需要考虑机构的运动状态和限制,例如机构是否需要进行平移或者旋转等,以及机构是否有特殊的运动限制或者要求。
3.材料和制造工艺:设计摆动导杆机构需要选择适合的材料和制造工艺,以保证机构的可靠性和耐用性。
4.机构的结构和尺寸:设计摆动导杆机构需要考虑机构的结构和尺寸,以保证机构的可操作性和可维护性。
总的来说,摆动导杆机构的设计需要综合考虑机械设计基础知识、应用场景和运动要求等方面,以达到机构可靠、高效、稳定的运行状态。
偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角鉳in能出现在曲柄与滑块的导路相平行的位置。
的答案是“错”。
摆动导杆机构不存在急回特性。
的答案是“错”。
在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。
的答案是“错”。
在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置。
的答案是“对”。
在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。
的答案是“对”。
图示铰链四杆机构ABCD中,可变长度的a杆在某种合适的长度下,它能获得曲柄摇杆机构。
的答案是“错”。
曲柄摇杆机构只能将回转运动转换为往复摆动。
的答案是“错”。
在单缸内燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。
的答案是“错”。
增大构件的惯性,是机构通过死点位置的唯一办法。
的答案是“错”。
平面四杆机构有无急回特性取决于极位夹角是否大于零。
的答案是“对”。
任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。
的答案是“错”。
凡曲柄摇杆机构,极位夹角璞夭坏扔?0,故它总具有急回特征。
的答案是“错”。
平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值鉳in不小于某一许用值[鉣。
的答案是“对”。
在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。
的答案是“错”。
任何平面四杆机构出现死点时,都是不利的,因此应设法避免。
的答案是“错”。
平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。
的答案是“错”。
转动导杆机构中不论取曲柄或导杆为原动件,机构均无死点位置。
的答案是“对”。
铰链四杆机构是由平面低副组成的四杆机构。
的答案是“对”。
在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角鉳in可能出现在曲柄与机架两个共线位置之一处。
的答案是“对”。
当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。
摆动导杆机构的极位夹角摆动导杆机构的极位夹角,这个名字听起来是不是有点儿高大上?别担心,今天咱们就像聊家常一样,把这个概念好好给大家捋一捋。
摆动导杆机构,听起来就像个古老的玩意儿,其实它在机械工程里可是个宝贝啊。
就像小时候玩的秋千一样,荡起来的感觉既刺激又快乐。
这个机构的工作原理就像我们生活中的很多事情,摆动、转动、甚至是互相影响。
想象一下,你在秋千上摆动,前后晃动,那种感觉多自由啊。
极位夹角就是那个摆动的范围,决定了你能晃多远。
太小了,你可能连风都感受不到,太大了,又可能摔得跟个闷葫芦似的,没法控制。
这就像你和朋友一起去蹦极,过于兴奋可能会失控,太谨慎又没意思。
极位夹角就是在这个平衡点上,让你既能体验刺激又不会摔得粉身碎骨,真是个聪明的设计。
在生活中,很多时候我们也要考虑角度的问题。
比如说,跟朋友聊天,有时候说话的角度不对,气氛就会冷下来。
这个极位夹角的设计思想其实也能给我们启发。
你得找到那个合适的点,才能让事情顺利进行。
就像是舞蹈,舞者之间得有默契,才能翩翩起舞,像飞一样。
极位夹角就是让我们在设计中找出那种默契。
再说说这个极位夹角的实际应用。
它可不只是机械设计师的专利,生活中到处都是它的影子。
比如说,在很多大型机器里,这种机构帮助设备实现精准的运动。
就像一个专业的厨师,调配调料,每一种材料都得放到恰到好处,才能做出一盘美味佳肴。
摆动导杆机构在这里就像那个厨师,确保每个动作都准确无误。
要不然,搞不好就会“翻车”,那可就笑话了。
极位夹角的大小又该怎么定呢?这可不是随便瞎凑的,得根据实际需求来。
就像我们穿衣服,冬天穿得厚,夏天轻松点。
设计师在决定这个角度时,得考虑使用环境、负载要求等因素,确保一切都能稳稳当当,不至于出岔子。
就像咱们逛街,得根据天气来决定穿什么,不能一味追求时尚而忽略了舒适度。
咱们再看看这个机构的好处。
它的稳定性让机器在运动中不易出现故障,降低了维护成本。
就像你养的小猫小狗,吃得好、玩的好,它们自然就健康。
铰链四杆机构:所有的运动副全部都是回转副,这种四杆机构叫铰链四杆机构。
形成条件结论:①最短杆与最长杆长度和小于或等于其余两杆长之和。
②整转副是由最短杆与其邻边组成的。
1、 取最短杆为机架时,机架上有两个整转副,故得双曲柄机构βψϕ2、 取最短杆的邻边为机架时,机架上只有一个整转副,故得曲柄摇杆机构γβγβψϕϕψγβγβψϕϕψ3、取最短杆的对边为机架时,机架上没有整转副,故得双摇杆机构齿轮的压力角渐开线上某点的法线(也就是压力方向线)与该点 速度方向线所夹的锐角αk 称为该点的压力角。
此概 念和平面连杆机构以及凸轮机构中确定的一样。
如果用r b 表示基圆半径∵ OB ⊥BK , OK ⊥V k ∴ αk=∠BOKI对中曲柄滑块机构偏置曲柄滑块机构摆动导杆机构与转动导杆机构当l2 > l1时,β和ϕ都可以在0~360︒范围内变化,也就是说,杆2、杆4都可以作整周转动。
此时,导杆机构又叫做转动导杆机构。
当l1 > l2时,ϕ只能在<360︒的范围内变化,就是说,杆4只能往复摆动。
此时,导杆机构又称为摆动导杆机构。
(需要注意的一点是:导杆机构有一个很大的优点:γ≡ 90︒,传动角恒等于90︒。
因为滑块3作用在导杆4的力P始终垂直于导杆,始终与导杆的运动方向一致。
这样,α≡ 0,γ≡ 90︒421ABB摆块机构如果我们固定曲柄滑块机构中的杆2这个构件,不管AB作整周转动还是摆动,块3都是绕C点作往复摆动。
因此,这种机构就叫做摆动滑块机构,简称摆块机构。
B定块机构要是固定滑块3,这种机构就叫做定块机构。
1234A BC双滑块机构椭圆机构偏心轮机构l 1Al 2B CDl 2l 1l牛头刨床齿轮传动结论:渐开线齿轮的正确啮合条件是两轮的模数和压力角必须分别相等。
这样,传动比还可写成:2112121221''z z d d d d d d i b b =====ωω中心距 a = r 1'+r 2'= r 1+r 2 = m (z 1+z 2) /2。
摆动导杆机构转速计算摆动导杆机构是一种常见的机械传动装置,在工程设计和实际应用中具有广泛的应用。
通过计算摆动导杆机构的转速,可以帮助工程师分析和优化该机构的运动特性,从而提高其性能和可靠性。
我们需要了解摆动导杆机构的基本结构和工作原理。
该机构由一个刚性导杆和一个摆动杆组成,导杆的一端固定,另一端通过铰链连接到摆动杆的一端。
当摆动杆绕固定铰链旋转时,导杆也会做相应的摆动运动。
为了计算摆动导杆机构的转速,我们需要考虑以下几个因素:1.摆动杆的长度:摆动杆的长度对转速有重要影响。
较长的摆动杆会产生较大的转速,而较短的摆动杆则会产生较小的转速。
2.导杆的长度:导杆的长度也会对转速产生影响。
较长的导杆会导致较小的转速,而较短的导杆则会导致较大的转速。
3.铰链位置:铰链位置的选择也会对转速产生影响。
通常情况下,将铰链放置在导杆的一端,可以产生较大的转速;而将铰链放置在导杆的另一端,则会产生较小的转速。
4.驱动力:驱动力的大小也会对转速产生影响。
较大的驱动力会产生较大的转速,而较小的驱动力则会产生较小的转速。
为了计算摆动导杆机构的转速,可以使用以下公式:转速= (2 * π * 驱动力) / (摆动杆长度 * 导杆长度)其中,转速以弧度/秒为单位,驱动力以牛顿为单位,摆动杆长度和导杆长度以米为单位。
通过以上公式,我们可以根据摆动导杆机构的具体参数进行计算,得到其转速的数值。
这样的转速计算可以帮助工程师评估机构的性能,并根据需要进行优化设计。
需要注意的是,以上公式仅适用于简单的摆动导杆机构。
在实际应用中,可能会涉及到更复杂的摆动导杆机构,例如具有多个链接杆和铰链的机构。
对于这种情况,需要进行更复杂的力学分析和计算,以确定其转速。
通过计算摆动导杆机构的转速,可以帮助工程师分析和优化机构的运动特性。
合理选择摆动杆的长度、导杆的长度和铰链位置,以及提供适当大小的驱动力,可以实现所需的转速。
这样的转速计算对于设计和改进摆动导杆机构具有重要的指导意义。