《机械设计基础》第五版摆动导杆机构设计 2
- 格式:ppt
- 大小:122.00 KB
- 文档页数:1
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。


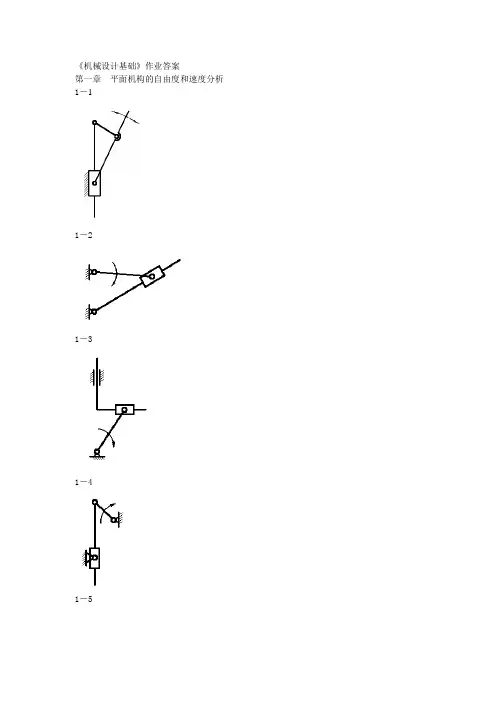
1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。

1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
![机械设计基础-(第五版)讲义2[35P][0.99MB]](https://uimg.taocdn.com/51eb4883680203d8ce2f2413.webp)
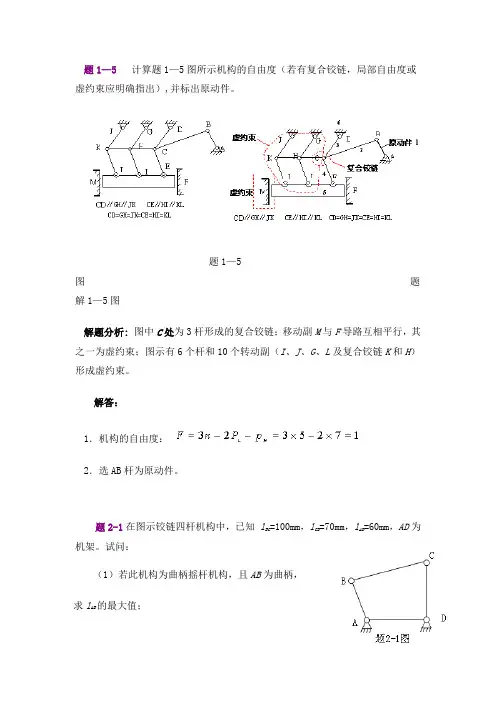
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图题解1—5图解题分析: 图中C处为3杆形成的复合铰链;移动副M与F导路互相平行,其之一为虚约束;图示有6个杆和10个转动副(I、J、G、L及复合铰链K和H)形成虚约束。
解答:1.机构的自由度:2.选AB杆为原动件。
题2-1在图示铰链四杆机构中,已知l BC=100mm,l CD=70mm,l AD=60mm,AD为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB为曲柄,求l AB的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
解题分析:根据铰链四杆机构曲柄存在条件进行计算分析。
在铰链四杆机构中,若满足杆长条件,以最短杆或最短杆相邻的杆为机架,机构则有曲柄,否则无曲柄;若不满足杆长条件,无论取哪个构件为机架,机构均为无曲柄,即为双摇杆机构。
解答:1.因为AD 为机架,AB 为曲柄,故AB 为最短杆,有AD CD BC AB l l l l +≤+,则m m30)1006070(=-+=-+≤BC AD CD AB l l l l故 mm30max =AB l2.因为AD 为机架,AB 及CD 均为曲柄,故AD 杆必为最短杆,有下列两种情况:若BC 为最长杆,则 m m100=<BC AB l l ,且AB CD BC AD l l l l +≤+,则m m90m m )7010060(=-+=-+≥CD BC AD AB l l l l得 m m 100m m 90≤≤AB l若AB 为最长杆,则m m100=>BC AB l l ,且BC CD AB AD l l l l +≤+,故m m110m m )6070100(=-+=-+≤AD CD BC AB l l l l得m m 110m m 100≤≤AB l故m m 90min =AB l3.如果机构尺寸不满足杆长条件,则机构必为双摇杆机构。
机械设计基础课后习题答案(第五版)(完整版)机械设计基础(第五版)课后习题答案(完整版)高等教育出版社杨可竺、程光蕴、李仲生主编9-1答退火:将钢加热到一定温度,并保温到一定时间后,随炉缓慢冷却的热处理方法。
主要用来消除内应力、降低硬度,便于切削。
正火:将钢加热到一定温度,保温一定时间后,空冷或风冷的热处理方法。
可消除内应力,降低硬度,便于切削加工;对一般零件,也可作为最终热处理,提高材料的机械性能。
淬火:将钢加热到一定温度,保温一定时间后,浸入到淬火介质中快速冷却的热处理方法。
可提高材料的硬度和耐磨性,但存在很大的内应力,脆性也相应增加。
淬火后一般需回火。
淬火还可提高其抗腐蚀性。
调质:淬火后加高温回火的热处理方法。
可获得强度、硬度、塑性、韧性等均较好的综合力学性能,广泛应用于较为重要的零件设计中。
表面淬火:迅速将零件表面加热到淬火温度后立即喷水冷却,使工件表层淬火的热处理方法。
主要用于中碳钢或中碳合金钢,以提高表层硬度和耐磨性,同时疲劳强度和冲击韧性都有所提高。
渗碳淬火:将工件放入渗碳介质中加热,并保温一定时间,使介质中的碳渗入到钢件中的热处理方法。
适合于低碳钢或低碳合金钢,可提高表层硬度和耐磨性,而仍保留芯部的韧性和高塑性。
9-2解见下表9-3解查教材表9-1,Q235的屈服极限查手册GB706-88标准,14号热轧工字钢的截面面积则拉断时所所的最小拉力为9-4解查教材表9-1,45钢的屈服极限许用应力把夹紧力向截面中心转化,则有拉力和弯距截面面积抗弯截面模量则最大夹紧力应力分布图如图所示图9.3 题9-4解图9-5解查手册,查手册退刀槽宽度,沟槽直径,过渡圆角半径,尾部倒角设所用螺栓为标准六角头螺栓,对于的螺栓,最小中心距,螺栓轴线与箱壁的最小距离。
9-6解查手册,当圆轴时,平键的断面尺寸为且轴上键槽尺寸、轮毂键槽尺寸。
图9.5 题9-6解图9-7解(1)取横梁作为示力体,当位于支承右侧处时由得由得由得由得(2)横梁弯矩图图9.7 题9-7解图(3)横梁上铆钉组的载荷力矩水平分力垂直分力9-8解水平分力在每个铆钉上产生的载荷垂直分力在每个铆钉上产生的载荷力矩在每个铆钉上产生的载荷各力在铆钉上的方向见图所示图9.9 题9-8解图根据力的合成可知,铆钉1的载荷最大9-9解铆钉所受最大载荷校核剪切强度校核挤压强度均合适。

第2章平面连杆机构2.1复习笔记平面连杆机构是由若干构件用低副连接组成的平面机构。
优点:构件的运动形式多样,可以实现给定运动规律或运动轨迹;低副以圆柱面或平面相接触,承载能力高,耐磨损,制造简单,易获得较高的制造精度。
缺点:不易精确实现复杂的运动规律,且设计较为复杂;当构件数和运动副数较多时,效率较低。
一、平面四杆机构的基本类型及其应用按照所含移动副数目的不同,可分为3类:全转动副的铰链四杆机构、含一个移动副的四杆机构以及含两个移动副的四杆机构。
1.铰链四杆机构图2-1全部用转动副相连的平面四杆机构称为平面铰链四杆机构,简称为铰链四杆机构,如图2-1所示。
其中,机构的固定构件4称为机架,与机架用回转副相连接的杆1和杆3称为连架杆,不与机架直接连接的杆2称为连杆,能作整周转动的连架杆1称为曲柄,仅能在某一角度摆动的连架杆3称为摇杆。
按照连架杆是曲柄还是摇杆,铰链四杆机构分为三种基本形式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
2.含一个移动副的四杆机构此类型的四杆机构主要有四种形式:曲柄滑块机构、导杆机构、摇块机构和定块机构,分别如图2-2所示。
曲柄滑块机构导杆机构摇块机构定块机构图2-23.含两个移动副的四杆机构含有两个移动副的四杆机构称为双滑块机构。
按照两个移动副所处位置的不同,又可分为四种形式:(1)正切机构:两个移动副不相邻;(2)正弦机构:两个移动副相邻且其中一个移动副与机架相关联;(3)两个移动副相邻且均不与机架相关联;(4)两个移动副都与机架相关联。
正切机构正弦机构两移动副相邻且均不与机架相关联的机构两个移动副都与机架相关联的机构图2-34.具有偏心轮的四杆机构该种机构如图2-4(a)、(b)所示,相对应的机构简图分别如图2-4(c)、(d)所示。
(a)(b)(c)(d)图2-4偏心轮广泛应用于传力较大的剪床、冲床、颚式破碎机、内燃机等机械中。
5.四杆机构的扩展实际生产应用中的某些多杆机构是由若干个四杆机构组合扩展形成的,如图2-5和图2-6所示。
机械设计基础(第五版)课后习题答案) 杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图 1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
机械设计基础(第五版)课后习题答案(完整版) 杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图 1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:向垂直向上。
,方1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由分度圆直径4-3解由可得模数得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定故当齿数于齿根圆。
则解得,基圆小时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径正好在刀具 4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段。
即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。