导杆机构应用(精)
- 格式:ppt
- 大小:548.50 KB
- 文档页数:8
旋转导杆机构应用研究报告旋转导杆机构应用研究报告摘要:本篇文章主要研究并探讨了旋转导杆机构在各个领域的应用情况和优势。
通过对旋转导杆机构的结构、工作原理和特点进行分析,我们发现它在机械传动和运动控制中具有诸多优点,例如高精度、高刚度、紧凑的结构设计、良好的性能稳定性等。
本文逐一介绍了该机构在机械制造、航天航空、医疗器械和机器人领域的应用实例,并总结了其在这些领域中的推广前景和未来发展方向。
1. 引言旋转导杆机构是一种常用于机械传动和运动控制领域的重要机构,其应用广泛且具有重要的研究价值。
本文将从结构设计、工作原理和特点等方面对旋转导杆机构进行深入研究,并探讨其在不同领域中的应用情况和前景。
2. 旋转导杆机构的结构与工作原理旋转导杆机构是由一对旋转副组成,其中一个副上的导轨与导杆相匹配,另一个副上的套筒与导杆的外表面相配合。
导杆的一端与机构的固定部分连接,另一端与机构的可动部分连接,实现对可动部分的定位。
该机构的工作原理是通过旋转导杆的相对运动,在导轨和导杆之间产生滚动摩擦力和刚性连接,从而实现对可动部分的精确定位。
该机构通过优化设计可以实现高精度、高刚度和低摩擦等要求。
3. 旋转导杆机构在机械制造领域的应用旋转导杆机构在机械制造领域中具有广泛的应用,主要体现在以下几个方面:3.1 工件定位与夹持:在加工过程中,工件的定位与夹持是至关重要的一环。
旋转导杆机构通过其高精度和高刚度的特点,能够实现对工件的精确定位和稳定夹持,提高加工质量和效率。
3.2 机器自动化:旋转导杆机构可以用于机器的自动化控制系统,实现机器的精确定位和控制。
这在需要精确加工和运动控制的自动化生产线中具有重要应用。
3.3 机器人末端执行器:在工业机器人中,末端执行器需要具备精确的定位和运动能力。
旋转导杆机构可以提供高刚度和高精度的定位能力,从而使机器人的末端执行器具备更好的运动控制能力。
4. 旋转导杆机构在航天航空领域的应用航天航空领域对机械传动和运动控制的要求更高,旋转导杆机构能够满足这些要求,并具有以下特点:4.1 高精度:航天航空领域对机械系统的精度要求非常高,旋转导杆机构通过精确的定位和运动控制,能够保证航天器和飞行器的精确控制和操作。

铰链四杆机构的演化及应用教学设计铰链四杆机构的演化及应用教学设计作为一名教学工作者,通常会被要求编写教学设计,教学设计是一个系统化规划教学系统的过程。
那么优秀的教学设计是什么样的呢?以下是小编精心整理的铰链四杆机构的演化及应用教学设计,希望对大家有所帮助。
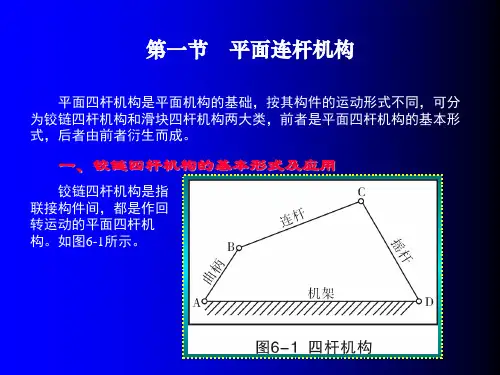
《平面连杆机构》是中等职业学校《机械基础》中的重要内容,《铰链四杆机构的演化及应用》是该章中的重点和难点。
铰链四杆机构是平面连杆机构中最为典型的机构,它可以演化为“曲柄滑块机构、导杆机构”,多年教学发现,学生的基础不同,虽然在学习“铰链四杆机构的演化过程及应用”知识时表现出的困难程度有差别,但由于缺乏直观经验,学生在学习过程中均会存在一定的难度!笔者针对现在所任教的单招学生教学对象,设计了一堂课堂教学并进行了实施,本文对教学中的成功与不足等方面进行教学反思,以在今后教学中有所借鉴,提高教学效果!教情、学情分析:任教学生为“单招班”学生,他们的文化基础与学习态度较不是太好。
本节课是一堂复习课,在第一轮新课教学中主要采取传统教学方法,因学生对“机构的应用”缺少感性认识,理解时表现出一定的难度。
本节课运用“多媒体”教学手段(更加直观)、采用“课堂自主—研究学习”的教学方法,力图使学生对本节内容的理解更加深入,掌握更加透彻!“教学目的”的制定:1、掌握铰链四杆机构的演化过程及演化机构的结构组成及运动原理(认知目标);2、培养学生的观察能力、概括能力和自学能力,使他们能在实习或生产中解决相关的技术问题(能力目标);3、激发学生学习兴趣,增进师生互动、交流、达到“教学相长”的效果,进行热爱专业的思想教育,培养学生理论联系实际地学习(情感目标)。
教学方法及手段的选择:本节课采取课堂自主——研究的教学方法,课前让学生先进行自学,课堂上教师对总的教学目标进行细化,在讲解每个知识点时,采用“引导教学法”代替传统的“填鸭式”,先示出引导问题,让每个学生通过思考解决问题,层层递进,逐个解决问题,然后教师对学生的思维进行总结、训练和拓展;为弥补学生想像能力的欠缺、增强学生学习的直观性,对铰链四杆机构的演化过程可采用flash软件制作课件,对演化机构的应用(结构组成和运动原理)可从Internet上搜索多种教学素材(录像、实物等),提高教学效果!教学过程如下:一、思维引入:1.铰链四杆机构三种基本类型及判断方式?2.急回特性判定及其应用意义?3.曲柄摇杆机构死点产生条件、位置、克服方法、应用?4.列举实际生产生活中三种典型铰链四杆机构的应用实例?还存在哪些其他形式的四杆机构?二、思维启发演绎:(一)曲柄滑块机构演化通过演示,让学生观察,分析曲柄滑块机构是曲柄摇杆机构的演化形式。
目录1 引言1.1 选题的依据及意义·························································································(1)1.2 国内外研究概况及发展趋势··········································································(2)1.3 论文主要工作·······························································································(3)2 曲柄(导杆)滑块机构简介····································································(4)3 曲柄(导杆)滑块机构的运动学分析3.1 曲柄导杆滑块机构的运动分析······································································(5)3.1.1 机构装配的条件····················································································(6)3.1.2 建立数学模型·························································································(6)3.1.3 计算机辅助分析及其程序设计······························································(9)3. 2曲柄滑块机构的运动分析3.2.1 机构装配的条件·····················································································(25)3.2.2 建立数学模型·······················································································(25)3.2.3 计算机辅助分析及其程序设计·····························································(27)4 曲柄(导杆)滑块机构实验台装置设计4. 1 实验台结构·································································································(40)4.2 实验台硬件操作说明···················································································(41)4.3 用SolidWorks 2006实现实验台的立体图形················································(42)总结·········································································································(46)参考文献·········································································································(47)致谢·········································································································(48)1 引言1.1 选题的依据及意义1.曲柄(导杆)滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。

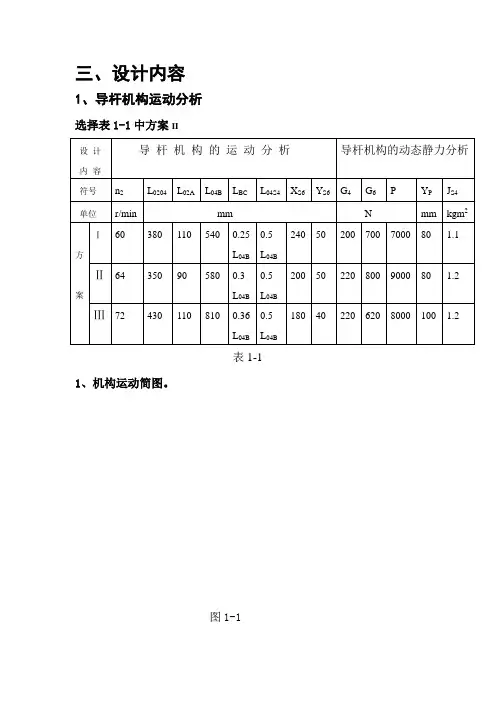
三、设计内容1、导杆机构运动分析选择表1-1中方案II设计内容导杆机构的运动分析导杆机构的动态静力分析符号n2 L0204 L02A L04B L BC L04S4 X S6 Y S6 G4 G6 P Y P J S4 单位r/min mm N mm kgm2方案Ⅰ60 380 110 540 0.25L04B0.5L04B240 50 200 700 7000 80 1.1 Ⅱ64 350 90 580 0.3L04B0.5L04B200 50 220 800 9000 80 1.2 Ⅲ72 430 110 810 0.36L04B0.5L04B180 40 220 620 8000 100 1.2表1-11、机构运动简图。
图1-12、曲柄位置“7”速度分析,加速度分析(列矢量方程,画速度图,加速度图)取曲柄位置“7”进行速度分析,其分析过程同曲柄位置“1”。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4=υA3+υA4A3大小? √?方向⊥O4A⊥O2A∥O4B代表pa4 pa3 a3a4V A3=ω2l o2A=64/60×6.28×0.09=0.603m/s取速度极点P,速度比例尺µv=0.01(m/s)/mm,作速度多边形如图1-2则由图1-2知,υA4=pa4·μv=29×0.01=0.29m/sυA4A3=a3a4·μv=52×0.01m/s=0.52m/s图1-2υB5=υB4=υA4·O4B/ O4A=0.44m/s取5构件为研究对象,列速度矢量方程,得υC5=υB5+υC5B5大小? √?方向∥XX⊥O4B⊥BC代表pc5 pb4 b4b5其速度多边形如图1-2所示,有υC5=5Pc·μv=42×0.01=0.42m/s取曲柄位置“7”进行加速度分析,取曲柄构件3和4的重合点A进行加速度分析.列加速度矢量方程,得:a A4 =a A4n +a A4t= a A3n +a A4A3k+a A4A3r 大小? ω42l O4A ?√2ω4υA4A3 ? 方向? A→O4⊥O4B A→O2⊥O4B(向右)∥O4B代表pA4’pn4’n4’A4’p’A3’A3’k’k’A4’取加速度极点为P',加速度比例尺μa=0.02(m/s2)/mm作加速度多边形图1-3图1-3则由图1─3知:a A4t= n4’A4’·μa =137×0.02m/s2=2.74m/s2α4= a A4t/l O4A = 7.17 m/s2a A4 = pA4’·μa = 138×0.01m/s2 =2.76 m/s2用加速度影象法求得a B5 = a B4 = a A4 ×l O4B/l O4A=4.19m/s2取5构件的研究对象,列加速度矢量方程,得a C5=a B5+ a C5B5n+ a C5B5t大小?√√?方向∥xx √ C→B ⊥BC代表 P’c5’ P’B5’ n5’B5’ C5’n5’加速度比例尺μa=0.02(m/s2)/mm其加速度多边形如图1─4所示,有图1-4a C5B5t= n5’c5’·μa =31×0.02m/s2 =0.62m/s2a C5 = P’c5’·μa =179×0.02m/s2 =3.58m/s23、曲柄位置“10”速度分析,加速度分析(列矢量方程,画速度图,加速度图)取曲柄位置“10”进行速度分析。
机构死点位置的分析与应用作者:钱雄伟来源:《职业·中旬》2011年第08期一、死点位置的物理现象如图1所示,当平面连杆机构以曲柄AB为主动件时,机构各构件的运动情况非常顺畅,而当机构以摇杆CD为主动件,在运行至连杆BC与从动件AB处于共线位置时,机构有可能出现卡死停顿现象,并下一瞬时的运动方向不确定,这即为机构的死点位置。
对于以传动为主要目的机构而言,死点位置显然是有害的,必须有克服死点危害的办法。
而有些机械却可以利用死点,满足工作中的某些特殊要求,这时死点位置变得有利了。
故正确认识死点位置,在机构中科学设计,合理利用有重要现实意义。
二、死点位置的本质以图1的曲柄摇杆机构为例,分析机构处于死点位置的力学状态。
从动件曲柄AB的运动来自连杆BC的传递,在死点位置时,AB与BC处于共线,此时二力杆BC沿着AB杆传力,通常情况下,经BC杆传递到从动件上的力F,可分解为从动件上受力点运动曲线的切线与法线两个方向的力,分别称为有效力Ft和有害力Fr,它们与传递力F和压力角α (受力点的受力方向和运动线速度方向的夹角,图中未给出)的关系为:F t=Fcosα,Fr=Fsinα。
在死点位置,压力角等于90°,有效力等于零,即连杆CD无法推动从动件AB实现绕A 点的转动,机构可能出现卡死,而且在此位置重新运动,AB杆的运动方向将不确定,下一瞬时有可能作顺时针转,也可能作逆时针转。
可见,机构死点位置的实质是从动件上的压力角等于90°,推动从动件运动的有效力为零(如为转动构件,则该位置的传力构件对从动件的有效转矩为零)——此为动力特性。
机构在此位置的卡死或运动方向的不确定为其运动特性。
三、机构死点位置的判断图1的曲柄摇杆机构当以曲柄AB作为主动件,摇杆CD作为从动件时,机构无论在哪个位置并未出现前述的死点现象,而当以摇杆CD作为主动件,曲柄AB作为从动件时,在曲柄AB与连杆BC共线的两个位置(图中虚线位置),机构出现了死点现象。
PPT1 本次课讲授导杆机构应用
PPT2 本次课的教学目标是,了解导杆机构应用的实例
PPT31.摆动导杆机构请注意看动画运动情况
1)结构组成:是由机架曲柄摇杆(导杆)滑套(滑块)组成
2)工作原理:曲柄作定轴匀速转动,带动滑套(滑块)转动并摆动,滑套(滑块)套在导杆上,使导杆往复来回摆动。
PPT42.摆动导杆机构应用实例
1)摆动导杆机构在插床上的应用请注意看动画运动情况,工作原理为
AB构件绕销轴A作定轴转动,带动滑块B转动并摆动,滑块B在导杆CD上滑动,并带动导杆CD绕销轴C做定轴摆动,摆杆CD带动连杆DE做平面运动,连杆DE带动滑块E和刀架及插刀做往复运动,实现插削加工。
PPT4 2)摆动导杆机构在牛头刨床上的应用请注意看动画运动情况
构件2绕铰链B作定轴转动,带动滑块3一起转动,滑块3绕铰链C摆动,并沿导杆DA滑动,带动导杆DA绕固定铰链A摆动,连杆DE做平面运动,滑块E沿FE导杆上下滑动,并带动刨床的滑枕做水平往复移动,从而实现刨刀的切削加工。
PPT5下面对本次课内容进行小结:本次课,
1.摆动导杆机构1)结构组成2)工作原理
2.摆动导杆机构应用实例
1)摆动导杆机构在插床上的应用
2)摆动导杆机构在牛头刨床上的应用
PPT6本次课作业:选择题图示牛头刨床机构的导杆为。
A.构件ADB.构件BCC.构件DE。

PPT1 本次课讲授转动导杆机构应用
PPT2 本次课的教学目标是,了解转动导杆机构应用实例
PPT3 1.转动导杆机构在缝纫机针刺机上的应用请注意看动画, 工作原理为
构件1作定轴转动,带动滑块2随同构件1作定轴转动,滑块2既随构件1转动,又沿构件3的滑道往复移动,同时带动导杆3做上下移动,把线缝在衣料上。
这是缝纫机针刺机构的示意图。
PPT4 2.转动导杆机构在小型刨床上的应用请注意看动画,工作原理为:构件2作定轴转动,带动滑块3做转动与摆动,滑块3带动导杆4绕着固定铰链A作定轴转动,同时滑块3沿导杆4作相对移动,转动导杆4带动连杆5,做平面运动,连杆5带动刨刀架与刨刀沿导轨进行往复移动,从而实现对工件的刨削加工。
PPT5 3.转动导杆机构在插床上的应用, 请注意看动画, 工作原理为
AB构件绕机架销轴B作定轴转动,带动导杆齿条移动并摆动,齿条带动小齿轮做定轴摆动, 小齿轮做定轴摆动的同时大齿轮也做定轴摆动,这是因为大齿轮与小齿轮共用一根轴的缘故,大齿轮带动齿条上安装的插刀进行上下往复移动,从而实现插键槽的加工。
PPT7 下面对本次课内容进行小结:
1.转动导杆机构在缝纫机针刺机上的应用
2.转动导杆机构在小型刨床上的应用
3.转动导杆机构在插床上的应用
PPT8 本次课作业:选择题
图示采用转动导杆机构的刨床,导杆为。
A.构件2B.构件4 C.构件5。
机械设计模拟考试题(附答案)一、单选题(共60题,每题1分,共60分)1、机构具有相对运动的条件是()A、机构的自由度数目小于主动件数目B、机构的自由度数目等于主动件数目C、机构的自由度数目大于等于主动件数目D、机构的自由度数目大于主动件数目正确答案:B2、按自由度数目不同,周转轮系可分为()A、周转轮系和定轮轮系B、简单行星轮系和差动轮系C、简单行星轮系和定轴轮系D、定轴轮系和差动轮系正确答案:B3、在蜗杆传动中,应用比较广泛的是()A、渐开线蜗杆B、圆柱蜗杆C、环面蜗杆D、锥蜗杆正确答案:B4、下列联轴器中,能补偿两轴的相对位移并且可缓冲、吸震得是( )A、万向联轴器B、凸缘联轴器C、齿式联轴器D、弹性柱销联轴器正确答案:D5、平面齿轮传动的是()。
A、螺旋齿轮传动B、锥齿轮传动C、蜗杆蜗轮传动D、斜齿轮传动正确答案:D6、下列四种轴承何种轴承必须成对使用。
A、推力球轴承B、圆柱滚子轴承C、圆锥滚子轴承D、深沟球轴承正确答案:D7、凸轮机构的从动件运动规律与凸轮的()有关。
A、表面硬度B、机架C、轮廓线D、基圆正确答案:D8、带和带轮间的摩擦系数与初拉力一定时,(),则带传动不打滑时的最大有效圆周力也愈大。
A、带速愈低B、大带轮上的包角愈大C、带轮愈宽D、小带轮上的包角愈大正确答案:D9、组成轮系的齿轮可以是()①圆柱齿轮;②圆锥齿轮;③蜗杆齿轮;④平面齿轮;A、①③④B、①②③C、①②③D、①②④正确答案:B10、无论滚子半径的大小如何,( )不会变A、实际轮廓B、尺寸C、度数D、以上都是正确答案:A11、导向键和()都用于动连接,即轴与轮毂间有相对轴向移动的连接。
A、平键B、矩形花键C、滑键D、轴键正确答案:C12、在下列平面四杆机构中,()无论以哪一构件为主动件,都不存在死点位置。
A、双曲柄机构和双摇杆机构B、曲柄摇杆机构C、双曲柄机构D、双摇杆机构正确答案:C13、轴的结构设计主要有()内容①各轴径向尺寸的确定;②各轴段向尺寸的确定;③其他尺寸的确定;A、①②③B、②③C、①③D、①②正确答案:A14、在运用( )解决周转轮系传动比的计算问题.A、反转法B、乘法C、正转法D、除法正确答案:A15、润滑油最重要的物理性能指标是()A、散热B、防锈C、吸振D、黏度正确答案:D16、带传动的中心距过大时,会导致( )A、带的弹性滑动加剧B、带在工作时会产生颤动C、带的寿命短D、小带轮包角减小而易产生打滑正确答案:B17、当量运载荷P=XFr+YFa,其中X代表()A、轴向载荷系数B、轴承承受的轴向载荷C、轴承承受的径向载荷D、径向载荷系数正确答案:D18、()的调质处理后屈服强度极限为800MPaA、35SiMnB、40CrC、QT600-3D、40MnB正确答案:D19、为了提高蜗杆的刚度,应()。
导杆机构分析范文导杆机构是一种常见的工程机械传动结构,广泛应用于起重机械、挖掘机、推土机等工程机械设备中。
本文将对导杆机构进行详细的分析与解释。
导杆机构是一种通过导杆来实现直线运动的机构,一般由导杆、导套、固定块等部件组成。
导杆负责传递运动力,导套则用来限定和滑动导杆的轨迹。
导杆机构可以实现高精度的直线运动,并且结构简单、制造成本低廉,因此在工程机械中得到广泛应用。
导杆机构的工作原理是通过传递力来实现直线运动。
当外力作用在导杆上时,导杆会受到力的作用而产生运动。
通过导套的限位作用,导杆只能在规定的轨迹上运动,从而实现直线运动。
导杆机构的特点是稳定性好、刚度高、定位精度高。
这是由于导杆在运动过程中受到的力是沿着导杆轴方向的,对导杆的外力和力矩不敏感,从而保证了较好的稳定性。
导杆机构的刚度是由导杆的材料和尺寸决定的,通常可以通过增大导杆的直径或者增大导套的长度来提高刚度。
定位精度则主要取决于导杆和导套的加工精度,一般可以达到几十个微米的精度要求。
导杆机构的应用范围非常广泛。
在起重机械中,导杆机构通常用于实现大臂伸缩、小车行走等动作。
在挖掘机中,导杆机构则常用于实现斗杆的伸缩和升降。
在推土机中,导杆机构常用于实现铲斗的升降和倾斜。
此外,导杆机构还可以应用于其他需要直线运动的工程机械设备中。
导杆机构的设计和制造需要注意以下几个因素。
首先是导杆和导套的材料选择,一般要选择具有较高强度和硬度的材料,以提高导杆机构的承载能力和耐磨性。
其次是导杆和导套的加工精度,对于要求较高精度的导杆机构,需要保证导杆和导套的加工精度。
最后是导杆和导套的润滑方式,可以使用润滑脂或者油脂等润滑剂来减少摩擦,提高导杆机构的工作效率和寿命。
总之,导杆机构是一种常见的工程机械传动结构,具有稳定性好、刚度高、定位精度高等优点。
通过合理的设计和制造,可以满足各种工程机械设备对直线运动的要求。
在未来的发展中,导杆机构还有可能在更多的工程机械设备中得到应用,提高工程机械的性能和效率。