工程力学 第2章 力系的等效与简化
- 格式:pdf
- 大小:4.39 MB
- 文档页数:16


《工程力学》Engineermechanics一、课程基本信息学时:40学分:2.5考核方式:考试,平时成绩占总成绩的百分比30%,考试占总成绩的百分比70%.中文简介:工程力学作为高等工科学校的一门课程,是其最基础的部分,它含盖了工程静力学和弹性静力学两门课程的主要内容。
工程静力学是工程构件静力设计的基础。
弹性静力学主要涉及力和变形之间的物性关系,以及弹性体的失效、与失效有关的设计准则。
同时,随着时代的发展,也增加了新的内容。
工程力学不仅与力学密切相关,而且紧密联系广泛的工程实际,在人民的实际生活也离不开工程力学的运用。
二、教学目的与要求刚体静力学部分第一章工程静力学的基本概念•物体受力分析目的与要求1 .学会受力分析2 .了解力系的等效与简化3 .力系的平衡条件与应用第二章力系的等效与简化目的与要求1 .会求力系的主矢和主矩2 .学会力系的等效与简化3 .力偶的性质与应用第三章力系的平衡目的与要求1 .求力系一般情况下的平衡方程2 .力系的平衡方程用于各种特殊情形3 .平面的力系平衡方程的应用第四章刚体静力学专题目的与要求1 .学会平面静定桁架的静力分析2 .会求有摩擦的问题,掌握库仑定律的应用弹性静力学部分第五章静力学基本原理方法应用于弹性体目的与要求1 .掌握弹性变形的内力变化2 .将刚体静力学的等效,简化以及平衡的概念和方法应用与弹性体3 .掌握弹性体的应力分析第六章弹性静力学的基本概念目的与要求1 .学习弹性静力学的基本概念,研究方法2 .了解弹性静力学对于工程设计的重要意义第七章简单的弹性静力学问题目的与要求1 .会求拉伸、压缩杆件的基本受力与变形情况2 .会求拉伸、压缩杆件的内力与应力3 .材料在拉伸、压缩时的强度设计第八章弹性杆横截面上的正应力分析目的与要求1 .了解材料受力与变形之间的关系2 .得出横截面上的内力分布规律的特征3 .计算横截面上的内力分布第九章弹性杆横截面上的切应力分析目的与要求1 .学习材料扭矩和剪力对应的切应力方法的不同点2 .得出横截面上的切应力分布规律的特征3 .计算横截面上的切应力分布第十章压杆的平衡稳定性与压杆设计目的与要求1 .学习弹性体平衡构件稳定性的基本概念2 .微弯的屈曲平衡构形下得出的平衡条件和小挠度微分方程3 .确定不同刚性支承条件下弹性压杆的临界力三、教学方法与手段本门课的教学方法与手段主要是运用课堂教学,课堂讨论的方法,通过举例,讲解习题,检查作业,发现问题,解决问题,回答学生的难点和疑点。

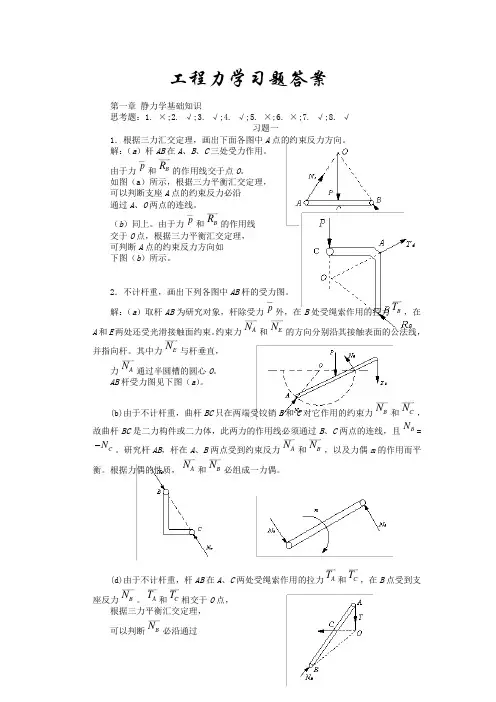
工程力学习题答案第一章 静力学基础知识思考题:1. ×;2. √;3. √;4. √;5. ×;6. ×;7. √;8. √习题一1.根据三力汇交定理,画出下面各图中A 点的约束反力方向。
解:(a )杆AB 在A 、B 、C 三处受力作用。
由于力和的作用线交于点O 。
如图(a )所示,根据三力平衡汇交定理, 可以判断支座A 点的约束反力必沿 通过A 、O 两点的连线。
(b )同上。
由于力和的作用线 交于O 点,根据三力平衡汇交定理, 可判断A 点的约束反力方向如 下图(b )所示。
2.不计杆重,画出下列各图中AB 杆的受力图。
解:(a )取杆AB 为研究对象,杆除受力外,在B 处受绳索作用的拉力,在A 和E 两处还受光滑接触面约束。
约束力和的方向分别沿其接触表面的公法线,并指向杆。
其中力与杆垂直,力通过半圆槽的圆心O 。
AB 杆受力图见下图(a )。
(b)由于不计杆重,曲杆BC 只在两端受铰销B 和C 对它作用的约束力和,故曲杆BC 是二力构件或二力体,此两力的作用线必须通过B 、C 两点的连线,且=。
研究杆AB ,杆在A 、B 两点受到约束反力和,以及力偶m 的作用而平衡。
根据力偶的性质,和必组成一力偶。
(d)由于不计杆重,杆AB 在A 、C 两处受绳索作用的拉力和,在B 点受到支座反力。
和相交于O 点,根据三力平衡汇交定理,可以判断必沿通过pB RpB Rp B T A N E N E N A N B N C N BN CN A N B N A N B N A T C T B N A T C TB NB、O两点的连线。
见图(d).第二章 力系的简化与平衡思考题:1. √;2. ×;3. ×;4. ×;5. √;6. ×;7. ×;8. ×;9. √.1. 平面力系由三个力和两个力偶组成,它们的大小和作用位置如图示,长度单位为cm ,求此力系向O 点简化的结果,并确定其合力位置。
工程力学(静力学与材料力学)习题详细解答(第2章)习题2-2图第2章 力系的简化2-1 由作用线处于同一平面内的两个力F 和2F 所组成平行力系如图所示。
二力作用线之间的距离为d 。
试问:这一力系向哪一点简化,所得结果只有合力,而没有合力偶;确定这一合力的大小和方向;说明这一合力矢量属于哪一类矢量。
解:由习题2-1解图,假设力系向C 点简化所得结果只有合力,而没有合力偶,于是,有∑=0)(F C M ,02)(=⋅++−x F x d F ,dx =∴,F F F F =−=∴2R ,方向如图示。
合力矢量属于滑动矢量。
2-2 已知一平面力系对A (3,0),B (0,4)和C (-4.5,2)三点的主矩分别为:M A 、M B 和M C 。
若已知:M A =20 kN·m 、M B =0和M C =-10kN·m ,求:这一力系最后简化所得合力的大小、方向和作用线。
解:由已知M B = 0知合力F R 过B 点;由M A = 20kN ·m ,M C = -10kN ·m 知F R 位于A 、C 间,且CD AG 2=(习题2-2解图)在图中设OF = d ,则θcot 4=dCD AG d 2)sin 3(==+θ (1) θθsin )25.4(sin d CE CD −== (2)即θθsin )25.4(2sin )3(dd −=+ d d −=+93 3=d习题2-1图习题2-1解图R∴ F 点的坐标为(-3, 0)合力方向如图所示,作用线过B 、F 点; 34tan =θ 8.4546sin 6=×==θAG 8.4R R ×=×=F AG F M A kN 6258.420R ==F 即 )kN 310,25(R=F 作用线方程:434+=x y 讨论:本题由于已知数值的特殊性,实际G 点与E 点重合。
2-3三个小拖船拖着一条大船,如图所示。
第三版工程力学(大连理工大学出版社)第一、二章知识点总结教材主编:邹建奇、李妍、周显波第一篇静力学第一章静力学基本知识1.力的三要素:大小、方向、作用点。
2.力的平衡:二力平衡、三角形法则与平行四边形法则。
3.约束与约束力:(1)光滑接触面约束:(2)柔体约束:(3)光滑铰链约束:①固定铰链;②可动铰链。
(4)链杆约束:(5)轴承约束:①向心轴承;②止推轴承。
4.画受力图步骤:(1)确定研究对象,将其从周围物体中分离出来,并画出其简图,称为画分离体图。
研究对象可以是一个,也可以由几个物体组成,但必须将它们的约束全部解除。
(2)画出全部的主动力和约束力。
主动力一般是已知的,故必须画出,不能遗漏,约束力一般是未知的,要从解除约束处分析,不能凭空捏造。
(3)不画内力,只画外力。
内力是研究对象内部各物体之间的相互作用力,对研究对象的整体运动效应没有影响,因此不画。
但外力必须画出,一个也不能少,外力是研究对象以外的物体对该物体的作用,它包括作用在研究对象上全部的主动力和约束力。
(4)要正确地分析物体间的作用力与反作用力,当作用力的方向一经假定,反作用力的方向必须与之相反。
当研究对象由几个物体组成时,物体间的相互作用力是内力,也不必画,若想分析物体间的相互作用力必须将其分离出来,单独画受力图,内力就变成了外力。
第二章力系的简化与平衡章节复习框架平面力系1.平面汇交力系(1)几何法--力多边形法则:依据了的平行四边形法则或三角形法则(如图示例所示)。
推广到由n个力组成的平面汇交力系,可得如下结论:平面汇交力系的合力是将力系中各力矢量依次首尾相连得折线,并将折线由起点向终点作有向线段,该有向线段(封闭边)表示该力系合力的大小和方向,且合力的作用线通过汇交点。
表达式为:iRFF∑=(2)解析法:①在力F所在的平面内建立直角坐标系Oxy,x与y轴的单位矢量为i、j,有力的投影定义可得。
⎪⎩⎪⎨⎧=⋅==⋅=),cos(),cos(jFFjFFiFFjFFyx力F的解析式为:jFiFFyx+=。
第2章 力系的等效与简化 作用在实际物体上的力系各式各样,但是,都可用归纳为两大类:一类是力系中的所有力的作用线都位于同一平面内,这类力系称为平面力系;另一类是力系中的所有力的作用线位于不同的平面内,称为空间力系。
这两类力系对物体所产生的运动效应是不同的。
同一类力系,虽然其中所包含的力不会相同,却可能对同一物体产生相同的作用效应。
在就是前一章中提到的力系等效的概念。
本章将在物理学的基础上,对力系的基本特征量加以扩展,引入力系主矢与主矩的概念;以此为基础,导出力系等效定理;进而应用力向一点平移定理以及力偶的概念对力系进行简化。
力系简化理论与方法将作为分析所有静力学和动力学问题的基础。
§2-1 力系等效定理 2-1-1 力系的主矢和主矩 2-1-2 力系等效定理 §2-2 力偶与力偶系 2-2-1 力偶与力偶系 2-2-2 力偶的性质 2-2-3 力偶系的合成 §2-3 力系的简化 2-3-1 力向一点平移定理 2-3-2 空间一般力系的简化 2-3-3 力系简化在固定端约束力分析中的应用 §2-4 结论和讨论 2-4-1 关于力矢、主矢、力矩矢、力偶矩矢以及 主矩矢的矢量性质 2-4-2 关于合力之矩定理及其应用 2-4-3 关于力系简化的最后结果 2-4-4 关于实际约束的简化模型 2-4-5 关于力偶性质推论的应用限制 习 题 本章正文 返回总目录第2章 力系的等效与简化 §2-1 力系等效定理 物理学中,关于质点系运动特征量已有明确论述,这就是:质点系的线动量和对某一点的角动量。
物理学中还指明线动量对时间的变化率等于作用在质点系上的合外力;角动量对时间的变化率等于作用在质点系上外力对同一点的合力矩。
这里的合外力,实际上只有大小和方向,并未涉及作用点或作用线。
因而,需要将其中的合外力与外力的合力矩扩展为力系的主矢和主矩。
2-1-1 力系的主矢和主矩 主矢:一般力系(F 1,F 2,…,F n )中所有力的矢量和(图2—1),称为力系的主矢量,简称为主矢(principal vector ),即∑=ni i1R FF =(2-1)图2-1力系的主矢其中F R 为力系主矢;F i 为力系中的各个力。
式(2-1)的分量表达式为∑∑∑======n i iyy ni iyy ni ixx F F FF F F 1R 1R 1R (2-2)主矩:力系中所有力对于同一点之矩的矢量和(图2-2),称为力系对这一点的主矩(principal moment ),即()∑∑==×ni iin i iOO 11Fr F M M == (2-3)主矩的分量式为()()()∑∑∑===n i i Oz Oz ni iOyOy ni i Ox Ox M M M M M M 111F F F === (2-4)力系的主矢不涉及作用点,为滑动矢;力系的主矩与所选的矩心有关,在是因为同一个力对于不同矩心之矩各不相同,主矩为定位矢。
2-1-2 力系等效定理 前已指出,所谓力系等效是指不同的力系对于同一物体所产生的运动效应是相同的,即:不同的力系使物体所产生的线动量对时间的变化率以及角动量对时间的变化率分别对应相等。
亦即:不同力系的主矢以及对于同一矩心的主矩对应相等。
据此,得到如下的重要定理:等效力系定理(theorem of equivalent force systems )—不同的力系对刚体运动效应相同的条件是不同力系的主失以及对于同一点的主矩对应相等。
§2-2 力偶与力偶系 2-2-1 力偶与力偶系 大小相等、方向相反、作用线互相平行但不重合的两个力所组成的力系,称为力偶(couple )。
力偶是一种最基本的力系,但也是一种特殊力系。
力偶中两个力所组成的平面称为力偶作用面(acting plane of a couple )。
力偶中两个力作用线之间的垂直距离称为力偶臂(arm of a couple)。
工程中力偶的实例是很多的。
图2-2 力偶实例驾驶汽车时,双手施加在方向盘上的两个力,若大小相等、方向相反、作用线互相平行,则二者组成一力偶。
这一力偶通过传动机构,使前轮转向。
图2-2所示为专用拧紧汽车车轮上螺母的工具。
加在其上的两个力1F 和2F ,方向相反、作用线互相平行,如果大小相等,则二者组成一力偶。
这一力偶通过工具施加在螺母上,使螺母拧紧。
由两个或者两个以上的力偶所组成的力系,称为力偶系(system of the couples)。
2-2-2 力偶的性质 作用在物体上的力偶将使物体产生什么样的效应?这些效应又如何量度?回答这些问题,首先要看所研究的物体的性质,或物体的模型-刚体还是弹性体。
本章仅研究作用在刚体上的力偶的基本性质。
性质I 力偶没有合力。
力偶虽然是由两个力所组成的力系,但这种力系没有合力。
这是因为力偶的主矢F R =0。
因为力偶没有合力,所以力偶不能与单个力平衡,力偶只能与力偶平衡。
性质Ⅱ 力偶对刚体的作用效应,是使刚体转动。
力偶矩矢量是力偶使刚体产生转动效应的量度。
图2-3 力偶矩矢量考察图2-3所示之由F 和F ′组成的力偶(F ,F ′),其中F ′= —F 。
O 点为空间的任意点。
力偶(F ,F ′)对O 点之矩定义为M O ∑==21i M O (F i )=r A ×F +r B ×F ′=(r A - r B )×F= r BA ×F (2-5)其中r BA 为自B 至A 的矢径。
读者可以任取其它各点,也可以得到同样结果。
这表明:力偶对点之矩与点的位置无关。
于是,不失一般性,式(2-5)可写成M =r BA ×F (2-6)其中的M 称为力偶矩矢量(moment vector of a couple )。
不难看出,力偶矩矢量只有大小和方向,与力矩中心O 点无关,故为自由矢。
根据力偶对刚体的转动效应,除了用两个力(F ,F ′)和力偶矩矢量M 表示外,还可以用力偶作用面内的旋转箭头表示,如图2-4所示。
图2-4 力偶在平面内的符号根据力偶的基本性质,可以得到两个推论: 推论I 只要保持力偶矩矢量不变,力偶(图2-5a)可在其作用面内任意移动和转动(图2-5b 、c),也可以连同其作用面一起、沿着力偶矩矢量作用线方向平行移动(图2-5d),而不会改变力偶对刚体的运动效应。
图2-5 由力偶基本性质得到的推论推论Ⅱ 只要保持力偶矩矢量不变,可以同时改变组成力偶的力和力偶臂的大小,而不会改变力偶对刚体的作用效应(图2-5e)。
有兴趣的读者,可以应用力偶的基本性质,对这两个推论加以证明。
2-2-3 力偶系的合成 由于对刚体而言,力偶矩矢为自由矢量,因此对于力偶系中每个力偶矩矢,总可以平移至空间某一点。
从而形成一共点矢量系,对该共点矢量系利用矢量的平行四边形法则,两两合成,最终得一矢量,此即该力偶系的合力偶矩矢,用矢量式表示为M R = M 1 + M 2 +…+ M n ∑==ni 1M i(2-7)§2-3 力系的简化 所谓力系的简化,就是将由若干力和力偶所组成的一般力系,变为一个力,或一个力偶,或者一个力和一个力偶的简单的、但是等效的情形。
这一过程称为力系的简化(reduction of a force system)。
力系简化的基础是力向一点平移定理。
2-3-1 力向一点平移定理 作用在刚体上的力如果沿其作用线移动,并不会改变力对刚体的作用效应。
但是,如果将作用在刚体上的力从其作用点平行移动到另一点,对刚体的运动效应将会发生改变。
能不能使作用在刚体上的力从一点平移至另一点,而使其对刚体的运动效应保持不变? 答案是肯定的。
图2-6 力向一点平移定理考察图2-6a 所示之作用在刚体上A 点的力F A ,为使这一力等效地从A 点平移至B 点,先在B 点施加平行于力F A 的一对大小相等、方向相反、沿同一直线作用的平衡力A F ′′和AF ′,如图2-6b 所示。
根据加减平衡力系原理,由F A 、A F ′、A F ′′三个力组成的力系与原来作用在A 点的一个力F A 等效。
图2-6b 中所示之作用在A 点的力F A 与作用在B 点的力A F ′′组成一力偶,其力偶矩矢量为M =r BA ×F A ,如图2-6c 所示。
于是,作用在B 点的力AF ′和力偶M 与原来作用在A 点的一个力F A 等效。
读者不难发现,这一力偶的力偶矩等于原来作用在A 点的力F A 对B 点之矩。
上述分析结果表明:作用在刚体上的力可以向任意点平移,平移后应为平移后的这一力与一力偶所替代,这一力偶的力偶矩等于平移前的力对平移点之矩。
这一结论称为力向一点平移定理(theorem of translation of a force )。
2-3-2 空间一般力系的简化 考察作用在刚体上的空间任意力系(,,21F F …n F ,)(three dimensional forces system ),如图2-7a 所示。
现在刚体上任取一点,例如O 点,这一点称为简化中心(reduction center)。
应用力向一点平移定理,将力系中所有的力,,21F F …n F ,逐个向简化中心平移,最后得到汇交于O 点的,由,,21F F …n F ,组成的汇交力系,以及由所有附加力偶,,21M M …,n M 组成的力偶系,如图2-7b 所示。
图2-7 任意力系简化平移后得到的汇交力系和力偶系,可以分别合成一个作用于O 点的合力F R ,以及合力偶O M ,如图2-7c 所示。
其中 F R =∑=ni 1F iO M =∑=ni 1 M i=∑=ni 1OM(F i )其中O M (F i )为平移前力F i 对简化中心O 点之矩。
上述结果表明:空间任意力系向任--点简化,得到一个力和一个力偶。
简化所得到力通过简化中心,其力矢称为力系的主矢,它等于力系中诸力的矢量和并与简化中心的选择无关;简化所得到的力偶的力偶矩矢,即为力系对简化中心的主矩,它等于力系中所有的力对简化中心之矩的矢量和,且与简化中心的选择有关。
有兴趣的读者可以证明,力系对不同点(例如图2-8中的O 点和A 点)的主矩存在下列关系:()()F F r FA B AB M M =+× (2-9)(2-8)图2-8 力系对不同点的主矩关系的证明【例2-1】图2-9中所示为F 1、F 2组成的空间力系,试求力系的主矢F R 以及力系对O 、A 、E 三点的主矩。
图2-9 例2-2图解:令i 、j 、k 为 x 、y 、z 方向的单位矢量,则力系中的二力可写成 j i F 431+= ,j i F 432−= 于是,力系的主矢为 F R ∑==+==21621i i F F Fi这是沿x 轴正方向,数值为6的矢量。