控制电机论文(DOC)
- 格式:doc
- 大小:150.50 KB
- 文档页数:10
电机控制技术论文集电机应用于消费电子、住宅、工业、通用、交通和农业等领域。
下面小编给大家分享一些电机控制技术论文集,大家快来跟小编一起欣赏吧。
电机控制技术论文篇一基于PMAC的电机控制技术研究【摘要】随着科学技术的不断发展,工业水平的不断提升,在世界范围内的先进控制技术得到了很大的提升。
在以往的电机控制中,由于控制器的控制能力有限,使得被控对象在运行时有很大的误差产生,而以PMAC为核心控制器的电机运行设备具有更高的控制能力。
本文在对PMAC运动控制器及直线电机原理进行概述的基础上,重点研究PMAC控制器在直线电机PID调节中的应用,并以具体的实验进行验证。
【关键词】PMAC,PID,直线电机1.引言当今社会,自动控制技术和微型计算机作为高科技时代的领导者,更加严格要求各种自动控制系统的定位精准度,由此,在传统旋转电机的基础上配备一套变换机构而构成的直线运动驱动装置,已难以满足当代控制系统愈发精准的要求,因此直线电机的研究、发展与应用工作成为世界各国当今的发展方向,促使直线电机具有越来越开扩的应用领域。
2.PMAC控制器简介上世纪九十年代,美国Delta Tau公司研发了一种开放式多轴运动控制器,命名为PMAC(Programmable Multi-axis Contro-ller)。
PMAC是具有高性能的伺服控制器,其核心为DSP,它可借助高级语言灵活的控制最多八轴同时运行,还能提供内务处理、运动控制、离散开展、同主机交互等功能。
PMAC是一台完整的可以任务识别的计算机,能自动进行任务等级识别,将高优先级的任务比低优先级的任务先进行操作。
其执行速度、分辨率等指标均高于普通的控制器。
伺服控制分为PID加Notch 和速度、加速度前馈控制。
可与MACRO现场总线的高速环网相连接,直接灵活的对生产线实施控制。
相对于其他运动控制器,PMAC的开放性最为突出。
其内部寄存器可允许用户按照自身需要来使用。
PMAC的A/D和I/O和内部寄存器都是统一编址,A/D和I/O的用法与PMAC其它内存用法相同,具有很强的便利性。
交流电动机的软启动摘要传统的电动机起动控制技术存在起动电流大、使用设备多、起动特性不理想等问题。
软起动技术是近几年发展起来的新技术,采用晶闸管作为电动机主回路的控制器件,达到不同的起动控制特性。
与传统电动机控制相比有很多优点。
文章论述了电动机原理及软起动控制的工作原理,控制电路组成,工作特性曲线。
一.交流电机原理三相异步电动机转子之所以会旋转、实现能量转换,是因为转子气隙内有一个旋转磁场。
下面来讨论旋转磁场的产生。
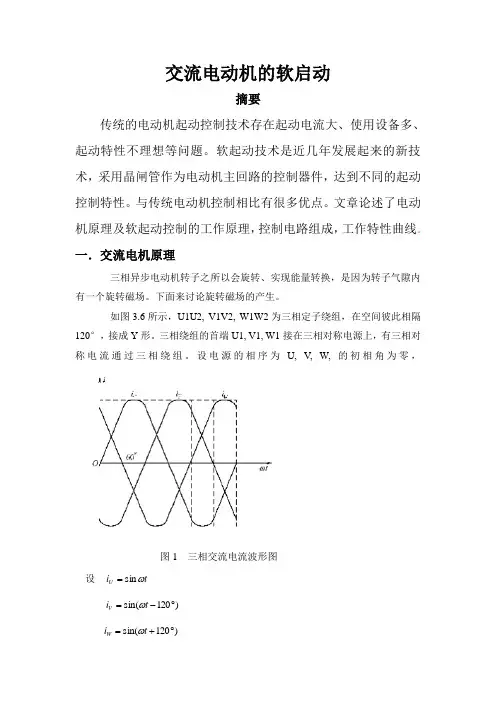
如图3.6所示,U1U2, V1V2, W1W2为三相定子绕组,在空间彼此相隔120°,接成Y 形。
三相绕组的首端U1, V1, W1接在三相对称电源上,有三相对称电流通过三相绕组。
设电源的相序为U, V , W, 的初相角为零,图1 三相交流电流波形图设 t i U ωs i n = )120s i n (︒-=t i V ω )120sin(︒+=t i W ω为了分析方便,假设电流为正值时,在绕组中从始端流向末端,电流为负值时,在绕组中从末端流向首端。
当︒=0t ω的瞬间,U i =0,V i 为负值,W i 为正值。
根据”右手螺旋定则”,三相电流所产生的磁场叠加的结果,便形成一个合成磁场,如图3.7(a )所示,可见此时的合成磁场是一对磁极(即二极),右边是N 极,左边是S 极。
图2 两极旋转磁场示意图• 空间120度 对称分布的三相绕组通过三相对称的交流电流时,产生ii u i vi wi uωt32π34π2π三相电流波形U U V V W W 111222ωt =Iu=ImU U V V W W 111222ωt =2π3Iv=ImU U V V W W 111222ωt =4π3Iw=Im的合成磁场为极对数p=1的空间旋转磁场,每电源周期旋转一周,即两个极距;• ·某相绕组中电流达到最大值时,磁极轴线恰好旋转到该相绕组轴线上。
当︒=90t ω时,即经过1/4周期后,U i 由零变成正的最大值, V i 仍为负值,W i 已变成负值,如图3.6(b )所示,这时合成磁场的方位与︒=0t ω 时相比,已按逆时针方向转过了90°。
摘要控制电机是各种自动化技术的基本环节,它的发展与微电子技术、电力电子技术和自控技术密切相关。
本文系统的阐述了伺服电动机的基本工作原理,伺服电机的分类、特点,并与其他电动机作了简单的对比,伺服电机目前的发展状况以及未来的发展趋势。
随着时代的进步,科学技术的发展,电动机也在迅速发展,性能优越,价格便宜,控制方便的电机更能符合市场的需要和技术的要求。
关键词:伺服电机控制电机工作原理发展现状IAbstractMotor control is the basic link of automation technology, its development and micro-electronics technology, power electronic technology and automatic control technology closely related. This paper introduces the basic working principle of servo motor, servo motor of the classification, characteristics, and the other motor as a simple comparison, servo motor current development status and future developing trend. With the progress of the times, the development of science and technology, the motor is also developing rapidly, superior performance, low price, convenient control of the motor can meet the needs of the market and technical requirements.Key Words:Servo motor Control motor Working principle Development status目录一、伺服电动机的概念 (1)二、伺服电动机的工作原理 (1)三、伺服电动机的分类 (2)四、伺服电动机的特点 (2)五、交流伺服电动机的发展现状 (3)六、与步进电机的性能比较 (4)1、控制精度不同 (4)2、低频特性不同 (4)3、矩频特性不同 (4)4、过载能力不同 (5)5、运行性能不同 (5)6、速度响应性能不同 (5)七、选型计算方法 (5)八、交流伺服电动机的发展趋势 (6)1、高效率化 (6)2、通用化 (6)3、智能化 (6)4、网络化和模块化 (6)5、小型化和大型化 (6)九、结论 (7)十、参考文献 (7)一、伺服电动机的概念用作自动控制装置中执行元件的微特电机。
序号(学号〉: 161240303长春大学 毕业设计(论文)直流电机速度PID 控制系统设计李一丹国际教育学院自动化1612403曹福成2016 年 5 月 30 0姓 名 学 院 专 业 班 级 指导教师直流电机速度PID控制系统设计摘要:针对现有的直流电机控速难的问题,本文设计了一种基于ATmegal6L单片机的直流电机速度控制系统。
本系统以ATinegal6L单片机为主控制器,搭载了L298n为电机驱动,通过霍尔元件进行测速,通过按键控制电机的转动方向和转动速度,并配以温度传感器DS18B20对温度进行监测,通过PID算法调节PW\1 进行对速度控制。
该系统包括的模块主要有单片机为主体的控制模块、电机的驱动模块、对电机速度进行监测的模块、由LCD1602构成的显示ky r模块、电源模块和按键控制模块等。
本系统可以通过PID算法实现可编程脉宽波形对直流电机的速度进行控制,并且可以显示出当前电机的转速。
关键词:单片机;PID算法;直流电机The design of DC motor speed control system with PID Abstract: According to the existing DC motor speed control problem, this paper describes the design of a DC motor speed control system based on ATmegal6L MCU. To ATMEGA16L microcontroller as the main controller for the system, equipped with a L298n for motor drive, through the hall element of speed, through the buttons to control the motor rotation direction and the rotation speed, and the temperature sensor DS18B20 the temperature monitoring, PID algorithm is used to adjust the PWM control of the speed. The system includes the following modules display microprocessor control module, as the main body of the motor drive module, monitoring module, the speed of motor is composed of LCD1602 module, power supply module and key control module.This system can realize through PID algorithm to control the speed of the programming pulse waveforms of DC motor, and can display the current motor speed.Keywords: single chip microcomputer, PID algorithm, DC motor ky r戈ml ml ——II —In —In | * 11—I 1111 ml 1111目录Bit (1)l.i选题背景及意义 (1)1.2国内外研宄现状 (2)1.3木文主要研究的内容 (3)第2章总体方案论述 (4)ky r2.1系统主要传感器介绍 (4)2.1.1温度传感器 (4)2.1.2转速检测模块 (5)2.2系统总体功能及方案选择 (6)2.2.1系统所需模块及功能 (6)2.2.2主控制器选择 (8)第3章系统总体硬件设计 (10)3.1单片机最小系统 (10)3.1.1ATmegal6L单片机的引脚分布 (10)3.1.2最小系统的硬件电路 (13)3.2电机驱动电路 (14)3.3温度检测电路 (15)3.4光电管提示电路和按键控制电路 (15)3.5LCD1602 显示电路 (16)3.6电源电路 (17)3.7本章小节 (18)第4章系统软件设计 (19)4.1系统总体流程图 (19)4.2 PID算法简介 (19)4.2.1PID算法介绍 (20)4.2.2HD算法结果 (21)4.3系统调试步骤 (21)4.4误差分析即改进方法 (22)给论 (23)致谢 (24)参考文献 (25)隱 (26)附录I系统总体硬件电路图 (26)附录II系统中部分程序 (27)ky r In—ml ml ml ml | , I af—.第1章绪论1.1选题背景及意义电动机简称电机,俗称马达,在现实生活中,我们处处都可以见到电机的身影,小到小学生玩的电动四驱车,大到炼钢厂用的滚动罐,这些都是电机家族的成员。

电机控制论文六篇电机掌握论文范文1传统的教学模式通常以课堂灌输与讲授为主,辅以试验巩固。
由于本身课时有限,加之继电器接触器线路的设计应用环节简单,电气元件图形符号种类繁多、PLC寻址方式和基本指令不易识记等,加之双语教学过程中,老师课堂表述英语用量大,同学接受力量参差不齐,造成课堂教学效果很不抱负。
1.中英文双语教学同学听力差异双语教学过程中,既要把机自专业学问讲透,还要大力提升英语表述的比例。
[3]这样造成的结果是,外语听力稍差的同学需要老师重复解释,或者中文翻译,基础好的同学反而收听重复,使得课时进度受到影响,双语教学的效果大打折扣。
2.课堂与试验教学双语比重不同课堂授课使用双语而试验只有中文的教学方法,使得双语教学效果甚微。
依据随机调查反映,课堂教学环节双语教学比重大,同学熟识各个电气元件的英文名称,会用基本的语言进行掌握环节的动作描述,但到了试验与实践环节,遭受了只用中文的尴尬,同学没有配套的双语试验环境。
3.双语教辅和资料配套不足目前在国内外还没有发觉正式出版的针对机自专业电气掌握技术课程的双语或英文原版教材,配套的双语帮助资料、手册等也不多见,无形中增加了双语教学的难度。
4.双语教学的评价方法有待改善依据该课程的性质,在教学考核环节既要注意机自专业学问考核,还要兼顾双语基本素养的考查,更要考核同学语言表达与实际操作等诸多力量,仅靠卷面考试和试验得分的单一评价方法明显不合时宜。
5.其他问题比如课内互动方式、沟通和作业等实践力量培育环节的双语环境建设问题。
二、解决对策1.[4]CDIO理念提出了将同学作为学习的主体,强调同学的主动性,老师只是组织者和管理者,属于次要位置;CDIO理念强调课程之间的有机联系,对同学特殊是老师的思维提出了更高要求;CDIO理念重视同学团队意识和合作意识的培育,取代了同学过多追求高分而“单打独斗”的学习偏见;在教学方法上,提倡以同学主动学习为为主,主讲老师引导关心为辅等等。
浅谈电梯电机控制技术的现状和发展摘要作为垂直交通工具的电梯,在高层建筑、大型商场等公共场所已经成为重要的建筑设备,方便了大家的日常生活,并成为人类物质文明的一种标志。
本文从我国电梯产业和电梯电机的现状出发,全面了解国内外应用现状,并结合当前的电机控制的发展趋势,分析了如何推进电梯电机控制技术的发展方向,提高国产电梯的竞争力。
关键词电梯电机控制vvvf 智能控制中图分类号:tu857文献标识码:a据统计,电梯在最初30年的产销量不足1万台,而仅去年电梯新增就达42万台,远远超过了全世界电梯产量的一半,而如此巨大的产销量也没有达到发达国家的人均拥有电梯量的水平。
每年仅报废更新的电梯就需要近6万台,再加之巨大的安装、维保和质检缺口,就像十几年前的汽车行业,供需两旺,电梯市场前景一片光明。
巨大的市场带来了机遇和挑战,吸引了世界上所有大型电梯公司,也为国内的电梯厂商设立了很高的门槛和技术壁垒。
随着用户对电梯的安全性要求越来越高,对响应速度、运行速度、舒适度也都有很高的要求,我国电梯产业的发展举步维艰。
而我国电机行业随着生产现代化程度的不断提高,以及技术的进步,产品的快速更新换代,所以如何找到电梯行业的突破口,增加产品竞争力是目前摆在所有电梯企业领导目前的一个十分重要的问题。
一、电梯电机的发展电机行业是一个传统的行业,是劳动密集型产业。
经过200多年的发展,它已经成为现代生产、生活中不可或缺的核心、基础,是国民经济中重要的一环。
电机是利用电磁感应原理工作的机械。
控制电机具有高可靠性﹑好精确度﹑快速响应的特点。
由于电力拖动具有控制简单﹑调节性能好﹑耗损小﹑经济,能实现远距离控制和自动控制等一系列优点,因此大多数生产机械都采用电力拖动。
随着设计、评价、测量、控制、功率半导体、轴承、磁性材料、绝缘材料、制造加工技术、电工技术的发展,对电能的转换、控制以及高效使用的要求越来越高,电动机本体经历了轻量化、小型化、高效化、高力矩输出、低噪音振动、高可靠、低成本等一系列变革,相应的驱动和控制装置也更加智能化和程序化。
作业名称:PLC控制电动机正反转可编程控制器(1)期末大作业得分:任课教师:班级:姓名:学号:2011年12月摘要三相异步电动机一般采用降压起动、能耗制动.针对传统的继电器一接触器控制的降压起动、能耗制动方法存在的不足,将OMRON公司的CPM2*型可编程序控制器(PLC)与接触器相结合,用于三相异步电动机的Y一△降压起动、能耗制动控制,改进后的方法克服了传统方法手工操作复杂且不够可靠的缺点,控制简单易行。
关键词:三相异步电动机;PLC控制系统;Abstructthe Three—phase asynchronous motor step—down start,generally USES the braking energy. In traditional relay a contact device control step-down start braking energy, the shortcomings of the methods,the company will CPM2 * type OMRON PLC and contactor, combining for three—phase asynchronous motor step—down start a train of Y,braking energy control, the improved method can overcome the disadvantage of traditional method manual operation complex and not reliable enough shortcomings,simple and easy to control.Key words: the three—phase asynchronous motor; PLC control system引言设计三相异步电动机一般采用降压起动、能耗制动.针对传统的继电器一接触器控制的降压起动、能耗制动方法存在的不足,将OMRON公司的CPM2*型可编程序控制器(PLC)与接触器相结合,用于三相异步电动机的Y一△降压起动、能耗制动控制,改进后的方法克服了传统方法手工操作复杂且不够可靠的缺点,控制简单易行。
软件部分本项目是对直流电机PWM调速器设计的实验,主要实现用单片对电动机的控制。
为实现系统的微机控制,在设计中,采用了STC89C51单片机作为整个控制系统的控制电路的核心部分,并用电动机驱动芯片L293D驱动电机,配以数码管显示,光电码盘模块,实现对电动机的转速的显示和测量;输入采用独立式键盘作为命令的输入,单片机在程序的控制下,不断产生PWM波形,H型驱动电路完成电机的正反转控制。
在设计中,采用PWM控制方式,通过改变PWM的占空比从而改变电动机的电枢电压,并采用PI算法调节占空比进而实现对电动机的速度控制。
设计的整个控制系统,在硬件结构上采用了大量的集成电路模块,大大的简化了硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。
(一)直流电机额定功率Pn:在额定电流和电压下,电机的负载能力。
额定电压Ue:长期运行的最高电压。
额定电流Ie:长期运行的最大电流。
额定转速n:单位时间里面电机转速的快慢。
励磁电流If:施加到电极线圈上的电流。
1.调速范围调速范围是指最低可控转速到最高可控转速的范围,最低可控转速对最高可控转速的比值,叫电机的调速比。
2.调速的相对稳定性和静差度所谓相对稳定性,是指负载转矩在给定的范围里面变化所引起的速度的变化,它决定于机械特性的斜率。
静差度(又称静差率)是指当电动机在一条机械特性上运行时,由理想空载到满载时的转速降落与理想空载转速n0的比值。
用百分数表示,即,在一般的情况下,取额定转矩下的速度落差,有3.调速的平滑性调速的平滑性是在一定的调速范围内,相邻两极速度变化的程度,用平滑系数表示,即式中和相邻两极,即i级与i-1级的速度4.调速时的容许输出调速时的容许输出是指电动机在得到充分利用的情况下,在调速的过程中轴能够输出的功率和转矩。
(二)STC89C51单片机STC89C51单片机是一款低功耗、低电压、高性能CMOS8位单片机,片内含8KB(可经受1000次擦写周期)的FLASH可编程可反复擦写的只读程序存储器(EPROM),器件采用CMOS工艺和ATMEL公司的高密度,非易失性存储器(NURAM)技术制造,其输出引脚和指令系统都与MCS-51兼容,片内的FLASH存储器允许在系统内可改编程序或用常规的非易失性存储编程器来编程。
无刷直流电动机控制系统设计方案摘要无刷直流电动机是在有刷直流电动机的基础上发展起来的。
现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到普遍的关注。
自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用也因此而迅速增长。
本设计是把无刷直流电动机作为电动自行车控制系统的驱动电机,以PIC16F72单片机为控制电路,单片机采集比较电平及电机霍尔反馈信号,通过软件编程控制无刷直流电动机。
关键词无刷直流电动机单片机霍尔位置传感器AbstractBrushless DC motor in a brush DC motor developed on the basis of. At this stage, although exchanges of all kinds of DC motors and motor drive in the application of the dominant, but brushless DC motor is under common concern。
Since the 1990s,as people's living standards improve and modernize production, the development of office automation, household appliances, industrial robots and other equipment are increasingly tend to be high efficiency,small size and high intelligence, as the implementation of components An important component of the motor must have a high accuracy, speed, high efficiency, brushless DC motor and therefore the application is also growing rapidly.This design is the brushless DC motor as the electric bicycle motor—driven control system, PIC16F72 microcontroller for control circuit, SCM collection and comparison—level electrical signal Hall feedback, software programming through brushless DC motor control . Key words bldcm the single chip processor hall position sensor 摘要 (I)Abstract (II)第1章概述 (1)1。
当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流驱动控制作为电气传动的主流在现代化生产中起着主要作用。
长期以来,直流电机因其转速调节比较灵活,方法简单,易于大范围平滑调速,控制性能好等特点,一直在传动领域占有统治地位。
它广泛应用于数控机床、工业机器人等工厂化设备中。
随着现代化生产规模的不断扩大,各个行业对直流电机的需求愈益增大,并对其性能提出了更高的要求。
为此,研究并制造高性能、高可靠性的直流电机控制系统有着十分重要的现实意义。
本设计通过PWM方式控制直流电机调速,采用了C语言来控制单片机产生PWM 信号,将信号输入L298N芯片驱动电机,通过改变输入电压的占空比,从而实现直流电机速度的控制。
论文针对所设计的控制方案对控制系统的软、硬件设计作了详细论述。
硬件部分先作了整体设计,然后介绍了以AT89S51单片机为核心的硬件构成,对调速电路、检测电路、显示电路等作了详细阐述;软件部分采用模块化设计思想,论述了软件的设计思想和方法;实现了对直流电机的快速启动和停止,电机转速的设置、调控和显示功能。
利用AT89S51芯片进行低成本直流电动机控制系统的设计,能够简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。
关键词:单片机;PWM;直流电机;转速控制1 / 44Nowadays, automatic control system has been widely used and greatly developed in all walks of life. As the dominant part of electric drive, direct current (DC) control plays an important role in modern production. For a long time, DC motors hold a dominant position in transmission field with the characteristics of more flexible and simple speed adjustment, smoothly timing in a large scale, and good control performance. DC motors are widely used in factory equipment of numerical control machine, industrial robot, etc. With the constant expansion of modern production, the demand for DC motors is increased and a higher request is put forward. Thus, it is of great practical significance to research and make a high performance and reliability DC motor control system.The design controls DC motors speed regulation through the method of PWM, uses C language to control the microcontroller and then generates PWM signals. It is to input the signals into L298N drive chip, by using the control method of changing the duty ratio of the input voltage, and then make the DC motor speed control come true.The paper makes a detailed discussion on software and hardware of controlling system on the basis of the designed control system. After a dissertation on the whole design of, hardware structure with AT89S51 microcontroller as the core is introduced, and then speed control circuit, detection circuit and display circuit are expounded. In the part of software, module idea is adopted, the design idea and method is discussed and setting, start, stop, controlling and display functions of the DC electrical motor rotation parameters are achieved. The design of using AT89S51 chip to do low cost DC electrical motor control system can simplify system structure, reduce system cost, enhance system performance and meet more application needs.Key words:microcontroller; PWM; DC electrical motor; speed control1 / 44目录引言 (1)1 总体方案设计 (1)1.1任务要求 (1)1.2 方案论证 (1)1.2.1电机调速控制模块的选择方案 (1)1.2.2电机测速模块的选择方案 (2)1.2.3电机转速显示模块的选择方案 (2)1.2.4控制器的选择方案 (3)1.3 总体方案选择 (3)2 硬件电路的设计 (4)2.1 AT89S51单片机最小系统电路 (4)2.1.1AT89S51单片机芯片简介 (4)2.1.2AT89S51的管脚排列 (4)2.1.3晶振电路 (5)2.1.4复位电路 (5)2.2 转速检测电路 (6)2.2.1霍尔元件3144简介 (7)2.2.2霍尔元件的使用注意事项 (7)2.2.3霍尔元件3144的电路设计 (7)2.3 数码管显示电路 (8)2.3.1数码管简介 (8)2 / 442.3.3数码管显示电路设计 (9)2.4 单片机ISP下载电路 (9)2.5 电机驱动电路 (10)2.5.1L298N芯片简介 (10)2.5.2驱动电路设计 (11)2.5.3保护电路设计 (12)3 电机调速设计 (12)3.1 PWM控制技术 (12)3.1.1PWM简介 (12)3.1.2PWM优点 (13)3.2 电机调速控制 (13)3.2.1调速原理 (13)3.2.2实现方法 (14)4 系统软件设计 (14)4.1 程序设计流程图 (14)4.2 单片机片内定时计数器介绍 (15)4.2.1定时计数器的结构 (15)4.2.2定时计数器的工作寄存器TMOD和TCON (15)4.3 片内中断系统简介 (16)4.3.1中断的概念 (16)4.3.2中断控制寄存器IE、IP (17)4.4 数码管显示程序的设计 (18)3 / 444.4.2转速显示实时更新的程序设计 (19)4.5 直流电机启动、停止程序的设计 (20)4.6 电机自动调速程序设计 (21)5 系统调试与数据测试 (23)5.1 系统调试 (23)5.1.1元件焊接与整板测试 (23)5.1.2系统软件调试 (24)5.2 系统实验 (24)5.2.1测试方法 (24)5.2.2测试结果分析 (24)6 结论 (25)谢辞 (26)参考文献 (27)附录 (28)附录一:系统原理图 (28)附录二:系统PCB (28)附录三:程序清单 (29)4 / 445 / 44引言直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
PLC控制电机正反转(毕业论文)继续教育学院毕业设计(论文)题目:星三启动可逆运行电动机的PLC控制系统的设计院、系(站):渭南工业学校函授站学科专业:机电一体化技术学生:韦坤学号:1070212200033指导老师:刘碧波2012年12月摘要可编程控制器(PLC)是以微处理器为核心,将自动控制技术、计算机技术和通信技术融为一体而发展起来的崭新的工业自动控制装置。
目前PLC已基本替代了传统的继电器控制而广泛应用于工业控制的各个领域,PLC已跃居工业自动化三大支柱的首位。
生产机械往往要求运动部件可以实现正反两个方向的起动,这就要求拖动电动机能作正、反向旋转。
由电机原理可知,改变电动机三相电源的相序,就能改变电动机的转向。
按下正转启动按钮SB1,电动机正转运行,且KM1,KMY接通。
2s后KMY断开,KM 接通,即完成正转启动。
按下停止按钮SB2,电动机停止运行。
按下反转启动按钮SB3,电动机反转运行,且KM2,KMY接通。
2s后KMY断开,KM 接通,即完成反转启动。
目录第一章PLC概述 (1)1.1 PLC的产生 (1)1.2 PLC的定义 (1)1.3 PLC的特点及应用 (2)1.4 PLC的基本结构 (4)第二章三相异步电动机控制设计 (7)2.1 电动机可逆运行控制电路 (7)2.2 启动时就星型接法30秒后转为三角形运行直到停止反之亦然 (9)2.3. 三相异步电动机正反转PLC控制的梯形图、指令表 (12)2.4 三相异步电动机正反转PLC控制的工作原理 (13)2.5 指令的介绍 (14)结论 (16)致谢 (17)参考文献 (18)第一章PLC概述1.1 PLC的产生1969年,美国数字设备公司(DEC)研制出了世界上第一台可编程序控制器,并应用于通用汽车公司的生产线上。
当时叫可编程逻辑控制器PLC(Programmable Logic Controller),目的是用来取代继电器,以执行逻辑判断、计时、计数等顺序控制功能。
《控制电机》论文指导老师: __***__学生姓名: ___**____学号: _**********_班级: __Z电气111_专业:电气工程及其自动化电气工程学院2014.5.1引言本篇论文是基于这一学期以来对《控制电机》这门学科学习与个人感悟而撰写的。
本篇论文选择的课题是力矩式自整角机。
全篇论文主要阐述了力矩式自整角机的原理、主要特性以及力矩式自整角机的应用,从这三个方面展示出个人对力矩式自整角机的学习及认识整角机作为精密旋转伺服元件广泛地应用在近代技术的各个领域。
随着科学的发展,自整角机面临着许多特殊要求和特殊应用,研讨这些新课题,有利于发展新品种。
七十年代以来,国内发展了控制-力矩式自整角机(ZKL)系列。
这种自整角机同时兼有控制式自整角变压器和力矩式自整角机的双重功能,既可以在控制式系统中作自整角变压器,经过线路换接,又可在力矩式系统中作自整角接收机。
其结构特征是定子(或转子)放置星形连接的三相整步绕组(和传统的自整角机三相绕组相同),转子(或定子)放置两个空间垂直的单相绕组,其中一个绕组作为控制式自整角变压器的输出绕组,另一绕组作为力。
由于我国经济发展迅速,工农业生产和日常生活中使用的电动机种类和数量日益增加,且性能各异,因此,必须熟悉各类电动机和负载机械设备的类型、结构、性能及用途等,使其能安全、高效、经济地去拖动各种负载机械设备。
本篇论文对力矩式自整角机既有理论论述,又有实际应用介绍,具有全面性、系统性、实用性、可读性的特点,避免繁琐的数学运算和高深的理论,从实际出发,深入浅出,涉及的范围广,内容丰富,特别是有具体的实例介绍,对于学习力矩式自整角机的应用具有重要的参考价值。
力矩式自整角机的原理及应用1160601150 周灵一、力矩式自整角机的工作原理:力矩式自整角机的原理图如图1所示。
假定各相整步绕组参数相同,两台自整角机参数相同。
在自整角机中,以a相整步绕组轴线和励磁绕组轴线之间的夹角,作为转子的转角。
如图1所示,发送机转子的转角为θ1,接收机转子的转角为θ2,发送机和接收机转角的差值,称为失调角θ,定义为θ=θ1-θ2。
自整角机的整步绕组为星形连接,图1中特意画出中线,是为了分析方便,实际应用中并没有接这条线,这是有原因的,后面的分析将会说明这一点。
由于中线的存在,在两台自整角机之间就构成了三个回路。
它们分别是a相整步绕组在a相整步绕组回路中,电流的有效值Ia应为两台自整角机的感应电势的有效值的差值与a相整步绕组回路阻抗2Za的比值,按图5-2的参考方向,有:a a1a2a2Z EE I -=( 5 -1)式中,a2E——接收机感应电势的有效值;a1E——发送机感应电势的有效值;aZ—— a相整步绕组的阻抗。
根据和旋转变压器类似的分析,E2a这个感应电动势来源于接收机励磁绕组磁场的变化。
具体大小取决于接收机a相整步绕组和接收机励磁绕组轴线的角度。
假设该角度为θ2角,接收机励磁绕组磁场的幅值为Φd,在接收机a相整步绕组中,感应电动势的有效值为E2a = 4.44 f N K Φd cos θ2 = E cos θ2同理,在发送机a 相整步绕组中,感应电动势的有效值为E1a = 4.44 f N K Φd cos θ1 = E cos θ1 (5-2) 式中,Φd —— 直轴绕组(励磁绕组)磁通的幅值;K —— 整步绕组的基波绕组系数;E —— 接收机a 相整步绕组和接收机励磁绕组轴线重合时所能产生最大感应电动势的有效值。
由式(5-1)得到a 相整步绕组回路感应电流的有效值为=a I a Z E 2)cos (cos 12θθ-2sin 2sin 21θθθ+=I (5-3) 式中,I —— 最大感应电流的有效值。
a Z EI 22=,最大感应电流的产生条件是a 相整步绕组回路出现最大感应电动势2E ,数学推算可以得出,在θ1 = 180°并且在θ2 = 0°时就会引起最大感应电流。
同理,在b 相整步绕组回路和c 相整步绕组回路分别进行分析,可以得到各自回路的感应电流的有为:2sin )1202sin(21b θθθ -+=I I (5-4) 2sin )1202sin(21c θθθ ++=I I (5-5)a 相整步绕组回路,b 相整步绕组回路和c 相整步绕组回路的电流都流经中线,因此,中线上的总电流为:In = Ia + Ib + Ic将式(5-3)、式(5-4)和式(5-5)代入,并经过三角公式的展开,可以得到中线上的总电流为:In = Ia + Ib + Ic = 0因此中线上的总电流In 为零,实际使用中可以不接中线。
图1中所示中线可以省去不接。
各相整步绕组产生感应电流之后,由于电生磁的关系,感应电流必然在各相产生感应磁场,这些磁场大小可以用磁势表示。
a 相整步绕组回路中,通过发送机整步绕组和接收机整步绕组的电流相等,因此发送机整步绕组的磁势的幅值F1a 等于接收机整步绕组的磁势的幅值F2a F1a = F2a NK I a 2π4= (5-6) 式中,2 —— 常数因子,是将电流有效值a I 变为电流幅值而带来的; π4—— 常数因子,是将方波磁势近似看作正弦波磁势所带来的,在方波磁势的傅里叶级数展开式中,只取基波)1(=ω所占的一项,忽略其余各项:++=t t t F 3sin π34sin π4)( 同理,对于b 相整步绕组回路和c 相整步绕组回路的感应电流所产生的感应磁场,也可以用磁势表示如下:F1b = F2b =NK I b 2π4 (5-7)F1c = F2c =NK I c 2π4 (5-8)下面将对发送机和接收机的合成磁势情况分别进行分析。
对于发送机,分析方法是将各相整步绕组产生的感应磁势进行合成。
将各相整步绕组产生的磁势都在直轴d 轴方向和交轴q 轴方向进行投影,每相整步绕组的感应磁势都得到两个分量。
直轴d 轴方向即沿励磁绕组轴线方向向上,交轴q 轴方向即直轴d 轴方向逆时针旋转90°所得到的参考方向。
最后将每相的磁势的直轴分量相加,将每相的磁势的交轴分量相加,得到直轴磁势分量F1d 和交轴磁势分量F1q ,再利用正交合成得到一个合成磁势F1。
对于接收机,也采用同样的方法将各相整步绕组产生的感应磁势进行合成。
得到直轴磁势分量F2d 、交轴磁势分量F2q 以及合成磁势F2。
发送机和接收机的各个磁势分量的关系如图2所示。
对于发送机,直轴磁势分量为:F1d = F1a cos θ1 + F1b cos(θ1-120°) + F1c cos(θ1 +120°)1a cos 2π4θNK I =)120cos(2π41b ︒-+θNK I )120cos(2π41c ︒++θNK I)cos 1(2π443θ--=INK= )cos 1(43m θ--F (5-9) 式中,Fm —— 各相整步绕组产生的最大基波磁势的幅值,当两台自整角机的a 相整步绕组轴线与各自的励磁绕组轴线重合时,产生最大基波磁势。
同理求得发送机交轴磁势分量F1q 为:F1q = -F1a sin θ1-F1b sin(θ1-120°) -F1c sin(θ1 + 120°) 图2 发送机和接收机的各个磁势分量发送机接收机= θsin 43m F - (5-10)发送机的直轴磁势分量F1d 以及交轴磁势分量F1q 已经得出,利用正交合成得到一个发送机的合成磁势F1 F1 = 2sin 23m 2q 12d 1θF F F =+ (5-11)发送机的合成磁势与交轴的夹角1α1α = 2||||arctan 1q d 1θ=F F (5-12)对于接收机进行类似分析,可以得到接收机的感应磁势的各个量的大小: 求出直轴磁势分量F2dF2d = – F2a cos θ2 – F2b cos(θ2 – 120°) – F2c cos(θ2 + 120°) = )cos 1(43m θ--F接收机交轴磁势分量F2q 为:F2q = F2a sin θ2 + F2b sin(θ2 - 120°) + F2c sin(θ2 + 120°) = θsin 43m F故接收机的合成磁势F2 F2 =2sin 23m 22q 22d θF F F =+ (5-13)接收机的合成磁势与交轴的夹角2α2α = 2||||arctan 2q 2d θ=F F (5-14)发送机和接收机的直轴磁场、直轴磁势分量、交轴磁势分量、合成磁势均已标在图2中。
分析的逻辑顺序是先有直轴磁场,后有感应磁场。
后产生的感应磁场用了直轴磁势分量、交轴磁势分量、合成磁势三个量来描述。
发送机和接收机各自的感应磁场将与原来的直轴磁场相互作用,产生自动整步的动作。
二、 力矩式自整角机的主要特性1.发送机的直轴磁势分量为负值由表达式F 1d = )cos 1(43m θ--F直轴磁势分量为负值,这说明直轴电枢反应为去磁作用。
为了维持直轴磁通的不变,励磁绕组将会自动增大电流,从电源多吸收能量,这是能量守恒原理的体现,因为多吸收的能量要用于发送机电机转动所需要的能量。
2.接收机的直轴磁势分量为负值由表达式F 2d = )cos1(43mθ--F接收机的直轴磁势分量也为负值,这说明接收机直轴电枢反应也为去磁作用。
产生这个直轴感应磁势分量必然引起接收机电机的转动,从而消耗了能量,根据能量守恒原理,励磁绕组将会增大电流,从电源多吸收这部分能量。
3.各磁势分量与位置角无关发送机和接收机中的直轴磁势分量、交轴磁势分量和合成磁势的大小,与发送机和接收机的位置角无关,仅为失调角θ的函数。
4.发送机和接收机磁势分量绝对值相等发送机和接收机整步绕组感应磁势的直轴分量大小相等,方向相同;交轴分量大小相等,方向相反。
5.直轴磁势分量可以忽略在实际运行中,发送机和接收机的失调角很小,大约几度的数量级。
根据直轴磁势分量和交轴磁势分量的表达式可以得出,直轴磁势分量和交轴磁势分量相比很小,在某些情况下可以忽略。
6. 各磁势分量同时为零失调角θ为零时,各相整步绕组的感应电流为零,因此发送机和接收机的直轴磁势分量、交轴磁势分量、合成磁势三个量均同时为零。
7、力矩式自整角机的转矩发送机和接收机各自的感应磁场将与原来的直轴磁场相互作用,产生某种动作。
当力矩式自整角机失调角为θ时,作用在电机轴上的电磁转矩称为为整步转矩,从本质上说,它是由三个整步绕组中的感应电流和直轴磁场相互作用而产生的。
如果简化分析,可以直接理解为感应磁场将与原来的直轴磁场的相互作用。
先从磁场相互作用的角度来分析发送机和接收机各自的转矩:当两个磁场方向不一致时,磁场会有对齐的趋势,并产生对齐的转矩。