控制电机论文
- 格式:doc
- 大小:456.00 KB
- 文档页数:15
电机控制技术论文集电机应用于消费电子、住宅、工业、通用、交通和农业等领域。
下面小编给大家分享一些电机控制技术论文集,大家快来跟小编一起欣赏吧。
电机控制技术论文篇一基于PMAC的电机控制技术研究【摘要】随着科学技术的不断发展,工业水平的不断提升,在世界范围内的先进控制技术得到了很大的提升。
在以往的电机控制中,由于控制器的控制能力有限,使得被控对象在运行时有很大的误差产生,而以PMAC为核心控制器的电机运行设备具有更高的控制能力。
本文在对PMAC运动控制器及直线电机原理进行概述的基础上,重点研究PMAC控制器在直线电机PID调节中的应用,并以具体的实验进行验证。
【关键词】PMAC,PID,直线电机1.引言当今社会,自动控制技术和微型计算机作为高科技时代的领导者,更加严格要求各种自动控制系统的定位精准度,由此,在传统旋转电机的基础上配备一套变换机构而构成的直线运动驱动装置,已难以满足当代控制系统愈发精准的要求,因此直线电机的研究、发展与应用工作成为世界各国当今的发展方向,促使直线电机具有越来越开扩的应用领域。
2.PMAC控制器简介上世纪九十年代,美国Delta Tau公司研发了一种开放式多轴运动控制器,命名为PMAC(Programmable Multi-axis Contro-ller)。
PMAC是具有高性能的伺服控制器,其核心为DSP,它可借助高级语言灵活的控制最多八轴同时运行,还能提供内务处理、运动控制、离散开展、同主机交互等功能。
PMAC是一台完整的可以任务识别的计算机,能自动进行任务等级识别,将高优先级的任务比低优先级的任务先进行操作。
其执行速度、分辨率等指标均高于普通的控制器。
伺服控制分为PID加Notch 和速度、加速度前馈控制。
可与MACRO现场总线的高速环网相连接,直接灵活的对生产线实施控制。
相对于其他运动控制器,PMAC的开放性最为突出。
其内部寄存器可允许用户按照自身需要来使用。
PMAC的A/D和I/O和内部寄存器都是统一编址,A/D和I/O的用法与PMAC其它内存用法相同,具有很强的便利性。
交流电动机的软启动摘要传统的电动机起动控制技术存在起动电流大、使用设备多、起动特性不理想等问题。
软起动技术是近几年发展起来的新技术,采用晶闸管作为电动机主回路的控制器件,达到不同的起动控制特性。
与传统电动机控制相比有很多优点。
文章论述了电动机原理及软起动控制的工作原理,控制电路组成,工作特性曲线。
一.交流电机原理三相异步电动机转子之所以会旋转、实现能量转换,是因为转子气隙内有一个旋转磁场。
下面来讨论旋转磁场的产生。
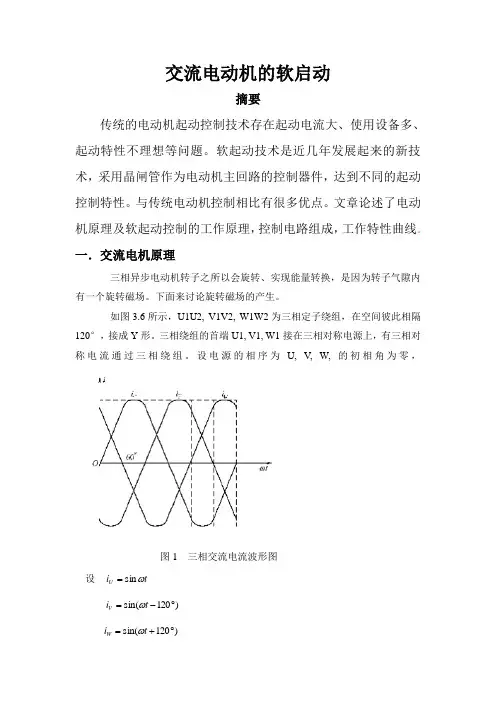
如图3.6所示,U1U2, V1V2, W1W2为三相定子绕组,在空间彼此相隔120°,接成Y 形。
三相绕组的首端U1, V1, W1接在三相对称电源上,有三相对称电流通过三相绕组。
设电源的相序为U, V , W, 的初相角为零,图1 三相交流电流波形图设 t i U ωs i n = )120s i n (︒-=t i V ω )120sin(︒+=t i W ω为了分析方便,假设电流为正值时,在绕组中从始端流向末端,电流为负值时,在绕组中从末端流向首端。
当︒=0t ω的瞬间,U i =0,V i 为负值,W i 为正值。
根据”右手螺旋定则”,三相电流所产生的磁场叠加的结果,便形成一个合成磁场,如图3.7(a )所示,可见此时的合成磁场是一对磁极(即二极),右边是N 极,左边是S 极。
图2 两极旋转磁场示意图• 空间120度 对称分布的三相绕组通过三相对称的交流电流时,产生ii u i vi wi uωt32π34π2π三相电流波形U U V V W W 111222ωt =Iu=ImU U V V W W 111222ωt =2π3Iv=ImU U V V W W 111222ωt =4π3Iw=Im的合成磁场为极对数p=1的空间旋转磁场,每电源周期旋转一周,即两个极距;• ·某相绕组中电流达到最大值时,磁极轴线恰好旋转到该相绕组轴线上。
当︒=90t ω时,即经过1/4周期后,U i 由零变成正的最大值, V i 仍为负值,W i 已变成负值,如图3.6(b )所示,这时合成磁场的方位与︒=0t ω 时相比,已按逆时针方向转过了90°。
摘要控制电机是各种自动化技术的基本环节,它的发展与微电子技术、电力电子技术和自控技术密切相关。
本文系统的阐述了伺服电动机的基本工作原理,伺服电机的分类、特点,并与其他电动机作了简单的对比,伺服电机目前的发展状况以及未来的发展趋势。
随着时代的进步,科学技术的发展,电动机也在迅速发展,性能优越,价格便宜,控制方便的电机更能符合市场的需要和技术的要求。
关键词:伺服电机控制电机工作原理发展现状IAbstractMotor control is the basic link of automation technology, its development and micro-electronics technology, power electronic technology and automatic control technology closely related. This paper introduces the basic working principle of servo motor, servo motor of the classification, characteristics, and the other motor as a simple comparison, servo motor current development status and future developing trend. With the progress of the times, the development of science and technology, the motor is also developing rapidly, superior performance, low price, convenient control of the motor can meet the needs of the market and technical requirements.Key Words:Servo motor Control motor Working principle Development status目录一、伺服电动机的概念 (1)二、伺服电动机的工作原理 (1)三、伺服电动机的分类 (2)四、伺服电动机的特点 (2)五、交流伺服电动机的发展现状 (3)六、与步进电机的性能比较 (4)1、控制精度不同 (4)2、低频特性不同 (4)3、矩频特性不同 (4)4、过载能力不同 (5)5、运行性能不同 (5)6、速度响应性能不同 (5)七、选型计算方法 (5)八、交流伺服电动机的发展趋势 (6)1、高效率化 (6)2、通用化 (6)3、智能化 (6)4、网络化和模块化 (6)5、小型化和大型化 (6)九、结论 (7)十、参考文献 (7)一、伺服电动机的概念用作自动控制装置中执行元件的微特电机。
基于PLC的步进电机控制系统设计机械电子专业 XXX指导教师 XXX摘要:以德国西门子公司小型可编程逻辑控制器S7—200为中央处理单元,以步进电机作为控制对象。
介绍了PLC的概念原理以与控制的优点,步进电机的概念与工作原理,现状以与发展方向。
PLC 与步进电动机一起结合起来有很高的研究价值与意义。
本文在介绍步进电机控制特点的基础上,重点研究了步进电机的控制策略。
设计了控制系统的硬件方案,并编写了相应的控制流程,测试了实际控制效果,并提出相应的整改措施,达到更加合理高效的目标。
对于使用步进驱动器的步进控制系统,控制器对步进电机的控制关键在于控制脉冲信号的产生。
介绍了使用该控制器产生控制脉冲信号的多种不同实现方法,进而实现对步进电机不同控制方法。
关键词:可编程逻辑控制器;步进电机;控制策略;控制流程The Research Of Stepper Control Method Motor Based OnPLC Student majoring inMachinery and electronics specialtyXXXTutorXXXAbstract:With small Germany Siemens S7-200 programmable logic controller of the central processing unit, with stepping motor as control object. This paper introduces the concept of PLC principle and advantage of the control, the concept and working principle of stepper motor, the current situation and development direction. PLC combined with stepper motor has a high research value and significance. In this paper, based on the introduction to the characteristics of the stepper motor control, step motor control strategies are researched. Design the hardware of the control system scheme, and write the corresponding control process, test the actual control effect, and puts forward the corresponding rectification measures, achieve more reasonable and efficient. For using stepper drive stepper control system, the controller of stepper motor control is the key to control the generation of pulse signal. This paper introduces the control using the controller a variety of different implementation methods of the pulse signal, then the method to realize different control the stepper motor.1 / 23Keywords:Programmable logic controller; Stepping motor; The control strategy; Control the process引言伴随着经济的快速发展,科技的日新月异,产品更新换代周期缩短,生产效率有了更高的要求,特别是计算机技术的广泛的推广和普与,信息产业发挥了它无与伦比的优越性和高效性,其中可编程逻辑器件就有了更多的用武之地。
《控制电机》论文指导老师: __***__学生姓名: ___**____学号: _**********_班级: __Z电气111_专业:电气工程及其自动化电气工程学院2014.5.1引言本篇论文是基于这一学期以来对《控制电机》这门学科学习与个人感悟而撰写的。
本篇论文选择的课题是力矩式自整角机。
全篇论文主要阐述了力矩式自整角机的原理、主要特性以及力矩式自整角机的应用,从这三个方面展示出个人对力矩式自整角机的学习及认识整角机作为精密旋转伺服元件广泛地应用在近代技术的各个领域。
随着科学的发展,自整角机面临着许多特殊要求和特殊应用,研讨这些新课题,有利于发展新品种。
七十年代以来,国内发展了控制-力矩式自整角机(ZKL)系列。
这种自整角机同时兼有控制式自整角变压器和力矩式自整角机的双重功能,既可以在控制式系统中作自整角变压器,经过线路换接,又可在力矩式系统中作自整角接收机。
其结构特征是定子(或转子)放置星形连接的三相整步绕组(和传统的自整角机三相绕组相同),转子(或定子)放置两个空间垂直的单相绕组,其中一个绕组作为控制式自整角变压器的输出绕组,另一绕组作为力。
由于我国经济发展迅速,工农业生产和日常生活中使用的电动机种类和数量日益增加,且性能各异,因此,必须熟悉各类电动机和负载机械设备的类型、结构、性能及用途等,使其能安全、高效、经济地去拖动各种负载机械设备。
本篇论文对力矩式自整角机既有理论论述,又有实际应用介绍,具有全面性、系统性、实用性、可读性的特点,避免繁琐的数学运算和高深的理论,从实际出发,深入浅出,涉及的范围广,内容丰富,特别是有具体的实例介绍,对于学习力矩式自整角机的应用具有重要的参考价值。
力矩式自整角机的原理及应用1160601150 周灵一、力矩式自整角机的工作原理:力矩式自整角机的原理图如图1所示。
假定各相整步绕组参数相同,两台自整角机参数相同。
在自整角机中,以a相整步绕组轴线和励磁绕组轴线之间的夹角,作为转子的转角。

电机控制论文六篇电机掌握论文范文1传统的教学模式通常以课堂灌输与讲授为主,辅以试验巩固。
由于本身课时有限,加之继电器接触器线路的设计应用环节简单,电气元件图形符号种类繁多、PLC寻址方式和基本指令不易识记等,加之双语教学过程中,老师课堂表述英语用量大,同学接受力量参差不齐,造成课堂教学效果很不抱负。
1.中英文双语教学同学听力差异双语教学过程中,既要把机自专业学问讲透,还要大力提升英语表述的比例。
[3]这样造成的结果是,外语听力稍差的同学需要老师重复解释,或者中文翻译,基础好的同学反而收听重复,使得课时进度受到影响,双语教学的效果大打折扣。
2.课堂与试验教学双语比重不同课堂授课使用双语而试验只有中文的教学方法,使得双语教学效果甚微。
依据随机调查反映,课堂教学环节双语教学比重大,同学熟识各个电气元件的英文名称,会用基本的语言进行掌握环节的动作描述,但到了试验与实践环节,遭受了只用中文的尴尬,同学没有配套的双语试验环境。
3.双语教辅和资料配套不足目前在国内外还没有发觉正式出版的针对机自专业电气掌握技术课程的双语或英文原版教材,配套的双语帮助资料、手册等也不多见,无形中增加了双语教学的难度。
4.双语教学的评价方法有待改善依据该课程的性质,在教学考核环节既要注意机自专业学问考核,还要兼顾双语基本素养的考查,更要考核同学语言表达与实际操作等诸多力量,仅靠卷面考试和试验得分的单一评价方法明显不合时宜。
5.其他问题比如课内互动方式、沟通和作业等实践力量培育环节的双语环境建设问题。
二、解决对策1.[4]CDIO理念提出了将同学作为学习的主体,强调同学的主动性,老师只是组织者和管理者,属于次要位置;CDIO理念强调课程之间的有机联系,对同学特殊是老师的思维提出了更高要求;CDIO理念重视同学团队意识和合作意识的培育,取代了同学过多追求高分而“单打独斗”的学习偏见;在教学方法上,提倡以同学主动学习为为主,主讲老师引导关心为辅等等。
目录一、可行性报告 (2)1、项目目的 (2)2、项目背景及发展概况 (2)3、可行性 (3)二、设计说明 (3)1、器材 (3)2、整体思路 (4)3、系统流程图 (4)4、实验步骤 (5)三、三相异步电机的正反转PLC控制 (5)3.1 PLC定时器控制电动机正反转电路的主接线图 (7)3. 2 PLC定时器控制三相异步电动机正反转的梯形图 (8)3.3定时器控制电动机正反转的指令表程序 (9)3.4 PLC的I/O分配 (10)3.5 实体框形图 (11)结论.................................................................... 错误!未定义书签。
电机控制一、可行性报告1、项目目的1)、了解机床电气中三相电机的正反转控制和星三角启动控制。
2)、掌握电动机的常规控制电路设计。
3)、了解电动机电路的实际接线。
4)、掌握GE FANUC 3I 系统的电动机启动程序编写。
2、项目背景及发展概况三相异步电动机的应用非常广泛,具有机构简单,效率高,控制方便,运行可靠,易于维修成本低的有点,几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三相异步电动机运行的环境不同,所以造成其故障的发生也很频繁,所以要正确合理的利用它,要合理的控制它。
这个系统的控制是采用PLC的编程语言----梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程。
长期以来,PLC始终处于工业自动化控制领域的主战场,为各种各样的自动化设备提供了非常可靠的控制应用,它能够为自动化控制应用提供安全可靠和比较完善的解决方案,适合于当前工业,企业对自动化的需要。
摘要随着DSP技术的发展,DSP的应用范围越来越广,并且伴随着数字化的发展,对电机的控制的精度要求越来越高,DSP数字化处理能力也得到了质的飞跃。
所以学会应用DSP 时非常重要的。
本文详细讨论了无刷直流伺服电机,并推述星形接法的数学模型,并设计了数字控制无刷直流伺服电机总体方案,本文采用PID控制方法来控制电机,详细介绍了PID控制算法。
对DSP种类进行了简单的介绍,并选择以TMS320F2812为基准构建硬件平台,设计了DSP供电电源设计,驱动电路的设计,PWM光电耦合隔离电路的设计,电流的采样电路的设计,对DSP进行保护电路的保护电路的设计等。
在CCS环境下,对程序进行编辑,编写PID控制算法程序,对系统的初始化,编码器模块初始化,捕捉模块的初始化,SCI模块的初始化,以及对数字滤波进行编程。
关键词:DSP;CCS;PWM;无刷直流伺服电机AbstractWith the development of DSP technology, DSP application scope is more and more wide. With the development of digital control is higher and higher, The ability of digital handle has own a qualitative leap.So learn to apply DSP is very important.This paper discusses the brushless DC servo motor in detail .The paper describes the mathematical model of the star connection. I designed the general planning of digital control the brushless DC servo motor, this paper adopts the PID control method to control the motor and introduces the PID control in detail.First the article introduces the DSP types simply and select the hardware platform what is based on TMS320F2812 .I designed the DSP power supply. I designed the drive circuit and the PWM photoelectric coupling isolation circuit.I also designed the sampling circuit and the current of protection .At last I designed the protection circuit.In the CCS environment, I edited the program and written in PID control algorithm.I also completed the initialization of system,the initialization of encoder module , the initialization of capture module ,the initialization of SCI module , and programming of the digital filter.Keywords: DSP; CCS; PWM; brushless DC servo motor目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 本课题的研究内容和意义 (1)1.2 国内外的发展概况 (1)1.3 本课题应达到的要求 (2)2 电机的选择及其结构 (3)2.1 步进电机 (3)2.3 选择电机 (5)2.4 本章小结 (5)3 无刷直流电机的工作原理及数学模型 (6)3.1 无刷直流电动机的结构 (6)3.2 无刷直流伺服电动机的位置检测装置 (6)3.2.1 霍尔传感器 (7)3.2.2 定子绕组连接方式 (7)3.2.3 开关管控制方法 (9)3.3 无刷直流电机的暂态数学模型 (10)3.4 本章小结 (11)4 控制方案的总体设计 (12)4.1 控制方案的框图简介 (12)4.2 无刷直流伺服电动机实现控制的方法 (12)4.2.1 数字PID控制算法 (13)4.2.2 数字控制器设计的方法 (14)4.2.3 工程设计调节器的步骤 (14)4.3 PWM信号产生技术 (14)4.4 编码器 (15)4.5 电机相电流检测技术 (17)4.6 本章小结 (17)5 DSP的选择及相应的硬件设计 (17)5.1 DSP芯片TMS320F2812的特点 (18)5.2 控制硬件的设计 (18)5.3 DSP外围电路的设计 (19)5.3.1 电源的设计 (19)5.3.2 DSP的晶体振荡器接口电路 (19)5.3.3 时钟电路的设计 (20)5.3.4 JTAG电路的设计 (20)5.3.5 异步串行接口(SCI)硬件的设计 (21)5.3.6 CAN总线接口硬件设计 (22)5.4 功率驱动逆变电路的设计 (22)5.4.1 IR2130芯片具有以下一些特点 (22)5.4.2 IR2130结构原理图 (23)5.5 电机驱动的设计 (24)5.5.1 自举电容的选择和计算 (25)5.5.2 PWM驱动信号隔离电路 (25)5.6 霍尔传感器信号电路 (27)5.7 正交编码脉冲信号电路 (28)5.8 控制器保护电路设计 (28)5.9 本章小结 (30)6 控制系统的设计 (31)6.1 控制系统设计的基本原则 (31)6.2 软件的设计 (31)6.3 DSP集成开发环境CCS (31)6.4 主程序的设计 (32)6.4.1 系统初始化模块 (37)6.4.2 事件管理器模块 (38)6.4.3 捕捉模块(cap) (39)6.4.4 QEP正交编码器脉冲电路 (40)6.4.5 ADC模数转换模块 (41)6.4.6 SCI模块 (42)6.4.7 PID算法流程图如所示 (44)6.4.8 电流采样数字滤波 (45)6.5 本章小结 (46)7 结论与展望 (47)7.1 结论 (47)7.2不足之处及未来展望 (47)致谢 (47)参考文献 (48)1 绪论1.1 本课题的研究内容和意义随着科学技术的不断进步,现代机电系统的运动状态越来越复杂,系统控制的要求也越来越高。
毕业设计(论文)—基于plc的步进电机控制系统设计基于PLC步进电机控制系统摘要:随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是将电脉冲信号变换成机械角位移的一种装置,每个脉冲使转轴步进一个步距角增量,输出角位移与输入脉冲数成正比,转速与输入脉冲成正比,转速与输入脉冲频率成正比。
步进电机的控制方式简单,属于开环控制,且无累积定位误差,有较高的定位精度,而PLC作为一种工业控制微机,是实现电机一体化的有力工具,因此基于PLC的步进电机控制技术已广泛用于数字定位控制中。
本控制系统的设计,由硬件设计和软件设计两部分组成。
其中,硬件设计主要包括步进电机的工作原理、步进电机的驱动电路设计、PLC的输入输出特性、PLC的外围电路设计以及PLC与步进电机的连接与匹配等问题的实现。
软件设计包括主程序以及各个模块的控制程序,最终实现对步进电机转动方向及转动速度的控制。
本系统具有智能性、实用性及可靠性的特点。
关键词:步进电机、PLC、转速控制、方向控制Stepping motor control system based on PLC Abstract:With the development of microelectronics and computer technology, the stepper motor is increasing demanded, which is widely used in printers, electric toys and other consumer products, and CNC machine tools, industrial robots, medical equipment and other electrical machinery products, and is applied in the national economy in various fields. Researching of stepper motor control system to improve the control accuracy and response speed, energy conservation is so important.Stepper motor is a device which will transform electrical pulses into mechanical angular displacement so that Shaft of each pulse to a step angle stepping increment, SO output angular displacement is proportional to the input pulses, speed is proportional to the input pulse speed and speed is proportional to input pulse frequency. Stepper motor control is simple, is open-loop control, and no accumulation of positioning error, a high positioning accuracy,and the PLC as an industrial control computer, is a powerful tool for the integration of the motor, Therefore, the stepper motor control based on PLC technology has been widely used for digital positioning control.The control system consists of hardware and software design of two parts. Among them, the hardware design includes the working principle of stepper motor, stepper motor drive circuit design, PLC input and output characteristics, PLC and PLC external circuit connection with the stepper motor and matching Problem. Software design, including the main program and each module of the control program, ultimately realizes on the stepper motor rotation direction and rotation speed control This system has the intelligence, practicality and reliability features.Keywords: Stepper motor, PLC, speed control, direction control目录1、绪论 (1)1.2问题的提出 (3)1.3设计目的及系统功能 (4)2、PLC控制步进电机系统简介 (5)2.1PLC控制系统 (5)2.1.1 PLC概述 (5)2.1.2 PLC系统的其它设备 (9)2.1.3 PLC的通信联网 (9)2.1.4 PLC控制系统的设计基本原则 (9)2.1.5 PLC软件系统及常用编程语言 (10)2.1.6 PLC的特点 (10)2.1.7 PLC的应用领域 (12)2.1.8 PLC未来展望 (13)2.2步进电机 (13)2.2.1 步进电机概述 (13)2.2.2 步进电机的特性 (14)2.2.3 与直流电机的比较 (14)2.2.4 步进电机的种类 (17)2.2.5 反应式步进电机的控制 (17)2.3本设计所用步进电机 (21)3、硬件电路设计 (23)3.1硬件设计思路 (23)3.2总体设计框图 (23)3.3外围电路设计及分析 (24)3.3.1 键盘控制电路 (24)3.3.2步进电动机驱动电路 (26)2.6.3 LED数码显示电路 (31)3.4步进电机控制系统电路图 (34)4、软件设计 (36)4.1可编程控制器软件设计原理 (36)4.1.1可编程序控制器的工作原理 (36)4.1.2 扫描周期 (37)4.2 PLC的选型 (38)4.2.1 输入输出(I/O)点数的估算 (38)4.2.2 存储器容量的估算 (38)4.2.3 控制功能的选择 (38)4.2.4 机型的选择 (40)4.3FX可编程序控制器简介 (42)2N4.4PLC控制程序设计 (42)4.4.1 PLC控制系统的设计基本原则 (42)4.4.2 PLC编程步骤 (42)4.4.3 PLC提供的编程语言 (42)4.5.1启动停止控制环节 (45)4.5.2 PLC实用驱动电源控制环节 (45)结论 (50)致谢 (51)参考文献 (52)附录 (53)1、绪论1.1技术概述在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
作业名称:PLC控制电动机正反转可编程控制器(1)期末大作业得分:任课教师:班级:姓名:学号:2011年12月摘要三相异步电动机一般采用降压起动、能耗制动.针对传统的继电器一接触器控制的降压起动、能耗制动方法存在的不足,将OMRON公司的CPM2*型可编程序控制器(PLC)与接触器相结合,用于三相异步电动机的Y一△降压起动、能耗制动控制,改进后的方法克服了传统方法手工操作复杂且不够可靠的缺点,控制简单易行。
关键词:三相异步电动机;PLC控制系统;Abstructthe Three—phase asynchronous motor step—down start,generally USES the braking energy. In traditional relay a contact device control step-down start braking energy, the shortcomings of the methods,the company will CPM2 * type OMRON PLC and contactor, combining for three—phase asynchronous motor step—down start a train of Y,braking energy control, the improved method can overcome the disadvantage of traditional method manual operation complex and not reliable enough shortcomings,simple and easy to control.Key words: the three—phase asynchronous motor; PLC control system引言设计三相异步电动机一般采用降压起动、能耗制动.针对传统的继电器一接触器控制的降压起动、能耗制动方法存在的不足,将OMRON公司的CPM2*型可编程序控制器(PLC)与接触器相结合,用于三相异步电动机的Y一△降压起动、能耗制动控制,改进后的方法克服了传统方法手工操作复杂且不够可靠的缺点,控制简单易行。
基于PLC的步进电机的控制摘要:小型PLC在编程,I/O扩展,通讯接口,开关量和模拟量的调节以及一些特殊功能模块如高速计数输入和脉冲输出的应用上已经基本满足用户的需求了。
但随着应用需求及关联产品技术性能的提升,PLC将继续得已完善和发展。
本文主要论述了步进电机的原理及驱动方法,并在S7-200 PLC的基础上,对步进电机进行控制。
本设计选用PLC控制两相混合式步进电机,在PLC编程的基础上用按钮开关控制步进电机的启动、正转、反转等基本功能。
关键词:S7-200 PLC 两相混合式步进电机PLC编程Control of stepping motor based on PLCAbstract: In the field of programming, I/O expansion, Communication interface, adjustments of switches and simulation and some special function modules such as the application of high speed pulse input and output, the PLC has already met demands of users. But the PLC will continue to improve and develop, as the development of application requirements and related technical performance.This article chiefly discusses the principle and driven approach of the stepping motor, and how to control it based on the S7-200 PLC. The article is about how the PLC controlling the two-phase hybrid stepping motor. With the switch button, it can function as: start,positive rotation,inversion.Key words: S7-200 PLC two-phase hybrid stepping motor PLC programming目录第一章绪论 (1)1.1 概述 (1)1.2 S7-200PLC国内外现状和发展趋势 (2)1.3 论文的主要研究工作 (3)第二章西门子 S7-200 PLC (4)2.1 PLC的产生 (4)2.2 PLC的特点 (4)2.2.1 编程方法简单易学 (4)2.2.2 硬件配套齐全,用户使用方便 (5)2.2.3 通用性强,适应性强 (5)2.2.4 可靠性高,抗干扰能力强 (5)2.2.5 系统的设计、安装、调试工作量少 (5)2.2.6 维修工作量小,维修方便 (5)2.2.7 体积小,能耗低 (5)2.3 PLC的系统构成 (6)2.3.1 主机 (6)2.3.2 I/O扩展机 (6)2.3.3 外部设备 (7)2.4高速脉冲输出功能 (7)2.4.1用于脉冲输出(Q0.0或Q0.1)的特殊存储器 (7)2.4.2 PTO的使用 (9)2.5 PLC的选择 (10)2.5.1 CPU224 (10)2.5.2 工作方式 (10)2.5.3 扫描周期 (11)2.5.4 性能简介及特点 (11)2.6 PLC技术在步进电机控制中的应用 (12)第三章步进电机 (14)3.1 步进电机的特点 (14)3.2 步进电机的基本参数 (15)3.3 步进电机的工作原理及分类 (15)3.3.1 步进电机的工作原理 (16)3.3.2 步进电机的分类 (16)3.3.3 步进电机在工业中的应用 (17)第四章S7-200 PLC控制步进电机设计 (18)4.1 步进电机的选择 (18)4.2 步进电机驱动电路设计 (19)4.2.1 驱动器的选择 (19)4.2.2 步进电机驱动技术 (19)4.2.3 驱动器参数设置 (22)4.3 PLC控制步进电机 (22)4.3.1接线实物图 (23)4.3.2 控制电机方向转动 (24)4.4 程序调试 (25)第五章论文总结 (28)参考文献 (29)致谢 (30)附录 (31)第一章绪论1.1 概述可编程控制器(简称PLC) 是一种数字运算操作的电子系统,是在20 世纪60 年代末面向工业环境由美国科学家首先研制成功的。
PLC控制三相异步电动机正反转设计毕业设计论文摘要:本文基于PLC控制技术,设计了一种三相异步电动机的正反转控制系统。
通过分析三相异步电动机的工作原理和控制方式,确定了系统的控制策略和硬件配置。
通过对PLC编程,实现了对电动机的正反转控制和过载保护功能。
实验结果表明,该系统可稳定、可靠地实现三相异步电动机的正反转控制,具有较好的应用前景。
关键词:PLC;三相异步电动机;正反转控制;过载保护1.引言三相异步电动机广泛应用于工业生产中,具有体积小、功率大、效率高等特点。
在实际应用过程中,正反转控制和过载保护是三相异步电动机控制系统中的重要功能,对于保证电机的正常运行和延长电机的使用寿命具有重要作用。
本文基于PLC技术,设计了一种三相异步电动机的正反转控制系统,旨在实现电动机的正反转控制和过载保护功能。
2.三相异步电动机的工作原理和控制方式三相异步电动机由定子和转子组成,在工作过程中,通过三相交流电源提供的电磁场与定子的电磁场产生转矩,从而驱动电动机的转子旋转。
三相异步电动机的控制方式主要包括定时控制和矢量控制两种。
定时控制是根据电动机运行的需要,通过调节电源的相位和频率实现对电动机的控制;矢量控制是基于电动机的数学模型和转子位置的反馈信息,通过控制电源的电压和频率,实现对电动机的精确调控。
3.设计方案基于PLC控制技术,本文设计了一种三相异步电动机的正反转控制系统。
系统由PLC控制器、三相交流电源、电动机和传感器组成。
通过PLC编程,实现了对电动机的正反转控制和过载保护功能。
具体的设计方案如下:3.1硬件配置系统的硬件配置包括PLC控制器、三相交流电源、电动机和传感器。
PLC控制器是系统的核心部件,负责电动机控制和过载保护的实现。
三相交流电源提供电动机的驱动能源。
电动机是执行器,根据PLC的控制信号,实现正反转和停止操作。
传感器用于检测电动机的工作状态和转速。
3.2PLC编程通过PLC编程,实现了对电动机的正反转控制和过载保护功能。
无刷直流电动机控制系统设计方案摘要无刷直流电动机是在有刷直流电动机的基础上发展起来的。
现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到普遍的关注。
自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用也因此而迅速增长。
本设计是把无刷直流电动机作为电动自行车控制系统的驱动电机,以PIC16F72单片机为控制电路,单片机采集比较电平及电机霍尔反馈信号,通过软件编程控制无刷直流电动机。
关键词无刷直流电动机单片机霍尔位置传感器AbstractBrushless DC motor in a brush DC motor developed on the basis of. At this stage, although exchanges of all kinds of DC motors and motor drive in the application of the dominant, but brushless DC motor is under common concern。
Since the 1990s,as people's living standards improve and modernize production, the development of office automation, household appliances, industrial robots and other equipment are increasingly tend to be high efficiency,small size and high intelligence, as the implementation of components An important component of the motor must have a high accuracy, speed, high efficiency, brushless DC motor and therefore the application is also growing rapidly.This design is the brushless DC motor as the electric bicycle motor—driven control system, PIC16F72 microcontroller for control circuit, SCM collection and comparison—level electrical signal Hall feedback, software programming through brushless DC motor control . Key words bldcm the single chip processor hall position sensor 摘要 (I)Abstract (II)第1章概述 (1)1。
电机正反转控制设计毕业设计(论⽂)题⽬:电机正反转控制设计系:专业班级:学⽣:指导教师:20XX年X⽉电机正反转控制设计摘要直流电动机是⼈类最早发明和应⽤的⼀种电机直流电动机是将直流电转换成机械能的⽽带动⽣产机械运转的电器设备。
与交流电动机相⽐,直流机因结构复杂、维护困难、价格较贵等缺点制约了它的发展,但是它具有良好的起动、制动性能,因此在速度调节要求较要、正反转和起动频繁或多个单元同步协调运转的⽣产机械上,仍⼴泛采⽤直流电动机拖动,在⼯业领域直流电动机仍占有⼀席之地。
本⽂介绍了基于H桥驱动的直流电机正反转控制系统,系统采⽤继电器搭建H桥驱动电路,驱动信号由红外遥控接收器提供。
关键词:电机正反转继电器H桥⽬录第1章绪论 (3)1.1选题⽬的与意义 (3)1.1.1国外研究现状 (3)1.1.2 直流电动机控制的发展历史 (3)1.1.3直流电动机控制的研究现状 (5)1.2 本课题主要研究容及意义 (5)第⼆章直流电机的⼯作原理 (6)2.1 直流电动机的结构 (8)2.1.1 定⼦ (8)2.1.2 转⼦ (9)2.2 电机正反转控制电路原理 (9)第三章直流电机正反转电路设计 (12)3.1 继电器选型 (12)3.2 继电器H桥驱动电路 (14)第1章绪论1.1选题⽬的与意义在电⽓时代的今天,电动机⼀直在现代化的⽣产和⽣活中起着⼗分重要的作⽤。
⽆论是在⼯农业⽣产、交通运输、国防、航空航天、医疗卫⽣、商务与办公设备中,还是在⽇常⽣活中的家⽤电器中,都⼤量地使⽤着各种各样的电动机。
以前电动机⼤多使⽤继电器实现双向转动以及由模拟电路组成的控制柜进⾏控制,现在普遍使⽤单⽚机控制H桥驱动电路实现电机正反转取代模拟电路作为电机控制器。
当前电机控制器的发展⽅向越来越趋于多样化和复杂化,现有的专⽤集成电路未必能满⾜苛刻的新产品开发要求,为此可考虑开发电机的新型单⽚机控制器。
1.1.1国外研究现状电动机的控制技术的发展得⼒于微电⼦技术、电⼒电⼦技术、传感器技术、永磁材料技术、电动控制技术、微机应⽤技术的最新发展成果。
当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流驱动控制作为电气传动的主流在现代化生产中起着主要作用。
长期以来,直流电机因其转速调节比较灵活,方法简单,易于大范围平滑调速,控制性能好等特点,一直在传动领域占有统治地位。
它广泛应用于数控机床、工业机器人等工厂化设备中。
随着现代化生产规模的不断扩大,各个行业对直流电机的需求愈益增大,并对其性能提出了更高的要求。
为此,研究并制造高性能、高可靠性的直流电机控制系统有着十分重要的现实意义。
本设计通过PWM方式控制直流电机调速,采用了C语言来控制单片机产生PWM 信号,将信号输入L298N芯片驱动电机,通过改变输入电压的占空比,从而实现直流电机速度的控制。
论文针对所设计的控制方案对控制系统的软、硬件设计作了详细论述。
硬件部分先作了整体设计,然后介绍了以AT89S51单片机为核心的硬件构成,对调速电路、检测电路、显示电路等作了详细阐述;软件部分采用模块化设计思想,论述了软件的设计思想和方法;实现了对直流电机的快速启动和停止,电机转速的设置、调控和显示功能。
利用AT89S51芯片进行低成本直流电动机控制系统的设计,能够简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。
关键词:单片机;PWM;直流电机;转速控制1 / 44Nowadays, automatic control system has been widely used and greatly developed in all walks of life. As the dominant part of electric drive, direct current (DC) control plays an important role in modern production. For a long time, DC motors hold a dominant position in transmission field with the characteristics of more flexible and simple speed adjustment, smoothly timing in a large scale, and good control performance. DC motors are widely used in factory equipment of numerical control machine, industrial robot, etc. With the constant expansion of modern production, the demand for DC motors is increased and a higher request is put forward. Thus, it is of great practical significance to research and make a high performance and reliability DC motor control system.The design controls DC motors speed regulation through the method of PWM, uses C language to control the microcontroller and then generates PWM signals. It is to input the signals into L298N drive chip, by using the control method of changing the duty ratio of the input voltage, and then make the DC motor speed control come true.The paper makes a detailed discussion on software and hardware of controlling system on the basis of the designed control system. After a dissertation on the whole design of, hardware structure with AT89S51 microcontroller as the core is introduced, and then speed control circuit, detection circuit and display circuit are expounded. In the part of software, module idea is adopted, the design idea and method is discussed and setting, start, stop, controlling and display functions of the DC electrical motor rotation parameters are achieved. The design of using AT89S51 chip to do low cost DC electrical motor control system can simplify system structure, reduce system cost, enhance system performance and meet more application needs.Key words:microcontroller; PWM; DC electrical motor; speed control1 / 44目录引言 (1)1 总体方案设计 (1)1.1任务要求 (1)1.2 方案论证 (1)1.2.1电机调速控制模块的选择方案 (1)1.2.2电机测速模块的选择方案 (2)1.2.3电机转速显示模块的选择方案 (2)1.2.4控制器的选择方案 (3)1.3 总体方案选择 (3)2 硬件电路的设计 (4)2.1 AT89S51单片机最小系统电路 (4)2.1.1AT89S51单片机芯片简介 (4)2.1.2AT89S51的管脚排列 (4)2.1.3晶振电路 (5)2.1.4复位电路 (5)2.2 转速检测电路 (6)2.2.1霍尔元件3144简介 (7)2.2.2霍尔元件的使用注意事项 (7)2.2.3霍尔元件3144的电路设计 (7)2.3 数码管显示电路 (8)2.3.1数码管简介 (8)2 / 442.3.3数码管显示电路设计 (9)2.4 单片机ISP下载电路 (9)2.5 电机驱动电路 (10)2.5.1L298N芯片简介 (10)2.5.2驱动电路设计 (11)2.5.3保护电路设计 (12)3 电机调速设计 (12)3.1 PWM控制技术 (12)3.1.1PWM简介 (12)3.1.2PWM优点 (13)3.2 电机调速控制 (13)3.2.1调速原理 (13)3.2.2实现方法 (14)4 系统软件设计 (14)4.1 程序设计流程图 (14)4.2 单片机片内定时计数器介绍 (15)4.2.1定时计数器的结构 (15)4.2.2定时计数器的工作寄存器TMOD和TCON (15)4.3 片内中断系统简介 (16)4.3.1中断的概念 (16)4.3.2中断控制寄存器IE、IP (17)4.4 数码管显示程序的设计 (18)3 / 444.4.2转速显示实时更新的程序设计 (19)4.5 直流电机启动、停止程序的设计 (20)4.6 电机自动调速程序设计 (21)5 系统调试与数据测试 (23)5.1 系统调试 (23)5.1.1元件焊接与整板测试 (23)5.1.2系统软件调试 (24)5.2 系统实验 (24)5.2.1测试方法 (24)5.2.2测试结果分析 (24)6 结论 (25)谢辞 (26)参考文献 (27)附录 (28)附录一:系统原理图 (28)附录二:系统PCB (28)附录三:程序清单 (29)4 / 445 / 44引言直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
PLC控制电机正反转(毕业论文)继续教育学院毕业设计(论文)题目:星三启动可逆运行电动机的PLC控制系统的设计院、系(站):渭南工业学校函授站学科专业:机电一体化技术学生:韦坤学号:1070212200033指导老师:刘碧波2012年12月摘要可编程控制器(PLC)是以微处理器为核心,将自动控制技术、计算机技术和通信技术融为一体而发展起来的崭新的工业自动控制装置。
目前PLC已基本替代了传统的继电器控制而广泛应用于工业控制的各个领域,PLC已跃居工业自动化三大支柱的首位。
生产机械往往要求运动部件可以实现正反两个方向的起动,这就要求拖动电动机能作正、反向旋转。
由电机原理可知,改变电动机三相电源的相序,就能改变电动机的转向。
按下正转启动按钮SB1,电动机正转运行,且KM1,KMY接通。
2s后KMY断开,KM 接通,即完成正转启动。
按下停止按钮SB2,电动机停止运行。
按下反转启动按钮SB3,电动机反转运行,且KM2,KMY接通。
2s后KMY断开,KM 接通,即完成反转启动。
目录第一章PLC概述 (1)1.1 PLC的产生 (1)1.2 PLC的定义 (1)1.3 PLC的特点及应用 (2)1.4 PLC的基本结构 (4)第二章三相异步电动机控制设计 (7)2.1 电动机可逆运行控制电路 (7)2.2 启动时就星型接法30秒后转为三角形运行直到停止反之亦然 (9)2.3. 三相异步电动机正反转PLC控制的梯形图、指令表 (12)2.4 三相异步电动机正反转PLC控制的工作原理 (13)2.5 指令的介绍 (14)结论 (16)致谢 (17)参考文献 (18)第一章PLC概述1.1 PLC的产生1969年,美国数字设备公司(DEC)研制出了世界上第一台可编程序控制器,并应用于通用汽车公司的生产线上。
当时叫可编程逻辑控制器PLC(Programmable Logic Controller),目的是用来取代继电器,以执行逻辑判断、计时、计数等顺序控制功能。
《控制电机》论文学生姓名:张俊任课教师:王贤立学生学号:130544132专业:电气工程物理与电子信息学院2016 年 6 月控制电机综述控制电机作为微特电机的主要分支,其结构和原理有别于普通电机,并且种类众多。
本书的编写始终贯彻以控制电机基本结构、工作原理和运行特性为主线的指导思想,同时兼顾控制电机的合理选择和实际应用。
在控制电机种类方面选择了比较典型的旋转变压器、自整角机、测速发电机、伺服电动机、步进电动机和各类微特同步电动机,对新结构和新原理的控制电机也作了一定的介绍。
全书共分为9章,包括伺服电动机、测速发电机、自整角机、旋转变压器和步进电动机等。
1、控制电机的分类控制电机根据在自动控制系统中的作用,分为以下几类:(1)执行元件(功率元件)●直流伺服电动机●交流伺服电动机●步进电动机●无刷直流电动机作用是将电信号转换成轴上的角位移或角速度以及直线位移和线速度,并带动控制对象运动。
(2)测量元件(信号元件)●自整角机●交、直流测速发电机●旋转变压器作用是测量机械转角、转角差和转速,在控制系统中作为敏感元件和校正元件。
执行元件主要包括交、直流伺服电动机、步进电机等,它的任务是将输入的电信号转换成轴上的角位移或角速度的变化;测量元件主要包括交、直流测速发电机,自整角机等,它可以用来测量机械转角、转较差和转速等。
2、各类控制电机的简介2.1旋转变压器旋转变压器(resolver)是一种电磁式传感器,又称同步分解器。
它是一种测量角度用的小型交流电动机,用来测量旋转物体的转轴角位移和角速度,由锭子和转子组成。
旋转变压器在同步随动系统及数字随动系统中可用于传递转角或电信号;在解算装置中可作为函数的解算之用,故也称为解算器。
旋转变压器一般有两极绕组和四极绕组两种结构形式。
两极绕组旋转变压器的锭子和转子各有一对磁极,四极绕组则各有两队磁极,主要用于高精度的检测系统。
除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。
按输出电压与转子转角间的函数关系,主要分三大类旋转变压器:1、正-余弦旋转变压器,其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2、线性旋转变压器,其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种。
3、比例式旋转变压器,其输出电压与转角成比例关系。
旋转变压器是一种精密角度、位置、速度检测装置,适用于所有使用旋转编码器的场合,特别是高温、严寒、潮湿、高速、高震动等旋转编码器无法正常工作的场合。
由于旋转变压器以上特点,可完全替代光电编码器,被广泛应用在伺服控制系统、机器人系统、机械工具、汽车、电力、冶金、纺织、印刷、航空航天、船舶、兵器、电子、冶金、矿山、油田、水利、化工、轻工、建筑等领域的角度、位置检测系统中。
也可用于坐标变换、三角运算和角度数据传输、作为两相移相器用在角度--数字转换装置中。
2.2自整角机利用自整步特性将转角变为交流电压或由转角变为转角的感应式微型电机,在伺服系统中被用作测量角度的位移传感器。
自整角机还可用以实现角度信号的远距离传输、变换、接收和指示。
自整角机按用途分为力矩式和控制式(变压器式)两种。
力矩式自整角机大多数采用两极凸极式结构,只在频率较高、尺寸较大时才采用隐极式结构。
定、转子铁芯上分别装嵌单相激磁绕组和三相整步绕组。
三相整步绕组为分布式星形接线,各相轴心线在空间相差120°。
转子绕组通过滑环和电刷引出接线的为接触式自整角机;通过电磁耦合方法引出接线的为无接触式自整角机,后者无接触摩擦和无线电干扰,但结构复杂,性能指标和利用率低。
控制式自整角接收机(自整角变压器)多采用隐极式结构,并在转子上装设高精度的正弦绕组。
两台控制式自整角机与力矩式自整角机相似可组成角度测量系统,也可以有差动工作方式。
2.3测速发电机测速发电机是一种测量转速的微型发电机,他把输入的机械转速变换为电压信号输出,并要求输出的电压信号与转速成正比。
测速发电机分为直流测速发电机和交流测速发电机两大类。
直流测速发电机是一种测速元件,它把转速信号转换成直流电压信号输出。
直流测速发电机广泛地应用于自动控制、测量技术和计算机技术等装置中。
直流测速发电机可分为电磁式和永磁式两种。
电磁式励磁绕组接成他励,永磁式采用矫顽力高的磁钢制成磁极。
交流测速发电机有空心杯转子异步测速发电机、笼式转子异步测速发电机和同步测速发电机3种。
测速发电机广泛用于各种速度或位置控制系统。
在自动控制系统中作为检测速度的元件,以调节电动机转速或通过反馈来提高系统稳定性和精度;在解算装置中可作为微分、积分元件,也可作为加速或延迟信号用或用来测量各种运动机械在摆动或转动以及直线运动时的速度。
2.4伺服电动机伺服电动机是用作自动控制装置中执行元件的微特电机。
又称执行电动机。
其功能是将电信号转换成转轴的角位移或角速度。
伺服电动机分交、直流两类。
交流伺服电动机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格等特点。
直流伺服电动机具有良好的线性调节特性及快速的时间响应。
直流伺服电机的特性较交流伺服电机硬。
通常应用于功率稍大的系统中,如随动系统中的位置控制等。
交流伺服电机的输出功率一般为0.1-100 W,电源频率分50Hz、400Hz 等多种。
它的应用很广泛,如用在各种自动控制、自动记录等系统中。
2.5微型同步电机微型同步电机的额定功率从零点几瓦到数百瓦,由于同步电动机的转速在一定的输出功率范围内是不随负载变化的这种恒速特性使得微型同步电机在诸如电报传真机、磁带录音机和各种精密的计时或是记录装置中得到了广泛的应用。
微型同步电机按定子绕组所接电源相数不同,可分为三相和单相同步电机两大类。
三相微型同步电机的定子结构与普通三相同步电机相同。
在定子铁芯槽内嵌放有彼此相差120°电度角的三相绕组。
工作时,由三相电源供电。
单相微型同步电机的定子结构与单相异步电机相同,又分为两相起动式和罩极式两种。
工作时有单相电源供电。
2.6无刷直流电动机一种用电子换向的小功率直流电动机。
又称无换向器电动机、无整流子直流电动机。
它是用半导体逆变器取代一般直流电动机中的机械换向器,构成没有换向器的直流电动机。
这种电机结构简单,运行可靠,没有火花,电磁噪声低,广泛应用于现代生产设备、仪器仪表、计算机外围设备和高级家用电器。
无刷直流电动机由同步电动机和驱动器组成,是一种典型的机电一体化产品。
同步电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。
而转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。
驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
2.7步进电动机步进电动机把电脉冲信号变换成角位移以控制转子转动的微特电机。
在自动控制装置中作为执行元件。
每输入一个脉冲信号,步进电动机前进一步,故又称脉冲电动机。
步进电动机分为机电式及磁电式两种基本类型。
机电式步进电动机由铁心、线圈、齿轮机构等组成。
螺线管线圈通电时将产生磁力,推动其铁心心子运动,通过齿轮机构使输出轴转动一角度,通过抗旋转齿轮使输出转轴保持在新的工作位置;线圈再通电,转轴又转动一角度,依次进行步进运动。
磁电式步进电动机主要有永磁式、反应式和永磁感应子式3种形式。
步进电机主要用于数字控制系统中,精度高,运行可靠。
如采用位置检测和速度反馈,亦可实现闭环控制。
步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表等之中,另外在工业自动化生产线、印刷设备等中亦有应用。
2.8直线电动机直线电动机也称线性电机,线性马达,直线马达,推杆马达。
最常用的直线电机类型是平板式和U 型槽式,和管式。
线圈的典型组成是三相,有霍尔元件实现无刷换相。
直线电机是一种将电能直接转换成直线运动机械能,而不需要任何中间转换机构的传动装置。
它可以看成是一台旋转电机按径向剖开,并展成平面而成。
直线电机主要应用于三个方面:一是应用于自动控制系统,这类应用场合比较多;其次是作为长期连续运行的驱动电机;三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。
3.自整角机的基本结构自整角机的结构和一般旋转电机相似,主要由定子和转子两大部分组成。
定子铁心的内圆和转子铁心的外圆之间存在有很小的气隙。
定子和转子也分别有各自的电磁部分和机械部分。
自整角机的结构简图如图 1 所示。
定子铁心是由冲有若干槽数的簿硅钢片叠压而成,图2表示定子铁心冲片。
图表示转子(有隐极和凸极两种)剖视图。
定子铁心槽内布置有三相对称绕组,转子铁心上布置有单相绕组(差动式自整角机为三相绕组)。
图3自整角机结构简图图 2 定子铁心冲片图3 自整角机转子直流测速发电机应用案例有关直流测速发电机特点、应用、控制的研究摘要:直流测速发电机是一种测速元件,它把转速信号转换成直流电压信号输出。
直流测速发电机广泛地应用于自动控制、测量技术和计算机技术等装置中。
直流测速发电机可分为电磁式和永磁式两种。
电磁式励磁绕组接成他励,永磁式采用矫顽力高的磁钢制成磁极。
由于永磁式不需另加励磁电源,也不因励磁绕组温度变化而影响输出电压,故应用较广。
关键词:直流测速发电机特点应用控制研究0引言:直流测速发电机是一种微型直流发电机,实质是一种转速测量传感器,将机械速度转变为电压信号,在自动控制系统和计算装置中作为检测元件、校正元件等。
在恒速控制系统中,测量旋转装置的转速,向控制电路提供与转速成正比的信号电压作为反馈信号,以调节速度。
工作原理如图。
当被测装置带动发电机电枢旋转,电枢产生电动势Ea,其大小为Ea=KEφn发电机的输出电压为:U=Ea-RaIa=KEφn-RaIa又:Ia=U/RL故:U=(KEφ/1+ (Ra/RL))n可见,当励磁电压Uf保持恒定时,φ亦恒定,若Ra、RL不变,输出电压U的大小与转速n成正比(U=k n)。
对于不同的负载电阻RL,测速发电机输出特性的斜率有所不同,如图2。
由于电机电枢反应,使输出电压与转速有一定的线性误差。
RL越小、n越大,误差越大。
因此,应使RL和n的大小符合直流测速发电机的技术要求,以确保控制系统的精度。
直流测速发电机的输出特性图为直流测速发电机在恒速控制系统中的应用图。
其中,直流伺服电动机S M拖动机械负载,要求负载转矩变动时,系统转速不变。
SM同轴连接直流测速发电机TG,将TG输出电压送入系统的输入端作为反馈电压Uf,且Uf与给定电压恒速控制系统原理图1直流测速发电机特点:自动控制系统对其元件的要求,主要是精确度高、灵敏度高、可靠性好等。