PECVD_CT设备常见故障手册
- 格式:doc
- 大小:73.50 KB
- 文档页数:7

1.目的确保管式PECVD 处于良好的运行状态。
2.使用范围适用于所有Centrotherm 管式PECVD 。
3.生产操作 3.1开机3.1.1开总电源。
用手扳住电柜外部的红色按钮,旋转90度。
从“OFF ”位置拔向“ON ”位置,机器上指示灯亮VAT 控制器灯亮,可确定总电源已开启。
注意,当机器出现故障,按下急停键后,首先松开急停键,然后将开关逆时针转到Reset 的位置,然后再顺时针转到“ON ”的位置。
机器上指示灯亮VAT 控制器灯亮,可确定总电源已开启。
3.1.2开真空泵。
(1) 合上真空泵电源,按下reset 按钮,start 按钮亮,然后按下start 按钮,pre run 按钮亮,此时真空泵启动,当真空泵运行到正常转速时,vacuum mode 灯亮,此时真空泵完全启动。
3.1.3 检查外围条件。
N2的压力>2.5Kg/2cm ,SiH4的压力约为1.5 Kg/2cm ,NH3的压力约为1.5Kg/2cm ,CDA 的压力为5~7 Kg/2cm 。
炉门处的冷却水流量计>4SLM ,设备炉体区顶部的冷却水流量计>4SLM ,主冷却器>8SLM ,设备尾部的冷却水流量计>4SLM ,射频电源的总冷却水流量计>18SLM.3.2界面操作(1) 启动CMI 程序。
开总电源后计算机自动启动。
输入密码“6065”后自动进入Windows 桌面。
用鼠标左键双击“CMI ”图标,启动CMI 。
(2) 进入CMI 画面,检查设备状态:SLS=UP (舟处于上位) ,DOOR=CLOSED (门处于关紧状态) ,PLC=OK ,LIFT=READY (机械壁必须在零位) ,TUBE=READY (炉管处于准备好状态)SET/ACT POSITION=0(桨处于原点位) ,PROCFLAG=OK (程序标志位OK 状态)3.2.1选择工艺程序,生产。
(1) 插片。
用小车承载石墨舟,在插片房中插满硅片。
版本Re v.编写人Preparedby编写日期PreparedDate审核人Checkedby审核日期CheckedDate批准人Approvedby批准日期ApprovedDate1.目的:规范操作,为生产车间操作规范化提供依据2.范围:适用于PECVD设备使用工序.3. 职责:3.1.1负责PECVD设备的开机和关机程序。
3.1.2负责PECVD设备的日常维护。
3.1.3负责发现作业过程中其设备出现问题怎样解决。
4. 名词定义:无5. 设备使用程序:5.1 使用环境及工作条件5.1.1 环境温度<25℃5.1.2 相对湿度<75%5.1.3 净化等级1000级~10000级5.1.4 电源三相五线,380V/50HZ,≤50KW/管5.1.5 供水水压0.2MPa~0.4MPa5.1.6 供气SiH4NH3N2O2CF4五路气体,气压0.2MPa~0.45MPa5.1.7 配排风排毒装置5.2对环境及能源的影响PECVD设备本身对环境及能源没有任何影响,若用户采用不同的工艺,使用不同的气体可能对环境稍有影响,但由于用气量非常小,不会造成任何危害。
5.3安全版本Re v.编写人Preparedby编写日期PreparedDate审核人Checkedby审核日期CheckedDate批准人Approvedby批准日期ApprovedDate本设备在设计过程中已充分地考虑了安全因素,只要用户不违反操作规程绝不会出现安全事故。
唯一可能在工艺过程中使用易燃气体SiH4,气体源应远离操作台,工作场地禁止使用明火,工作人员禁止吸烟。
所有气路管道不允许有任何泄漏点。
5.4使用前的准备5.4.1 接通整机电源;5.4.2 接通本机水路;5.4.3 接通各路气路。
若设备停止工作时,应该将反应管内部抽成真空,停止加热,其目的是为了防止真空管路过热,会使压力传感器严重零漂,影响压力测量。
待温度低于250℃再停水,并关断NH3、SiH4等气体的手动阀。
PECVD的原理与故障分析摘要薄膜制备工艺在超大规模集成电路技术中有着非常广泛的应用,按照其成膜方法可分为两大类:物理气相沉积(PVD)和化学气相沉积(CVD)。
等离子增强型化学气相淀积(PECVD)是化学气相淀积的一种,其淀积温度低是它最突出的优点。
PECVD淀积的薄膜具有优良的电学性能、良好的衬底附着性以及极佳的台阶覆盖性,正由于这些优点使其在超大规模集成电路、光电器件、MEMS等领域具有广泛的应用。
本文简要介绍了PECVD工艺的种类、设备结构及其工艺原理,根据多年对设备维护的经验,介绍了等离子增强型化学气相淀积(PECVD)设备的基本结构,总结了这类设备的常见故障及解决措施。
1PECVD的种类1.1射频增强等离子体化学气相淀积(RF-PECVD)等离子体化学气相淀积是在低压化学气相淀积的同时,利用辉光放电等离子对过程施加影响,在衬底上制备出多晶薄膜。
这种方法是日本科尼卡公司在1994年提出的,其等离子体的产生方法多采用射频法,故称为RF-PECVD。
其射频电场采用两种不同的耦合方式,即电感耦合和电容耦合[1]。
1.2甚高频等离子体化学气相淀积(VHF-PECVD)采用RF-PECVD技术制备薄膜时,为了实现低温淀积,必须使用稀释的硅烷作为反应气体,因此淀积速度有限。
VHF-PECVD技术由于VHF激发的等离子体比常规的射频产生的等离子体电子温度更低、密度更大[2],因而能够大幅度提高薄膜的淀积速率,在实际应用中获得了更广泛的应用。
1.3介质层阻挡放电增强化学气相淀积(DBD-PECVD)DBD-PECVD是有绝缘介质插入放电空间的一种非平衡态气体放电(又称介质阻挡电晕放电或无声放电)。
这种放电方式兼有辉光放电的大空间均匀放电和电晕放电的高气压运行特点,正逐渐用于制备硅薄膜中[3]。
1.4微波电子回旋共振等离子体增强化学气相淀积(MWECR-PECVD)MWECR-PECVD是利用电子在微波和磁场中的回旋共振效应,在真空条件下形成高活性和高密度的等离子体进行气相化学反应。
PECVD:等离子增强化学气相淀积,英文全称为Plasma Enhance Chemical Vapour Deposition目录:一、镀膜原理二、管式PECVD镀膜的各工艺参数具体控制范围三、PECVD膜的作用、简述膜的特性。
四、常见的异常情况管P部分平板部分一、镀膜原理所谓等离子体,是指气体在一定条件下受到高能激发,发生电离,部分外层电子脱离原子核,形成电子、正离子和中性粒子混合组成的一种形态,这种形态就称为等离子态。
等离子体在化学气相沉积中有如下作用:(1).将反应物中的气体分子激活成活性离子,降低反应所需的温度;(2).加速反应物在基片表面的扩散作用(表面迁移作用),提高成膜速度;(3).对于基体表面及膜层表面具有溅射清洗作用,溅射掉那些结合不牢的粒子,从而加强了形成的薄膜和基片的附着力;(4).由于反应物中的原子、分子、离子和电子之间的碰撞、散射作用,使形成的薄膜厚度均匀间接等离子:等离子没有直接和硅片接触(Roth&Rau, 岛津)直接等离子:等离子直接接触硅片( Centrotherm )间接等离子直接等离子等离子不直接接触硅片等离子直接接触硅片,会对硅片表面造成轰击等离子高能量密度等离子低能量密度高效的间接激活方式point-of-use的激活方式downstream丧失有活性的反应物downstream短,反应物可以被激活高频限制沉积区域低频可以满足较大的沉积区域存在混合和沉积的均匀性问题混合和沉积降至最低的不均匀硅片不会影响等离子的控制硅片会影响等离子的控制,会造成色差等影响没有等离子加热等离子加热硅片,钝化效果会加强只会由于机器本身产生色差片除了机器本身,还有其他原因产生色差片原理:管式PECVD的原理就是通过脉冲射频激发受热的稀薄气体进行辉光放电形成等离子体,通过两片相对应的石墨片加相反的交变电压使等离子在极板间加速撞击气体,运动到硅片表面完成镀膜过程。
影响镀膜效果主要的机器本身工艺参数有:(1).镀膜工艺时候真空压力(2).镀膜工艺温度(3).镀膜工艺气体流量比(4).镀膜工艺和总气体流量(5).射频功率以及脉冲开关时间(6).等离子体的沉积方向由于管式PECVD是直接镀膜过程,镀膜效果会受到很多外界因素的干扰,并且这些干扰对膜的质量产生很严重的影响;(1).石墨舟本身的使用状况(2).硅片表面形貌的差异二、管式PECVD镀膜的各工艺参数具体控制范围1.镀膜工艺时候真空压力真空压力对镀膜速率而言很重要,是成膜较为关键的因素,目前在尚德镀膜工艺保持稳定的情况下,管式PECVD的真空压力为;156多晶:1700 mTorr ,大约相当于226.65 Pa。
目录1.目的: (3)2.范围: (3)3.职责: (3)4.设备概况: (3)5.部分故障参考: (4)6.相关操作 (8)7.维修保养 (12)8.设备完好标准 (14)9.安全注意: (15)1.目的:指导centrotherm 管式PECVD镀膜机的维修保养工作,使设备长期处于良好状态,保障设备正常运行2.范围:适用于二部centrotherm 管式PECVD镀膜机3.职责:1)负责管式PECVD所有生产性设备资产的完好性,负责制定日常运行维护、维修及检修计划,并按计划落实,确保生产的安全、正常运行;2)负责检查设备运行状态,并记录异常,积极跟踪异常情况,处理设备故障;3)负责应对管式PECVD常见、突出、重大的设备异常、故障;制定落实整改措施、预防措施、应急方案。
4.设备概况:本设备主要功能是对硅片进行表面镀膜处理。
主要由上料部分(LOADING)、炉管(furnace)部分、气源(gas cabinet)部分、CMS部分、高频电源、真空部分、人机交换与控制界面组成。
设备为全自动处理。
上料部分: 由小车(trolly),机械手(lift axle,grip),进给桨(SLS,EFM),小车有新旧两种,依靠液压缓冲器和调节螺杆调整小车的平稳、水平、平行。
推进时气缸锁死。
机械手分为LIFT axle提升机械手(AC380V伺服电机+欧姆龙驱动器+制动+编码器构成提升组成)和水平进给的两套机械手(DC24V伺服电机+增量式编码器+RDC2控制器+制动器)。
进给桨分为SLS软着陆垂直动作部分(RDC2控制器+DC24V马达+限位开关))和EFM水平进给部分(RDC2控制器+DC24V马达+编码器+电位计)。
炉管部分由炉门、炉身、炉尾构成。
炉门由通过Bakeoff PLC控制气动组成单元执行,炉门也为特气的进口,此处的三通很重要,起到气流导向作用,也防止气路堵塞。
气动单元要时常检查有无行程和限位开关移动位。
PECVD简单故障处理刘奥运2012年02月29日1舟信息设置与加载项手动添加舟信息删除舟信息选取该项表示工艺结后舟信息自动删除选取该项表示将舟设为准备状态选取该项表示退舟工艺结束后,将该舟信息屏蔽选择该项表示该舟自动运行一次选择该项表示不能自动加载工艺选取该项表示工艺运行时,该舟必须被载入3CESAR主操作界面炉管号当前工艺信息炉温设置值PLC 状态外部炉温内部炉温TGA 状态炉管状态尾气状态PADDLE 位置SLS 位置炉门状态PID 设置值工艺运行时间高频电源的状态高频电源的设置值/实际值/电压/电流/脉冲开启/关断宽度4故障现象应对措施1.当机械臂在抓舟的过程中出现下面报警信息时“The boat sensor has detected no boat in thegrip ,although a boat should be in the grip, please check boat In grip sensor and try again ”请检察左右机械臂两个抓手的微开关是否被压下:2.当退舟时如果发生这样的报警:“BOAT FAITURE”或是EXCEPTION AT BOATLOADING SYSTEM:BOAT IS NOT CORRECTON PADDLE ,REMOVE PROBLEM MANUALLY ANDTHEN FREE DEVICE WITH SERVICE FUNCTION , RECOVERY -HANDLING ”PRESS ANY KEY TO CONTINUE具体CMI报警画面如下图所示:请仔细观察舟在桨上的位置是否正确,舟的脚是否碰到炉管。
在位置正确和脚不碰炉管的情况下先按下回车键,再执行“MANUAL—SERVICE—RECOVERY—HANDLING”命令。
如果伴随出现其它异常,请通知设备人员处理。
异常情况5在如下几种条件下:会出现如右图所示报警时:1.空舟在SLS的高位退出2.舟随桨在正常退出时,发生舟在桨上的位置不正确,或是发生舟桨分离3.舟在随桨正常退出过程中,TGA的信号被遮挡住,或是受到其它形式的干扰,致使其信号发生改变.4.其实通讯或是TGA本身的机械故障.这种报警出现后,桨通常情况下会停滞不前,并且不能复位,这时我们要根据提示先按下回车,而后根据图中提示进行操作,大多数在整个退舟过程中会出现两次这种对话框,同样操作再次执行即可.64.当在机械臂运行舟的过程中发生下面报警信息时:Can…t move topaddle ,because it‟s occupied or tube ready is missing或“UNABLE TO MOVE PROCESS BOAT TO PADDLE,POSSIBLY THE TUBE IS NOT READY”如图一所示可能的原因有两种:1.此时炉管的状态是BUSY状态,这时要执行下列操作:先将炉管内充入N2达到一个大气压,然后关闭N2,再执行MANUAL-BOAT -SERVICE-HOMING-START,此时桨会左右移动,并重新到达0位,炉管的状态,会由BUSY变成READY。
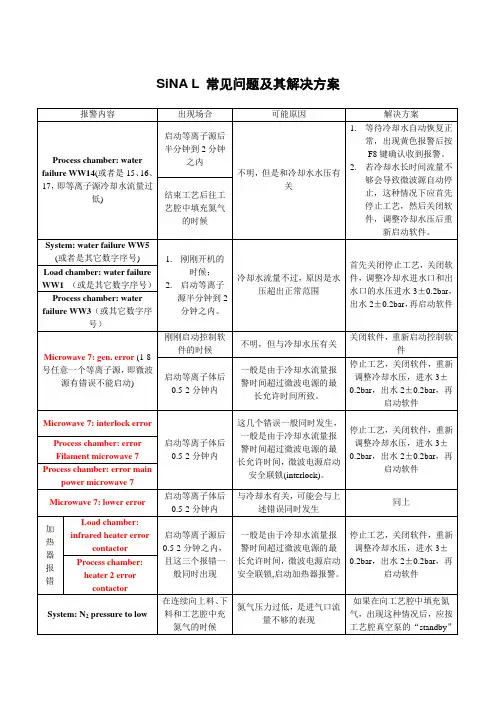
电脑错误警示电脑上显示:Boat Position Speed Out Of The Tolerance结束Recipe,关CMI,重启Computer,正常PECVD 5-L Parking: WSL: Called Channel does not exist.给PLC断电,重启电脑后正常Wrong Poti Readout报警更换Poti并校准后正常Arm Movement Rocked, Storage1 与End Position Of Grip At Storage参数不对,用备份文件覆盖后正常WSL: Load Channel Does Not Exist检查CMI并重启PC后正常Boat Lost Homing重新校准后,又发现舟进不到最大位,检查后发现管内碎片太多所制,清理碎片后一切正常过程状态显示异常重新初始化之后正常Lost Homing. Check Poti重新调整Poti后正常WSL disconnect重启CMI后正常因操作员误拍急停,导致CMI报警无法去除重启CMI后软件打不开,插拔CMI主机上所有连线后运行正常Water Flow Flange, TGA st3报警检查发现传感器流量偏小,手动调整后正常镀膜问题色差严重Stack真空不良,SiH4气孔堵塞较重,更换石英管通孔,正常石墨舟和片子颜色发白经检查NH3的进气调压阀压力过大,重新调整后正常镀膜不均匀,管内在管口的片子边缘发黄更换石英管通孔后正常片子不能镀上膜检查后发现炉管口碎片多,清除碎片及炉门密封圈后,正常交接班后运行镀膜工艺时,4根管子高频都会报警,不能运行工艺生产检查后发现控制系统故障,调整后正常PM时,OP人员清碎片时不慎弄坏石英管通气管降温处理,重新更换后,正常无法正常镀膜,流量异常.重新连接并初始化设置后正常冷却水由于冷却水管报警引起管内温度不达标调整冷却水流量计同时校准传感器参数后正常机械臂机械臂原点丢失重新调整机械臂位置,复位后正常机械臂感应不到舟检查后发现爪子上石英小方垫块脱落,重新粘上后正常机械臂Lift锁死,导致Arm无法复位在Teach模式下复位后正常机械臂死机复位后正常机械臂死掉不动,无法生产调整机械臂滚轮,复位后正常机械臂报警检查机械臂上下位置无异常后发现Grip上微动开关插头松,插紧后运行正常机械臂一侧皮带脱落,参数(机械臂两侧)位置偏差较大重新接上皮带并调整机械臂的平衡度,以及与舟的相对位置后正常机械臂无法取舟,电脑死机检查后发现操作工输入信息太多所导,删除多余工艺,手动复位Arm及Lift 后正常机械臂取舟时会停在浆一半的位置更换机械臂线后正常机械臂抓手不在一直线手动将抓手推平即可屏幕在T_Spike测温区显示“??????”检查后发现是REG97损坏,更换上下电路板,重启Can Address后正常屏幕在Act测温区显示“??????”检查后发现是TMM5损坏,更换上下电路板,重启Can Address后正常重启Cesar后,正常小车卡住小车卡住关闭CMI,取出小车后再开启CMI,正常SLS和Poti问题SLS无法上下移动经检察发现电机传动联轴卡死,调整联轴器后,正常SLS开关联轴器松脱导致浆在管中时间长而受热变形无法取出将SLS开关联轴器重新装上,降温至200℃,待浆恢复后将舟取出工艺结束后取舟失败,SLS在最大处和最小处都无法上升调整Homing=0,复位,重启,调整Poti后正常取舟时SLS显示不在上位经检查发现SLS实际已到上位,重启CESAR后运行正常屏幕状态有误状态栏显示“Tubo=Busy”不能生产复位后正常管内无舟,状态栏显示“Tubo=Busy”不能生产重启Cesar无用后,手动设定将空浆放入管内,复位后正常管内有舟,状态栏显示“Tubo=Ready”手动将浆取出,复位后正常浆取舟后仍然显示下位“SLS=Down”初始化复位后正常舟浆问题舟浆分离手动调整舟在浆上的位置,并将浆推至2082 mm位置,初始化后正常工艺结束出舟时舟浆分离手动浆舟拉到浆上,初始化后正常进舟Boat后,浆Paddle回不到零位手动复位后,正常无法进舟,发现手动移动Paddle,Poti值无变化拆下Poti轴卡死,更换后正常舟无法取出,SLS状态有误冷启动将舟取出后无法执行工艺,重启CESAR后正常进舟有抖动现象,发现机械臂与浆碰撞所致,退舟时由于浆受热变形将炉门口卡条带出降温重新安装后正常进舟后无法运行工艺重启电脑后正常工艺结束后无法取舟检查后发现碎片太多,浆被压住,清理碎片后正常浆退不到位使用Manual/Recovery/handling初始化后正常浆太低,炉门卡住调整后正常浆进不到位初始化后正常浆不能到最大位置,浆出来后不能抓舟用电位器调整浆位置后正常浆无法复位Poti坏更换浆无法退出,由于Y型嘴与卡住管子导致降温重新调整后正常自动退浆失败用Recovery/Handling命令无效,经检查原来是Arm不在中位,用Teach模式把Arm调整中位后再退舟。

CT设备常见故障及维修方法CT 设备常见故障及维修方法CT设备是诊断仪器设备的一次飞跃。
其广泛运用对提高X 线检查的分辨能力具有重要意义,使临床分辨率以及X线诊断的准确率登上了一个新的台阶。
在CT设备使用过程中,维修管理也是重要的保障方面,笔者多年从事医疗设备的维护修理工作,对于CT设备的维修管理具有一定的研究,本文将作简要论述。
CT设备;维修管理;X线检查;分析CT机器成功研制于1972年,其首先在颅脑疾病的诊断之中进行了运用,然后在1976年进一步将使用范围扩大到全身所有部位。
这一成果是X 线在放射学中的一次质的跃升。
CT设备是在X 线机的基础上研究发明的,在临床医疗诊断中,能够较高低提升X 线检查的分辨水平,比一般X线机更能够科学分辨与诊断患者病情。
我国在上个世纪70年代从国外引进了这一技术成果,现在这一先进医疗诊断设备已经在全国范围内得到了普及,发挥了重要作用,成为了医疗工作中必不可少的器械。
1 CT设备常见故障1.1以射线管出现故障例如出现旋转阳极类型故障,检测判断时可以听到较大的旋转噪音。
情况严重的时候会伴有不转和卡死状态,曝光过程中出现阳极过流等方面的现象。
灯丝出现故障主要为灯丝断了,造成射线不出的现象。
X射线管芯玻壳破裂以及漏气故障能够产生漏油、不能曝光以及真空度下降和高压打火等现象[1]。
1.2 高压产生出现故障在CT设备使用过程中,出现逆变电路故障、击穿,以及高压电容打火、击穿等,上述故障容易将对应的保险丝等装置烧断,导致无法曝光,以及一曝光就出现自动保护性中断等情况。
在曝光过程中出现突然中断的现象,并且有高压严重出错的信息提示,应当运用调试程序中的训管步骤开展检测与调试。
可以运用低千伏(KV),小毫安(mA)(80KV、20mA)进行短时间的曝光操作,检查设备实际记录KV、mA数据,如果检测中KV未出现大的异常波动,但是呈现出阳极、阴极之间电流不对称的现象,阴级较小,进一步检测可以发现灯丝电流几乎没有,此时应当怀疑X 射线管灯丝电路存在问题。
PECVD:等离子增强化学气相淀积,英文全称为Plasma Enhance Chemical Vapour Deposition目录:一、镀膜原理二、管式PECVD镀膜的各工艺参数具体控制范围三、PECVD膜的作用、简述膜的特性。
四、常见的异常情况管P部分平板部分一、镀膜原理所谓等离子体,是指气体在一定条件下受到高能激发,发生电离,部分外层电子脱离原子核,形成电子、正离子和中性粒子混合组成的一种形态,这种形态就称为等离子态。
等离子体在化学气相沉积中有如下作用:(1).将反应物中的气体分子激活成活性离子,降低反应所需的温度;(2).加速反应物在基片表面的扩散作用(表面迁移作用),提高成膜速度;(3).对于基体表面及膜层表面具有溅射清洗作用,溅射掉那些结合不牢的粒子,从而加强了形成的薄膜和基片的附着力;(4).由于反应物中的原子、分子、离子和电子之间的碰撞、散射作用,使形成的薄膜厚度均匀间接等离子:等离子没有直接和硅片接触(Roth&Rau, 岛津)直接等离子:等离子直接接触硅片( Centrotherm )间接等离子直接等离子等离子不直接接触硅片等离子直接接触硅片,会对硅片表面造成轰击等离子高能量密度等离子低能量密度高效的间接激活方式point-of-use的激活方式downstream丧失有活性的反应物downstream短,反应物可以被激活高频限制沉积区域低频可以满足较大的沉积区域存在混合和沉积的均匀性问题混合和沉积降至最低的不均匀硅片不会影响等离子的控制硅片会影响等离子的控制,会造成色差等影响没有等离子加热等离子加热硅片,钝化效果会加强只会由于机器本身产生色差片除了机器本身,还有其他原因产生色差片原理:管式PECVD的原理就是通过脉冲射频激发受热的稀薄气体进行辉光放电形成等离子体,通过两片相对应的石墨片加相反的交变电压使等离子在极板间加速撞击气体,运动到硅片表面完成镀膜过程。
影响镀膜效果主要的机器本身工艺参数有:(1).镀膜工艺时候真空压力(2).镀膜工艺温度(3).镀膜工艺气体流量比(4).镀膜工艺和总气体流量(5).射频功率以及脉冲开关时间(6).等离子体的沉积方向由于管式PECVD是直接镀膜过程,镀膜效果会受到很多外界因素的干扰,并且这些干扰对膜的质量产生很严重的影响;(1).石墨舟本身的使用状况(2).硅片表面形貌的差异二、管式PECVD镀膜的各工艺参数具体控制范围1.镀膜工艺时候真空压力真空压力对镀膜速率而言很重要,是成膜较为关键的因素,目前在尚德镀膜工艺保持稳定的情况下,管式PECVD的真空压力为;156多晶:1700 mTorr ,大约相当于226.65 Pa。
目录1 概述2 结构特征与工作原理3 主要性能指标4安装与调试5使用与操作6常见故障分析与排除7保养与维修8安全防护及处理9运输、贮存与开箱检查10重量与外形安装尺寸11附件清单12文件资料1 概述1.1PECVD设备的特点1.1.1 利用高频电源辉光放电产生等离子体对化学气相沉积过程施加影响的技术被称为等离子体增强CVD。
电子和离子的密度达109~1012个/cm3,平均电子能量可达1~10ev。
1.1.2 成膜过程在真空中进行,大约在5~500Pa范围内。
1.1.3 由于等离子体存在,促进气体分子的分解、化合、激发和电离,促进反应活性基团的生成,从而降低沉积温度。
PECVD在200℃~500℃范围内成膜,远小于其它CVD 在700℃~950℃范围内成膜。
1.1.4 PECVD成膜均匀,尤其适合大面积沉积。
1.1.5 如果用于刻蚀可以刻蚀0.3μm以下的线条。
1.1.6 由于在氨气压条件下,提高了活性基团的扩散能力,从而提高薄膜的生长速度,一般可达(30-300)nm/min以上。
1.2PECVD设备的主要用途1.2.1 利用等离子体聚合法可以容易地形成与光的波长同等程度的膜厚。
这样厚度的膜与光发生各种作用,具有光学功能性。
即:具有吸收、透射、反射、折射、偏光等作用。
由于这种性质的存在,低温沉积氮化硅减反射膜,以提高太阳能电池的光电转换效率。
1.2.2 用于集成光电子器件介质Si Y N X膜的制备,如半导体集成电路的衬底绝缘膜、多层布线间绝缘膜以及表面纯化膜的生长。
1.2.3 在医用生体材料的表面改性,功能性薄膜的制备等。
1.2.4 在电子材料当中可制成无针孔的均一膜、网状膜、硬化膜、耐磨膜等。
1.2.5 在半导体工艺中不仅用于成膜,而且用于刻蚀,也是一个较为理想的设备,它可刻0.3μm以下的线条。
1.2PECVD设备的品种规格C1M82200-1/UM (适用150×150以下方片,70片/批)C2M82100-1/UM (3"、4"圆片,适合科研和教学用)C3M (3"、4"圆片,适合科研和教学用)1.3型号的组成及其意义1.4使用环境及工作条件1.5.1 环境温度<25℃1.5.2 相对湿度<75%1.5.3 净化等级1000级~10000级1.5.4 电源三相五线,380V/50HZ,≥30KW1.5.5 供水水压0.2MPa~0.4MPa, 1/2"管接头,2路1.5.6 供气SiH4NH3N2O2CF4五路气体,气压0.2MPa~0.45MPa 1.5.7 配排风排毒装置1.5.8 整机要有一条较理想的大地线(高频电源专用线)1.5对环境及能源的影响PECVD设备本身对环境及能源没有任何影响,若用户采用不同的工艺,使用不同的气体可能对环境稍有影响,但由于用气量非常小,不会造成任何危害。
Prospeed Al CT机常见故障维修日常工作中CT机故障主要分两类:一是误操作引起的故障,这类情况最多,当机器不正常时首先要考虑是否有误操作,以免走弯路;第二类是真正的硬件故障,硬件损坏时多有故障报告,根据情况分析,找准位置。
一、误操作引起的故障故障现象一:机器无法工作,扫描架不转,开关几次依旧。
根据扫描架上的指示灯提示,是机器被紧急停机。
检查后发现是床边紧急开关不小心被按下,造成此假故障。
按起床边紧急停机开关,按控制台键盘上的复位键后恢复正常。
分析:床边的紧急停机开关,容易被误操作,机器不工作应先检查是否有紧急停机开关按下。
故障现象二:无法照相,在FILM COMPOSER窗口中按PRINT时报错。
发现在FILMCOMPOSER窗口上方的DICOM显示变为LASER CAMERA点LASER CAMERA这行字发现可以选择LASTERCAMERA或DICOM。
选回DICOM仍不能照相。
重设CAMERA参数,重启后照相正常。
分析:原因可能是因为在照相操作中医生不小心用鼠标点到DICOM并改成LASTER CAMERA。
故障现象三:扫描图像很差。
图像差开始怀疑可能是球管问题,先准备做校正。
但根据观察,CT仅仅在做头部一个协议扫描时图像差,检查参数设置,发现此协议竟用的BONT重建,而不是用的STAND。
改后再扫图像正常。
分析:可能是操作人员误改了此参数。
二、机器硬件故障故障现象一:RAWDATA硬盘坏,故障现象为:开机系统自检报HINV和NPR错,重装系统后正常。
但不久又出现同样的故障现象,有时候也报RAWDATA DISK错,且故障发生越来越频繁,总是重装系统解决问题。
分析与维修:怀疑NPR部分有接触不良,或有硬件故障。
于是把NPR的5块电路板换到同型号的机器上去试,结果没有发现哪块电路板有明显的故障,只有装回。
仔细分析故障现象,总是通过重装系统解决问题,有时候重装系统也不能解决,非要格式化硬盘再重装才行。