第三章-一维优化方法
- 格式:ppt
- 大小:899.50 KB
- 文档页数:37
一维优化方法总结第三章:一维优化方法总结1.一维优化方法介绍求解以为目标函数f (x )最优解的过程,称为一维优化,所使用的方法称为一维优化方法。
一维优化方法是优化方法中最简单、最基本的优化方法。
他不仅用来解决一维目标函数的求最优问题,而且常用于多维优化问题在既定方向上寻求最优步长的一维搜索。
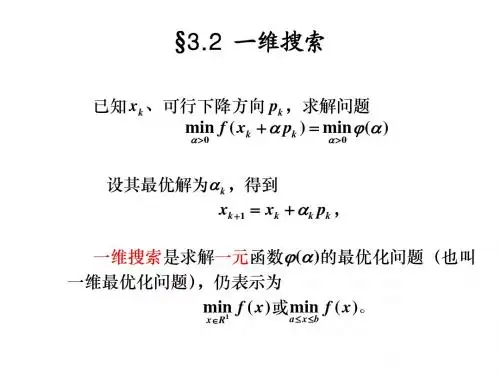
对于任一次迭代计算,总是希望从已知的点()k x 出发,沿给定的方向()k s 搜索该方向上到目标函数值最小的点(1)k +x 。
这种在确定的搜索方向()k s 上按步长因子()k α迭代使得目标函数在该方向上达到极小值的过程称为一维搜索优化计算方法。
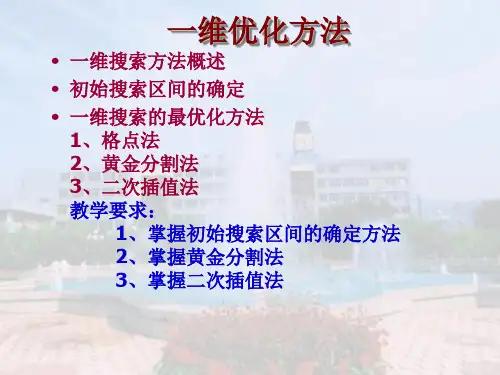
一维搜索最优化方法一般需要分两步进行:第一步是在()k s 方向上确定使得目标函数值取得最小值的步长因子()k α所在的区间;第二步是采用不同方法利用步长因子()k α求得近似解。
2.搜索区间的确定及matlab 编程所谓搜索区间就是沿给定的搜索方向()k s 上找出一个单峰区间12[,]αα,即在该区间内目标函数值的变化只有一个峰值。
本文选用进退法进行区间确定。
这里直接以一维函数为例。
设函数为()y f x =,给定初始点1x ,选定恰当的步长为0h ,求其最小点*x 。
进退法分为三步:试探搜索、前进搜索和后退搜索。
第一步:试探搜索由于最小点*x 的位置是未知的,所以首先要试探最小点*x 位于初始点1x 的左方还是右方,然后再确定包含*x 在内的搜索区间[,]a b 。
由初始点1x 沿Ox 轴正向到2x 点,210x x h =+,分别计算两点的函数值11()y f x =,22()y f x =并比较1y 和2y 值的大小,可分为两种情况:(1)若21y y <,则极小点必在点右方,应继续前进搜索;(2)若21y y >,则极小点必在1x 点左方,应反向,即作后退搜索。
第二步:前进搜索由探索后的2x 点,沿Ox 正向继续前进搜索。
令02h h =,取得前进方向的第三个点32x x h =+,对应的函数值33()y f x =,比较后两个点的函数值,有如下两种情况:(1)若23y y <,则三个点123x x x 、、的函数值的关系为123y y y ><。
--------------------------可以编辑的精品文档,你值得拥有,下载后想怎么改就怎么改--------------------------- 最优化设计数学模型中的基本概念:1、设计变量在机械设计中,区别不同的设计方案,通常是以一组取值不同的参数来表示。
这些参数可以是表示构件形状、大小、位置等的几何量,也可以是表示构件质量、速度、加速度、力、力矩等的物理量。
在构成一项设计方案的全部参数中,可能有一部分参数根据实际情况预先确定了数值,它们在优化设计过程中始终保持不变,这样的参数称为给定参数(或叫预定参数)或设计常数。
另一部分参数则是需要优选的参数,它们的数值在优化设计过程中则是需要优选的参数,它们的数值在优化计算过程中是变化的,这类参数称为设计变量,它相当于数学上的独立自变量。
一个优化问题如果有n 个设计变量,而每个设计变量用(1,2,,)i x i n =表示,则可以把n 个设计变量按一定的次序排列起来组成一个列阵或行阵的转置,即写成1212[,,,]T n n x x x x x x ⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦x(8-1) 我们把x 定义为n 维欧式空间的一个列向量,设计变量12,,,n x x x 为向量x 的n 个分量。
以设计变量12,,,n x x x 为坐标轴展成的空间称为n 维欧式空间,用n R 表示。
该空间包含了该项设计所有可能的设计方案,且每一个设计方案就对应着设计空间上的一个设计向量或者说一个设计点x 。
2、目标函数优化设计是在多种因素下欲寻求使设计者员满意、且适宜的一组参数。
“最满意”、“最适宜”是针对某具体的设计问题,人们所追求的某一特定目标而言。
在机械设计中,人们总希望所设计的产品具有最好的使用性能、体积小、结构紧凑、重量最轻和最少的制造成本以及最多的经济效益,即有关性能指标和经济指标方面最好。
在优化设计中,一般将所追求的目标(最优指标)用设计变量的函数形式表达,称该函数为优化设计的目标函数。
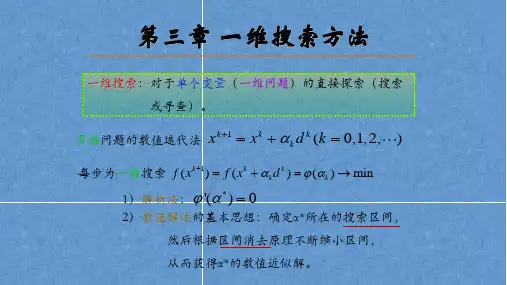
一. 一维优化(搜索)方法1. 一维问题:多维问题优化问题可分解为很多个一维优化问题—沿某个方向优化问题。
2. 非凸规划问题的优化方法● 网格法 *)(.m i n x x f i →,缩小区间,继续搜索。
●Monte Carlo 方法 b i a i i x x x )1(αα-+=, 10≤≤i α, 随机数。
比较各次得到的*j x 得解*x ● 遗传算法(专题)(二)区间消去法(凸函数)1. 搜索区间的确定:高—低--高(b a f f f <>)则 区间内有极值。
2. 区间消去法原理:在区间 [a, b] 内插两个点a 1, b 1 保留有极值点区间,消去多余区间。
[]b a f f a a ,121→> []121,b a f f a a →<?21→=a a f f缩短率:LL L ∆-=λ(三)0.618法 1. Fibonacci 法—理想方法,不常用。
2. 黄金分割法(0.618法)●原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。
左右对称。
ll ∆-=1λλλ-=12618034.02411=++-=λ●程序:p52(四)插值方法1. 抛物线法原理:任意插3点:321βββ<<算得:()11βf y =; ()22βf y =; ()33βf y = 要求:321y y y <>设函数)(x f 用经过3点的抛物线2210)(x a x a a x P ++=代替,有1212110y a a a =++ββ 2222210y a a a =++ββ 3232310y a a a =++ββ 解线代数方程⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321210233222211111y y y a a a ββββββ 解得: ()()()()()()1332213212131322ββββββββββββ----+-+-=y y y a()()()()()()1332213221221232132221ββββββββββββ----+-+-=yyya212*a a x p -=≈β()()()()()()321213132322122123213222y y y yyyββββββββββββ-+-+--+-+-=程序框图p572. 3次曲线插值方法已知:b a <; 0)(<'a f ; 0)(>'b f 。
第3章一维优化方法一维优化方法是数学中用于求解最优化问题的一种重要技术。
在实际问题中,往往需要找到一个函数的最小值或最大值点,一维优化方法就是这样一种方法,可以找到函数在一些区间内的最小值或最大值点。
一维优化方法有很多种,常见的有穷举法、黄金分割法、斐波那契法、抛物线法、割线法、牛顿法等。
不同的方法有不同的适用范围和求解效率,我们可以根据具体问题的特点选择合适的方法进行求解。
穷举法是一种最简单的一维优化方法,它通过遍历函数在给定区间内的所有可能取值,找到其中的最小值或最大值。
穷举法的缺点是计算量大,当问题规模较大时,不适用。
但是它的优点是简单易懂,适用于初学者入门。
黄金分割法是一种较为常用的一维优化方法,它通过划分给定区间,选择区间内一些点进行迭代,不断缩小区间范围,直到找到最优解。
黄金分割法的优点是收敛速度较快,适用于一些比较复杂的问题。
斐波那契法是一种基于斐波那契数列的一维优化方法,它可以在一定程度上提高黄金分割法的效率。
斐波那契法的关键在于选择合适的斐波那契数列作为迭代次数,通过比较函数在斐波那契数列中两个相邻点的取值,确定新的区间范围。
抛物线法是一种通过拟合函数的抛物线来求解最优解的一维优化方法。
它通过选择合适的三个点,构造一个简单的二次函数,找到该函数的极小值点作为最优解。
抛物线法的优点是计算量相对较小,但是在一些复杂的问题中可能不适用。
割线法是一种通过逐步逼近函数极值点的一维优化方法。
它通过选择给定区间上两个初始点,不断用割线近似替代切线,找到极小值点。
割线法的优点是收敛速度快,但是需要在迭代过程中进行导数计算,对于一些无法求导的函数不适用。
牛顿法是一种通过利用函数在一些点处的一阶导数来逼近极值点的一维优化方法。
它通过选择给定区间上一个初始点,利用导数的概念找到极小值点。
牛顿法的优点是收敛速度非常快,但是对于一些无法求导的函数不适用。
综上所述,一维优化方法是数学中用于求解最优化问题的一种重要技术。