炮塔转动参数检测系统设计
- 格式:doc
- 大小:133.00 KB
- 文档页数:5
某自行高炮浮动参数监测系统的设计与实现孙致远;郑坚;熊超;殷军辉【摘要】为了能够实时掌握自行高炮自动机性能,提高装备的可靠性,利用无线传感器网络技术,设计并建立了自行高炮浮动参数监测系统。
该监测系统利用磁致伸缩位移传感器,实现了后坐位移的精确测量;设计了一种具有高速采集和片上处理功能的无线传感器网络节点,实现了数据的采集、储存与无线传输;开发了上位机软件,能够根据回传数据,完成后坐曲线的显示和浮动参数的自动提取。
实弹测试试验表明,该监测系统能够基本满足自行高炮浮动参数在线监测的要求。
%For the purpose of keeping track of the performance of the auto-mechanism of self-propelled anti-aircraft gun and improve its reliability,the floating parameter monitoring system of self-propelled anti-aircraft gun was designed and established based on the wireless sensor networks (WSNs)technolo-gy. In the monitoring system,the magnetostriction displacement sensors were used to successfully and accurately pick up the recoil displacement. A WSN node with high speed acquisition and on-chip pro-cessing was designed to realize the data collection,storage and wireless transmission. The host compu-ter software was designed to achieve the recoil curve display and the floating parameter automation ex-traction according to the data received. The firing test shows that the system can basically satisfy the floating parameter on-line monitoring requirement.【期刊名称】《火炮发射与控制学报》【年(卷),期】2016(037)002【总页数】5页(P62-66)【关键词】浮动参数;状态监测;位移传感器;无线传感器网络【作者】孙致远;郑坚;熊超;殷军辉【作者单位】军械工程学院,河北石家庄 050003;军械工程学院,河北石家庄050003;军械工程学院,河北石家庄 050003;军械工程学院,河北石家庄 050003【正文语种】中文【中图分类】TJ206自动机是自行高炮火力系统重要的组成部分之一,直接实现弹丸的快速连续击发。
坦克炮塔转动惯量测量坦克是现代装甲部队的重要装备,其中坦克炮是坦克最主要的战斗武器之一。
而坦克炮的炮塔转动惯量是影响坦克炮精度和作战效能的重要因素之一。
因此,对坦克炮塔转动惯量的测量就显得非常重要。
本文将介绍坦克炮塔转动惯量测量的原理、方法及其应用。
1. 坦克炮塔转动惯量的意义坦克炮是坦克战斗力的核心,它的精度和射速都是影响其作战效能的重要因素。
而炮塔转动惯量则是影响炮塔转动速度和精度的因素之一。
转动惯量越大,炮塔的转速就会越慢,从而影响射击精度和作战效率。
因此,测量坦克炮塔转动惯量对于保障坦克作战效能有着重要的意义。
2. 坦克炮塔转动惯量的测量方法(1)旋转法旋转法是最为常见的坦克炮塔转动惯量测量方法。
具体测量步骤如下:1)将坦克炮塔固定在一个水平的转盘上。
2)测量并记录炮塔的总重量。
3)以转盘中心为转轴,给予一个初速度使炮塔开始转动。
4)测量炮塔随时间的转动角度,并记录下来。
一般建议测量时间不少于5分钟。
5)根据测量数据可以求得炮塔的转动惯量。
其中,炮塔转动惯量的测量公式为I=J+(m+M)R²,其中I为转动惯量,J为转盘的转动惯量,m为炮塔的质量,M为转盘的质量,R为转盘的半径。
(2)振荡法振荡法比旋转法测量时间短,但相对较为复杂。
具体测量步骤如下:1)将炮塔的传动机构制动,使炮塔停止转动。
2)给传动机构以一个适当的扭矩,使炮塔开始振荡。
3)测量炮塔的振动时间和振动周期,并记录下来。
4)根据测量数据可以求得振荡法下的炮塔转动惯量。
其中,炮塔转动惯量的测量公式为I=mgL/4π²T²,其中m 为炮塔的质量,g为重力加速度,L为振动长度,T为振动周期。
3. 坦克炮塔转动惯量测量的应用坦克炮塔转动惯量的测量结果可以为军队提供重要的参考数据。
首先,在坦克设计和制造中,测量得出的炮塔转动惯量数据可以为坦克炮塔的设计和制造提供重要依据,提高坦克的作战效能。
其次,在坦克使用中,测量得出的炮塔转动惯量数据可以为坦克的使用和维护提供参考,从而保障坦克的稳定性和安全性。
浅析炮控系统性能参数测试方案【摘要】随着高新技术在坦克武器系统研发中的广泛应用,现行的测试手段已无法满足新型坦克武器系统鉴定试验的要求。
因此,迫切需要开展相应的武器系统总体试验技术的研究,通过研制高精度的坦克炮控性能测试系统,来满足试验鉴定的需要。
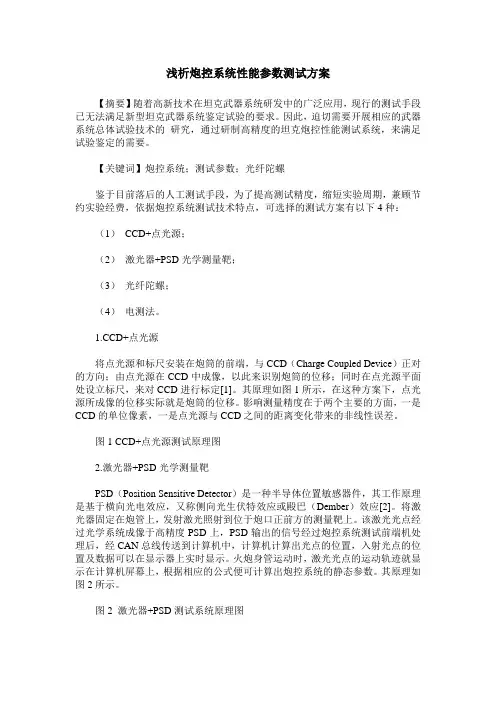
【关键词】炮控系统;测试参数;光纤陀螺鉴于目前落后的人工测试手段,为了提高测试精度,缩短实验周期,兼顾节约实验经费,依据炮控系统测试技术特点,可选择的测试方案有以下4种:(1)CCD+点光源;(2)激光器+PSD光学测量靶;(3)光纤陀螺;(4)电测法。
D+点光源将点光源和标尺安装在炮筒的前端,与CCD(Charge Coupled Device)正对的方向;由点光源在CCD中成像,以此来识别炮筒的位移;同时在点光源平面处设立标尺,来对CCD进行标定[1]。
其原理如图1所示,在这种方案下,点光源所成像的位移实际就是炮筒的位移。
影响测量精度在于两个主要的方面,一是CCD的单位像素,一是点光源与CCD之间的距离变化带来的非线性误差。
图1 CCD+点光源测试原理图2.激光器+PSD光学测量靶PSD(Position Sensitive Detector)是一种半导体位置敏感器件,其工作原理是基于横向光电效应,又称侧向光生伏特效应或殿巴(Dember)效应[2]。
将激光器固定在炮管上,发射激光照射到位于炮口正前方的测量靶上。
该激光光点经过光学系统成像于高精度PSD上,PSD输出的信号经过炮控系统测试前端机处理后,经CAN总线传送到计算机中,计算机计算出光点的位置,入射光点的位置及数据可以在显示器上实时显示。
火炮身管运动时,激光光点的运动轨迹就显示在计算机屏幕上,根据相应的公式便可计算出炮控系统的静态参数。
其原理如图2所示。
图2 激光器+PSD测试系统原理图3.光纤陀螺光纤陀螺FOG(Fiber Optic Gyroscope),是利用光纤构成的萨格奈克(Sagnac)干涉仪[3],是一种纯光学、全固态陀螺仪。
一种高精度测量坦克炮塔动态转角的方法权贵秦;冯伟强;张建峰;于询【摘要】坦克炮塔相对底盘转角的测量精度直接决定了稳瞄系统与惯导系统的精度.目前,国内的主战坦克所配备的坦克炮塔,其相对底盘的转角测量装置的测量精度低,仅解决坦克车体的转向问题.针对稳瞄系统与惯导系统对坦克炮塔相对底盘转角的精度要求问题,提出了一种由光电定位系统、机械传动系统和旋转变压器组成的动态高精度测角装置,介绍了其工作原理和工作过程,对该测角装置进行光电自准直标定并对误差进行理论分析,最后通过上车实验证明该测角系统能够满足实际需求.实践证明:该测量系统能够在通电瞬间确认位置,具有绝对零位记忆功能,其测角精度为42″.%Tank turret rotation angle measurement accuracy relative to the chassis directly determines the precision of the stable sighting system and the inertial navigation system. At present, the main battle tank equipped with a tank turret in the angle measurement device which has low measurement accuracy relative to the chassis can solve the problem of steering the tank body only. This paper proposed a high-precision angle measurement device which was composed of location and orientation system, mechanical drive system and resolver. It firstly introduced the working principle and work process, followed by the angle measuring device calibration and the theoretical analysis of error, the final joint commissioning proved this angle measuring system met the actual demand. Results indicate that this measurement system can confirm the location when instantaneously powered and has absolutely zero memory function, the angular accuracy is 42\".【期刊名称】《应用光学》【年(卷),期】2012(033)002【总页数】6页(P321-326)【关键词】旋转变压器;光电定位系统;传动比;光电编码【作者】权贵秦;冯伟强;张建峰;于询【作者单位】西安工业大学光电工程学院,陕西西安710032;西安工业大学光电工程学院,陕西西安710032;西安应用光学研究所,陕西西安710065;西安工业大学光电工程学院,陕西西安710032【正文语种】中文【中图分类】TN202;TP391.4引言动态角度测量[1]的精度直接影响陆用车载武器、航空等领域中的跟踪、定位、打击、制导的准确性。
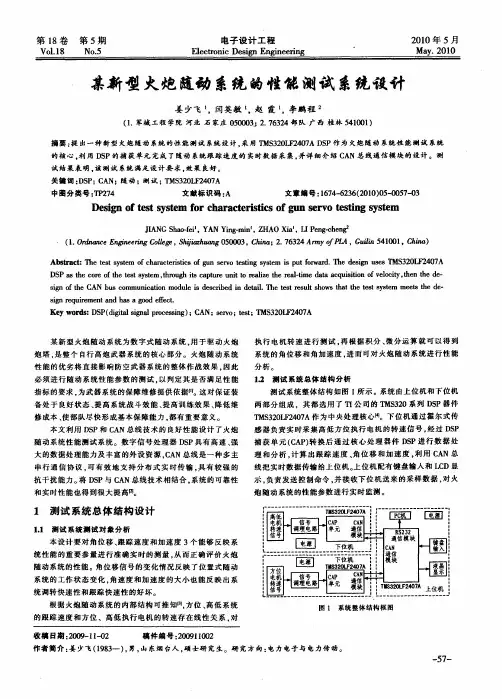
某新型火炮随动系统的性能测试系统设计摘要:提出一种新型火炮随动系统的性能测试系统设计,采用TMS320LF2407A DSP 作为火炮随动系统性能测试系统的核心,利用DSP 的捕获单元完成了随动系统跟踪速度的实时数据采集,并详细介绍CAN 总线通信模块的设计。
测试结果表明,该测试系统满足设计要求,效果良好。
关键词:DSP;CAN;随动;测试;TMS320LF2407A某新型火炮随动系统为数字式随动系统,用于驱动火炮炮塔,是整个自行高炮武器系统的核心部分。
火炮随动系统性能的优劣将直接影响防空武器系统的整体作战效果,因此必须进行随动系统性能参数的测试,以判定其是否满足性能指标的要求,为武器系统的保障维修提供依据。
这对保证装备处于良好状态、提高系统战斗效能、提高训练效果、降低维修成本、使部队尽快形成基本保障能力,都有重要意义。
本文利用DSP 和CAN 总线技术的良好性能设计了火炮随动系统性能测试系统。
数字信号处理器DSP 具有高速、强大的数据处理能力及丰富的外设资源,CAN 总线是一种多主串行通信协议。
可有效地支持分布式实时传输,具有较强的抗干扰能力。
将DSP 与CAN 总线技术相结合,系统的可靠性和实时性能也得到很大提高。
1 测试系统总体结构设计1.1 测试系统测试对象分析本设计要对角位移、跟踪速度和加速度3 个能够反映系统性能的重要参量进行准确实时的测量,从而正确评价火炮随动系统的性能。
角位移信号的变化情况反映了位置式随动系统的工作状态变化,角速度和加速度的大小也能反映出系统调转快速性和跟踪快速性的好坏。
根据火炮随动系统的内部结构可推知,方位、高低系统的跟踪速度和方位、高低执行电机的转速存在线性关系,对执行电机转速进行测试,再根据积分、微分运算就可以得到系统的角位移和角加速度,进而可对火炮随。
一种基于陀螺的炮塔转角动态高精度测量方法
于洵;申双琴;徐岩;谢辉
【期刊名称】《国外电子测量技术》
【年(卷),期】2012(31)12
【摘要】针对稳瞄惯导一体化系统中,旋转炮塔相对底盘转角的测量问题,解决目前炮塔转角的动态、高精度、实时性测量存在的不足和限制。
文中在刚体姿态动力学、姿态测量技术理论基础上,提出基于微电子机械系统(micro-electromechanical systems,MEMS)陀螺、加速度计和磁传感器构建的转角测量系统,设计了基于四元数的姿态估计滤波器。
对测量装置进行试验和标定,结果表明:其在坦克内部复杂的
环境中,能有效抑制陀螺的随机漂移,满足技术要求,测量精度达80″.
【总页数】4页(P36-39)
【关键词】稳瞄惯导一体化系统;炮塔转角;MEMS陀螺;加速度计;磁传感器
【作者】于洵;申双琴;徐岩;谢辉
【作者单位】西安工业大学光电工程学院;中国兵器科学研究院;西安应用光学研究
所
【正文语种】中文
【中图分类】TB922
【相关文献】
1.基于磁悬浮控制力矩陀螺的航天器姿态高精度高带宽测量方法 [J], 王华;王平;任元;陈晓岑
2.基于陀螺和卫星定位组合的滚转角测量方法 [J], 王超;王永骥;霍鹏飞;周翔;杨小会
3.基于准直光束的高精度滚转角测量方法研究 [J], 郝雯霞;吕勇;李晓英;陈青山;耿蕊;张明珠
4.一种高精度测量坦克炮塔动态转角的方法 [J], 权贵秦;冯伟强;张建峰;于询
5.一种基于容栅编码器测量炮塔高精度动态转角的方法 [J], 于洵;马林;刘雪松;韩峰;薛小乐
因版权原因,仅展示原文概要,查看原文内容请购买。
![炮塔转动惯量实验测试装置[实用新型专利]](https://uimg.taocdn.com/94ec69c6453610661fd9f4b2.webp)
专利名称:炮塔转动惯量实验测试装置专利类型:实用新型专利
发明人:吴三灵,王宝元,温波
申请号:CN00262463.X
申请日:20001201
公开号:CN2498598Y
公开日:
20020703
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种炮塔转动惯量实验测试装置,用以解决自行火炮和坦克等炮塔绕其回转中心的转动惯量实验测试。
将自行火炮或坦克放在平坦的地面上,炮塔和底盘不分离,解除炮塔方向机对炮塔转动的约束。
在炮口左右各连接一弹簧,其弹簧另一端与固定不动物体相连。
给炮塔一扰动,使其产生自由振动,通过测量炮口振动加速度及振动周期,从而得到炮塔绕其回转中心的转动惯量。
申请人:王宝元,吴三灵,温波
地址:712099 陕西省咸阳市1号信箱
国籍:CN
更多信息请下载全文后查看。
炮塔转动阻尼系数试验测试技术王宝元;衡刚;周发明;喻华萨;陈彦辉【摘要】炮塔转动存在阻尼,该阻尼不仅影响火炮随动系统特性,也影响火炮结构动力学特性.为了研究火炮炮塔转动阻尼系数,提出了一种炮塔转动阻尼系数实验测试原理和方法,利用支撑炮塔的底盘作为测试平台,解除方向机约束,使炮塔形成惯量弹簧系统,在外界初始扰动下,炮塔发生自由衰减振动,通过测试该自由衰减振动曲线,并进行数据处理,得到炮塔转动阻尼系数.为了验证上述原理和方法的准确性,设计了模拟炮塔试验装置,进行了其转动阻尼系数实验测试.结果表明,该原理和方法可以用来测量炮塔转动阻尼系数且测量精度可以满足使用要求.利用此原理和方法,完成了某自行火炮实际炮塔转动阻尼系数实验测试,得到了该炮炮塔的阻尼系数测试值.【期刊名称】《火炮发射与控制学报》【年(卷),期】2013(000)001【总页数】4页(P67-70)【关键词】炮塔;转动;阻尼系数;测试技术【作者】王宝元;衡刚;周发明;喻华萨;陈彦辉【作者单位】西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳712099;西北机电工程研究所,陕西咸阳 712099【正文语种】中文【中图分类】TH113火炮结构中都存在着阻尼,阻尼对火炮结构的动力学特性有着重要的影响。
阻尼不仅要消耗运动结构的能量,增加驱动机构的输入功率,而且阻尼又能减小振动体的响应,对减振有利,对提高火炮射击密集度有好处。
炮塔通过座圈和底盘连接,炮塔在座圈上转动时的阻尼,一方面对火炮随动系统特性有影响,另一方面对火炮结构力学参数测试也有影响。
因此,炮塔转动阻尼系数试验测试很有意义[1-3]。
由于炮塔转动阻尼系数试验测试的复杂性和难度,到目前为止,还没有见到炮塔转动阻尼系数试验测试的相关报道,动力学分析时基本都是使用没有经过验证的经验系数。
火炮随动控制系统监控仪设计蔡荣立,谭番琼(西安工业大学,陕西西安 710032)摘 要:介绍基于嵌入式PC104计算机和MCS 251单片机的火炮随动控制系统监控仪设计。
该系统要求实时显示火炮高低和方位主令曲线及火炮位置反馈曲线,并且实时监控火炮的极限位置。
采用PC104模块实现主令发送及曲线显示,单片机实时检测火炮极限位置,单片机和PC104模块与火炮随动系统之间通过CAN 总线通信,单片机与PC104模块之间通过串口进行数据设置及状态信息传送。
该设计不仅利用PC104模块实现了强大的计算及图形显示功能,同时采用单片机又保证了整体系统的实时性。
关键词:随动系统;PC104;CAN 总线;串行通信中图分类号:TP275 文献标识码:A 文章编号:10042373X (2010)0920032203Design of Monitoring Apparatus in Mobile Servo 2control System of ArtilleryCA I Rong 2li ,TAN Fan 2qiong(Xi ’an Technological University ,Xi ’an 710032,China )Abstract :The design of the monitering apparatus in the molile servo 2control system for artillery based on the embedded PC104computer and MCS 251monolithic integrated circuit is introduced.The requirements to carry out the real 2time display of the master curves of elevation and azimuth ,feedback curve of artillery position and real 2time monitoring of the artillery ′s limit 2ing position should be satisfied for the system.PC104modules are used to achieve the master ′s delivery and display of curve.MCU are used to perform the real 2time detection of the artillery limited position.The communication between PC104module and MCU with artillery servo 2system is achieved by CAN bus.The transmission of status information and data setting be 2tween the MCU and PC104modules are achieved by a serial port.This design not only realized the formidable f unction of computation and the graphical display by the PC104modules ,but also ensured overall system ′s timeliness through MCU.K ey words :servo 2control system ;PC104;CAN bus ;serial communication收稿日期:20092122080 引 言近年来,随着高新技术武器的不断涌现,其目标识别能力、隐蔽程度、目标命中精度均大大提高,这给火炮武器系统提出了新的要求。
防恐火炮随动系统设计文献阅读综述1项目背景“9·11”以来,各类恐怖活动,特别是以“基地”组织为核心的国际恐怖势力的恐怖袭击出现一些新的变化与特点,无论是从恐怖活动的规模上、频率上、还是组织策划、技术手段上都远非传统恐怖活动相比拟。
2009年4月30日,美国国务院向国会提交了《2008年度国家反恐报告》。
根据报告统计,2008年全球共发生11770起恐怖袭击事件,比2007年减少18%,死亡15765人,比2007年减少30%。
约40%的恐怖袭击发生在中东地区,南亚(包括巴基斯坦和阿富汗)是35%。
根据美国国家反恐中心“世界恐怖事件跟踪系统”的最新统计,2009年全球发生了10999起恐怖事件,死亡14971人。
防恐反恐涉及到方方面面,除必要的人力资源外,科技在应对恐怖主义中的作用越来越重要。
科技在反恐中应用及水平不断提高,既可提高反恐效率,也可突破一些反恐难点,既可提高许多防恐措施的层次,也可成为安保经济的一个增长亮点。
世界许多国家都高度重视反恐的科技投入,并积极探索多种科技反恐的方式与手段。
因此,各国在加强方方面面反恐措施的同时,更加注重反恐高科技手段。
项目以浙江先锋机械有限公司的技术需求为背景,该公司是生产枪械和警用装备的军工企业,位于长三角的浙江省桐乡市,地理环境优越,交通便利。
公司占地面积10万平方米,总资产1.5亿元,现有职工400余人。
公司拥有较为完善的加工设备和检测手段,具有武器装备科研生产许可证和武器装备承制单位资格认证、公安单警装备生产入围企业等资质。
通过了国军标GJB9001A-2000质量体系认证,是国家二级保密资格单位、高新技术企业,拥有省级研发中心。
公司目前除了生产军用装备外,还研制生产反恐防暴装备。
主要有:18.4毫米防暴枪、35毫米防暴榴弹发射器、警用制式刀具和各类多功能匕首、隔离网路障、防暴隔离墙等,分别装备于公安、武警部队。
公司将一如既往地在现有反恐防暴装备的基础上作进一步的拓展和深度开发,满足我公安、武警部队在维护社会治安和反恐防暴特殊环境下的需求,为反恐防暴装备现代化作出应有的贡献。
收稿日期:2019-12-16;修回日期:202-06-20基金项目:北京市教育委员会科技计划一般项目(KM 201810017007);国家自然科学基金项目(31101088);北京高等学校高水平人才交叉培养 实培计划 项目㊂作者简介:周建军(1977 ),男,博士,副教授,主要从事检测技术与自动化装置研究,E -m a i l :z h o u j i a n j u n @b i pt .e d u .c n ;李英顺(1971 ),女发,博士,教授,硕士生导师,主要从事故障诊断专家系统与健康管理方面的研究,通信联系人,l i y i n g s h u n @b i pt .e d u .c n ㊂第28卷 第4期2020年12月北京石油化工学院学报J o u r n a l o f B e i j i n g I n s t i t u t e o f P e t r o c h e m i c a l T e c h n o l o g yV o l .28 N o .4D e c .2020文章编号:1008-2565(2020)04-0043-06坦克炮控系统综合检测平台设计周建军,周文彬,盛 沙,李英顺*,耿思媛,马景兰(北京石油化工学院信息工程学院,北京102617)摘要:坦克炮控系统的快速故障定位与高效检修是我国陆军军械装备未来研究发展的重点方向㊂研制了一种由检测电缆㊁信号调理板㊁P C I 数据采集卡㊁工控机和综合检测软件等几部分组成的坦克炮控系统综合检测平台㊂综合检测软件操作开关量输出卡和信号调理板,控制被测部件的相应接触器或继电器开关动作,模拟被测试工况完成部件功能测试㊂详细分析设计了信号调理电路板与综合检测平台整体结构㊂采用故障树分析方法对炮控箱故障进行总体分析㊁梳理,并建立了炮控箱故障树㊂该综合检测平台可完成对5种型号坦克中的炮控箱㊁电机放大机控制盒和陀螺仪组等部件的综合检测和故障诊断㊂关键词:信号调理;综合检测;故障诊断;炮控系统中图分类号:T J 811文献标志码:AD O I :10.19770/j.c n k i .i s s n .1008-2565.2020.04.0008开放科学(资源服务)标识码:D e s i g n o f C o m pr e h e n s i v e D e t e c t i o n P l a t f o r m f o r T a n k G u n C o n t r o l S ys t e m Z HO U J i a n j u n ,Z HO U W e n b i n ,S H E N G S h a ,L I Y i n g s h u n *,G E N G S i y u a n ,M a J i n gl a n (C o l l e g e o f I n f o r m a t i o n E n g i n e e r i n g ,B e i j i n g I n s t i t u t e o f P e t r o c h e m i c a l T e c h n o l o g y ,B e i j i n g 102617,C h i n a )A b s t r a c t :I t i s t h e k e y d i r e c t i o n i n w h i c h f a u l t l o c a t i o n r a p i d l y a n d m a i n t e n a n c e e f f i c i e n t l y of t a n kg u n c o n t r o l s y s t e m f o r th e f u t u r e o r d n a n c e e q ui p m e n t r e s e a r c h o f C h i n a s A r m y .A c o m pr e h e n -s i v e d e t e c t i o n p l a t f o r m f o r t a n k g u n c o n t r o l s y s t e m w a s d e v e l o p e d i n t h i s p a pe r .T h i s p l a tf o r m i s m a i n l y c o m p o s e d o f d e t e c t i o n c a b l e ,s ig n a l c o n d i t i o n i n g b o a r d ,P C I d a t a a c qu i s i t i o n c a r d ,i n d u s -t r i a l c o m p u t e r a n d c o m p r e h e n s i v e d e t e c t i o n s o f t w a r e .F u r t h e r m o r e ,t h e c o m pr e h e n s i v e d e t e c t i o n s o f t w a r e c a n o p e n o r c l o s e t h e c o r r e s p o n d i n g r e l a y s w i t c h o f t h e t e s t e d c o m p o n e n t b y o p e r a t i n gt h e s w i t c h o u t p u t c a r d a n d t h e s i g n a l c o n d i t i o n i n g b o a r d ,a n d c o m p l e t i n g th e f u n c t i o n a l t e s t o f t h e c o m p o n e n t u n d e r t h e s i m u l a t e d t e s t c o n d i t i o n s .T h e c o m pr e h e n s i v e d e t e c t i o n p l a t f o r m f o r t h e g u n c o n t r o l s y s t e m w a s d e s i g n e d b o t h i n o v e r a l l a n d t h e s t r u c t u r e o f t h e s i g n a l c o n d i t i o n i n g ci r -c u i t b o a r d a n d t h e c o m p r e h e n s i v e d e t e c t i o n p l a t f o r m i n d e t a i l e s p e c i a l l y.I n a d d i t i o n ,t h e f a u l t t r e e d i a gn o s i s m e t h o d w a s u s e d t o l o c a t e t h e f a u l t o f t h e g u n c o n t r o l b o x .T h i s p l a t f o r m c a n c o m -p l e t e t h e c o m p r e h e n s i v e d e t e c t i o n a n d f a u l t d i a g n o s i s f o r t h e g u n c o n t r o l b o x ,m o t o r a m pl i f i e r c o n t r o l b o x a n d g y r o s c o p e g r o u p i n t h e f i v e t y pe s of t a n k s .K e y wo r d s :s i g n a l c o n d i t i o n i n g ;c o m p r e h e n s i v e d e t e c t i o n ;f a u l t d i a g n o s i s ;t h e g u n c o n t r o l s y s t e m随着军事作战原则的发展和高新技术在军事装备中的广泛应用,装备的技术保障能力在部队的战斗力中占据了越来越重要的地位,已成为保证装备完好㊁运行安全可靠㊁形成作战能力的先决条件[1-3]㊂炮控系统是坦克火力控制主线末端的执行系统,承担着驱动和稳定坦克火炮炮塔的作用,是充分发挥火控系统性能,实现 先敌开火㊁首发命中 的重要保证㊂对于坦克炮控系统而言,其复杂度较高㊁故障排除周期较长[4-5]㊂一些坦克修理厂修理任务繁重,而炮控系统检测平台可快速完成检修工作㊁提高检修效率㊂为此,研制具有采集精度高㊁故障定位准确和体积小等优点的坦克炮控系统综合检测平台是十分必要的㊂国内一些科研单位对坦克炮控系统检测设备方面进行了研究㊂朱斌等[6]研制了某型坦克炮控系统综合检测仪,能够实现对某型坦克炮控系统各部件与中修相应的性能工况检查,包括陀螺仪组㊁配电盒㊁操纵台和角度限制器等8个电气部件㊂张成名等[7]设计了一种基于P C104总线的便携式武器装备电子系统综合检测仪,满足了武器装备基层级可更换单元的检测诊断,该检测仪具有通用性,可以完成武器装备电子系统的现场测试㊂1个综合检测平台只检测1个型号坦克的几个部件,存在占用空间大㊁资源利用率不高等问题,所以笔者设计了一款可以检测5个型号坦克的炮控系统综合检测平台㊂故障树分析法是一种知识组织方式,其打破了传统诊断方法的产生式规则,避免了故障分析数据快速膨胀,可以将系统复杂度大大降低,其优越性还在于逻辑推理严谨且数学计算严密,既可以分析系统故障性质类型,又可以分析顶事件受底事件的影响程度[8]㊂彭华亮等[9]利用故障树分析方法设计了一种发射车电气系统故障诊断系统,并验证了其系统的通用性和有效性㊂李贵虎等[10]提出并建立了机械击发机构的故障树,对可能击发机构故障起因进行故障分析,并应用于某火炮炮弹留膛故障,解决了传统诊断方法不能彻底排除全部故障的问题㊂因此,笔者采用故障树诊断方法与采集的设备状态数据相结合的方法实现炮控系统的故障诊断㊂1综合检测平台总体设计坦克炮控系统综合检测平台主要由检测电缆㊁信号调理板㊁P C I数据采集卡㊁工控机和综合检测软件等几部分组成㊂该平台可完成5种型号坦克的炮控箱㊁电机放大机控制盒㊁线加速度计和陀螺仪组等部件的故障检测,达到系统级㊁部件级㊁板级3个层次的检测维修,具有通用化㊁模块化㊁信息化的特点㊂每种型号的坦克部件由一块信号调理电路板完成检测,这样5种型号坦克部件检测时相互独立㊁互不影响㊂综合检测软件检测部件某一项功能时,通过软件控制开关量输出卡和信号调理板控制被测部件相应接触器或继电器开关,模拟被测试工况完成部件功能测试㊂软件记录P C I采集卡采集的检测部件被测信号的数据,并计算其与正常参考值的偏差,使用数据库存储采集的数据和检测结果㊂该检测平台工作原理如图所示㊂图1坦克炮控系统检测平台工作原理F i g.1 W o r k i n g p r i n c i p l e o f d e t e c t i o n p l a t f o r m f o r t a n kg u n c o n t r o l s y s t e m炮控系统被检测信号可由3种信号组合完成各项检测内容㊂这3种信号分别为模拟输入信号,信号调理到-10~10V范围内;采集卡模拟输出信号,范围为-10~10V,通过信号调理板可以调理到-10~135V;开关量控制信号,可以通过控制继电器实现不同的功能,比如直接连接2个信号㊁信号供电或信号接地等㊂数据采集卡选择:综合检测平台选用2块P C I-1713完成信号采集㊂P C I-1713是一款适用于P C I 总线的隔离高速模拟量输入卡㊂其提供了32个模拟量输入通道㊂通道的采样速率高达100k S/s,分辨率为12b i t且提供2500V D C的隔离保护㊂检测平台模拟量输出卡选择研华P C I-1724U 板卡,是一种适用于P C I总线带隔离的24通道模拟量输出卡㊂P C I-1724U的每个模拟量输出通道都配有1个14b i t的双缓存D A C㊂检测平台开关量输出卡选择研华P C I-1751板卡,P C I-1751是一款适用于P C I总线的48b i t数字量I/O卡㊂其可提供48b i t并行数字输入/输出通道以及3个计时器㊂综合检测平台控制信号由P C I-1724U和P C I-1751板卡经过信号转接板接入信号调理板,再给到被测部件㊂检测信号通过信号调理板,经过信号转接板接入P C I-1713,综合检测软件实现被测信号44北京石油化工学院学报2020年第28卷采集㊂2信号调理板设计信号调理板的主要功能是调理被测部件的信号(一般是电压信号),是整个平台设计的重要内容㊂测试过程中输入输出信号繁多,为适应多车型检测需求,采用模块化设计思想㊂部件被测信号范围很宽,直流信号最大可达135V,需要调理到数据采集卡的量程内㊂被检测部件通过电缆连接检测平台相应的航空插头,检测电缆将部件输出信号首先发送给信号调理板,信号调理板通过信号调理模块将信号调理到P C I数据采集卡允许的信号范围内后,工控机操作数据采集卡完成数据采集,其结构图如图2所示㊂工控机实时显示被测部件的功能情况,发送控制与激励信号,并实现数据汇总㊁显示和存储㊂信号调理板设计及信号流向图如图2所示㊂图2信号调理板硬件设计及信号流向图F i g.2 H a r d w a r e d e s i g n f o r s i g n a l c o n d i t i o n i n g b o a r d a n ds i g n a l f l o w d i a g r a m2.1开关量控制电路为了测试被测部件的工作性能,需要切换被测部件内部不同的继电器或接触器开关,使部件工作于不同工况㊂开关量控制电路控制继电器实现部件内不同工况的切换㊂如其中部分开关电路如图3所示,P C04是数字量输出卡P C I-1751的1个引脚㊂当P C04输出高电平时,固体继电器G25工作,被测部件X2_16接口接入+26V电压㊂2.2电压预处理电路被测部件输出信号大于10V时,采用分压电阻进行分压,通过计算选择合适阻值的分压电阻,将部件输出的电压信号调理到数据采集卡接受的范围内㊂炮控箱的1个信号处理电路如图4所示㊂X S 的G2_1㊁G4_20信号电压为15V左右㊂选用2个62kΩ和30kΩ分压电阻进行分压,分得的电压应为5V左右,在数据采集卡接受范围之内,再由数据采集卡将该信号引至模拟量输入卡P C I-1713的A I11㊁A I12管脚进行测量㊂图3开关量控制电路F i g.3 C o n t r o l c i r c u i t f o r s w i t c h i n g v a l u e图4分压电路F i g.4 V o l t a g e d i v i d e r c i r c u i t2.3交流预处理电路交流信号处理电路原理图如图5所示,选用S P T204A电流型电压互感器进行交流电压采集,此型号电压互感器精度高㊁无漂移㊁可有效进行电磁隔离,可以将三路交流信号调理到采集卡可接受的范围㊂图5交流预处理电路F i g.5 A C p r e p r o c e s s i n g c i r c u i t2.4信号放大电路炮控系统中有一些微小的信号需要进行放大后才能由数据采集卡进行采集㊂因此,选用L M358双运算放大器,其内部含有2个独立的㊁高增益㊁内部频率补偿的双运算放大器,可适合于宽电源电压范围的单电源工作模式使用及双电源工作模式㊂信号放大电路如图6所示,放大器接正负15V电源并附加电容C1㊁C2,信号输入端接2个二极管及1个电容起保护和滤波作用,电阻R50㊁R54和运算放大54第4期周建军等.坦克炮控系统综合检测平台设计器构成一路正相比例运算放大器,电阻R 53㊁R 55和运算放大器构成另一路放大电路㊂同相比例放大倍数为:A u r 1=1+R 54R 50; A u r 2=1+R 55R 53输出信号接入P C I -1713的通道实现电压采集㊂图6 信号放大电路F i g .6 S i g n a l a m pl i f i e r c i r c u i t1个型号坦克部件检测的信号调理板的印刷线路板实物图如图7所示㊂信号调理板尺寸为30c m ˑ140c m ㊂该型号坦克的信号调理板制作加工实物图如图8所示㊂图7 信号调理板版图F i g .7 S i g n a l c o n d i t i o n i n g b o a r d l a yo ut 图8 信号调理板实物图F i g .8 P h y s i c a l m a p f o r s i g n a l c o n d i t i o n i n g bo a r d 3 综合检测软件设计3.1 故障树故障诊断方法应用炮控装置综合控制箱(炮控箱)是炮控系统的综合控制部件,是炮控系统的心脏,几乎与炮控系统的各个部件都有关系,其可靠性直接关系到坦克武器性能㊂因此,选择硬件系统中的炮控箱进行主要的研究和分析,并对其建立故障树㊂步骤1:确定顶事件㊂建立炮控箱故障树是为了对炮控箱进行有效的故障诊断,不论系统何处发生故障均可认为是炮控箱发生故障,故顶事件选取为炮控箱故障,对应事件代码为T ,如表1所示㊂表1 故障事件编码T a b l e 1 F a u l t e v e n t c o d i n g事件代码事件名称T 炮控箱故障M 1电源信号故障M 2水平信号故障M 3垂直信号故障M 4系统开关信号异常M 5火控计算机信号异常x 1直流供电异常x 2交流供电异常x 3正负15V 电源异常x 4正负18V 电源异常x 5135V 电源异常x 6水平瞄准控制信号始端异常x 7水平瞄准控制信号末端异常x 8陀螺仪组水平角度/速度信号异常x 9水平放大输出异常x 10垂直瞄准控制信号始端异常x 11垂直瞄准控制信号末端异常x 12陀螺仪组垂直角度/速度信号异常64北京石油化工学院学报2020年第28卷续表1事件代码事件名称x13垂直放大输出异常x14垂直功率输出异常x15炮塔固定机触点开关前端信号异常x16炮塔固定机触点开关后端信号异常x17驾驶窗安全信号异常x18装表工况控制信号异常x19高低机第一位信号异常x20高低机第二位信号异常x21稳像水平控制信号异常x22稳像垂直控制信号异常步骤2:确定中间事件㊂对应表1中的事件代码M1~M5㊂步骤2:确定底事件㊂对应表1中事件代码x1 ~x22㊂所建立的故障树如图9所示㊂图9炮控箱故障树F i g.9 F a u l t t r e e f o r g u n c o n t r o l b o x故障树定性分析的目的在于寻找导致顶事件发生的全部可能原因及其组合,识别导致顶事件发生的故障模式和分析系统潜在的故障[10]㊂故障树中可以引起顶层事件发生的底事件合集称为1个割集,最小割集是那些属于去掉其中任何1个底事件就不再成为割集的底事件集合,仅当最小割集所包含的底事件同时存在时,顶事件才发生㊂使用上行法进行计算,计算过程如下:M5=x21+x22(1) M4=x15+x16+x17+x18+x19+x20(2)M3=x10+x11+x12+x13+x14(3)M2=x6+x7+x8+x9(4)M1=x1+x2+x3+x4+x5(5)T=M1+M2+M3+M4+M5(6)故得:T=x1+x2+x3+x4+ +x22(7)所以炮控箱故障的最小割集为:{x1},{x2},{x3},{x4},{x5}, ,{x22}由以上分析可得炮控箱故障树的22个最小割集,表示炮控箱发生故障的22种模式,由于最小割集均为1个基本事件组成的一阶割集,因此每一基本事件的发生都会导致顶事件的发生㊂3.2检测软件设计利用v i s u a l C#.n e t语言和S Q L S e r v e r数据库编写综合检测软件,软件应用程序安装于工控机上[11]㊂软件在设计过程中采用模块化㊁层次化的设计方法,综合检测软件主要包括部件检测模块㊁数据查询模块㊁故障分析模块和系统维护模块㊂部件检测模块完成被测试部件的功能检测,并完成一键检测㊂数据查询模块进行测试数据的按日期查询和数据统计功能㊂故障分析模块根据检测数据分析故障可能发生的位置㊂系统维护模块实现用户和密码管理功能㊂软件的工作流程图如图10所示㊂综合检测软件炮控箱性能检测界面如图11所示,用户可以从下拉列表框中选择检测项完成单项检测,测试值显示在表格中,也可以以曲线形式显示,通过不同的给定条件观察测试项的输出信号变化㊂点击 全部自动测试 按钮,软件自动完成每个测试项自动检测功能㊂图10综合检测软件工作流程图F i g.10 C o m p r e h e n s i v e d e t e c t i o n s o f t w a r e w o r k f l o w图11综合检测软件界面F i g.11 C o m p r e h e n s i v e i n s p e c t i o n s o f t w a r e i n t e r f a c e74第4期周建军等.坦克炮控系统综合检测平台设计4综合检测平台结构检测平台主要包括工控机I P C-610L㊁计算机接口板㊁信号调理板㊁检测电缆㊁A C400H Z电源箱㊁D C电源箱㊁设备操作面板㊁显示屏(22吋触摸式彩色屏)和武器部件接口板㊂计算机接口板实现A O㊁D O板卡输出信号的一对多转换,这样每一块信号调理板都可以引入A O和D O信号㊂电源箱可以提供4种电压:24V D C25A㊁ʃ15V D C5A㊁ʃ18V D C3A㊁5V D C500m A㊂炮控系统综合检测平台的内部视图如图12所示㊂综合检测平台可对5种车型的主要部件进行检测㊂1个信号调理板检测1个车型的部件,计算机接口板用于连接信号调理板和数据采集卡㊂检测部件时通过检测电缆连接被测部件,根据手册操作说明完成各部件的功能检测㊂图12炮控系统综合检测平台的内部视图F i g.12 I n t e r n a l v i e w o f t h e i n t e g r a t e d d e t e c t i o n p l a t f o r mf o r t h eg u n c o n t r o l s y s t e m5结论针对某型坦克炮控系统,利用工控机作为主控单元,集成5块P C I数据采集卡,实现了对炮控系统的部件检测㊂基于故障树智能诊断方法实现了炮控箱故障定位㊂此设备经有关单位使用,检测准确率高㊁软件界面友好㊁方便操作使用,较好地解决了有关型号坦克快速检修的问题㊂参考文献[1]窦亚力,王惠源,张鹏军,等.火炮炮控故障综合检测系统总体设计[J].火力与指挥控制,2011,36(2): 184-187.[2]张金忠,苏忠亭,赵富全,等.坦克火炮反后坐装置在线检测方法研究[J].火炮发射与控制学报,2010(2): 90-93.[3]张振山,赵俊严,赵富全.坦克自动装弹机故障诊断技术[J].火炮发射与控制学报,2006(S1):50-52,57.[4]周启煌,单东升,张豫南.坦克火控系统的控制主线及炮控系统[J].装甲兵工程学院学报,1995(2):13-20.[5]马晓军,袁东,臧克茂,等.数字全电式坦克炮控系统研究现状与发展[J].兵工学报,2012,33(1):69-76. [6]朱斌,张雷,邱小波,等.某型坦克炮控检测系统的实现[J].装甲兵工程学院学报,2002,16(3):26-28. [7]张成名,罗坤,刘宁.便携式武器装备电子系统综合检测仪[J].兵工自动化,2012,4:82-85.[8]周薇,刘庆生.嵌入式火控系统软件故障树分析研究[J].现代电子技术,2015,38(8):105-108. [9]彭华亮.基于故障树的故障诊断专家系统软件平台设计[D].南京:南京理工大学,2017.[10]李贵虎,李强,赵君官,等.基于故障树的机械击发故障仿真分析[J].机械设计,2013,30(3):8-11. [11]张毅,李夏青,范圣韬.基于V C和M a t l a b混合编程的牵引供电故障诊断系统[J].北京石油化工学院学报, 2008(3):21-25.84北京石油化工学院学报2020年第28卷。
基于陀螺仪的炮塔角速度测量装置的设计
江杰;张正飞;戴颖超;胡晓莉
【期刊名称】《测控技术》
【年(卷),期】2015(034)010
【摘要】针对国内炮控系统性能参数测试中对角速度测量的成本较高、操作复杂、时间较长等问题,设计了一种基于MEMS陀螺仪的炮塔角速度高精度测量装置,通
过中值滤波、均值滤波以及加权平均融合的方法,抑制了测量噪声等因素对炮塔角
速度值的影响.通过在转台和坦克上对该装置进行标定和测试,分析了滤波和融合前后的实验结果,其对炮塔角速度的测量精度可达0.02°/s.该装置操作简单、灵敏度高、成本较低、实用性强,能有效地提高测试精度,节省了人力物力,缩短了测量时间,满足实际应用的需求,具有很高的实用价值.
【总页数】4页(P6-8,18)
【作者】江杰;张正飞;戴颖超;胡晓莉
【作者单位】内蒙古科技大学信息工程学院,内蒙古包头014010;内蒙古科技大学
信息工程学院,内蒙古包头014010;北京理工雷科电子信息技术有限公司,北京100081;内蒙古科技大学信息工程学院,内蒙古包头014010
【正文语种】中文
【中图分类】TP216
【相关文献】
1.角速度陀螺仪自动测试系统设计 [J], 崔亚君;高峰娟;高艳丽
2.炮塔方位角测量装置应用 [J], 裴益轩;霍文妮;王光华;曹大劳
3.基于角速度传感器与DSP的三维陀螺仪 [J], 黄然;吕紫旭;金惠华
4.一种MHD角速度传感器与MEMS陀螺仪组合测量系统信号融合的方法 [J], 李醒飞;周新力;吴腾飞;纪越
5.基于压电陀螺仪的小型惯性测量装置 [J], 刘勇;李泽莉;蔡体菁
因版权原因,仅展示原文概要,查看原文内容请购买。
№.1(Total81)电光与控制2001年第1期feb.2000ELEC TRO NIC S OPTI CS&CON TROL(总第81期)文章编号:1227(2001)01—0028--04航空炮塔随动系统稳定性设计鞠传文杨秀珍 (海军航空工程学院青岛分院青岛266041)摘要:航空炮塔的稳定性、准确性和快速性是其发挥作用的关键。
本文通过对航空炮塔随动系统中稳定环节的理论分析与计算机仿真技术,得出了一种提高该系统稳定性的具体方法。
按该方法设计的某炮塔随动系统,无论输入的是小位差信号,还是大位差信号,该系统均具有良好的稳定性。
关键词:炮塔;随动系统;稳定性中图分类号:E926.1文献标识码:ADesign on a Barbette Servo SystemJU Chuan--wen Y A N G X iu--z he n(Navy Aer o n a ut i c Engi neerin g Institute Qingdao266041)Abstract;The stabil it y,pr eci sio n a nd high response speed a r e the key factors of a ba rbett e system.In this p a p e r,t h e author finds o u t a way which c an impr ov e the stability of the b a rb e t t e s e r v o system through theoretical analysis of its stable loops and simulation.The experiment sh o ws that a certain barb ett e s e r v o system designed by this w ay has a good stability both i n thec a s e of small a nd big angle differ ence.Key Words:barbette;s e r v o system;stability;con tr01theory来提高加在驱动电机(执行元件)上的电压,使系统1 引言在大位差角时具有足够的快速跟踪能力,解诀了“快”的问题;但由于系统功率大、控制对象质量大、炮塔随动系统性能的好坏直接关系到能否有效电磁元件多、电磁惯性大等特点都会影响随动系统的稳定性,而稳定是炮塔的主要问题,特别是在瞄准地消灭敌机保存自己。
坦克炮塔信息检测传输仪的设计
黄志瑛;麻伟忠;冯根生
【期刊名称】《计算机测量与控制》
【年(卷),期】2004(12)1
【摘要】坦克炮塔设备使用信息的检测和传输是一难点技术.通过对坦克全车电路和炮塔旋转联结器的分析,采用单片机和双音频编解码技术,复用车内通话器线路,成功地将炮塔信息传输到全车记录仪,达到了对炮塔设备使用的实时监控.实践证明,这是在不改装备前提下实现通讯的有效办法.同时也阐述了检测仪硬件、软件的设计及其防低温措施.
【总页数】4页(P71-73,97)
【作者】黄志瑛;麻伟忠;冯根生
【作者单位】蚌埠坦克学院,安徽,蚌埠,233013;蚌埠坦克学院,安徽,蚌埠,233013;蚌埠坦克学院,安徽,蚌埠,233013
【正文语种】中文
【中图分类】TP216.1
【相关文献】
1.基于陀螺仪的炮塔角速度测量装置的设计 [J], 江杰;张正飞;戴颖超;胡晓莉
2.坦克炮塔转动惯量测量方案设计 [J], 徐静;门义双
3.基于陀螺仪的坦克炮控稳定精度检测仪设计 [J], 王春忠;杨忠国;荣明;王秋良;王钦钊
4.全自动坦克炮塔壳体内外壁抛喷丸清理机的设计 [J], 刘志强
5.基于WiFi远程检测与传输PM2.5数值检测仪设计 [J], 郑阳;陈美玲;李欣鹏;陈帅
因版权原因,仅展示原文概要,查看原文内容请购买。
炮塔转动参数检测系统设计作者:郭旻蔡振兴欧阳元兵
来源:《科教导刊·电子版》2019年第24期
摘要目前炮塔转动参数检测方法存在测量精度偏低、操作复杂、抗干扰能力差的缺点,我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量系统,系统由ARM主控单元,MEMS惯性测量单元,WiFi模块,存储模块组成。
通过在标准转台上的标定和在某型坦克上的实验,该系统满足测试精度要求,节省了人力物力,缩短了测量时间,满足实际应用的需求。
关键词转动参数非接触测量微机电系统炮控系统
中图分类号:TM935 文献标识码:A
0绪论
炮塔是安装在装甲车、坦克、舰艇上的瞄准发射武器系统装置,能够围绕水平轴做360度无死角旋转,并且能够做45度角的俯仰运动,具有两个自由度。
炮塔转动参数包括角速度量和角度量。
目前测量方法主要有CCD点光源法、PSD光学测量靶法、光纤陀螺法、电测法等。
这些测量方法在精度和测量灵活性上都有缺陷。
我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量装置,用来弥补上述测量方法的不足,以满足实际需求。
1测量原理
本系统主要测量的量是炮塔转动的角速度及角度,我们选用的惯性测量单元MEMS九轴传感器MPU9250。
它包括三轴16位高精度AD组成的陀螺仪,三轴16位高精度AD组成的的加速度计与三轴6位磁力计,以及一个可扩展的数字运动处理器DMP。
角速度的测量装置主要是陀螺仪,然后辅以加速计来进行修正。
角度的测量是通过陀螺仪、加速计和磁力计测量的数据信息进行融合得到的,融合后的角度即是姿态角(如图1所示),即x轴的俯仰角Pitch、y轴的滚转角Roll、z轴的偏航角Yaw。
测量时我们只需把传感器固定在炮管上,通过读取MPU9250输出的数据,即可得到炮塔转动的角速度及角度量,其中z轴得到的是炮塔水平方向的值,x轴得到的是炮塔垂直方向的俯仰值。
2系统方案设计
我们选用MEMS结构的惯性测量传感器件测量得到炮塔转动的角速度和角度数据,然后经由I2C通信总线传给测量单片机对数据进行转换和处理。
处理运算完成的数据可就地存储,并经由无线模块将数据实时发給上位机进行显示。
在整个测量过程中只需将测量装置放置在炮管上,不需要其他的辅助设备。
MEMS惯性测量单元属于非接触式传感器,这种测量方式对现有方式有很大的创新改进,使得测量进行便捷灵活。
测量数据的传输采用WiFi无线的形式,不需要硬件连线,便于在复杂、空间有限的调试现场进行测量。
炮塔在测试机动性能时,炮管振动剧烈,而且一旦炮塔的驱动电机开启会带来很强的电磁干扰,这对测量上会产生很大的干扰,形成噪声。
同时MEMS惯性测量传感器件也存在漂移的问题,积分会累计误差,所以得运用相应的滤波算法对数据进行处理。
为了减小误差,选用多片MEMS惯性测量传感器件进行采集数据,然后对同一时刻多片陀螺仪所采的数据进行比对复合,数据的处理及测量传感器的驱动由ARM单片机完成。
针对于不同的数据测量量采用不同的滤波方法,如角速度只需算术平均滤波便可以保证精度;而对于角度值测量,因为它的计算是由多个多轴传感器的数据进行融合运算得出,我们采用卡尔曼滤波进行处理,以达到精度要求。
系统框图如图2所示。
2.1系统硬件设计
系统主控芯片选用STM32F103ZET6,测量模块为JY-901,模块集成MPU9250,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时
运动姿态,姿态测量动态精度为0.1€?s,静态精度位0.01度,稳定性极高。
支持串口和I2C 两种数字接口输出。
串口速率2400bps-921600bps可调,I2C接口支持全速400K速率。
本装置采用无线方式与上位机通信,无线WiFi模块为HLK-RM04高性能、低成本UART-ETH-WIFI模块。
该模块是基于通用串行接口的符合网络标准的嵌入式模块,内置TCP/IP协议栈,能够实现用户串口、以太网、无线网(WiFi)3个接口之间的转换。
它能稳定可靠的把串口数据转成WiFi热点,并支持全双工工作模式。
工作时只需用平板、手机、PC机等平台安装好专门开发的上位机便可能实现显示和控制。
装置在完成一次数据的测量后,会实时(下转第279页)(上接第268页)的将所测得的数据显示在上位机上。
除了实时显示所测数据外,本装置自带有数据存储模块,要将每次测量的数据自动存储在TF卡中,这样便于后期对所测数据的分析和参数指标标定。
2.2系统软件设计
软件部分主要包含单片机的初始化、九轴MPU6050姿态传感器初始化以及数据读取等等,其中单片机的初始化包括时钟初始化、串口初始化时钟配置以及串口1和串口2的配置,所采用的语言是C语言,系统软件的设计主要是对算法解算、数据融合以及通过串口传输数据。
系统的软件设计框图如图3所示。
3总结
我们所设计的基于MEMS惯性测量单元的炮塔转动参数测量系统,解决了传感器的零漂和测量数据的突变、波动问题。
通过在标准转台上的标定和在某型坦克上的实验,该装置的测量动态精度为0.1€?s,静态精度位0.01度,稳定性高。
本装置操作简单、灵敏度高、成本较低、实用性强,能有效地提高测试精度,节省了人力物力,缩短了测量时间,满足实际应用的需求,具有很高的实用价值。
参考文献
[1] 张炎华,玉立端,战兴群,翟传润.惯性导航技术的新进展及发展趋势[J].中国造船,2008(10):134-140.
[2] 王春忠,杨忠国,荣明,王秋良,王钦钊.基于陀螺仪的坦克炮控稳定精度检测仪设计[J].传感器与微系统,2009,28(01):85-87.
[3] 李华,马晓军,臧克茂等.电传动坦克模糊控制器仿真研究[J].装甲兵工程学院学报,2002(06):45-49.
[4] 朱竞夫,赵碧君,王饮钊.现代坦克火控系统[M].北京:国防工业出版社,2003.。